



 0
0
Notice (8): Undefined index: name_eng [APP/View/Elements/menu.ctp, line 56]Code Context<div class="accordion-heading"><a class="accordion-toggle" <?php if(!empty($dm_c2)){?>data-toggle="collapse" data-parent="#accordion2" href="#collapse<?php echo $cap1['Catproduct']['id'];?>" title="<?php echo $cap1['Catproduct']['name'.LANGUAGE];?>"<?php }else{?>href="<?php echo DOMAIN.$cap1['Catproduct']['slug'];?>"<?php }?>><?php echo $cap1['Catproduct']['name'.LANGUAGE];?>$viewFile = '/home/tracdiathanhda/domains/tracdiathanhdat.vn/public_html/app/View/Elements/menu.ctp' $dataForView = array( 'cat12' => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'description_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'keywords_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'title_for_layout' => 'Máy kinh vĩ', 'tinmoiup' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'tinlq' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'detailNews' => array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'setting' => array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ), 'tin_ft' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'slideshow' => array( (int) 0 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 1 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 2 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 3 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 4 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 5 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 6 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 7 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 8 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 9 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 10 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 11 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 12 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 13 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 14 => array( 'Slideshow' => array( [maximum depth reached] ) ) ), 'adv_khuyenmai' => array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ), 'doitac' => array( (int) 0 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 1 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 2 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 3 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 4 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 5 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 6 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 7 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 8 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 9 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 10 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 11 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 12 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 13 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 14 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 15 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 16 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 17 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 18 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 19 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 20 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 21 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 22 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 23 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 24 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 25 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 26 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 27 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 28 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 29 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 30 => array( 'Advertisement' => array( [maximum depth reached] ) ) ), 'chayphai' => array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ), 'chaytrai' => array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ), 'chiasekinhnghiem' => array(), 'list_menu_footer' => array(), 'danhmuc_left_parent_sphot' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc_left_parent' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'support' => array( (int) 0 => array( 'Support' => array( [maximum depth reached] ) ), (int) 1 => array( 'Support' => array( [maximum depth reached] ) ) ), 'content_for_layout' => '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ', 'scripts_for_layout' => '' ) $cat12 = array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $description_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $keywords_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $title_for_layout = 'Máy kinh vĩ' $tinmoiup = array( (int) 0 => array( 'Post' => array( 'id' => '823', 'name' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật – Những bước quan trọng để đảm bảo độ chính xác', 'code' => null, 'alias' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-–-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập trạm Base RTK đúng cách có quan trọng không? Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Thiết lập trạm Base RTK đúng cách có quan trọng không?<br /> <br /> Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.<br /> <br /> Mặc dù giao diện phần mềm của mỗi hãng có thể khác nhau, quy trình thiết lập Base nhìn chung đều tuân theo các nguyên tắc giống nhau. Dưới đây là các bước cơ bản giúp triển khai một trạm Base RTK ổn định và đáng tin cậy.</em><br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7881291487147_f174a50258d6ad97ccd34f717df81a2b.jpg" style="width: 800px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Chọn vị trí đặt Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quan trọng nhất trước khi bật máy. Một vị trí tốt nên đáp ứng các điều kiện sau:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thoáng, có góc quan sát bầu trời rộng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh cây lớn, mái che hoặc công trình cao tầng che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế đặt gần tường kính, mái tôn hoặc mặt nước để giảm hiện tượng phản xạ tín hiệu (Multipath).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh gần đường dây điện cao thế hoặc nguồn phát sóng mạnh nếu có thể.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nền đất hoặc mặt bằng ổn định, ít rung động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu đặt Base trên mốc khống chế, cần đảm bảo mốc không bị xê dịch trong suốt quá trình đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lắp chân máy và định tâm</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi chọn vị trí phù hợp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở chân máy chắc chắn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều chỉnh chiều cao thuận tiện cho việc thao tác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định tâm chính xác trên mốc bằng dọi quang học hoặc dọi laser (nếu có).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng bọt thủy theo hướng dẫn của thiết bị.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trường hợp sử dụng chân máy thông thường ngoài hiện trường, nên kiểm tra lại việc định tâm sau khi siết chặt các khóa chân máy vì quá trình thao tác có thể làm lệch vị trí ban đầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Đo chiều cao anten</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten là một thông số rất quan trọng. Thông thường, phần mềm sẽ yêu cầu người dùng nhập:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao nghiêng (Slant Height), hoặc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao đứng (Vertical Height).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần đo đúng theo phương pháp mà phần mềm yêu cầu.<br /> <br /> > Một số lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng thước chuyên dụng nếu có.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo ít nhất hai lần để kiểm tra.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại đơn vị (mét hoặc milimét).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không ước lượng bằng mắt.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc nhập sai chiều cao anten sẽ làm sai tọa độ của trạm Base và có thể ảnh hưởng đến toàn bộ dữ liệu hiệu chỉnh RTK.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Thiết lập tọa độ Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quyết định hệ quy chiếu mà Rover sẽ sử dụng. <br /> <br /> 4.1 Trường hợp 1: Base đặt trên điểm đã biết tọa độ (<strong>Known Point</strong>)<br /> <br /> Đây là phương pháp được ưu tiên. Người dùng nhập chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X, Y, H hoặc B, L, H.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ tọa độ tương ứng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi xác nhận, Base sẽ phát dữ liệu hiệu chỉnh dựa trên tọa độ đã biết.<br /> <br /> > Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ tin cậy cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với đo địa chính, khảo sát công trình, hoàn công và các công việc yêu cầu liên kết với hệ tọa độ hiện có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 4.2 Trường hợp 2: <strong>Base Here</strong> (Base tự xác định tọa độ)<br /> <br /> Nếu chưa có mốc khống chế, người dùng có thể để máy tự xác định vị trí hiện tại (Base Here hoặc Autonomous).<br /> Phương pháp này thường được sử dụng khi:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát sơ bộ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập lưới khống chế tạm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình chưa yêu cầu liên kết với hệ tọa độ chính thức.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu ý rằng tọa độ Base Here chỉ mang tính tương đối. Nếu cần liên kết với hệ tọa độ công trình hoặc VN-2000, nên đo khống chế hoặc sử dụng các phương pháp chuyển đổi phù hợp trước khi triển khai chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cấu hình truyền dữ liệu cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Base có tọa độ, cần cấu hình phương thức truyền dữ liệu hiệu chỉnh đến Rover. Hai phương thức phổ biến hiện nay là:<br /> <br /> <strong>5.1 Truyền bằng Radio UHF</strong><br /> <br /> Khi dùng phương thức này cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tần số phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Băng thông (Bandwidth).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao thức truyền (Protocol).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten UHF đã được lắp đúng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base và Rover phải sử dụng cùng cấu hình để có thể liên lạc.<br /> <br /> <strong>5.2 Truyền qua Internet (NTRIP)</strong><br /> <br /> Trong trường hợp sử dụng mạng Internet nội bộ hoặc triển khai Base riêng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra kết nối 4G/5G hoặc Wi-Fi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra địa chỉ IP hoặc Caster.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Port.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mountpoint.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tài khoản và mật khẩu nếu có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Kiểm tra trạng thái phát cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi hoàn tất cấu hình, cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base đã bắt đủ số lượng vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đã bắt đầu phát dữ liệu cải chính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không xuất hiện cảnh báo lỗi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radio hoặc Internet hoạt động ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin hoặc nguồn ngoài đủ cho thời gian làm việc.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các hệ thống Radio, nên kiểm tra thêm cường độ tín hiệu giữa Base và Rover trước khi bắt đầu đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Kiểm tra Rover đã FIX ổn định</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Rover kết nối với Base, không nên đo ngay. <br /> <br /> Nên kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm đạt FIX.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lượng vệ tinh ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PDOP ở mức phù hợp.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Age of Correction thấp và ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số RMS hoặc Estimated Precision nằm trong giới hạn cho phép của công việc.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu Rover liên tục chuyển giữa FIX và FLOAT, cần kiểm tra lại:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách đến Base.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu Radio hoặc Internet.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình truyền dữ liệu.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Một số lỗi thường gặp khi thiết lập Base</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đặt Base không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt dưới tán cây, gần nhà cao tầng hoặc gần nguồn phản xạ mạnh có thể làm giảm chất lượng quan sát GNSS.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo sai chiều cao anten</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá phổ biến và có thể ảnh hưởng đến kết quả tính toán tọa độ của trạm Base.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai tọa độ Base</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ, sai kinh tuyến trục, sai cao độ hoặc nhập nhầm tọa độ sẽ khiến Rover đo sai toàn bộ.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai cấu hình Radio</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác tần số, giao thức hoặc công suất giữa Base và Rover sẽ khiến Rover không nhận được dữ liệu hiệu chỉnh.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Di chuyển Base trong khi đang đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu chân máy bị dịch chuyển trong quá trình làm việc, toàn bộ kết quả sau thời điểm dịch chuyển đều có thể không còn đảm bảo độ tin cậy và nên được kiểm tra hoặc đo lại.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguồn điện không đủ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base mất nguồn hoặc khởi động lại giữa ca đo sẽ làm gián đoạn việc truyền dữ liệu hiệu chỉnh đến Rover.<br /> <br /> >>> Thiết lập Base RTK không chỉ là vài thao tác trên bộ điều khiển mà còn bao gồm việc lựa chọn vị trí đặt máy, định tâm chính xác, nhập đúng chiều cao anten, cấu hình tọa độ và kiểm tra trạng thái hoạt động của toàn bộ hệ thống. Thực hiện đúng các bước ngay từ đầu sẽ giúp Rover nhận dữ liệu hiệu chỉnh ổn định, giảm thời gian xử lý sự cố ngoài thực địa và nâng cao độ tin cậy của kết quả đo.<br /> <br /> Mặc dù tên gọi các chức năng hoặc giao diện có thể khác nhau giữa các hãng, nguyên tắc thiết lập trạm Base về cơ bản vẫn tương tự. Nắm vững các nguyên lý này sẽ giúp người sử dụng dễ dàng làm việc với nhiều dòng RTK khác nhau.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 260626.png" style="width: 800px; height: 533px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Liên hệ ngay <a href="https://zalo.me/0913051734"><span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt qua Zalo</strong></span></a> để được tư vấn chọn máy phù hợp nhất!</span></span><br /> <a class="zalo-float" href="https://zalo.me/0949322456" rel="noopener" target="_blank"> <span class="zalo-icon">Z</span> <span class="zalo-text">Nhắn Zalo</span> </a> <style type="text/css"> .zalo-float { position: fixed; right: 20px; bottom: 90px; z-index: 9999; display: flex; align-items: center; gap: 8px; background: #0068ff; color: #fff; padding: 12px 16px; border-radius: 999px; font-weight: 700; font-size: 15px; text-decoration: none; box-shadow: 0 8px 24px rgba(0,0,0,0.22); } .zalo-float:hover { transform: translateY(-2px); opacity: 0.95; } .zalo-icon { width: 28px; height: 28px; border-radius: 50%; background: #fff; color: #0068ff; display: flex; align-items: center; justify-content: center; font-weight: 800; } @media (max-width: 768px) { .zalo-float { right: 14px; bottom: 80px; padding: 11px 14px; font-size: 14px; } }</style> ', 'images' => '202606260951032f4d94b16f8c4b40c845fa69fd0c4dc4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật từ A đến Z', 'meta_key' => '', 'meta_des' => 'Hướng dẫn chi tiết cách thiết lập trạm Base RTK: chọn vị trí, định tâm, đo chiều cao anten, cấu hình Known Point hoặc Base Here, Radio/NTRIP và các lỗi thường gặp.', 'created' => '2026-06-26', 'modified' => '2026-07-12', 'status' => '1', 'view' => '525', 'slug' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '557', 'rght' => '558', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '822', 'name' => 'Hiểu đúng về RTCM 1021–1027, Helmert (Bursa-Wolf), 7 tham số và chuyển đổi hệ tọa độ', 'code' => null, 'alias' => 'hieu-dung-ve-rtcm-1021–1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàncầu sang hệ tọa độ làm việc tại địa phương.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàn cầu sang hệ tọa độ làm việc tại địa phương.<br /> <br /> Vậy RTK thực chất đo trong hệ nào?<br /> <br /> Máy thu GNSS không đo trực tiếp trong hệ tọa độ VN-2000. Thay vào đó, thiết bị xác định vị trí trong một hệ quy chiếu địa tâm toàn cầu (global geocentric reference frame), chẳng hạn như WGS84 hoặc các realization gần với ITRF (International Terrestrial Reference Frame).<br /> <br /> Trong khi đó, tại Việt Nam, phần lớn bản đồ địa hình, bản đồ địa chính, hồ sơ thiết kế và công trình lại sử dụng hệ tọa độ VN-2000 hoặc hệ tọa độ công trình. <br /> <br /> Vì vậy, trước khi có thể sử dụng ngoài thực địa, kết quả đo GNSS cần được chuyển đổi sang hệ tọa độ làm việc.<br /> <br /> Có thể hình dung quy trình tổng quát như sau: <strong>GNSS/RTK → WGS84 hoặc ITRF (realization cụ thể) → Chuyển đổi hệ quy chiếu và phép chiếu bản đồ (khi cần) → VN-2000 hoặc hệ tọa độ công trình.</strong><br /> <br /> <em>Lưu ý: WGS84 và ITRF đều có nhiều phiên bản (realizations) được cập nhật theo thời gian. Trong hầu hết công việc RTK thông thường, quá trình này đã được phần mềm RTK hoặc dịch vụ CORS xử lý. Tuy nhiên, với các ứng dụng yêu cầu độ chính xác cao hoặc xử lý dữ liệu nhiều thời kỳ, vẫn cần quan tâm đến reference frame và epoch của dữ liệu.</em></span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. 7 tham số là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trắc địa, một trong những mô hình phổ biến để chuyển đổi giữa hai hệ quy chiếu là phép biến đổi 7 tham số (Seven-Parameter Transformation).<br /> <br /> Bộ tham số gồm: </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔX: Tịnh tiến theo trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔY: Tịnh tiến theo trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔZ: Tịnh tiến theo trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rx: Góc quay quanh trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ry: Góc quay quanh trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rz: Góc quay quanh trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Scale: Hệ số tỷ lệ (ppm)</span></span></li> </ul> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/coordtrans datum transformation.gif" style="width: 613px; height: 407px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong đó:<br /> - Ba tham số đầu mô tả sự dịch chuyển giữa hai hệ quy chiếu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ba tham số tiếp theo mô tả sự quay.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Tham số cuối cùng mô tả sự khác biệt về tỷ lệ.</span></span></span></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình này giả thiết rằng mối quan hệ giữa hai hệ quy chiếu có thể được biểu diễn bằng một phép biến đổi gồm ba tham số tịnh tiến, ba tham số quay và một tham số tỷ lệ.<br /> <br /> Trong các phần mềm RTK, người dùng có thể gặp nhiều tên gọi như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Seven Parameters</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Helmert Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bursa-Wolf Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Datum Transformation</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư hiện trường, điều quan trọng cần nhớ là: 7 tham số là một mô hình dùng để chuyển đổi giữa hai hệ quy chiếu.<br /> <br /> Trong những khu vực có biến dạng không đồng nhất, mô hình này có thể không đạt độ chính xác cao bằng các phương pháp sử dụng lưới hiệu chỉnh (Grid Shift).<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Bursa-Wolf và Helmert có giống nhau không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là điểm khá nhiều người nhầm lẫn. Trong nhiều phần mềm RTK, hai tên gọi: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Helmert Transformation & </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Bursa-Wolf Transformation </span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">được sử dụng gần như thay thế cho nhau. <br /> <br /> Tuy nhiên, xét dưới góc độ học thuật, Bursa-Wolf là một quy ước biểu diễn của phép biến đổi Helmert 7 tham số. Sự khác biệt chủ yếu nằm ở quy ước dấu và cách biểu diễn các tham số quay. Đối với phần lớn công việc RTK ngoài thực địa, sự khác biệt này thường không ảnh hưởng đến quá trình sử dụng nếu các tham số được khai báo đúng theo quy ước mà phần mềm yêu cầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Ngoài 7 tham số còn có những phương pháp nào?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi phép chuyển đổi tọa độ đều sử dụng mô hình 7 tham số. Một số phương pháp phổ biến khác gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Molodensky–Badekas</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp này cũng sử dụng bảy tham số nhưng thực hiện phép quay quanh một điểm gốc cục bộ (origin point) thay vì tâm Trái Đất. Cách tiếp cận này thường giúp giảm ảnh hưởng của sai số quay trong các hệ tọa độ địa phương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Grid Shift</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác với mô hình 7 tham số, Grid Shift không sử dụng một bộ tham số chung cho toàn bộ khu vực mà áp dụng các giá trị hiệu chỉnh được nội suy từ lưới.<br /> <br /> Ví dụ: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">NTv2, </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Geoid Grid</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với những khu vực có biến dạng không đồng đều, Grid Shift thường cho độ chính xác cao hơn mô hình 7 tham số.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. RTCM 1021–1027 là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM (Radio Technical Commission for Maritime Services) là tiêu chuẩn quốc tế dùng để truyền dữ liệu hiệu chỉnh trong GNSS RTK. <br /> <br /> Khi nhắc đến RTCM, nhiều người chỉ nghĩ đến các bản tin phục vụ quá trình FIX. Tuy nhiên, trong tiêu chuẩn RTCM 3.x còn có nhóm bản tin 1021–1027, được định nghĩa để truyền các thông tin liên quan đến phép biến đổi datum, phép chiếu bản đồ và một số mô hình hiệu chỉnh phục vụ chuyển đổi sang hệ tọa độ địa phương.<br /> <br /> Theo tài liệu của RTCM SC-104 và một số nhà sản xuất phần mềm GNSS, nhóm bản tin này được thiết kế nhằm hỗ trợ việc chuyển đổi từ hệ quy chiếu GNSS sang hệ tọa độ địa phương. <br /> <br /> Tuy nhiên cần lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi mạng CORS đều phát các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi bộ thu GNSS hoặc phần mềm RTK đều hỗ trợ đầy đủ việc giải mã và áp dụng các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc triển khai có thể khác nhau giữa các phiên bản RTCM, nhà sản xuất thiết bị và dịch vụ CORS.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì vậy, không nên mặc định rằng mọi hệ thống CORS đều truyền hoặc sử dụng RTCM 1021–1027.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1655118093874(1).jpg" style="width: 600px; height: 450px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Vì sao có phần mềm RTK không cần nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, người dùng không cần nhập thủ công, nhưng điều đó không có nghĩa quá trình chuyển đổi không tồn tại. <br /> <br /> Việc chuyển đổi có thể đã được thực hiện thông qua:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cơ sở dữ liệu CRS tích hợp trong phần mềm hoặc bộ điều khiển;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ffile hệ tọa độ (CRS/Projection) được import;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình do nhà sản xuất thiết lập;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin từ dịch vụ CORS;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc các cơ chế chuyển đổi riêng của phần mềm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Do đó, việc không phải nhập không đồng nghĩa với không sử dụng phép chuyển đổi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Khi nào vẫn phải nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số tình huống vẫn cần người dùng thiết lập thủ công, chẳng hạn:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng Base cục bộ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Llàm việc với hệ tọa độ công trình;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng hệ tọa độ địa phương chưa có trong phần mềm;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu khảo sát cũ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc làm việc với các dự án có quy định riêng về hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, người dùng có thể phải:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập 7 tham số;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Import file hệ tọa độ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc thực hiện Site Calibration (Localization).</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. RTCM 1021–1027 có thay thế Site Calibration không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Câu trả lời là không. Hai khái niệm này phục vụ những mục đích khác nhau.<br /> <br /> RTCM 1021–1027 là nhóm bản tin dùng để truyền các thông tin liên quan đến phép chuyển đổi hệ quy chiếu và phép chiếu bản đồ. Trong khi đó, Site Calibration (Localization) là quá trình thiết lập mối quan hệ giữa hệ tọa độ GNSS và hệ tọa độ của dự án thông qua các điểm khống chế ngoài thực địa.<br /> <br /> Site Calibration không thay thế phép chuyển đổi giữa các hệ quy chiếu mà chỉ hiệu chỉnh cục bộ để phù hợp với hệ tọa độ công trình. Ngay cả khi sử dụng mạng CORS và chọn đúng hệ tọa độ, nhiều dự án vẫn yêu cầu kiểm tra trên các mốc khống chế trước khi tiến hành đo chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Những lỗi thường gặp ngoài thực địa</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Qua thực tế sử dụng RTK, một số lỗi liên quan đến hệ tọa độ thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai datum hoặc realization.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai đơn vị của Rx, Ry, Rz (độ, giây hoặc radian).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai hệ số Scale (ppm hoặc hệ số tỷ lệ).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dùng nhầm hệ tọa độ công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tin tưởng trạng thái FIX nhưng không kiểm tra trên mốc khống chế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những nguyên nhân có thể khiến tọa độ sai hàng mét, thậm chí hàng chục mét dù máy vẫn báo FIX bình thường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">9. Người sử dụng RTK cần quan tâm đến điều gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với phần lớn công việc khảo sát, địa chính, thi công hoặc hoàn công, người dùng không nhất thiết phải nhớ chi tiết từng bản tin RTCM.<br /> <br /> Điều quan trọng hơn là:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo đúng Job / Project.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng mountpoint khi dùng CORS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập đúng chiều cao anten.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại trên mốc khống chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ nhìn trạng thái FIX mà bỏ qua cấu hình hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu kết quả đo lệch toàn bộ so với bản vẽ hoặc mốc ngoài thực địa, cần kiểm tra lại hệ tọa độ trước khi nghi ngờ máy RTK hoặc tín hiệu vệ tinh.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> RTCM 1021–1027, Helmert, Bursa-Wolf, 7 tham số và Site Calibration đều liên quan đến quá trình đưa kết quả GNSS về hệ tọa độ làm việc, nhưng chúng không phải là các khái niệm tương đương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS xác định vị trí trong hệ quy chiếu toàn cầu, thường là WGS84 hoặc các realization gần với ITRF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">VN-2000 và hệ tọa độ công trình là các hệ tọa độ làm việc được sử dụng trong khảo sát, thiết kế và thi công tại Việt Nam.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7 tham số (Bursa-Wolf/Helmert) là một trong những mô hình phổ biến dùng để chuyển đổi tọa độ giữa các hệ quy chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM 1021–1027 là nhóm bản tin được thiết kế để hỗ trợ truyền thông tin liên quan đến phép biến đổi tọa độ và phép chiếu bản đồ. Tuy nhiên, việc các bản tin này có được sử dụng hay không còn phụ thuộc vào phiên bản RTCM, hệ thống CORS và phần mềm RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Site Calibration (Localization) là quá trình hiệu chỉnh cục bộ theo các điểm khống chế của dự án và không nên xem là sự thay thế cho các phép biến đổi giữa các hệ quy chiếu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư khảo sát và thi công, hiểu đúng vai trò của từng khái niệm sẽ giúp cấu hình RTK chính xác hơn, xử lý tốt các tình huống liên quan đến hệ tọa độ và hạn chế các sai lệch không đáng có ngoài thực địa.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 230626 2.png" style="width: 800px; height: 533px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;"><u><strong>Tài liệu tham khảo</strong></u></span></span><br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">RTCM Special Committee 104 – <em>RTCM Standard for Differential GNSS (Multiple Signal Messages)</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IOGP – <em>Geomatics Guidance Note 7, Coordinate Conversions and Transformations</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">EPSG Geodetic Parameter Dataset & Guidance Note 7-2.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">ISO 19111 – <em>Geographic Information — Referencing by Coordinates</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Carlson Software – <em>RTCM 1021–1027 White Paper</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Leica Geosystems – <em>Captivate Coordinate System Guide</em>.</span></span></li> </ul> ', 'images' => '20260625150050d64d8db365e7a0f663896871ecf242ce.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'RTK chuyển từ WGS84 sang VN-2000 như thế nào? Giải thích RTCM 1021–1027 và 7 tham số', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách RTK chuyển đổi từ WGS84 sang VN-2000, bản chất của RTCM 1021–1027, Bursa-Wolf Transformation, Helmert 7 tham số và vai trò của Site Calibration trong GNSS RTK.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '752', 'slug' => 'hieu-dung-ve-rtcm-1021-1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '555', 'rght' => '556', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '821', 'name' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân phổ biến và cách khắc phục!', 'code' => null, 'alias' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Với khả năng xác định tọa độ ở độ chính xác mức centimet, RTK đã trở thành công cụ gần như không thể thiếu đối với nhiều kỹ sư. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Trong điều kiện làm việc phù hợp và khi đạt trạng thái FIX, công nghệ RTK có thể cung cấp tọa độ với độ chính xác ở mức centimet. Chính vì vậy, RTK đã trở thành một trong những công cụ quan trọng đối với nhiều kỹ sư khảo sát và xây dựng. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy GPS RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.<br /> </em><br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>I. Trạng thái FIX trong RTK là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công nghệ GNSS RTK, trạng thái FIX (Fixed Solution) là khi bộ thu đã giải được số nguyên chu kỳ sóng mang (<em>Integer Ambiguity</em>). Khi đó, hệ thống có thể xác định tọa độ với độ chính xác ở mức centimet trong điều kiện làm việc phù hợp.<br /> <br /> Thông thường, máy RTK sẽ hiển thị một trong các trạng thái sau:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Single: Định vị độc lập bằng tín hiệu vệ tinh, sai số thường ở mức vài mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DGPS/SBAS: Có dữ liệu hiệu chỉnh, độ chính xác được cải thiện so với Single nhưng chưa đạt mức RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Float: Đã nhận dữ liệu cải chính nhưng chưa giải được hoàn toàn số nguyên chu kỳ sóng mang.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX: Định vị RTK với độ chính xác cao, đáp ứng phần lớn yêu cầu của công tác trắc địa.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lưu ý rằng, trạng thái FIX không đồng nghĩa với việc kết quả luôn chính xác tuyệt đối. Độ tin cậy của phép đo còn phụ thuộc vào điều kiện quan sát vệ tinh, môi trường làm việc, cấu hình hệ tọa độ và việc kiểm tra chất lượng số liệu ngoài thực địa.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 3 FIX.png" style="width: 620px; height: 566px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Không đủ vệ tinh hoặc hình học vệ tinh không thuận lợi</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để đạt được nghiệm FIX, máy RTK cần quan sát đồng thời đủ số lượng vệ tinh với sự phân bố hợp lý trên bầu trời. Máy có thể khó FIX hoặc FIX chậm khi làm việc trong các môi trường như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần nhà cao tầng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hẻm sâu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khu vực có nhiều cây lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dưới mái che hoặc trong nhà xưởng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa hình núi đá che khuất bầu trời.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài số lượng vệ tinh, chỉ số PDOP (Position Dilution of Precision) cũng ảnh hưởng đáng kể đến khả năng FIX. Dù quan sát được nhiều vệ tinh, nếu hình học vệ tinh không thuận lợi thì thời gian FIX vẫn có thể kéo dài hoặc nghiệm FIX kém ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 2 FIX.png" style="width: 600px; height: 400px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hiện tượng đa đường tín hiệu (Multipath)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đa đường tín hiệu là một trong những nguyên nhân phổ biến khiến máy RTK khó giữ FIX. Hiện tượng này xảy ra khi tín hiệu GNSS bị phản xạ qua các bề mặt như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tường kính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhà thép tiền chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xe ô tô hoặc container.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặt nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hàng rào thép.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi bộ thu nhận đồng thời tín hiệu trực tiếp và tín hiệu phản xạ, việc xác định pha sóng mang trở nên khó khăn hơn, khiến nghiệm RTK thiếu ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 5 FIX.png" style="width: 620px; height: 348px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Khoảng cách giữa Base và Rover quá lớn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong hệ thống RTK Base – Rover truyền thống, khoảng cách giữa hai máy ảnh hưởng trực tiếp đến chất lượng dữ liệu cải chính. Trong điều kiện các yếu tố khác tương đương, khoảng cách giữa Base và Rover càng lớn thì việc giải nghiệm RTK thường càng khó khăn hơn.<br /> <br /> Khi khoảng cách tăng lên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số tầng điện ly và tầng đối lưu giữa hai điểm tăng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mức độ tương quan của tín hiệu giảm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian FIX có thể lâu hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giữ FIX giảm trong điều kiện khó.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK Network sử dụng CORS (VRS, iMAX hoặc Single Base), người dùng thường không làm việc với một trạm Base duy nhất. Khả năng FIX còn phụ thuộc vào mật độ mạng CORS, thuật toán xử lý của hệ thống và điều kiện quan sát vệ tinh.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 4 FIX.png" style="width: 620px; height: 410px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Kết nối Internet hoặc dữ liệu cải chính không ổn định</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi sử dụng RTK Network thông qua NTRIP, dữ liệu RTCM phải được truyền liên tục từ máy chủ CORS đến Rover. Một số nguyên nhân thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sóng 4G/5G yếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Wi-Fi không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Server CORS bị gián đoạn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Age of Differential tăng cao.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, dữ liệu cải chính có thể bị trễ hoặc gián đoạn. Tùy từng hãng và từng dòng máy, một số thiết bị có thể duy trì nghiệm FIX trong thời gian ngắn nhờ các tính năng như RTK Hold, RTK Keep hoặc các cơ chế tương tự. Tuy nhiên, nếu việc gián đoạn kéo dài, máy thường sẽ chuyển sang FLOAT hoặc SINGLE.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Nhiễu điện từ và nhiễu vô tuyến</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS từ vệ tinh có công suất rất nhỏ khi đến mặt đất nên dễ bị ảnh hưởng bởi các nguồn nhiễu mạnh. Một số nguồn nhiễu thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạm BTS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radar.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường dây điện cao thế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy phát sóng công suất lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống radio công nghiệp.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK sử dụng Radio UHF, nhiễu vô tuyến còn có thể làm giảm chất lượng liên lạc giữa Base và Rover.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 6 FIX.png" style="width: 620px; height: 411px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Anten GNSS bị che khuất hoặc lắp đặt chưa phù hợp</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng thu tín hiệu của máy RTK phụ thuộc rất nhiều vào vị trí đặt anten. Một số tình huống có thể làm giảm chất lượng tín hiệu gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đứng quá sát tường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt gần xe ô tô.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần mái tôn hoặc kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten bị che bởi người đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cáp hoặc anten bị hư hỏng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lựa chọn vị trí đặt máy thông thoáng luôn là một trong những giải pháp đơn giản nhưng mang lại hiệu quả cao.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Điều kiện khí quyển và hoạt động không gian</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS chịu ảnh hưởng của tầng điện ly và tầng đối lưu. Trong các thời điểm như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bão từ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Kp cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động điện ly mạnh.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">khả năng FIX có thể giảm so với điều kiện bình thường. Trong đa số trường hợp, mưa nhỏ không phải là nguyên nhân chính gây mất FIX.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 1 FIX.png" style="width: 620px; height: 413px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Firmware hoặc cấu hình máy chưa phù hợp<br /> </span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các bản cập nhật firmware mới có thể:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cải thiện thuật toán RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thêm tín hiệu GNSS mới.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khắc phục các lỗi đã được nhà sản xuất ghi nhận.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng khả năng tương thích với các chuẩn RTCM.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, một số cấu hình chưa phù hợp cũng có thể ảnh hưởng đến khả năng FIX, chẳng hạn như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ bật một số hệ vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập góc cắt vệ tinh chưa hợp lý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai thông số truyền Radio giữa Base và Rover.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Người dùng nên cập nhật firmware theo khuyến nghị của nhà sản xuất và kiểm tra lại cấu hình trước khi làm việc ngoài hiện trường.</span></span><br /> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">9. Hiệu năng của từng dòng máy RTK</span></h3> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Không phải mọi bộ thu GNSS RTK đều có khả năng làm việc giống nhau. Hiệu năng của thiết bị phụ thuộc vào nhiều yếu tố như:</span></span><br /> <br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thiết kế anten GNSS.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Chip xử lý tín hiệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thuật toán RTK.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Khả năng chống đa đường.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Tốc độ xử lý dữ liệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Mức độ tối ưu của phần mềm điều khiển.</span></span></li> </ul> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Vì vậy, ngay cả khi làm việc trong cùng điều kiện hiện trường, tốc độ FIX và khả năng giữ FIX giữa các dòng máy cũng có thể khác nhau.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10. Máy vẫn FIX nhưng tọa độ bị sai</span></span></h3> <h3> </h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi thường bị nhầm với hiện tượng "không FIX". Trong nhiều trường hợp, máy vẫn báo FIX bình thường nhưng tọa độ sai đáng kể do:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai tham số chuyển đổi.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp tình huống này, cần kiểm tra lại cấu hình hệ quy chiếu trước khi nghi ngờ chất lượng tín hiệu GNSS.</span></span><br /> <p style="text-align: center;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/Esurvey.jpg" style="width: 620px; height: 324px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Làm thế nào để cải thiện khả năng FIX?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để nâng cao khả năng FIX khi đo RTK, người dùng nên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đo thông thoáng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế làm việc gần các bề mặt phản xạ mạnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra số lượng vệ tinh và chỉ số PDOP.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo kết nối Internet hoặc Radio ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi chỉ số Age of Differential.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra đúng cấu hình hệ tọa độ trước khi đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cập nhật firmware theo khuyến nghị của nhà sản xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra định kỳ anten và phụ kiện.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm trên các điểm khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ dựa vào trạng thái FIX, nên kiểm tra trên mốc khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác. <br /> <br /> >>> Máy GPS RTK không phải lúc nào cũng đạt trạng thái FIX ngay sau khi khởi động. Khả năng FIX phụ thuộc vào nhiều yếu tố như điều kiện quan sát vệ tinh, hiện tượng đa đường, chất lượng dữ liệu cải chính, kết nối Internet hoặc Radio, điều kiện khí quyển, cấu hình thiết bị và môi trường làm việc.<br /> <br /> Trong thực tế, trạng thái FIX là điều kiện cần nhưng chưa phải điều kiện đủ để khẳng định chất lượng kết quả đo. Bên cạnh việc theo dõi trạng thái FIX, người sử dụng vẫn nên kết hợp kiểm tra trên mốc khống chế, đo lặp các điểm quan trọng và đánh giá điều kiện hiện trường nhằm đảm bảo độ tin cậy của số liệu.<br /> <br /> Hiểu rõ các nguyên nhân trên sẽ giúp kỹ sư trắc địa xử lý nhanh các tình huống ngoài thực địa, lựa chọn phương án đo phù hợp và khai thác hiệu quả hơn công nghệ GNSS RTK.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/TRẮC ĐỊA THÀNH ĐẠT (Logo) (Ảnh bìa Facebook).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 300px;" /></p> <br /> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ ngay </span><a href="https://zalo.me/0949322456" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><span style="margin: 0px; padding: 0px; color: rgb(255, 102, 0);"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt qua Zalo</strong></span></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để được tư vấn chọn máy phù hợp nhất!</span>', 'images' => '20260625110358e00121db9ef2b0248aadce5ad04f0e9d.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân và cách khắc phục', 'meta_key' => '', 'meta_des' => 'Máy GPS RTK không FIX được hoặc thường xuyên chuyển giữa FIX và FLOAT? Tìm hiểu 10 nguyên nhân phổ biến như vệ tinh, CORS, Internet, Base, nhiễu tín hiệu và cách khắc phục hiệu quả.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '537', 'slug' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '553', 'rght' => '554', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '820', 'name' => 'AI trong ngành trắc địa: Công việc nào sẽ được tự động hóa trước?', 'code' => null, 'alias' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span><o:p></o:p></p> <p data-end="686" data-start="526"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang dần xuất hiện trong nhiều công đoạn của quy trình khảo sát và thành lập bản đồ.</span></span><o:p></o:p></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span></em><br /> <br /> <o:p></o:p></p> <p data-end="686" data-start="526"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, phân loại dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang giúp giảm đáng kể thời gian xử lý dữ liệu và hỗ trợ kỹ sư đưa ra quyết định nhanh hơn. Tuy nhiên, một câu hỏi được nhiều người quan tâm là: </span></span></em><em style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Công việc nào trong ngành trắc địa sẽ được AI tự động hóa trước?</strong></em></p> <p style="text-align: center;"> </p> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and BIM 2.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 450px; height: 299px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong quá trình khảo sát và thành lập bản đồ, khối lượng dữ liệu thu thập được ngày càng lớn. Một chuyến bay UAV có thể tạo ra hàng nghìn ảnh chụp.<br /> <br /> Một dự án LiDAR có thể tạo ra hàng triệu đến hàng tỷ điểm Point Cloud. <br /> <br /> Các hệ thống quan trắc hiện đại có thể ghi nhận dữ liệu liên tục 24/7.<br /> <br /> Khối lượng dữ liệu này vượt xa khả năng xử lý thủ công của con người. Đây chính là môi trường lý tưởng để AI phát huy hiệu quả. Theo nhiều nghiên cứu gần đây, AI đặc biệt phù hợp với các nhiệm vụ nhận dạng mẫu, phân loại dữ liệu, phát hiện bất thường và tự động hóa các quy trình xử lý lặp lại.</span></span><br /> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">A. AI đang được ứng dụng như thế nào trong trắc địa?</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Xử lý dữ liệu UAV và ảnh viễn thám</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lĩnh vực phát triển nhanh nhất hiện nay. AI có thể hỗ trợ:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng nhà cửa, đường giao thông và cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động phân loại lớp phủ bề mặt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện thay đổi địa hình qua nhiều thời điểm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thành lập bản đồ hiện trạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều nghiên cứu đã chứng minh AI có khả năng tự động nhận dạng và trích xuất đối tượng từ ảnh UAV với độ chính xác cao, giúp giảm đáng kể khối lượng công việc số hóa thủ công.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and UAV.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Xử lý Point Cloud và LiDAR</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong các dự án quét laser mặt đất hoặc UAV LiDAR, việc phân loại Point Cloud thường tiêu tốn rất nhiều thời gian.<br /> AI hiện có thể:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tách điểm mặt đất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng công trình xây dựng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo mô hình 3D bán tự động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số hệ thống hiện nay còn có khả năng xử lý dữ liệu LiDAR gần như theo thời gian thực và tự động phân loại địa vật với mức can thiệp thủ công rất thấp.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and Lidar.jpg" style="width: 500px; height: 333px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Thành lập và cập nhật bản đồ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong lĩnh vực GIS và bản đồ, AI đang được ứng dụng để:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động số hóa đối tượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất ranh giới địa vật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lỗi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện các bất thường về hình học và thuộc tính.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các nghiên cứu về bản đồ địa chính và bản đồ nền cho thấy AI có tiềm năng rút ngắn đáng kể thời gian thành lập và cập nhật dữ liệu bản đồ.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and Mapping(1).jpg" style="width: 600px; height: 300px;" /></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Quan trắc công trình và giám sát biến dạng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các công trình cầu, đập, nhà cao tầng hoặc mỏ khai thác, dữ liệu quan trắc thường được thu thập liên tục trong thời gian dài AI có thể giúp:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện số liệu bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi xu hướng chuyển vị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự báo nguy cơ lún hoặc nghiêng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ cảnh báo sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây được xem là một trong những hướng ứng dụng có tiềm năng lớn vì AI rất giỏi trong việc phát hiện các quy luật ẩn trong tập dữ liệu dài hạn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and monitoring.jpg" style="width: 600px; height: 335px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Công việc văn phòng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu phải lựa chọn một nhóm công việc có khả năng được AI tự động hóa trước trong ngành trắc địa, thì đó có lẽ là các công việc văn phòng mang tính lặp lại và xử lý dữ liệu. Các công việc như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu giữa các định dạng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tổng hợp số liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra các lỗi dữ liệu đơn giản.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu, bảng biểu và báo cáo kỹ thuật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất thông tin từ nhật ký hoặc sổ đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại và sắp xếp dữ liệu dự án.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những công việc có quy trình tương đối rõ ràng và ít phụ thuộc vào đánh giá chuyên môn của kỹ sư. Trên thực tế, nhiều phần mềm hiện nay đã bắt đầu tích hợp các tính năng tự động hóa dạng này. AI chỉ đang giúp các quy trình đó trở nên thông minh và hiệu quả hơn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ai and office.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">B. Công việc nào khó bị AI thay thế?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực tế hiện nay, đây có lẽ là nhóm ứng dụng AI gần gũi nhất với nhiều kỹ sư trắc địa. Thay vì mất hàng giờ để viết các công cụ Excel, Python hoặc VBA, nhiều kỹ sư đã bắt đầu sử dụng AI để hỗ trợ:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Viết chương trình chuyển đổi tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán stakeout tim tuyến, cọc khoan nhồi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra dữ liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển ảnh sổ đo thành bảng tính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu nghiệm thu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Soạn thảo báo cáo kỹ thuật.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AI không thực hiện thay công việc chuyên môn, nhưng có thể giúp rút ngắn đáng kể thời gian xử lý các công việc lặp lại.<br /> <br /> >>> Nếu GNSS giúp người làm trắc địa đo nhanh hơn, UAV giúp thu thập dữ liệu nhanh hơn thì AI có thể giúp xử lý dữ liệu nhanh hơn.</span></span> <p data-end="2115" data-start="1963"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong tương lai gần, lợi thế có thể không nằm ở việc ai sử dụng AI hay không, mà nằm ở việc ai biết khai thác AI hiệu quả hơn trong công việc hàng ngày. </span></span><br /> <br /> <strong><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="text-align: justify; margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span></strong></p> ', 'images' => '20260617172058d2979529aed88d220bef4d1f33c5f441.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'AI trong trắc địa: Công việc nào sẽ được tự động hóa trước?', 'meta_key' => '', 'meta_des' => 'AI đang được ứng dụng ngày càng nhiều trong ngành trắc địa, từ xử lý UAV, LiDAR, bản đồ đến lập báo cáo kỹ thuật. Vậy công việc nào sẽ được AI tự động hóa trước? Tìm hiểu trong bài viết này.', 'created' => '2026-06-17', 'modified' => '2026-07-11', 'status' => '1', 'view' => '670', 'slug' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '551', 'rght' => '552', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '819', 'name' => 'BIM và LiDAR đang dùng những định dạng dữ liệu nào? Giải thích IFC, RVT, NWD, LAS, LAZ từ A-Z', 'code' => null, 'alias' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.</span></span><br /> ', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.<br /> <br /> Vậy các định dạng này dùng để làm gì và khác nhau như thế nào?</em></span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Nhóm dữ liệu BIM</span></span></h2> <br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 IFC (Industry Foundation Classes)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC là định dạng trao đổi dữ liệu BIM mở được phát triển bởi buildingSMART. Mục đích chính của IFC là cho phép các phần mềm BIM khác nhau trao đổi mô hình với nhau mà không phụ thuộc vào một hãng phần mềm cụ thể.</span></span><br /> <br /> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>- Ưu điểm:</strong> Không phụ thuộc vào một nhà cung cấp phần mềm cụ thể, hỗ trợ phối hợp giữa nhiều bộ môn và phù hợp cho việc bàn giao, lưu trữ dữ liệu dự án trong thời gian dài.</span></span><br /> <br /> <o:p></o:p></p> <p data-end="608" data-start="295"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="307" data-start="295">- Hạn chế:</strong> Không phải phần mềm BIM nào cũng hỗ trợ đầy đủ mọi tính năng của IFC. Trong một số trường hợp, các tham số đối tượng, Family phức tạp hoặc dữ liệu chuyên biệt có thể bị mất hoặc thay đổi khi chuyển đổi. Ngoài ra, khả năng tương thích còn phụ thuộc vào phiên bản IFC sử dụng (IFC2x3, IFC4, IFC4.3...).</span></span><br /> <br /> <o:p></o:p></p> <p data-end="858" data-start="613"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="634" data-start="613">- Ứng dụng thực tế:</strong> IFC thường được sử dụng để trao đổi dữ liệu giữa các bộ môn, bàn giao mô hình BIM cho chủ đầu tư và lưu trữ dữ liệu dự án theo định dạng mở (vendor-neutral), giúp giảm sự phụ thuộc vào một phần mềm hoặc nhà cung cấp cụ thể.</span></span><o:p></o:p></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Autodesk Revit, Tekla Structures, Archicad, Bentley OpenBuildings đều có thể xuất hoặc nhập file IFC nên IFC thường được xem là "ngôn ngữ chung" của BIM.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 BCF (BIM Collaboration Format)</span></span></h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">BCF được sử dụng để trao đổi các vấn đề (Issue), bình luận (Comment), góc nhìn (Viewpoint) và vị trí cần xử lý trong mô hình BIM. BCF không chứa mô hình 3D mà chỉ lưu thông tin phục vụ quá trình phối hợp giữa các bên.</span> <p> <br /> <strong data-end="337" data-start="325" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Dung lượng nhỏ, dễ chia sẻ và tích hợp với nhiều nền tảng BIM như Autodesk Construction Cloud (BIM 360), Solibri, Tekla BIMsight và các hệ thống quản lý Issue khác. BCF đặc biệt hữu ích trong các cuộc họp phối hợp (Coordination Meeting), kiểm tra va chạm (Clash Detection) và quy trình QA/QC.</span></p> <p data-end="630" data-start="325"> <br /> <strong data-end="653" data-start="635" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Lưu ý thực tế:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> BCF thường được sử dụng kèm với các file mô hình như IFC, RVT hoặc NWD để người dùng có thể xem đầy đủ bối cảnh của vấn đề. Một ưu điểm quan trọng của BCF là khả năng theo dõi lịch sử xử lý (Traceability), giúp liên kết giữa vấn đề được phát hiện, người phụ trách và các thay đổi được thực hiện trong dự án.</span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 RVT</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RVT là định dạng dự án của Autodesk Revit. Một file RVT có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiến trúc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống MEP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số vật liệu</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng BIM được sử dụng rất phổ biến hiện nay.</span></span><br /> <br /> <p data-end="355" data-start="108"> <strong data-end="372" data-start="360" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Lưu giữ đầy đủ tham số đối tượng, lịch sử làm việc, Worksharing và các thông tin thiết kế chi tiết. RVT là định dạng mang lại khả năng làm việc đầy đủ nhất trong môi trường Revit.</span></p> <p data-end="552" data-start="360"> </p> <p data-end="808" data-start="557"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="569" data-start="557">Hạn chế:</strong> RVT là định dạng độc quyền (proprietary) của Autodesk. Các phần mềm BIM khác thường không thể đọc hoặc khai thác đầy đủ toàn bộ thông tin trong file RVT. Vì vậy, khi cần phối hợp đa nền tảng, người dùng thường phải xuất sang IFC hoặc NWD.</span></span><br /> </p> <p data-end="1161" data-start="813"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="831" data-start="813">Lưu ý thực tế:</strong> RVT thường được sử dụng trong nội bộ đơn vị thiết kế hoặc giữa các bên cùng sử dụng Revit. Khi cần trao đổi dữ liệu với chủ đầu tư, nhà thầu hoặc các đơn vị sử dụng phần mềm khác, IFC thường là lựa chọn phổ biến để bàn giao mô hình BIM, trong khi NWD thường được sử dụng cho công tác phối hợp và kiểm tra mô hình trên Navisworks.</span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 RFA</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA là định dạng Family của Revit. Family có thể hiểu là thư viện các đối tượng BIM như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa sổ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị điện</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị cơ điện</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA tương tự như Block trong AutoCAD nhưng có nhiều thông tin tham số hơn.<br /> <br /> <strong>Ưu điểm</strong>: RFA cho phép mô tả đối tượng bằng các tham số chi tiết như kích thước, vật liệu, mã thiết bị và thông tin kỹ thuật. Nhờ đó, các đối tượng có thể dễ dàng tái sử dụng giữa nhiều dự án khác nhau, đồng thời giúp chuẩn hóa dữ liệu BIM trong doanh nghiệp.<br /> <br /> <strong>Hạn chế</strong>: RFA là định dạng riêng của Revit nên chủ yếu hoạt động trong hệ sinh thái Autodesk. Khi xuất sang IFC, các Family phức tạp có thể bị đơn giản hóa hoặc mất một phần tham số do sự khác biệt giữa các chuẩn dữ liệu BIM.<br /> <br /> <strong>Lưu ý</strong>: Nên tiêu chuẩn hóa thư viện Family trước khi triển khai dự án hoặc bàn giao dữ liệu. Đối với các Family quan trọng, cần quản lý phiên bản (Version Control) và tài liệu hóa các tham số chính để đảm bảo tính nhất quán giữa các bộ môn và các giai đoạn của dự án.</span></span><br /> <br /> <h3> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.5 RTE</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTE là định dạng Template của Revit. Đây là file mẫu được sử dụng khi khởi tạo dự án mới nhằm đảm bảo tiêu chuẩn hóa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Family</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy ước đặt tên</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số dự án</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/BIM 2(1).jpg" style="width: 662px; height: 463px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Nhóm dữ liệu Navisworks</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 NWD</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD là định dạng mô hình tổng hợp của Autodesk Navisworks. File NWD có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều mô hình BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Clash Detection</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Markup</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu phối hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng thường được sử dụng trong các cuộc họp BIM hoặc bàn giao mô hình.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 NWC</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWC là định dạng trung gian của Navisworks. File NWC thường nhẹ hơn NWD và được sử dụng để tăng tốc quá trình nạp mô hình.<br /> Nhiều dự án BIM sử dụng NWC làm định dạng trao đổi nội bộ giữa các bộ môn.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.3 NWV</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWV là định dạng Viewpoint của Navisworks. Nó lưu các thông tin về:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái hiển thị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thiết lập quan sát mô hình</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với NWD hoặc NWC, NWV ít được sử dụng hơn.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Navisworks.jpg" style="width: 680px; height: 392px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Nhóm dữ liệu Point Cloud</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 LAS (LASer File Format)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS là định dạng tiêu chuẩn lưu trữ dữ liệu Point Cloud từ công nghệ LiDAR. Mỗi điểm trong file LAS có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Intensity</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GPS Time</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Classification</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Màu RGB</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS thường được tạo ra từ: UAV LiDAR; Mobile Mapping; SLAM Scanner; Máy quét laser mặt đất (TLS); LiDAR hàng không. Một file LAS có thể chứa từ hàng triệu đến hàng trăm triệu điểm.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 LAZ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAZ là phiên bản nén của LAS. Tương tự như DXF, DWG; ZIP và thư mục dữ liệu. <br /> <br /> LAZ giúp giảm đáng kể dung lượng lưu trữ nhưng vẫn giữ nguyên thông tin Point Cloud. Hiện nay phần lớn các dự án LiDAR đều sử dụng LAZ để tối ưu dung lượng và tốc độ truyền dữ liệu.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lidar format.jpg" style="width: 565px; height: 353px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. So sánh nhanh các nhóm dữ liệu</span></span></h2> <br /> <table border="1" cellpadding="0" cellspacing="3" style="width: 100%"> <tbody> <tr> <td style="width: 128px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nhóm dữ liệu</strong></span></span></td> <td style="width: 160px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Định dạng phổ biến</strong></span></span></td> <td style="width: 212px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Mục đích</strong></span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ điểm</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý điểm đo, stakeout</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CAD</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF, DWG</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Bản vẽ kỹ thuật 2D/3D</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">BIM</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC, RVT, RFA, RTE, BCF</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình công trình số</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Navisworks</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD, NWC, NWV</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Phối hợp và kiểm tra mô hình</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Cloud</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS, LAZ</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu quét laser và LiDAR</span></span></td> </tr> </tbody> </table> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Sự phát triển của BIM, UAV LiDAR và công nghệ quét laser 3D đang làm thay đổi cách dữ liệu được tạo ra và sử dụng trong ngành xây dựng.<br /> <br /> Nếu CSV và DXF vẫn là những định dạng quen thuộc đối với kỹ sư đo đạc thì IFC, RVT, NWD hay LAS đang trở thành những định dạng ngày càng phổ biến trong các dự án hiện đại.<br /> <br /> Việc hiểu được chức năng của từng loại dữ liệu sẽ giúp kỹ sư lựa chọn đúng định dạng, trao đổi thông tin hiệu quả hơn và tránh nhiều sai sót trong quá trình triển khai dự án.</span></span><br /> <br /> <h2 data-end="2546" data-start="2275" id="lien-he-trac-dia-thanh-dat-de-duoc-tu-van-giai-phap-phu-hop-voi-tung-loai-cong-trinh" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span><br /> <br /> <span style="display: none;"> </span><span style="display: none;"> </span><img alt="" src="/admin/webroot/upload/image/images/bim 5.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; color: rgb(34, 34, 34); width: 678px; height: 452px;" /><span style="display: none;"> </span><span style="display: none;"> </span></h2> <p> </p> ', 'images' => '2026061315274748a34b386d28d2887f07eb97a60c9540.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Ngoài CSV và DXF: Tìm hiểu các định dạng IFC, RVT, NWD, LAS trong BIM và quét laser 3D', 'meta_key' => '', 'meta_des' => 'iFC, RVT, NWD, LAS, LAZ là gì? Tìm hiểu các định dạng dữ liệu BIM, Navisworks và Point Cloud phổ biến trong xây dựng, đo đạc, UAV LiDAR và quét laser 3D.', 'created' => '2026-06-13', 'modified' => '2026-07-12', 'status' => '1', 'view' => '810', 'slug' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '549', 'rght' => '550', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '818', 'name' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'code' => null, 'alias' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></p> <p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></em></p> <p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></em></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Từ cuộc đua vệ tinh đến cuộc đua trải nghiệm ngoài thực địa</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng 10 năm trước, khi một hãng giới thiệu thế hệ máy GNSS RTK mới, những thông số thường được nhắc đến nhiều nhất là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi được bao nhiêu kênh vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ những hệ thống GNSS nào.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX nhanh hơn bao nhiêu giây.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao hơn bao nhiêu milimet.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời điểm đó, đây thực sự là những yếu tố tạo nên sự khác biệt giữa các sản phẩm trên thị trường. Các hãng liên tục nâng số lượng kênh từ vài trăm lên hàng nghìn kênh. Những hệ thống mới như Galileo, BeiDou hay QZSS lần lượt được bổ sung. Công nghệ xử lý tín hiệu cũng ngày càng hoàn thiện.<br /> <br /> Tuy nhiên, khi nhìn vào thị trường hiện nay, có thể thấy cuộc đua đó đang dần thay đổi. Hầu hết các dòng RTK hiện đại đều đã hỗ trợ đa hệ vệ tinh, đa tần số và có khả năng đạt độ chính xác centimet trong điều kiện làm việc bình thường. Khi khoảng cách công nghệ về phần cứng GNSS ngày càng thu hẹp, các hãng bắt đầu tìm kiếm một hướng đi mới - Đó là nâng cao trải nghiệm làm việc ngoài thực địa.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Điều mà kỹ sư đo đạc thực sự quan tâm là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với người sử dụng máy RTK ngoài công trường, câu hỏi quan trọng nhất thường không phải: "Máy này theo dõi được bao nhiêu vệ tinh?" mà là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi hoàn thành công việc nhanh hơn không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi đo được những vị trí khó không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm được thời gian đi lại ngoài hiện trường không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm số lượng thiết bị phải mang theo không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp công việc an toàn hơn không?</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây chính là lý do nhiều công nghệ mới xuất hiện trong vài năm gần đây.<br /> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. IMU – Bước thay đổi đầu tiên</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một trong những cải tiến có ảnh hưởng lớn nhất là công nghệ IMU. Trước đây, việc giữ sào GNSS thẳng đứng gần như là yêu cầu bắt buộc.<br /> Những vị trí như: chân tường, góc công trình, mép hàng rào hay khu vực cây cối thường gây khó khăn cho người đo. Nhưng IMU đã thay đổi hoàn toàn cách làm việc này. Người sử dụng có thể nghiêng sào trong một phạm vi nhất định mà vẫn duy trì được độ chính xác cao.<br /> <br /> Ngày nay, bù nghiêng gần như đã trở thành tính năng tiêu chuẩn trên các dòng RTK mới.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (1).png" style="width: 680px; height: 383px;" /></span></span></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Camera – Khi RTK bắt đầu "nhìn thấy" hiện trường</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau IMU, các hãng tiếp tục đưa camera lên Rover GNSS. Ban đầu, nhiều người cho rằng đây chỉ là một tính năng mang tính trình diễn công nghệ.<br /> Tuy nhiên, thực tế camera đã mở ra nhiều ứng dụng mới:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhận hiện trạng công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo điểm từ ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout bằng thực tế tăng cường (AR).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại dữ liệu sau khi khảo sát.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này giúp RTK không chỉ cung cấp tọa độ mà còn lưu giữ được bối cảnh thực tế của hiện trường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (2).png" style="width: 680px; height: 678px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Laser Survey – Xu hướng đáng chú ý nhất hiện nay</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu IMU giúp người dùng đo nghiêng và camera giúp ghi nhận hình ảnh, thì Laser Survey đang hướng tới một mục tiêu khác. Đó là đo được những vị trí mà trước đây Rover GNSS khó hoặc không thể tiếp cận.<br /> Hãy hình dung một số tình huống quen thuộc mà anh em có thể gặp khi trực tiếp đo ngoài công trình: <br /> - Mép taluy cao.<br /> - Hồ điều hòa.<br /> - Bờ kênh.<br /> - Hố đào sâu.<br /> - Mái nhà.<br /> - Tường chắn.<br /> - Khu vực đang thi công nguy hiểm.<br /> <br /> Với RTK truyền thống, muốn lấy tọa độ chính xác, người đo thường phải đưa sào đến tận vị trí cần đo. Điều này không phải lúc nào cũng thuận lợi hoặc an toàn. Laser Survey ra đời để giải quyết vấn đề đó. Thay vì đưa anten GNSS đến điểm đo, người sử dụng chỉ cần hướng tia laser đến mục tiêu. Phần mềm sẽ kết hợp dữ liệu từ GNSS, IMU và laser để tính toán tọa độ của điểm cần khảo sát.</span></span><br /> <p data-end="1209" data-start="1006"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tất nhiên, việc đo các vị trí khó tiếp cận bằng tia laser không phải là điều hoàn toàn mới trong ngành đo đạc. Máy toàn đạc điện tử đã sử dụng công nghệ đo không gương (Reflectorless) từ nhiều năm trước. Điểm khác biệt là Laser Survey đang đưa khả năng này lên nền tảng Rover GNSS, cho phép người dùng vừa khai thác ưu thế định vị vệ tinh ngoài hiện trường, vừa thực hiện các phép đo từ xa trong những tình huống mà trước đây thường phải kết hợp thêm máy toàn đạc hoặc các thiết bị khác.</span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lý do nhiều chuyên gia nhận định rằng Laser Survey có thể là một trong những bước phát triển đáng chú ý nhất của Rover GNSS trong những năm gần đây.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/i85-gnss-imu-dual-cameras-laser-land-surveying.jpg" style="width: 472px; height: 354px;" /></span></span></p> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>6. Vì sao các hãng TQ đầu tư mạnh vào hướng đi này?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một lý do quan trọng là thị trường đã thay đổi. Trước đây, người mua thường so sánh:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu kênh vệ tinh?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu tần số?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác bao nhiêu milimet?</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngày nay, người dùng bắt đầu quan tâm nhiều hơn đến các yếu tố như:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Năng suất làm việc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trải nghiệm sử dụng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính linh hoạt ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giải quyết các tình huống thực tế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này khiến các hãng phải chuyển hướng nghiên cứu: không chỉ phát triển bộ thu GNSS tốt hơn, mà còn phải tìm cách giúp người dùng làm việc hiệu quả hơn.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>7. RTK đang dần trở thành nền tảng tích hợp cảm biến</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu quan sát sự phát triển của các thế hệ RTK gần đây, có thể thấy một xu hướng rất rõ. RTK không còn đơn thuần là thiết bị thu tín hiệu vệ tinh mà nó đang trở thành một nền tảng tích hợp nhiều cảm biến:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IMU.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Laser.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công nghệ xử lý hình ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thuật toán tự động hóa và trí tuệ nhân tạo (AI).</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi công nghệ đều nhằm giải quyết một khó khăn cụ thể ngoài công trường.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image(1).png" style="width: 680px; height: 680px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Có thể nói, khi khả năng thu tín hiệu GNSS giữa các thế hệ thiết bị ngày càng tiệm cận nhau, cuộc cạnh tranh của các hãng đang dần chuyển sang một hướng mới: giúp kỹ sư hoàn thành công việc nhanh hơn, an toàn hơn và thuận tiện hơn ngoài thực địa.</span></span> <p data-end="2546" data-start="2275"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera, IMU và Laser Survey có thể chỉ là những bước khởi đầu cho xu hướng đó. Trong tương lai, GNSS RTK nhiều khả năng sẽ không chỉ là thiết bị định vị vệ tinh, mà sẽ trở thành một nền tảng tích hợp nhiều cảm biến phục vụ công tác khảo sát và thi công ngoài hiện trường. </span></span><br /> </p> <h2 data-end="2546" data-start="2275"> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt </strong></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">để được tư vấn và hỗ trợ tốt nhất!</span></h2> ', 'images' => '2026061214390046f6215956d7c46255d00263c715c9d4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng Trung Quốc chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'meta_key' => '', 'meta_des' => 'Khám phá xu hướng phát triển mới của các hãng GNSS RTK như CHCNAV, eSurvey và nhiều thương hiệu khác. Từ IMU, Camera đến Laser Survey, cuộc đua công nghệ đang chuyển từ phần cứng GNSS sang nâng cao trải nghiệm làm việc ngoài thực địa.', 'created' => '2026-06-12', 'modified' => '2026-07-11', 'status' => '1', 'view' => '778', 'slug' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '547', 'rght' => '548', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '817', 'name' => 'Định dạng file RTK: Hướng dẫn xuất, nhập và xử lý lỗi thường gặp trong đo đạc', 'code' => null, 'alias' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.</span></span>', 'content' => '<p> <em><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong thực tế, công việc đo đạc không kết thúc khi Rover báo FIX hoặc khi hoàn thành việc thu thập tọa độ ngoài hiện trường. Sau bước đo đạc, dữ liệu thường phải trải qua nhiều công đoạn như:</span></em><br /> </p> <ul> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển về văn phòng.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biên tập trên AutoCAD hoặc CASS.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý trên Civil 3D, Trimble Business Center (TBC), Leica Infinity.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra trên Google Earth.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển giao cho chủ đầu tư hoặc đơn vị thiết kế.</span></span></em></li> </ul> <br /> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ cần xuất sai định dạng hoặc thiếu dữ liệu, toàn bộ quy trình phía sau có thể bị gián đoạn. Theo tài liệu của Trimble Business Center, hệ sinh thái khảo sát hiện nay hỗ trợ rất nhiều định dạng khác nhau như CSV, TXT, DXF, DWG, KML, SHP, XML, JOB, RINEX... phục vụ các mục đích sử dụng khác nhau.<br /> </span></span></em> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/61sq3Qk7zvL.jpg" style="width: 600px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Các định dạng file dữ liệu phổ biến ở máy RTK</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 CSV (*.csv)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV (Comma Separated Values) là định dạng được sử dụng nhiều nhất trong công tác đo đạc hiện nay. Thông thường file CSV có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số hiệu điểm (Point ID)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Code</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi chú</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ: </strong></u> Point,X,Y,H,Code<br /> P1,234567.123,1234567.456,15.234,COTDIEN</em><br /> <br /> <u><strong>Ưu điểm</strong></u></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở được bằng Excel.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dung lượng nhỏ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ gửi Email, Zalo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ nhập vào Civil 3D, AutoCAD, QGIS, TBC.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><u><strong>Nhược điểm</strong></u></span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có tiêu chuẩn cấu trúc thống nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hai file CSV có thể chứa các trường dữ liệu khác nhau.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Leica Captivate và CHCNAV LandStar, người dùng có thể tự định nghĩa cấu trúc CSV xuất ra bằng cách thêm hoặc bớt các trường dữ liệu cần thiết.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên.png" style="width: 480px; height: 480px;" /> </span></span></p> <p style="text-align: center;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ví dụ về File tọa độ mốc</span></span></em></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 TXT (*.txt)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">TXT là file dữ liệu dạng văn bản thuần và thường được sử dụng khi:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển dữ liệu giữa các phần mềm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập dữ liệu stakeout.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉnh sửa thủ công bằng Notepad hoặc Notepad++.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ưu điểm lớn nhất là khả năng tùy biến cấu trúc dữ liệu.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 DAT (*.dat)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT là định dạng quen thuộc với nhiều đơn vị thành lập bản đồ địa hình với nhiều ứng dụng như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CASS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập bản đồ địa hình.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại Việt Nam, DAT vẫn là định dạng được sử dụng rất nhiều trong công tác đo vẽ địa hình.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 DXF (*.dxf)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF là định dạng trao đổi dữ liệu CAD. Theo Leica Captivate, DXF được sử dụng để chuyển trực tiếp điểm, đường, layer và các đối tượng CAD giữa hiện trường và văn phòng.<br /> <br /> <strong><u>Ưu điểm</u></strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở trực tiếp trên AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không cần nhập tọa độ thủ công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giữ được nhiều thông tin bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5 KML (*.kml)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML là định dạng của Google Earth với nhiều ứng dụng như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra vị trí điểm ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối chiếu dữ liệu khảo sát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ nhanh vị trí công trình.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Trimble, KML/KMZ là một trong những định dạng phổ biến để trao đổi dữ liệu tọa độ địa lý 3D.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.6 SHP (*.shp)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP (Shapefile) là định dạng GIS được sử dụng trong:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">QGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ArcGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống quản lý dữ liệu không gian.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica Captivate còn cho phép xuất thêm các trường chất lượng điểm đo và thông tin tọa độ vào Shapefile.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7 XLS / XLSX</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số phần mềm cho phép xuất trực tiếp sang Excel với ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ chỉnh sửa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ lập bảng tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp cho hồ sơ hoàn công.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Khi nào nên chọn CSV, DAT, DXF hay SHP?</span></span></h2> <br /> <table border="0" cellpadding="0" style="width: 100%"> <tbody> <tr> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mục đích</span></span></strong><br /> </td> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng khuyến nghị</span></span></strong><br /> </td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gửi tọa độ cho chủ đầu tư</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, XLSX</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập AutoCAD</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT, DXF</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập Civil 3D</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Google Earth</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GIS</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout công trình</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ dữ liệu nhanh</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV</span></span></td> </tr> </tbody> </table> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/c64e8674de5294e51c9bd4133e27d964aede72fb_2_1024x516.png" style="width: 600px; height: 302px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Hướng dẫn xuất dữ liệu trên máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù giao diện giữa Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay Matesurvey (Geomate) có khác nhau nhưng quy trình cơ bản tương đối giống nhau với các bước như sau:<br /> <br /> - <strong>Bước 1</strong>: Mở Project hoặc Job cần xuất.<br /> <br /> - <strong>Bước 2</strong>: Kiểm tra danh sách điểm đã lưu.<br /> <br /> - <strong>Bước 3</strong>:Chọn Export Data.<br /> <br /> - <strong>Bước 4</strong>: Chọn định dạng: <em>CSV; ;TXT; DAT; DXF; KML ; SHP</em><br /> <br /> - <strong>Bước 5</strong>: Kiểm tra cấu trúc dữ liệu xuất. Một số phần mềm cho phép tùy chỉnh:<br /> <em>Point ID<br /> Easting<br /> Northing<br /> Elevation<br /> Code<br /> Rod Height<br /> Antenna Height<br /> PDOP<br /> Trạng thái FIX/FLOAT</em><br /> <br /> - <strong>Bước 6</strong>: Lưu file và kiểm tra lại trước khi gửi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Hướng dẫn nhập dữ liệu vào máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài việc xuất dữ liệu từ máy RTK, nhu cầu nhập dữ liệu vào máy để phục vụ công tác bố trí công trình (Stake Out), dẫn đường hoặc kiểm tra tọa độ cũng rất phổ biến. Hiện nay hầu hết các phần mềm đo đạc như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey), MateSurvey (Geomate) đều hỗ trợ nhập các định dạng phổ biến như:CSV (*.csv); TXT (*.txt); DXF (*.dxf). Trong đó CSV là định dạng được sử dụng nhiều nhất.<br /> <br /> <strong>- Bước 1: </strong>Chuẩn bị File dữ liệu<br /> Xuất dữ liệu từ:AutoCAD; Civil 3D; Excel; QGIS; TBC; Leica Infinityvề định dạng CSV hoặc TXT.<br /> <br /> <strong>- Bước 2: </strong>Chép File vào sổ tay<br /> Có thể thực hiện bằngcáp USB, bluetooth, Wi-Fi, đồng bộ Cloud (tùy thiết bị).<br /> <br /> <strong>- Bước 3: </strong>Nhập dữ liệu<br /> Project > Import > Chọn định dạng file > Chọn file cần nhập.<br /> <br /> <strong>- Bước 4: </strong>Khai báo cấu trúc dữ liệu<br /> Đây là bước quan trọng nhất.Người dùng cần khai báo chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Point ID</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Code</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Leica Captivate và Trimble Access, khi nhập dữ liệu cần kiểm tra chính xác thứ tự cột dữ liệu để tránh sai lệch tọa độ.<br /> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Những lỗi thường gặp khi nhập và xuất dữ liệu RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù việc xuất và nhập dữ liệu trên các phần mềm như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay MateSurvey (Geomate) tương đối đơn giản, nhưng thực tế ngoài công trường vẫn thường xuyên phát sinh các lỗi làm mất thời gian xử lý dữ liệu hoặc thậm chí ảnh hưởng đến kết quả thi công.<br /> Dưới đây là những lỗi phổ biến nhất.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.1 Xuất file thành công nhưng mở ra không có dữ liệu</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá nhiều người dùng RTK từng gặp với các biểu hiện như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File được tạo thành công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có tên dự án hoặc tiêu đề file.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có điểm tọa độ bên trong.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường gặp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Project hoặc Job.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Data File.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đang bật bộ lọc dữ liệu (Filter).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai loại điểm cần xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Database không chứa dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Kiểm tra lại Point Database.<br /> - Kiểm tra đúng Project đang làm việc.<br /> - Tắt các bộ lọc dữ liệu trước khi xuất.<br /> - Chọn xuất toàn bộ điểm (All Points).<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.2 File đuôi .CSV mở ra bằng excel nhưng hiển thị trống hoặc sai cột</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biểu hiện thường thấy:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File vẫn có dung lượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel mở được nhưng dữ liệu dồn vào một cột.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tưởng rằng file bị lỗi hoặc mất dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel đọc sai dấu phân cách dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File sử dụng dấu "," trong khi máy tính đang cấu hình dấu ";" hoặc ngược lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mã hóa ký tự (Encoding).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Mở thử bằng Notepad hoặc Notepad++.<br /> - Sử dụng chức năng Import Data / From Text trong Excel.<br /> - Kiểm tra lại dấu phân cách dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.3 CSV của người khác có nhiều cột hơn hoặc ít cột hơn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều người cho rằng CSV là định dạng cố định. Thực tế không phải vậy. Một file CSV có thể chỉ chứa:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point ID ( Số hiệu điểm)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting ( Tọa đọ X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing ( Tọa độ Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation ( Cao độ)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài các trường dữ liệu cơ bản như <strong>Số hiệu điểm, Tọa độ X, Tọa độ Y và Cao độ H</strong>, nhiều phần mềm RTK còn cho phép xuất thêm các thông tin như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mã điểm (Code)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao sào (Rod Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao ăng-ten (Antenna Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số PDOP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm (Fix Status)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc phương vị (Azimuth)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô tả hoặc ghi chú điểm (Description)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân là do cấu hình định dạng xuất dữ liệu của từng phần mềm hoặc từng đơn vị sử dụng. Đây không phải lỗi dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.4 Nhập dữ iệu thành công nhưng điểm nằm sai vị trí</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi nguy hiểm nhất vì rất khó phát hiện nếu không kiểm tra lại.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhầm thứ tự cột X và Y.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục VN-2000.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai đơn vị tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ:</strong></u><br /> Đúng: Point,X,Y,H<br /> P1,234567.123,1234567.456,10.123<br /> <br /> Sai: Point,Y,X,H<br /> P1,1234567.456,234567.123,10.123</em><br /> <br /> Kết quả là điểm có thể xuất hiện cách vị trí thực hàng chục hoặc hàng trăm kilomet.<br /> <br /> <strong>Cách xử lý:</strong><br /> - Kiểm tra lại cấu trúc file.<br /> - Kiểm tra đúng thứ tự Easting và Northing.<br /> - Kiểm tra hệ tọa độ công trình.<br /> - Đối chiếu với một điểm khống chế đã biết.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.5 Nhập dữ liệu thành công nhưng không nhìn thấy điểm</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lúc này máy báo nhập dữ liệu thành công, danh sách điểm vẫn có nhưng không nhìn thấy điểm trên bản đồ.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nằm ngoài phạm vi hiển thị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai Projection.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Zoom Extents.<br /> - Kiểm tra lại hệ tọa độ.<br /> - Kiểm tra lại Projection và KTT.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.6 Nhập dữ liệu định dạng DXF nhưng không hiển thị đối tượng</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lỗi này xảy ra do những nguyên nhân như:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer đang tắt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF không tương thích.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng nằm ngoài vùng hiển thị.</span></span></li> </ul> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cách xử lý:</span></span></strong><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Layer.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thử lưu lại DXF phiên bản thấp hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Zoom Extents để kiểm tra toàn bộ bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> CSV, TXT, DAT, DXF, KML hay SHP đều là những định dạng dữ liệu quan trọng trong công tác đo đạc hiện đại. Không có định dạng nào là "tốt nhất" cho mọi trường hợp. Lựa chọn đúng định dạng xuất dữ liệu sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thời gian xử lý văn phòng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế lỗi chuyển đổi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả phối hợp giữa khảo sát, thiết kế và thi công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm rủi ro mất dữ liệu hoặc bàn giao sai định dạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế hiện nay, CSV vẫn là định dạng phổ biến nhất nhờ tính linh hoạt, dễ sử dụng và khả năng tương thích với hầu hết các phần mềm đo đạc, CAD và GIS.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/588632958_1241954074621445_1455996422080404648_n.jpg" style="width: 747px; height: 420px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '2026060609425746cdab6ee8d08331f2369b4b04a4a4d5.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Định dạng file RTK: CSV, DAT, DXF, KML, SHP và Cách Xuất, Nhập Dữ Liệu', 'meta_key' => '', 'meta_des' => 'Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.', 'created' => '2026-06-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '877', 'slug' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '545', 'rght' => '546', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '816', 'name' => 'Sửa chữa máy thủy bình bị rơi, va đập – Nguyên nhân gây đo sai ngoài công trường', 'code' => null, 'alias' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-–-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> <br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy. Đây được xem như “trái tim” của máy thủy bình tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850337449414_cbf23e5b4edf679eed8636152be1bb10.jpg" style="width: 600px; height: 800px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cụm cân bằng tự động hoạt động theo nguyên lý trọng lực với hệ thống con lắc treo bằng dây cực nhỏ kết hợp cơ cấu giảm dao động từ tính để giữ tia ngắm luôn nằm ngang. Nhờ đó máy có thể tự cân bằng nhanh và cho độ chính xác cao ngoài công trường. Tuy nhiên, cấu tạo này cũng khá nhạy với va đập. Chỉ một cú rơi hoặc vận chuyển mạnh cũng có thể gây các lỗi như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Liệt rung cụm compensator.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhảy rung hoặc kẹt rung.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xoắn hoặc lệch dây treo con lắc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số cao độ tăng bất thường.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế sửa chữa, phần lớn các trường hợp máy thủy bình đo sai sau va đập đều liên quan trực tiếp đến cụm cân bằng tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850429563246_858468dda57655643001cdc5b7476042.jpg" style="width: 600px; height: 800px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Một số dấu hiệu nhận biết máy thủy bình bị sai sau va đập</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi máy thủy bình bị rơi, va đập hoặc vận chuyển mạnh, nếu xuất hiện các dấu hiệu dưới đây thì nên kiểm tra ngay cụm cân bằng tự động bên trong máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả chênh lệch bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng một vị trí nhưng đo nhiều lần ra số khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số rất lớn, thậm chí lệch đến hàng mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy vẫn đọc mia bình thường nhưng cao độ không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi lắc nhẹ máy không còn nghe tiếng rung “roong roong” êm như lúc mới mua.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, cụm con lắc bên trong đã bị:<br /> <br /> • Liệt rung<br /> • Kẹt rung<br /> • Xoắn dây treo<br /> • Hoặc mất khả năng cân bằng tự động<br /> <br /> Điều nguy hiểm là bên ngoài máy vẫn có thể hoạt động “có vẻ bình thường”, khiến người dùng khó phát hiện nếu không kiểm tra sai số trước khi thi công. Vì vậy, sau mỗi lần máy bị va đập, nên kiểm tra sai số góc i hoặc test đo đi – đo về trước khi tiếp tục sử dụng ngoài công trường.<br /> <br /> Khuyến nghị sau khi thiết bị bị va đập:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy và ốc cân bằng bằng cách quay máy 180° để quan sát độ dịch chuyển bọt thủy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai số góc i bằng phương pháp hai mia hoặc thử nghiệm đối chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không tiếp tục đo công trình khi chưa xác định chính xác tình trạng thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì chỉ một máy bị lệch cũng có thể truyền sai số cho toàn bộ số liệu ngoài công trường.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (6).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 420px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Qui trình sửa chữa máy thủy bình tại Trắc địa Thành Đạt</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bước 1: Tiếp nhận và kiểm tra tổng thể thiết bị.<br /> Bước 2: Kiểm tra cụm treo con lắc và cụm cân bằng tự động.<br /> Bước 3: Báo lỗi, báo giá sửa chữa và hiệu chỉnh.<br /> Bước 4: Cân chỉnh cụm compensator — công đoạn quan trọng nhất.<br /> Bước 5: Hiệu chỉnh sai số góc i.<br /> Bước 6: Kiểm tra thực địa sau sửa chữa.<br /> Bước 7: Dán tem kiểm nghiệm trước khi bàn giao cho khách hàng.<br /> <br /> Một máy thủy bình bị lệch không chỉ làm sai một điểm đo… mà có thể truyền sai số cho toàn bộ tuyến hoặc số liệu ngoài công trường.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Q&A - Kiểm tra máy thủy bình/ thủy chuẩn sau khi bị rơi, va đập</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy thủy bình bị rơi/ va đập có cần kiểm tra lại không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Đây là bước rất quan trọng trước khi tiếp tục thi công vì chỉ một sai lệch nhỏ trên máy thủy bình cũng có thể ảnh hưởng đến toàn bộ số liệu cao độ ngoài công trường. Nhiều trường hợp máy vẫn đọc mia bình thường nhưng thực tế tia ngắm đã bị sai lệch sau va đập.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi bị rơi máy thủy bình thường gặp những lỗi gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số lỗi phổ biến gồm:<br /> • Lệch bọt thủy.<br /> • Sai số góc i lớn.<br /> • Liệt rung hoặc nhảy rung cụm cân bằng tự động.<br /> • Nhìn mia hoặc mục tiêu không rõ.<br /> • Hư ốc cân bằng, vi động hoặc đế máy.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình bị lệch bọt thủy?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường do vận chuyển không đúng cách hoặc máy bị tác động mạnh khiến hệ thống cân bằng thay đổi vị trí, dẫn đến máy khó cân bằng hoặc cân bằng nhưng số đo không ổn định.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sai số góc i trên máy thủy bình là gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i là tình trạng tia ngắm không còn nằm ngang chuẩn. Khi đó đo đi – đo về có thể cho kết quả khác nhau và sai số cao độ tăng bất thường. Đây là lỗi rất phổ biến sau khi máy thủy bình bị va đập.</span></span></p> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Sai số góc i.png" style="width: 665px; height: 295px;" /></h3> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>“Liệt rung” hoặc “nhảy rung” là gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi liên quan đến cụm cân bằng tự động (Automatic Compensator) bên trong máy thủy bình. Cụm con lắc bên trong có thể bị: đứt dây treo, xoắn dây, kẹt rung hoặc lệch cơ cấu giảm dao động từ tính. <br /> Khi đó máy không còn tự cân bằng chính xác dù vẫn có thể đọc mia bình thường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850459087569_e24952711404d15f27d74612fb6b68f7.jpg" style="width: 460px; height: 219px;" /></span></span></p> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Dây rung máy thủy bình</em></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình nhìn mia không rõ sau va chạm?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân có thể do:<br /> <br /> • Kính bị bẩn hoặc trầy xước.<br /> • Hệ thống lấy nét bị ảnh hưởng.<br /> • Cụm quang học bị lệch sau va đập.<br /> <br /> Nếu không kiểm tra sớm có thể ảnh hưởng trực tiếp đến độ chính xác đo đạc.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy bị hư ốc cân bằng hoặc đế máy có nghiêm trọng không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Nếu máy bị rơi mạnh, các bộ phận cơ khí như: vi động, ốc cân bằng, đế máy… có thể bị cong, nứt hoặc biến dạng khiến việc cân bằng và đo đạc không còn chính xác như ban đầu.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi máy thủy bình bị rơi nên làm gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy, kiểm tra sai số góc i và cụm con lắc tự động trước khi tiếp tục đo công trình. </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm để tránh truyền sai số cho toàn bộ số liệu thi công. </span></p> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <strong style="margin: 0px; padding: 0px; font-weight: bold;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><a href="https://zalo.me/0913051734">Trắc Địa Thành Đạt</a> – Cung cấp máy thủy bình chính hãng!</span></span></strong></p> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Hotline: <strong style="margin: 0px; padding: 0px; font-weight: bold;">0913 051 734 / 0942 288 388</strong></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Địa chỉ: 145 Láng Hạ – Đống Đa – Hà Nội<br style="margin: 0px; padding: 0px;" /> Fanpage: Trắc Địa Thành Đạt</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '20260521180410f10bb16a2b4a9dbcb155bfe047377890.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Sửa Chữa Máy Thủy Bình Bị Rơi, Va Đập – Nguyên Nhân Gây Đo Sai & Cách Khắc Phục!', 'meta_key' => '', 'meta_des' => 'Máy thủy bình bị rơi, va đập dễ gây liệt rung, nhảy rung, sai số góc i và đo cao độ sai. Tìm hiểu nguyên nhân, dấu hiệu nhận biết và quy trình sửa chữa – hiệu chỉnh máy thủy bình tại Trắc Địa Thành Đạt.', 'created' => '2026-05-21', 'modified' => '2026-07-12', 'status' => '1', 'view' => '910', 'slug' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '543', 'rght' => '544', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '815', 'name' => 'Đo hầm bằng máy toàn đạc: So sánh Tunnel App Leica và giải pháp của các hãng khác', 'code' => null, 'alias' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi nói đến đo hầm bằng máy toàn đạc, thách thức lớn nhất không nằm ở thao tác đo… mà ở việc kiểm soát sai số và tiến độ thi công ngay tại hiện trường.</span></span>', 'content' => '<p> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong các công trình hầm, metro hoặc hạ tầng ngầm, đo hầm bằng máy toàn đạc là phương pháp gần như bắt buộc do không thể sử dụng GNSS. </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tuy nhiên, thách thức lớn nhất không nằm ở việc đo được điểm, mà là kiểm soát sai số và phát hiện sai lệch kịp thời ngay tại hiện trường. Nếu sai số chỉ được phát hiện sau khi xử lý dữ liệu tại văn phòng, việc hiệu chỉnh sẽ trở nên tốn kém và ảnh hưởng trực tiếp đến tiến độ thi công. </span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chính vì vậy, các hãng thiết bị trắc địa đã phát triển nhiều giải pháp khác nhau nhằm hỗ trợ kỹ sư kiểm soát tốt hơn trong quá trình đo hầm.</span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Tunnel App trên máy toàn đạc Leica FlexLine</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 Tunnel App là gì?</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tunnel App là module phần mềm tích hợp trong hệ điều hành FlexField trên các dòng máy toàn đạc Leica FlexLine như TS03 và TS07.<br /> <br /> Ứng dụng này cho phép người dùng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nạp dữ liệu thiết kế tuyến và biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực hiện stakeout trực tiếp ngoài hiện trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo profile và kiểm tra đào – đắp (cut & fill)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh sai lệch với thiết kế ngay trên máy</span></span></li> </ul> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.2 Ưu điểm của Tunnel App</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với phương pháp đo truyền thống, Tunnel App mang lại một số lợi ích rõ rệt:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thao tác trung gian giữa hiện trường và văn phòng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hiển thị sai lệch trực quan theo biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ phát hiện sai số ngay trong quá trình đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng tốc độ thi công và kiểm tra</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nổi bật của Leica là khả năng tích hợp toàn bộ workflow ngay trên thiết bị, phù hợp với các công trình cần triển khai nhanh ngoài hiện trường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Quy trình đo hầm ngoài công trường</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị của Leica, Trimble, Topcon hay các hãng khác, quy trình đo hầm bằng máy toàn đạc ngoài công trường về bản chất vẫn tuân theo một nguyên tắc chung: t<strong>hiết lập đúng – bố trí đúng – kiểm tra liên tục.</strong><br /> <br /> Bước đầu tiên và quan trọng nhất là <strong>thiết lập trạm máy</strong>. Kỹ sư trắc địa cần đặt máy tại vị trí khống chế đã biết tọa độ và định hướng bằng phương pháp <strong>backsight hoặc resection</strong>. Độ chính xác của bước này có ảnh hưởng trực tiếp đến toàn bộ tuyến hầm, bởi chỉ cần sai lệch nhỏ ở định hướng ban đầu cũng có thể dẫn đến sai số tích lũy theo chiều dài công trình.<br /> <br /> Sau khi trạm máy được thiết lập chính xác, dữ liệu thiết kế sẽ được nạp vào hệ thống. Các thông tin bao gồm tim tuyến (alignment), lý trình và biên dạng hầm (cross-section) đóng vai trò làm cơ sở để thực hiện stakeout ngoài thực địa. Ở giai đoạn này, việc kiểm tra lại hệ tọa độ, đơn vị và hướng tuyến là cần thiết nhằm tránh các sai sót do nhập liệu hoặc chuyển đổi dữ liệu.<br /> <br /> Trong quá trình thi công, các điểm đặc trưng của biên dạng hầm sẽ được bố trí trực tiếp ngoài hiện trường thông qua máy toàn đạc. Người đo sẽ lần lượt xác định vị trí các điểm theo thiết kế và hướng dẫn thi công đào hầm theo đúng hình học yêu cầu. Tuy nhiên, việc “bố trí đúng” chưa phải là bước cuối cùng.<br /> <br /> Khâu kiểm tra mới là yếu tố quyết định chất lượng. Các điểm sau khi bố trí cần được đo lại và so sánh với thiết kế bằng các phép đo lặp hoặc thông qua các công cụ kiểm tra trên máy. Việc này giúp phát hiện sớm các sai lệch về vị trí, cao độ hoặc hình dạng biên dạng hầm, từ đó kịp thời điều chỉnh trước khi sai số bị tích lũy.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/LGS_streamline_tunnel_construction_and_maintenance_2480x750.jpg" style="width: 800px; height: 242px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế, nhiều sai số lớn trong thi công hầm không đến từ thiết bị, mà đến từ việc không kiểm tra hoặc kiểm tra quá muộn. Vì vậy, một quy trình đo hầm hiệu quả luôn phải đảm bảo nguyên tắc: đo đến đâu, kiểm tra đến đó.<br /> <br /> Sự khác biệt giữa các hãng thiết bị hiện nay chủ yếu nằm ở mức độ hỗ trợ người dùng trong từng bước của quy trình này. Tuy nhiên, dù sử dụng công nghệ nào, cốt lõi của đo hầm bằng máy toàn đạc vẫn không thay đổi: <strong>Thiết lập chuẩn – dữ liệu đúng – kiểm tra liên tục.</strong></span></span> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. So sánh các giải pháp đo hầm của các hãng</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Leica – All-in-one tại hiện trường</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica là hãng đi theo hướng tích hợp toàn bộ quy trình đo hầm vào một ứng dụng duy nhất. Tunnel App giúp người dùng thực hiện liên tục các bước từ nạp dữ liệu, bố trí đến kiểm tra ngay tại hiện trường mà không cần phụ thuộc nhiều vào xử lý hậu kỳ.<br /> Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình thi công nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đội thi công cần thao tác đơn giản, trực quan.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica App Tunnel 3.jpg" style="width: 800px; height: 428px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Trimble – Hệ sinh thái và xử lý thiết kế</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trimble sử dụng phần mềm Trimble Access kết hợp với module Tunnels chuyên dụng. Giải pháp này tập trung vào khả năng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý alignment phức tạp</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối với phần mềm thiết kế như TBC</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý dữ liệu trong các dự án lớn</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự án metro, hầm quy mô lớn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu đồng bộ BIM</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Trimple tunnel.jpg" style="width: 800px; height: 446px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Topcon – Linh hoạt theo workflow</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không giống Leica, <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu-topcon-gm-50-series.html">Topcon</a> không phát triển một module “Tunnel App” riêng biệt cho dòng máy toàn đạc. Thay vào đó, hãng lựa chọn hướng tiếp cận linh hoạt hơn thông qua phần mềm <strong>MAGNET Field</strong>. Trong thực tế, công tác đo hầm bằng máy toàn đạc Topcon được thực hiện bằng cách kết hợp nhiều chức năng sẵn có như alignment, stakeout, offset và kiểm tra profile.<br /> <br /> <strong>Workflow điển hình trên Topcon</strong><br /> <br /> Người dùng sẽ bắt đầu bằng việc nạp dữ liệu tuyến (alignment) và các thông số thiết kế vào phần mềm. Sau khi thiết lập trạm máy, quá trình stakeout được thực hiện thông qua các điểm tuyến và các khoảng lệch (offset) theo biên dạng hầm. <br /> Đối với kiểm tra hình học, kỹ sư thường đo lại các điểm trên biên dạng thực tế và so sánh với thiết kế thông qua các công cụ kiểm tra trong phần mềm hoặc xử lý hậu kỳ.<br /> <br /> <strong>Ưu điểm của cách tiếp cận này</strong><br /> <br /> Điểm mạnh lớn nhất của Topcon là tính linh hoạt. Người dùng có thể tùy biến quy trình đo theo từng loại công trình mà không bị giới hạn bởi một module cố định. Điều này đặc biệt hữu ích trong các dự án có yêu cầu đặc thù hoặc khi dữ liệu thiết kế không theo một chuẩn cố định.<br /> <br /> <strong>Hạn chế cần lưu ý</strong><br /> <br /> Tuy nhiên, việc không có một module tunnel chuyên dụng cũng đồng nghĩa với việc:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy trình đo phụ thuộc nhiều vào kinh nghiệm người sử dụng,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc kiểm tra sai số không trực quan bằng các hệ thống tích hợp,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần hiểu rõ workflow để tránh sai sót trong quá trình triển khai.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nói cách khác, Topcon không làm “ít hơn”, nhưng yêu cầu người dùng phải “hiểu nhiều hơn”.</span></span><br /> <br /> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel.jpg" style="text-align: center; font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 800px; height: 533px;" /></h3> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.4 Nikon / Sokkia – Phương pháp truyền thống</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các dòng máy của Nikon và Sokkia chủ yếu sử dụng phương pháp truyền thống:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout cơ bản</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo và kiểm tra thủ công</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giải pháp này vẫn đáp ứng tốt các công trình quy mô nhỏ, nhưng hạn chế khi cần xử lý các dự án phức tạp.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Sự khác biệt cốt lõi trong đo hầm và yếu tố ảnh hưởng tới độ chính xác</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm khác biệt quan trọng nhất giữa các giải pháp không nằm ở khả năng đo, mà nằm ở thời điểm phát hiện sai số.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp truyền thống: phát hiện sai sau khi đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm tích hợp (Tunnel App, Tunnels Module): phát hiện sai ngay trong quá trình đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc phát hiện sai số sớm giúp giảm chi phí hiệu chỉnh và hạn chế rủi ro trong thi công.<br /> </span></span> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Những yếu tố ảnh hưởng đến độ chính xác</strong></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị hay phần mềm nào, độ chính xác trong đo hầm vẫn phụ thuộc vào:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định hướng trạm máy (backsight)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện môi trường ảnh hưởng đến đo EDM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số truyền tọa độ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kỹ năng và thao tác của người sử dụng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các phần mềm hiện đại chỉ đóng vai trò hỗ trợ, không thể thay thế hoàn toàn quy trình kiểm soát kỹ thuật ngoài công trường.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel 2.jpg" style="width: 800px; height: 415px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Đo hầm bằng máy toàn đạc đã có sự chuyển dịch rõ rệt từ phương pháp thủ công sang các giải pháp tích hợp và trực quan hơn. Tunnel App của Leica là một ví dụ điển hình cho xu hướng đưa việc kiểm soát sai số xuống ngay tại hiện trường. Trong khi đó, các hãng khác như Trimble, Topcon hay Nikon lựa chọn những hướng tiếp cận khác nhau, phù hợp với từng loại công trình và nhu cầu sử dụng.<br /> Tuy nhiên, yếu tố quan trọng nhất vẫn là: Hiểu đúng quy trình đo và chủ động kiểm soát sai số trong suốt quá trình thi công<br /> <br /> Nếu bạn cần tư vấn lựa chọn máy toàn đạc hoặc giải pháp đo hầm phù hợp với công trình, liên hệ ngay với chúng tôi!<br /> <br /> <span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt – Luôn đồng hành cùng bạn!</strong></span><br /> </span></span>', 'images' => '202604231558382137741e17c2868ead929b32a270f9f6.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Đo hầm bằng máy toàn đạc: Leica Tunnel App và các hãng khác', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách đo hầm bằng máy toàn đạc Leica với Tunnel App và so sánh với Trimble, Topcon, Nikon. Quy trình, ưu nhược điểm và cách kiểm soát sai số ngoài công trường.', 'created' => '2026-04-23', 'modified' => '2026-07-12', 'status' => '1', 'view' => '1482', 'slug' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '541', 'rght' => '542', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '814', 'name' => 'Máy toàn đạc điện tử: ĐO CHUẨN – BỐ TRÍ NHANH – ỔN ĐỊNH NGOÀI CÔNG TRƯỜNG!', 'code' => null, 'alias' => 'may-toan-dac-dien-tu-do-chuan-–-bo-tri-nhanh-–-on-dinh-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> Tại <strong>Trắc Địa Thành Đạt</strong>, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> <br /> Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Vì sao máy toàn đạc vẫn là thiết bị không thể thay thế?</span></span></h2> <br /> <p data-end="216" data-start="105"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong điều kiện thi công thực tế tại Việt Nam, nhiều khu vực thường gặp hạn chế về khả năng đo GNSS, chẳng hạn:</span></span></p> <ul data-end="407" data-start="218"> <li data-end="296" data-section-id="3ju1r3" data-start="218"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không gian bị che khuất bởi nhà cao tầng, công trình dày đặc hoặc tầng hầm</span></span></li> <li data-end="337" data-section-id="k3xm0j" data-start="297"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu vệ tinh yếu hoặc nhiễu mạnh</span></span></li> <li data-end="407" data-section-id="utqol9" data-start="338"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Yêu cầu độ chính xác cao đến milimet trong quan trắc và hoàn công.</span></span></li> </ul> <p data-end="491" data-start="409"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong những trường hợp này, máy toàn đạc vẫn là giải pháp hiệu quả và ổn định nhờ:</span></span></p> <ul data-end="665" data-start="493"> <li data-end="553" data-section-id="1rjirb8" data-start="493"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng đo khoảng cách chính xác cao bằng công nghệ EDM</span></span></li> <li data-end="594" data-section-id="1tziawf" data-start="554"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phụ thuộc vào tín hiệu vệ tinh</span></span></li> <li data-end="665" data-section-id="rakyqa" data-start="595"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm soát chặt chẽ công tác bố trí điểm và thi công ngoài thực địa.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hai chức năng cốt lõi của máy toàn đạc</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 Đo điểm (Measurement)</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là chức năng cơ bản và quan trọng nhất của máy toàn đạc trong công tác khảo sát. Máy thực hiện đo các yếu tố hình học gồm:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc ngang (Horizontal Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc đứng (Vertical Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách (EDM – Electronic Distance Measurement)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ các giá trị này, hệ thống sẽ tính toán và xác định tọa độ không gian của điểm đo dưới dạng (X, Y, Z).<br /> <br /> Ngoài ra, máy toàn đạc hiện đại còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo không gương (Non-prism) trong điều kiện khó tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu trữ và quản lý dữ liệu điểm đo trực tiếp trên máy</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xuất dữ liệu phục vụ xử lý nội nghiệp (CAD, TBC, Civil 3D…)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát địa hình, đo vẽ bản đồ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo hiện trạng công trình, kiểm tra kích thước</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lập lưới khống chế và thu thập dữ liệu phục vụ thiết kế</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica-Nova-TS60-BC-facing-right.jpg" style="width: 750px; height: 258px;" /></span></span><span style="display: none;"> </span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 Bố trí điểm (Stakeout)</span></span></h3> <p data-end="1067" data-start="941"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí điểm là quá trình chuyển thông tin từ bản vẽ thiết kế ra vị trí ngoài thực địa, đóng vai trò quan trọng trong thi công.</span></span></p> <p data-end="1114" data-start="1069"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựa trên tọa độ thiết kế, hệ thống thực hiện:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh tọa độ thiết kế với vị trí thực tế của gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán sai lệch theo các phương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn người đo di chuyển theo các chỉ dẫn:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trái / phải</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tiến / lùi</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lên / xuống</span></span></li> </ul> </li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhờ đó, điểm ngoài thực địa được đưa về đúng vị trí thiết kế với độ chính xác cao.<br /> <br /> Ngoài ra, các dòng máy hiện nay còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí tuyến, cung tròn (Road / Arc stakeout)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí theo lưới, theo tim trục</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai lệch sau thi công (As-built check)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định vị tim trục công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí móng, cột, dầm, sàn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thi công hạ tầng, giao thông, công trình kỹ thuật</span></span></li> </ul> <h2 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/image (11).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 660px; height: 371px;" /></h2> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Những lỗi đo cạnh thường gặp và cách xử lý</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Nguyên lý đo cạnh của máy toàn đạc</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc xác định khoảng cách bằng cách:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát tín hiệu laser hoặc hồng ngoại đến gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận tín hiệu phản xạ quay về</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán khoảng cách dựa trên thời gian truyền (Time of Flight) hoặc độ lệch pha (Phase Measurement).</span></span></li> </ul> </li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các hãng như Leica, Topcon, Nikon hay Trimble đều sử dụng nguyên lý này, chỉ khác nhau về công nghệ xử lý tín hiệu và thuật toán nội bộ.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Các nguyên nhân gây lỗi đo cạnh</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.1 Suy giảm hệ đo EDM<br /> <br /> Đây là nguyên nhân phổ biến nhất trong thực tế. Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo lặp lại cho kết quả khác nhau</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách “nhảy số”, không ổn định</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Linh kiện EDM xuống cấp theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát yếu hoặc bộ thu tín hiệu kém</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Làm việc trong điều kiện ánh sáng mạnh hoặc phản xạ kém</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo tài liệu của Leica Geosystems, độ chính xác đo cạnh phụ thuộc lớn vào cường độ tín hiệu phản xạ và điều kiện môi trường.<br /> <br /> 3.2.2 Lệch trục EDM – trục ngắm (Collimation error)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo gần tương đối đúng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo xa sai lệch tăng dần</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bị va đập, rung lắc trong quá trình sử dụng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lâu không hiệu chuẩn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai lệch cơ khí tích lũy</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số này ảnh hưởng rõ rệt khi đo khoảng cách lớn, đặc biệt trong các công trình yêu cầu độ chính xác cao.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lỗi đo cạnh ( trục) 2.png" style="width: 680px; height: 295px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.3 Sai hằng số gương (Prism constant)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số gần như cố định trên mọi khoảng cách</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng sai loại gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai giá trị hằng số gương (0, -30, +17.5 mm…)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Trimble, việc thiết lập đúng prism constant là điều kiện bắt buộc để đảm bảo độ chính xác đo cạnh.<br /> <br /> 3.2.4 Ảnh hưởng môi trường đo<br /> <br /> Các yếu tố môi trường có thể ảnh hưởng đáng kể đến kết quả đo:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiệt độ và áp suất (P/T)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiễu khí quyển</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bề mặt phản xạ kém (tường sơn tối, bề mặt ướt, kim loại)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo khuyến nghị của FIG, sai số EDM tăng lên đáng kể trong điều kiện khí quyển không ổn định.<br /> <br /> 3.2.5 Sai số do thao tác người dùng<br /> <br /> Đây là nhóm lỗi rất phổ biến ngoài công trường.Bao gồm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựng sào không thẳng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai chiều cao gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập sai trạm máy hoặc điểm định hướng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình hệ tọa độ không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số do người dùng thường khó nhận biết nếu không có quy trình kiểm tra chéo.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Cách khắc phục</span></span></h3> <br /> <ul> <li data-end="2098" data-section-id="zvrhg8" data-start="2066"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra EDM, 2C, MO định kỳ</span></span></li> <li data-end="2130" data-section-id="uu2tiv" data-start="2099"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng đúng prism constant</span></span></li> <li data-end="2172" data-section-id="nwvnt0" data-start="2131"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm tra cạnh chuẩn trước thi công</span></span></li> <li data-end="2209" data-section-id="ux2ibp" data-start="2173"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh đo trong điều kiện bất lợi</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Các dòng máy toàn đạc phổ biến</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Leica</strong><br /> <br /> Leica là thương hiệu cao cấp trong lĩnh vực trắc địa, nổi bật với độ chính xác và độ ổn định lâu dài. Hệ EDM mạnh, khả năng làm việc tốt trong nhiều điều kiện môi trường khác nhau, đặc biệt phù hợp với các công trình yêu cầu kỹ thuật cao.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao, ổn định theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ EDM mạnh, ít bị ảnh hưởng bởi môi trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm và thuật toán xử lý tốt</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình cao tầng, cầu đường, quan trắc, dự án yêu cầu kiểm soát sai số chặt chẽ.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Leica toàn đạc.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Topcon</strong><br /> <br /> Topcon là dòng máy phổ biến nhờ sự cân bằng giữa hiệu năng và chi phí. Thiết bị dễ sử dụng, độ bền tốt, đáp ứng đa dạng nhu cầu thi công ngoài công trường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, thao tác nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ ổn định tốt trong điều kiện công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chi phí hợp lý</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, hạ tầng, thi công phổ thông.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z6599539340575_12c3eac505cba39e86905990604ee094.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nikon</strong><br /> <br /> Nikon là lựa chọn phù hợp cho các đơn vị cần thiết bị đo đạc cơ bản với chi phí đầu tư thấp. Thiết kế đơn giản, dễ tiếp cận và đáp ứng tốt các công việc đo đạc thông thường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giá tốt, dễ tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, phù hợp người mới</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền ổn định</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, khảo sát cơ bản.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/DTM 352 Nikon 2.jpg" style="width: 680px; height: 509px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Sokkia</strong><br /> <br /> Sokkia có cùng hệ sinh thái với Topcon, nổi bật về độ bền và khả năng làm việc ổn định trong điều kiện công trường khắc nghiệt. Thiết bị được đánh giá cao về tính “lành”, ít lỗi vặt.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền cao, ổn định lâu dài</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động tốt trong môi trường khắc nghiệt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác đáp ứng tốt thi công</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình hạ tầng, công trường làm việc cường độ cao.<br /> <br /> <strong>Trimble</strong><br /> <br /> Trimble tập trung mạnh vào giải pháp tích hợp và hệ sinh thái phần mềm. Các dòng máy toàn đạc của Trimble nổi bật ở khả năng kết nối, xử lý dữ liệu và làm việc đồng bộ với GNSS.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ sinh thái phần mềm mạnh (Access, TBC…)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tích hợp GNSS và quản lý dữ liệu tốt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp quy trình làm việc hiện đại</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Dự án lớn, doanh nghiệp cần đồng bộ dữ liệu và quản lý thi công<br /> <br /> > Mỗi thương hiệu đều có định hướng và thế mạnh riêng. Việc lựa chọn nên dựa trên nhu cầu thực tế, điều kiện công trường và yêu cầu kỹ thuật của từng dự án để đạt hiệu quả tối ưu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cách chọn máy toàn đạc phù hợp công trình</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc lựa chọn máy toàn đạc cần dựa vào yêu cầu kỹ thuật và điều kiện thi công thực tế, thay vì chỉ nhìn vào thương hiệu hoặc giá thành.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình dân dụng, hạ tầng cơ bản</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với các dòng Nikon hoặc Topcon nhờ dễ sử dụng, độ ổn định tốt và chi phí hợp lý. Đáp ứng hiệu quả cho các công việc đo đạc, bố trí thông thường.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu độ chính xác cao</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên ưu tiên Leica hoặc các dòng cao cấp, với độ chính xác và độ ổn định cao, phù hợp cho nhà cao tầng, kết cấu thép hoặc các hạng mục cần kiểm soát sai số chặt chẽ.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quan trắc, kiểm soát biến dạng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lựa chọn máy có độ chính xác cao và hệ EDM ổn định, đảm bảo khả năng lặp lại kết quả trong nhiều chu kỳ đo.<br /> <br /> Nguyên tắc quan trọng: Lựa chọn đúng thiết bị theo nhu cầu thực tế sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm sai số trong đo đạc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tối ưu chi phí đầu tư</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nâng cao hiệu quả thi công</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo chất lượng công trình</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Tại sao nên mua máy toàn đạc tại Trắc địa Thành Đạt?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi cung cấp đa dạng các loại máy toàn đạc của các hãng <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu">Leica</a>, Nikon, Topcon, đáp ứng nhiều nhu cầu khác nhau trong thi công và khảo sát.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tư vấn đúng nhu cầu công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ kỹ thuật ngoài công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn sử dụng, kiểm tra sai số</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cung cấp thiết bị chính hãng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> Bạn đang phân vân giữa các dòng máy toàn đạc? Hoặc gặp lỗi đo cạnh ngoài công trường?<br /> <br /> >>> Liên hệ ngay <a href="https://zalo.me/0913051734"><strong>Trắc Địa Thành Đạt</strong></a> để được tư vấn phù hợp nhất! </span></span>', 'images' => '20260505102744e930c0e340a0ba993987b0238086413c.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử: Báo giá, tư vấn chọn máy chuẩn công trình!', 'meta_key' => '', 'meta_des' => 'Tìm hiểu máy toàn đạc điện tử, cách chọn máy phù hợp công trình. Tư vấn thiết bị chính hãng tại Trắc Địa Thành Đạt!', 'created' => '2026-04-20', 'modified' => '2026-07-11', 'status' => '1', 'view' => '6424', 'slug' => 'may-toan-dac-dien-tu-do-chuan-bo-tri-nhanh-on-dinh-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '539', 'rght' => '540', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $tinlq = array( (int) 0 => array( 'Post' => array( 'id' => '644', 'name' => 'GNSS RTK', 'code' => null, 'alias' => 'gnss-rtk', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; border: 0px; background-image: initial; background-position: 0px 0px; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; outline: 0px; vertical-align: top; color: rgb(0, 0, 0); font-size: 14px; text-align: justify; font-weight: 700 !important;">GNSS RTK</span><span style="color: rgb(0, 0, 0); font-size: 14px; text-align: justify;"> được biết đến là thiết bị dùng trong công tác trắc địa giúp hỗ trợ quá trình khảo sát địa hình. Với khả năng tự động vẽ và lưu lại các khu vực khảo sát giúp nhanh chóng hoàn thiện các bản vẽ đầy đủ, chính xác với các thông số kỹ thuật cần thiết. Đây là thiết bị hỗ trợ đắc lực cho những người làm công tác trắc địa để có thể hoàn thành công việc nhanh chóng, tiết kiệm thời gian và chi phí với độ chính xác cao.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường hiện nay có rất nhiều dòng máy GNSS RTK với sự đa dạng về kiểu dáng thiết kế, các tính năng cũng như kích thước cho khách hàng lựa chọn. Với mỗi sản phẩm sẽ có những đặc tính cũng như công năng riêng phù hợp với nhu cầu sử dụng của từng đối tượng khách hàng cũng như tính chất công việc. Cùng tìm hiểu ưu và nhược điểm của máy GNSS RTK để có cái nhìn tổng quan về nó trước khi bạn lựa chọn đầu tư cho dự án của mình.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <strong>Ưu điểm nổi bật của máy GNSS RTK </strong><br /> <br /> Đảm bảo độ chính xác cao nhất trong quá trình làm việc. Đối với công tác trắc địa thì độ chính xác là thông số quan trọng nhất cần hướng tới trong quá trình làm việc do đó các thiết bị hỗ trợ cũng cần tối ưu hóa được yếu tố này. Với việc áp dụng công nghệ RTK cũng như CORS Network các mẫu máy này đảm bảo mang đến các thông số chuẩn nhất để cung cấp dữ liệu cho quá trình vẽ cũng như hình thành các dữ liệu chung.<br /> <br /> Trong việc sử dụng công nghệ GNSS thì CORS là trạm tham chiếu hoạt động liên tục để tạo sự liên kết các thiết bị với đường truyền tín hiệu. Công nghệ này giúp khoảng cách tối đa giữa trạm gốc và máy định vị GNSS được thiết lập khoảng 10 - 15km, giúp tăng khoảng cách cho hoạt động của máy. Điều này giúp giảm nhân công cũng như chi phí trong quá trình làm việc.<br /> <br /> Với thiết kế nhỏ gọn, dễ dàng di chuyển giúp mang đến sự tiện lợi tối đa trong quá trình sử dụng. <br /> <br /> Một ưu điểm phải kế đến của loại máy GNSS RTK đó là việc tích hợp nhiều tính năng thông minh trong cùng thiết bị. Các tính năng điều khiển bằng giọng nói, bảng điều khiển điện tử, việc thay đổi kích thước máy được tích hợp …giúp dễ dàng sử dụng cũng như có thể thực hiện được nhiều chức năng khác nhau cùng lúc.<br /> <br /> Bộ nhớ trong lớn giúp tăng khả năng lưu trữ thông tin cùng với đó là khả năng kết nối với máy tính, điện thoại, bluetooth hay 3G, 4G giúp nâng cao tối đa được các công năng cũng như sự tiện lợi trong quá trình sử dụng.<br /> <br /> Khả năng kết nối với các thiết bị khác tối ưu cùng với hệ thống CORS.<br /> <br /> Với chất liệu cao cấp có khả năng chống va đập cũng như hạn chế tối đa các tác động của các yếu tố bên ngoài giúp mang đến sản phẩm bền đẹp lâu dài theo thời gian sử dụng.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/phân phối máy định vị vệ tinh 2 tần số rtk (1).png" style="width: 850px; height: 604px;" /><br /> <br /> <strong>Nhược điểm của máy GNSS RTK</strong><br /> <br /> Hiện nay, máy GPS –GNSS RTK chất lượng dù đã được tích hợp đầy đủ các tính năng nhưng để có được độ chính xác tuyệt đối cùng với vi</span>ệc</span> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">thực hiện thêm nhiều công việc khác các bạn cần phải có sự kết nối thêm các thiết bị khác để sử dụng.<br /> <br /> Giới hạn làm việc của máy trong một phạm vi nhất định cũng là một khó khăn trong quá trình sử dụng. Do đó, cần tìm hiểu đầy đủ các thông số của máy trước khi lựa chọn để phù hợp với đặc điểm công việc.<br /> <br /> Giá thành cao cũng là một nhược điểm cần tính đến khi quyết định đầu tư. <br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Máy RTK.png" style="width: 850px; height: 680px;" /><br /> <br /> </span></span>', 'images' => '2021081816133230412c34d3b16d2ec66a3d1eba4d0d89.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Máy RTK, máy định vị vệ tinh RTK, máy GPS RTK, máy định vị vệ tinh GNSS RTK, máy RTK giá rẻ, máy RTK tốt nhất', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-18', 'modified' => '2026-07-12', 'status' => '1', 'view' => '20547', 'slug' => 'gnss-rtk', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '231', 'rght' => '232', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '641', 'name' => 'Phần mềm LandStar 7 và cách cài đặt trên máy tính', 'code' => null, 'alias' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LandStar 7 là một ứng dụng miễn phí được phát triển bởi www.chcnav.com, thuộc danh mục Bản đồ và dẫn đường. </span></span>', 'content' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="294" src="https://www.youtube.com/embed/04hr6Gy-3RE" title="YouTube video player" width="680"></iframe><br /> <br /> LandStar7 là giải pháp phần mềm khảo sát đã được kiểm chứng thực địa mới nhất dành cho mọi thiết bị Android và bộ điều khiển dữ liệu CHCNAV. Được thiết kế cho các nhiệm vụ khảo sát và lập bản đồ có độ chính xác cao, LandStar7 cung cấp khả năng quản lý quy trình làm việc liền mạch, giao diện người dùng đồ họa dễ học và dễ sử dụng để hoàn thành tất cả các dự án của bạn một cách hiệu quả. Các định dạng nhập và xuất dữ liệu toàn diện, nhiều phương pháp đo lường đảm bảo năng suất tức thì.<br /> <br /> - Hỗ trợ nhiều loại định dạng nhập và xuất khác nhau LandStar7 nhập và xuất DXF, DWG, SHP, KML, KMZ, CSV, DAT, TXT cũng như nội dung dữ liệu được tùy chỉnh đầy đủ từ dự án khảo sát lựa chọn các định dạng CSV, DAT và TXT.<br /> <br /> - Xác định vị trí và trực quan hóa dữ liệu dự án của bạn trong nháy mắt LandStar7 tích hợp bản đồ trực tuyến của Google, OSM, BING và WMS để cung cấp thông tin vị trí có ý nghĩa cho các nhà khảo sát và chuyên gia xây dựng. Các dự án được hiển thị trong địa hình khu vực hoặc hình ảnh vệ tinh trong thời gian thực.<br /> <br /> - Rất linh hoạt và sẵn sàng cho nhiều ứng dụng LandStar7 được thiết kế để cung cấp cho bạn các bộ tính năng đặc biệt, từ khảo sát đất đai, các dự án xây dựng và kỹ thuật, lập bản đồ, thu thập dữ liệu GIS, liên quan đến đường đến khảo sát đường ống.<br /> <br /> Giao diện người dùng có thể tùy chỉnh của nó giúp LandStar7 dễ sử dụng bằng cách tập trung vào các chức năng thiết yếu thường được sử dụng. Quy trình phát triển phần mềm linh hoạt Nhóm phát triển LandStar7 của chúng tôi giữ liên lạc thường xuyên với các nhà khảo sát, các chuyên gia xây dựng và mạng lưới đối tác trên toàn thế giới của chúng tôi để mang lại các chức năng vượt trội mới. Khi sử dụng LandStar7 ngay hôm nay, bạn được đảm bảo tận hưởng các tính năng mới thường xuyên mà không phải trả thêm phí.<br /> <br /> <strong>>>></strong> Trong bài viết bên dưới đây chúng tôi sẽ giới thiệu tới bạn cách cài đặt LandStar 7 trên máy tính (PC Windows & Mac). Phương pháp mà chúng tôi áp dụng là sử dụng Bluestacks, công cụ giả lập hệ điều hành Android hàng đầu hiện nay. Tất cả những gì bạn cần chỉ là một chiếc máy tính chạy Windows hoặc Mac.<br /> <br /> <strong>Bước 1:</strong> Tải xuống và cài đặt Bluestacks<br /> Tải phiên bản mới nhất tại đây <a href="https://www.bluestacks.com/vi/index.html" target="_blank">https://www.bluestacks.com/vi/index.html</a>. Trang web này hỗ trợ tiếng Việt nên bạn có thể dễ dàng tải về file cài đặt của Bluestacks. Quá trình tải về có thể mất vài phút.<br /> Sau khi tải về, nhấp chuột vào file bạn mới tải xuống để bắt đầu quá trình cài đặt. Giao diện cài đặt rất đơn giản, quá trình cặt đặt sẽ diễn ra nhanh chóng. Nếu có bất cứ vấn đề gì bạn có thể vào mục hỏi đáp của Bluestacks để tham khảo cách xử lý.<br /> <br /> <strong>Bước 2:</strong> Tải xuống file cài đặt của LandStar 7 cho máy tính PC Windows<br /> File cài đặt này có đuôi là .APK. APK là viết tắt của cụm từ tiếng Anh "Android application package" (tạm dịch là bộ cài đặt ứng dụng cho hệ điều hành Android). Bạn có thể tải về file apk này từ trang web của chúng tôi <a href="https://drive.google.com/file/d/1vSHDZvVz9EjJtpVAeKgVzJaua3D-Wwf1/view?usp=sharing">TẠI ĐÂY</a>.<br /> <br /> <strong>Bước 3:</strong> Tiến hành cài đặt LandStar 7 bằng Bluestacks<br /> Tập tin APK của LandStar 7 sau khi tải về có thể được cài đặt vào Bluestacks theo một trong các cách sau:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhấp đúp vào file APK, cách này đơn giản và nhanh nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuột phải vào file APK, chọn "Open With", sau đó chọn Bluestacks.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kéo thả file APK vào màn hình ứng dụng Bluestacks</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quá trình cài đặt LandStar 7 sẽ diễn ra nhanh chóng. Ngay sau khi quá trình cài đặt kết thúc, bạn sẽ thấy biểu tượng icon của LandStar 7 trên màn hình trang chủ của Bluestacks. Nhấp chuột vào biểu tượng icon này để bắt đầu sử dụng LandStar 7 trên máy tính PC Windows.</span></span><br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> ', 'images' => '2021080616092739e989a091af097f2762083a8ccfb10e.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23109', 'slug' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '225', 'rght' => '226', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '640', 'name' => 'iRTK4 Hi-Target - A Simple but not Simplistic GNSS System', 'code' => null, 'alias' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">iRTK4 Hi-Target là hệ thống thu GNSS thông minh đầy đủ tính năng được trang bị anten mới tích hợp đa kênh tiên tiến cho phép người dùng giải được các bài toán đo đạc một cách chính xác, đáng tin cậy. Tính năng Tilt-Surveying không cần hiệu chuẩn mà vẫn có thể thu thập dữ liệu ở nhiều nơi.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. RTK tiên tiến thế hệ mới<br /> <br /> Quản lý tín hiệu vệ tinh linh hoạt giúp bạn có được giải pháp chính xác hơn. Hiệu suất được cải thiện 20% trong môi trường GNSS đầy thử thách.<br /> <br /> 2.IMU (Biểu tượng)<br /> <br /> Bắt đầu ngay lập tức với công nghệ bù nghiêng không cần hiệu chuẩn, hỗ trợ bạn khảo sát nhanh chóng và chính xác hoặc xác định các điểm mà không cần cân bằng cột, Sai số dưới 3cm trong phạm vi nghiêng 45 °, tăng hiệu suất làm việc lên 20%.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/iRTK4(1).jpg" style="width: 383px; height: 131px;" /><br /> <br /> 3. Sạc nhanh<br /> <br /> Sạc pin của bạn lên đến 50 phần trăm chỉ trong 50 phút với bộ chuyển đổi 45W, nhờ khả năng sạc nhanh, bạn có thể sạc lại trong thời gian ngắn hơn.<br /> <br /> 4. Giao diện người dùng web (WEB UI)<br /> <br /> Cách nhanh chóng và hiệu quả để giám sát và điều khiển các thiết bị phần cứng. Ngoài ra, cung cấp quyền truy cập vào các tính năng được sử dụng phổ biến nhất thông qua trình duyệt web hiện có trên thiết bị bạn chọn — không cần tải xuống hoặc cài đặt bất kỳ thứ gì!<br /> <br /> 5. Smart Base<br /> <br /> Tối ưu hóa tuyệt vời cài đặt chế độ làm việc, Tự động ghép nối Base và Rover của bạn bằng dịch vụ toàn cầu Hi-target, mở rộng phạm vi công việc và tiết kiệm thời gian của bạn.<br /> <br /> Radio ngoài thế hệ mới<br /> <br /> HDL-460A cung cấp thông tin liên lạc dữ liệu đáng tin cậy cho các ứng dụng quan trọng trong đó yêu cầu sự kết hợp của sự ổn định, hiệu suất cao và phạm vi xa.<br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> </span></span>', 'images' => '20210805113424adf751172d9f3d7ddcf7e526d09e3fb6.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-05', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23795', 'slug' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '223', 'rght' => '224', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '639', 'name' => 'Thông số kỹ thuật của một số dòng máy toàn đạc điện tử Leica (cũ): TCR-403, TCR-405, TCR-407, TCR-705, TCR-802, TCR-805', 'code' => null, 'alias' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><font color="#323232">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ: </font><span style="line-height: 107%; letter-spacing: 0.1pt;">Leica TCR-802 Power, Leica TCR-805, Leica TC-705.</span></span></span> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> </h1> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="font-size: 17pt; line-height: 107%; font-family: Helvetica, sans-serif; letter-spacing: 0.1pt;"><o:p></o:p></span></h1> ', 'content' => '<p> <font color="#323232" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ:<br /> <br /> - </font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; line-height: 14.98px; letter-spacing: 0.1pt;">Leica TCR-802 Power<br /> - Leica TCR-805<br /> - Leica TC-705</span><br /> - <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica TCR 403, 405,407 Power</span></span><br /> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">I. Máy toàn đạc điện tử Leica TCR-802 Power</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 2”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/154253643_1379364745733010_5284105879190099443_o (1)(1).jpg" style="width: 480px; height: 360px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Máy toàn đạc điện tử Leica TCR-805</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 5”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/abaec5a286b071ee28a19.jpg" style="width: 480px; height: 640px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">III. Máy toàn đạc điện tử Leica TC-705</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Đo góc<br /> - Có độ chính xác là: ±5”<br /> - Cách đo: liên tục, đối tâm và tuyệt đối.<br /> 2. Hệ thống bù trục<br /> - 4 trục bù nghiêng<br /> - Dải bù nghiêng là : 4’<br /> - Có độ chính xác bù trục là: ±0.5”<br /> 3. Đo cạnh có gương<br /> - Khi đo bằng gương GPR1 là: 1.000m<br /> - Khi đo bằng gương GRZ4 là: 600m<br /> - Khi đo bằng gương mini GMP 101 là: 400m<br /> - Đối với gương giấy 60 x 60mm là: 250m<br /> - Có độ chính xác là: ±1mm + 1.5 ppm / 2.4 giây<br /> - Khi đo nhanh là: ±3 mm+1.5 ppm / 0.8s<br /> - Hiển thị là: 0.1 mm<br /> - Cách thức: Đổi pha với tia laze đỏ đồng trục, rõ rệt.<br /> 4. Đo cạnh không gương<br /> - PinPoint R200 là : 200m<br /> - Có độ chính xác là: ±2mm + 2 ppm / 3 giây<br /> 5. Ống kính<br /> - Có độ phóng đại ống kính là: 30 X<br /> - Độ mở ống kính là : 40mm<br /> - Dải điều quang: từ 1.7 m cho tới vô cùng<br /> 6. Dọi tâm<br /> - Kiểu dọi tâm: bằng tia laze<br /> - Có độ chính xác là: ±1mm tại 1.5 chiều cao máy<br /> 7. Màn hình, bàn phím<br /> - Được trang bị 01 Màn hình LCD rõ nét<br /> - Bàn phím gồm có chữ và số. Có chiếu sáng cho màn hình<br /> 8. Quản lý dữ liệu<br /> - Có bộ nhớ trong là: 10.000 điểm nhập cùng với điểm đo được<br /> - Truyền dữ liệu: GSI-Format via RS232<br /> - Trao đổi dữ liệu: GS116 / IDEX / GS18 / dxf<br /> 9. Pin của máy<br /> - Sử dụng Pin Lithium-Ion GEB 121,<br /> - Thời gian vận hành: từ 5 đến 8 tiếng<br /> 10. Trọng lượng<br /> - Đầu máy nặng: 5,6 kg<br /> 11. Khả năng chống nước và chống bụi<br /> - Đã đạt được tiêu chuẩn IP54<br /> - Có khả năng chịu độ ẩm lên đến 95%</span></span><br /> <br /> <h2> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IV. Máy toàn đạc điện tử Leica TCR-403; TCR-405; TCR-407</span></span></h2> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Dòng sản phẩm LEICA Total Station TPS400 Power (TCR403/405/407 Power) nổi bật với chế độ đo không gương (bằng tia laser) và laser chỉ hướng.</span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Thừa hưởng đầy đủ các tính năng của TPS400, TPS400 Power còn được tích hợp thêm khả năng đo xa bằng tia laser không cần gương, chỉ cần ngắm vào vật có độ phản xạ đủ cao (90%). Điều này đã giúp cho TPS400 Power năng động và tiện lợi hơn.</span><br /> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">1. Ống kính:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ phóng đại: 30 x<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trường nhìn : 1° 30’(1.66 gon) 26m tại khoảng cách 1km<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phạm vi điều tiêu: 1.7 m đến vô cùng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thể lưới: chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 2. Bộ nhớ, truyền dữ liệu:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ nhớ trong: 24.000 điểm ghi<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Định dạng dữ liệu: GSI / DXF / XML / ASCII/XLS/ Định dạng tự do<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 3. Bàn phím và màn hình<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Màn hình: 01 màn hình tinh thể lỏng LCD <a href="http://tracdiathanhdat.vn/gioi-thieu-cong-ty-cp-cn-va-tm-thanh-dat.htm" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;">160×280</a> pixel, đèn chiếu sang 5 cấp<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bàn phím tiêu chuẩn Alpha<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 4. Đo góc ( Hz, V)<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác (ISO 171233): 5”<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Hiển thị: 1” / 0.1 mgon / 0.01 mil<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phương pháp: tuyệt đối, liên tục, đối tâm<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ bù: tăng lên bốn lần sự bù trục<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác thiết đặt độ bù: 2”</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">5. Đo khoảng cách tới điểm phản xạ:</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Đo không gương (đo Laser RL): 170 m </span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Gương GPR1: 3500m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Tấm phản xạ (60mmx60mm): 250m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác/ Thời gian đo:<br style="margin: 0px; padding: 0px;" /> + Đo chính xác (Fine) : ±(5 mm+2 ppmD)/ 2.4 giây,<br style="margin: 0px; padding: 0px;" /> + Đo nhanh: ±(5mm+2ppmD)/0.8 giây,<br style="margin: 0px; padding: 0px;" /> + Đo đuổi: ±(5mm+2ppmD)/< 0.15 s<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 6. Hệ điều hành: Windows CE: 5.0 Core<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 7. Dọi tâm laser:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại : Điểm laser,chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác dọi tâm:1.5mm trên 1.5m chiều cao máy<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 8. Nguồn pin (GEB221):<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại: LithiumIon<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thời gian làm việc: hơn 20 h<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trọng lượng: 5.1 kg<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 9. Môi trường hoạt động:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Biên độ làm việc: từ -20°C tới +50°C<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Chịu nước và bụi (IEC 60529): IP55<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ ẩm: 95% không ngưng tụ</span></span><br /> </p> <table border="1" cellpadding="0" cellspacing="0" style="width:619px;" width="619"> <tbody> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu kỹ thuật </strong></span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>403</strong></span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>405</strong></span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>407</strong></span></span></td> </tr> <tr> <td colspan="3" style="width:499px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Độ góc (Hz, V)</strong></span></span></td> <td style="width:120px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương thức</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo liện tục tuyệt đối</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gốc hiển thị (bước nhảy)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″ / 0.1 mgon / 0.01 mil</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -3)</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3″ (1 mgon)</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5″ (1.5 mgon)</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7″ (2 mgon)</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Ống kính</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ số phóng đại</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">30x</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trưng nhìn</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1° 30′ (26 m at 1 km)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khỏang cách nhìn gần I</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưới chữ thập</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiếu sáng</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Bù nghiêng</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống bù nghiêng</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng 2 trục</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Setting accuracy</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5″</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2″</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Đo khoảng cách bằng tia hồng ngoại</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring range with circular prism GPR1</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring with reflective foil<br /> (60 mm x 60 mm)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">250m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -4)<br /> (fine/quick/tracking)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2mm + 2 ppm/5 mm + 2 ppm/5 mm + 2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">< 1 sec/< 0.5 sec/< 0.15 sec</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chính xác, nhanh, do liên tục.</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo khoảng cách không gương</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R100 (“power”) 170m (90 % reflective)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(Medium atmospheric conditions)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R300 (“ultra”) > 500 m (90 % reflective)<br /> Laser at GPR circular reflector 7’500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3mm+2 ppm/5 mm+2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">typ. 3 s/1 s</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kíck cỡ điểm với 100 m</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">12mm x 40 mm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu</strong></span></span></td> <td colspan="3" style="width:354px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ trong</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 Điểm đo</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao tiếp</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RS232</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng dữ liệu</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GSI/ASCII/dxf/Freely definable formats</span></span></td> </tr> </tbody> </table> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"> </span></span></span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="width: 250px; height: 100px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '202107301638040599a20d3fb57fe46b312b506c17e5cc.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử ', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-30', 'modified' => '2026-07-12', 'status' => '1', 'view' => '19533', 'slug' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '221', 'rght' => '222', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '638', 'name' => 'Những lỗi thường gặp ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m', 'code' => null, 'alias' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span>', 'content' => '<br /> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tham khảo một số lỗi và ý nghĩa của những lỗi này ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m</span></span><br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1565334829-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-dathop-02.jpg" style="width: 620px; height: 477px;" /><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp các lỗi trên hãy liên hệ với chúng tôi qua số hotline để được khắc phục nhé!<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/hotline(1).png" style="width: 250px; height: 100px;" /></span></span><br /> ', 'images' => '2021072917090604e0ee7f57cb99fce8677b2f946c35af.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình điện tử', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-29', 'modified' => '2026-07-12', 'status' => '1', 'view' => '14983', 'slug' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '219', 'rght' => '220', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '637', 'name' => 'So sánh giữa Garmin GPSMAP 66S vs GPSMAP 64S', 'code' => null, 'alias' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tham khảo sự khác nhau giữa hai dòng máy định vị GPSMAP 66s và 64s của hãng Garmin và những ưu điểm vượt trội mà Garmin đã mang tới cho dòng máy GPSMAP 66s nhé.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>GPSMAP 66s</strong>: Thiết bị cầm tay đa vệ tinh tích hợp cảm biến.</span></span><br /> <br /> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">GPSMAP 64s</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">: </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);">Độ nhạy máy thu cao, thiết bị có thể cùng lúc nhận được tín hiệu vệ tinh từ hai hệ thống GPS và GLONASS. GPSMAP 64s</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);"> kèm theo khí áp kế để đo cao độ, la bàn điện tử, kết nối USB tốc độ cao, hỗ trợ khe cắm thẻ nhớ, đồng thời có khả chia sẽ dữ liệu bằng Wireless với các thiết bị Garmin tương thích khác.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/So sánh GPS 66 và 64.jpg" style="width: 690px; height: 459px;" /><br /> <br /> <br /> <u><strong>>>> Cùng so sánh thông số kỹ thuật của hai dòng máy GPSMAP 66s và 64s:</strong></u></span></span><br /> <br /> <br /> <table border="1" cellpadding="0" cellspacing="0"> <tbody> <tr> <td style="width:161px;"> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 66s</strong></span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 64s</strong></span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước tổng thể:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.2 x 16.3 x 3.5cm</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.1 x 16 x 3.6cm</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3 inches</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.6 inches</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ phân giải màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">240 x 400p (pixel)</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">160 x 240p (pixel)</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ khả năng:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">16GB</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4GB</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Waypoint/Routes/ Tracklog:</span></span></td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">20000 Điểm, 250 GPX Track và 300 điểm được lưu</span></span></td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 điểm, 200 điểm được lưu</span></span></td> </tr> </tbody> </table> <br /> <ul> <li> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Theo dõi hoạt động thời tiết </span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tải xuống hình ảnh vệ tinh trực tiếp (không đăng ký)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chắc chắn theo tiêu chuẩn MIL-STD 810G cho hiệu suất nhiệt, sốc và nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhật ký Rinex</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối WiFi / Bluetooth</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Thiết kế phần cứng</strong><br /> Từ góc độ thiết kế, cả hai thiết bị đều cực kỳ giống nhau, với một vài khác biệt nhỏ về kích thước và màn hình<strong>. </strong>GPSMAP 66S có kích thước tổng thể lớn hơn một chút, nhưng sự khác biệt là gần như không thể nhận ra. Ngoài những thay đổi trực quan rõ ràng, họ cảm thấy khá giống với mẫu cũ. Những thay đổi khác là các nút nhỏ gọn hơn một chút nhưng rộng hơn. Các chức năng của nút giống nhau mặc dù phiên bản GPSMAP 66s có menu khác.<br /> <br /> Nút nguồn được đặt ở phía trên của thiết bị. Vị trí trên GPSMAP 64 có vẻ được ưu thích hơn vì bật / tắt dễ dàng nhưng bạn có thể hiểu lý do tại sao Garmin muốn thực hiện thay đổi này vì nó ít có khả năng bị hỏng khi bật thiết bị và lãng phí điện năng của bạn.<br /> <br /> Khác với những thay đổi đó và màn hình lớn hơn một chút, tất cả các cổng đều giống nhau, mặc dù Garmin đã thay đổi dây nguồn / dữ liệu thành MicroUSB. Khe cắm thẻ Micro SD có thể bên dưới pin.<br /> <br /> <strong>Tuổi thọ pin</strong><br /> Cả hai thiết bị đều hoạt động trên hai pin AA và tuổi thọ thông thường sẽ là 16 giờ mặc dù điều đó chủ yếu phụ thuộc vào chức năng ứng dụng và sử dụng GPS của bạn. GPSMAP 66 mới cũng có chức năng "<strong>Expedition"</strong> , giúp tăng đáng kể thời lượng pin của thiết bị bằng cách hạn chế các chức năng phần mềm tự động như điểm theo dõi, thời gian hiển thị và vào chế độ năng lượng thấp.<br /> <br /> <strong>Cách bật chế độ Expedition trên GPSMAP 66s</strong><br /> <br /> Chuyển đến menu chính của thiết bị> Chọn <strong>Cài đặt</strong> > Chọn "<strong>Expedition"</strong> . Sau đó, bạn sẽ được yêu cầu chọn "<em>Tự động, Nhắc hoặc Không bao giờ</em>".<br /> Chọn <em>Tự động</em> sẽ tự động đặt thiết bị sang chế độ thám hiểm sau hai phút hoạt động.<br /> Chọn <em>Nhắc </em>có nghĩa là lần sau khi bạn tắt thiết bị, nó sẽ yêu cầu bạn bật chế độ thám hiểm thay vì tắt.<br /> Chọn <em>Không bao giờ</em> sẽ tắt bất kỳ hình thức chế độ thám hiểm nào bạn đã chạy (Nhắc hoặc Tự động).<br /> <br /> <strong>Các tính năng phần mềm khả dụng trên cả hai thiết bị</strong><br /> Cả hai thiết bị đều có thể ghi lại các điểm / tuyến đường và nhật ký theo dõi, mặc dù GPSMAP 66s có thể ghi lại nhiều hơn.<br /> <br /> Một số tính năng của cả hai dòng máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính diện tích trên các thiết bị (chỉ cần đi bộ chu vi của khu vực).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tải bản đồ tùy chỉnh - bạn có thể tải bản đồ tùy chỉnh tương thích với các thiết bị của Garmin (Garmin Topo hoặc thậm chí City Nav Maps). Nếu bạn tải một trong hai bản đồ này, thì bạn sẽ có quyền truy cập vào chức năng định tuyến tự động trên thiết bị. * Bạn cần sử dụng bản đồ Topo bản FULL để định tuyến.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Geocaching thân thiện - ứng dụng Geocaching được tải sẵn trên các thiết bị, mặc dù vậy bạn cần phải đăng ký thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lịch săn / cá - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin Mặt trời và Mặt trăng - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng xem ảnh </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Kết nối GARMIN</strong><br /> <br /> Garmin Connect - khả dụng trên cả hai thiết bị cho phép thông tin hoạt động được gửi đến tài khoản kết nối Garmin của bạn và cho phép các tính năng được kết nối với điện thoại thông minh của bạn. Các tính năng được kết nối bao gồm Thông báo điện thoại, LiveTrack, GroupTrack.<br /> <br /> <strong>Chức năng cảm biến</strong><br /> Cả hai thiết bị GPS cầm tay trên đều có thể đo độ cao áp kế, la bàn bù 3 trục nghiêng. Việc đo độ cao áp kế sẽ có thể cung cấp cho bạn thông tin về những thay đổi của điều kiện thời tiết (giả sử bạn vẫn ở cùng độ cao) mặc dù nó cần phải được hiệu chỉnh đầy đủ. Cảm biến này cũng có thể được sử dụng để đo lường thay đổi độ cao của bạn và thậm chí đo lường thay đổi độ dốc AVG khi nhìn vào dữ liệu điểm của bạn.<br /> <br /> <strong>>>> Các tính năng phần mềm CHỈ khả dụng trên GPSMAP 66s:</strong><br /> <br /> - Tương thích với ứng dụng khám phá của Garmin - Sau khi được kết nối với ứng dụng điện thoại thông minh của bạn, ứng dụng khám phá của Garmin sẽ tự động đồng bộ hóa và chia sẻ điểm tham chiếu, tuyến đường và tuyến đường với thiết bị của bạn. Bạn cũng có thể tải bản đồ về điện thoại thông minh của mình để truy cập ngoại tuyến.<br /> <br /> - Theo dõi hoạt động thời tiết <br /> Garmin đã tăng thông tin thời tiết của họ một cách đáng kể với lần lặp này. Bây giờ bạn có thể nhận được rất nhiều dữ liệu thời tiết dựa trên thông tin dự báo thời gian thực. Họ có các tùy chọn bản đồ dự đoán riêng biệt về nhiệt độ, gió, mưa và mây. Nó cũng cung cấp radar thời tiết trực tiếp để bạn sẵn sàng thay đổi kế hoạch nếu bạn sắp bị bắt. Tính năng này không phụ thuộc vào kết nối Bluetooth hoạt động với điện thoại thông minh của bạn có bộ phận tiếp nhận. <br /> Hình ảnh vệ tinh hoạt động chính xác giống như trên loạt GPSMAP 64s nhưng bạn không còn phải trả tiền cho nó nữa.<br /> <br /> - Điểm mới của dòng GPSMAP 66s là khả năng tương thích với cửa hàng Connect Connect của Garmin, về cơ bản là 'App Store' của Garmin. <br /> <br /> - Chức năng InReach Remote: bạn có thể điều khiển thiết bị inReach mini của mình.<br /> <br /> - Đèn pin và SOS <br /> Một tính năng độc đáo khác là <strong>đèn pin LED</strong> rất sáng và<strong> đèn hiệu SOS</strong> có thể được sử dụng để báo hiệu sự giúp đỡ. Chức năng SOS chỉ là một nét khẩn cấp. Tuy nhiên, bạn cũng có thể đặt đèn pin nhấp nháy trong khoảng 1-9 lần mỗi giây.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp.jpg" style="width: 250px; height: 100px;" /><br /> <br /> </span></span>', 'images' => '202408021508551192007d993f13fc9de7ce32bd9bab16.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy định vị GPS cầm tay Garmin', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-28', 'modified' => '2026-07-12', 'status' => '1', 'view' => '27644', 'slug' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '217', 'rght' => '218', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '636', 'name' => 'Máy thuỷ bình kỹ thuật số Leica LS10 và LS15', 'code' => null, 'alias' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span></span>', 'content' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10, LS15 có thể làm việc liên tục nhiều giờ, độ sai lệch gần như tuyệt đối không ảnh hưởng tới độ chính xác kết quả đo.<br /> <br /> Leica LS10, LS15 thường được dùng để đo chênh cao, đo khoảng cách với yêu cầu độ chính xác cao tuyệt đối. Máy có thể dẫn cao độ phục vụ cho vẽ thành lập bản đồ.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> Tính linh hoạt </span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dòng máy thủy bình Leica LS10, LS15 được thiết kế để khảo sát, thực hiện san lấp mặt bằng thường xuyên trên các công trường xây dựng, kiểm tra hoặc giám sát các tòa nhà, đường sắt hoặc đường bộ. Với Leica LS10, LS15 bạn luôn có sẵn công cụ làm việc phù hợp.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác và độ tin cậy cao nhất</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bạn sẽ nhận được kết quả đáng tin cậy và chính xác ngay. Chất lượng quang học hàng đầu của Leica Geystems luôn mang lại hình ảnh có độ tương phản cao và giúp việc đọc chính xác và dễ dàng ngay cả trong điều kiện ánh sáng không thuận lợi. Do sự ổn định nhiệt độ cao, Leica LS10, LS15 luôn mang lại kết quả đáng tin cậy không ảnh hưởng bởi bức xạ mặt trời trực tiếp.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chăm sóc khách hàng chỉ với một cú nhấp chuột.</strong> </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông qua <a href="https://leica-geosystems.com/services-and-support/customer-support-services/active-customer-care">ACTIVE CUSTOMER CARE</a> - một mạng lưới toàn cầu gồm các chuyên gia giàu kinh nghiệm bạn sẽ được hướng dẫn một cách thành thạo mọi vấn đề:<br /> - Loại bỏ sự chậm trễ với dịch vụ kỹ thuật cao cấp<br /> - Hoàn thành công việc nhanh hơn với hỗ trợ tư vấn tuyệt vời<br /> - Tránh các lần truy cập trang web tốn kém với dịch vụ trực tuyến để gửi và nhận dữ liệu trực tiếp từ hiện trườn</span></span>g.<br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cài đặt nhanh chóng và thuận tiện</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả và giảm thời gian làm việc với Leica LS10, LS15. Sử dụng núm lấy nét để cài đặt nhanh chóng. Chuyển động tốt mang lại một hình ảnh hoàn hảo. LS10 & LS15 cung cấp cho bạn một mức độ bảo mật cao!</span></span><br /> <br /> <br /> <iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="394" src="https://www.youtube.com/embed/lBe6-DiokBQ" title="YouTube video player" width="700"></iframe>', 'images' => '20221227151040ffcdeffa3829f4a633ea0b404e2b4a0a.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình Leica', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '26500', 'slug' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '215', 'rght' => '216', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '635', 'name' => 'Ống nhòm và những lưu ý khi mua ống nhòm', 'code' => null, 'alias' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tìm hiểu về ống nhòm và tham khảo một số lưu ý khi chọn ống nhòm!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Ống nhòm là gì?</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm, còn gọi là ống ngắm hay con mắt xa, là một hệ hai kính viễn vọng quang học được gắn cạnh nhau và cùng hướng, cho phép người quan sát đặt cả hai mắt để quan sát các vật ở xa. Cấu tạo gồm vật kính, thị kính và thường có thêm hệ thống lăng kính. Vật kính bao gồm một thấu kính hội tụ, thị kính là thấu kính hội tụ có tiêu cự nhỏ nhất nhưng sẽ làm hình ảnh bị ngược nên cần thêm lăng kính đảo ảnh.<br /> <br /> * Cấu tạo ống nhòm gồm một hệ thống hai thấu kính hội tụ đặt đồng trục.</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vật kính L1: tiêu cự f1 rất dài (vài m)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thị kính L2: tiêu cự f2 ngắn (vài cm) và được sử dụng như kính lúp</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách giữa thị kính và vật kính thay đổi được.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Cấu tạo ống nhòm.png" style="width: 300px; height: 383px;" /><br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Tìm hiểu về các thông số về ống nhòm</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thường ta hay nhìn thấy ký hiệu 7×50, 8×40, 10×42, 15×70, 25×100… ở trên các ống nhòm. Hai chữ số này nói lên điều gì?<br /> <br /> <u>Ví dụ</u>: <span style="color:#000000;"><span style="text-align: justify;">Ống nhòm Nikon MONARCH 7 10x42</span></span><br /> <br /> <strong>10</strong> - số đằng trước dấu nhân (x) sẽ là độ phóng đại của ống nhòm đó (tức là 10 lần).<br /> <strong>42</strong> - số đằng sau dấu nhân sẽ là đường kính của vật kính ống nhòm theo đơn vị millimet ( tức là 42mm).<br /> <br /> Thông số độ phóng đại có nghĩa là bạn sẽ nhìn vật đó gần lại bạn 10 lần theo tỉ lệ xấp xỉ 1/10. Có nghĩa là bạn nhìn một vật xa 1km bằng ống nhòm, thì khi đó như bằng mắt thường bạn nhìn 100m.<br /> <br /> Nhiều bạn hay thắc mắc một câu hỏi khi mua ống nhòm: <strong>ống nhòm này nhìn bao xa?</strong> Thực chất cái xa vô cùng mà mình nói ở đây nó là một vật đủ lớn mà khi nhìn qua ống nhòm chúng ta có thể thấy nó và nhìn được hình dạng của nó. Điều quan trọng mà các bạn hay bỏ quên đó là ”chất lượng ảnh như thế nào?” thì rất ít bạn quan tâm. Đây là điều quan trọng để đánh giá một chiếc ống nhòm tốt hay không?</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường kính vật kính là thông số được tính bằng đơn vị mm. Nếu vật kính càng lớn thì khả năng thu sáng và chất lượng ảnh của bạn sẽ càng tốt và ngược lại. Tuy nhiên nếu mà lớn quá thì một trong những nhược điểm đó là ảnh quan sát thu được sẽ bị sai sắc (là điều không thể tránh khỏi). Bởi vậy khi lựa chọn mua ống nhòm thì các bạn nên chọn sao cho phù hợp với độ phóng đại ống nhòm mà mình mong muốn. Ví dụ 7×50, 8×40, 10×42, 10×50, 12×60, 15×70…</span></span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Xuất xứ tất cả các loại ống nhòm hiện nay</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm hiện nay có ba nguồn gốc xuất xứ chính, đó là tự lực sản xuất sản phẩm, OEM và ODM. Vậy những khái niệm này là gì?</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Những sản phẩm đến từ các thương hiệu tự lực sản xuất có nghĩa là ống nhòm của thương hiệu này được thiết kế và gia công bởi chính một đơn vị. Tuy nhiên hiện nay có khá ít thương hiệu có thể tự lực sản xuất được mà không nhờ bên thứ ba. Đối với những sản phẩm được tự lực sản xuất này thì sẽ mang đậm dấu ấn của thương hiệu và không bị ảnh hưởng bởi các yếu tố kỹ thuật từ các bên. Tuy nhiên những chiếc ống nhòm được tự lực sản xuất có giá thành khá cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm <strong>OEM</strong> là những chiếc ống nhòm được công ty chủ chủ quản thiết kế nhưng lại không trực tiếp gia công, mà phải nhờ đến một bên thứ 3. Đơn vị gia công sẽ hoàn thiện sản phẩm dựa trên bản thiết kế và chịu sự kiểm soát chất lượng từ đơn vị chủ quản thiết kế. Với hình thức này thì sản phẩm thường có giá thành rẻ hơn nhưng về dấu ấn thương hiệu của sản phẩm thì không nổi bật nhiều.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Và hình thức cuối cùng là sản phẩm <strong>ODM</strong>, những sản phẩm ống nhòm thường đến từ các thương hiệu có khả năng kinh doanh nhưng không có khả năng thiết kế hay gia công sản phẩm. Ống nhòm của những thương hiệu này sẽ được đặt thiết kế và gia công ở một đơn vị nào đó và in thương hiệu của mình lên.</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc xác định được nguồn gốc của sản phẩm cũng là cách chọn mua ống nhòm mà bạn nên lưu tâm. Mỗi thương hiệu đều có một ưu nhược điểm riêng, tùy vào nhu cầu bạn có thể lựa phương thức sản xuất phù hợp.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Phân loại các loại ống nhòm hiện nay theo chức năng</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường có rất nhiều loại ống nhòm khác nhau, dưới đây là một số loại ống nhòm phố biến được nhiều người lựa chọn nhất.<br /> - <strong>Ống nhòm mini</strong> là loại ống nhòm có kích thước gọn nhẹ đến bất ngờ, tuy nhiên tầm nhìn thì hơi hạn chế. Loại ống nhòm này có kích thước rất nhỏ nên có thể bỏ trong balo, túi xách để mang theo bên người, trong các chuyên tham quan, thám hiểm, du lịch.<br /> - <strong>Ống nhòm ban đêm</strong> là loại ống nhòm có khả năng nhìn xuyên bóng tối nhờ được trang bị đèn hồng ngoại. Hình ảnh nhìn được trong bóng tối qua ống nhòm hồng ngoại thường không màu. Ngoài ra, loại ống nhòm hồng ngoài ngày còn được tích hợp tích năng ghi hình, chụp ảnh.<br /> - <strong>Ống nhòm chụp ảnh</strong> là loại ống nhòm được tích hợp thêm chức năng bắt lại những khoảnh khắc đẹp khi chúng ta quan sát. Tuy nhiên, vì không phải là thiết bị chuyên về chụp ảnh nên hình ảnh chụp được có chất lượng còn hạn chế.<br /> - <strong>Ống nhòm đo khoảng cách</strong> là loại ống nhòm ngoài việc quan sát một đối tượng thì còn đo được khoảng cách từ chỗ chúng ta đứng đến vật thể. Ngoài ra, loại ống nhòm này còn được tích hợp tính năng đo góc, đo chiều cao<br /> - <strong>Ống nhòm nhiệt</strong> loại ống nhòm hiện đại có khả năng hiển thị thân nhiệt của đối tượng bạn đang quan sát, cũng như phân biệt được đối tượng với môi trường xung quanh nhờ sự chênh lệch nhiệt độ.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Một số lưu ý khi chọn ống nhòm phù hợp với nhu cầu</strong></span></span></h2> <p> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.1 Kích thước ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ống nhòm có kích thước lớn Full-Size (8x42, 10x50)<br /> Các dòng ống nhòm có kích thước lớn thường thu nhận ánh sáng tốt hơn, có thể xem và quan sát trong điều kiện ánh sáng yếu như lúc bình minh hay hoàng hôn. Các ống nhòm này sẽ cung cấp cho bạn cái nhìn rộng lớn về quang cảnh phía trước, thích hợp cho ngắm chim, động vật hoang dã,... nhưng ngược lại kích thước của chúng lại lớn và thường rất nặng.<br /> <br /> - Ống nhòm có kích thước trung bình Mid-Size (7x40, 16x32, 10x42)<br /> Các dòng ống nhòm có kích thước trung bình thường được sử dụng cho ngắm cảnh thiên nhiên, cho các hoạt động du lịch dã ngoại hoặc sử dụng để quan sát các buổi biểu diễn, xem các trận bóng đá,... Ống nhòm này có kích thước vừa phải, khả năng quan sát tốt, trọng lượng phù hợp với mọi người. Tuy nhiên mức độ truyền dẫn ánh sáng lại không được bằng ống nhòm có kích thước lớn.<br /> <br /> - Ống nhòm có kích thước nhỏ gọn - ống nhòm mini (6x18, 8x21)<br /> Các loại ống nhòm này thường thích hợp để sử dụng cho các hoạt động ban ngày. Đây là loại ống nhòm có kích thước nhỏ gọn, cầm vừa tay, thoải mái khi sử dụng trong thời gian dài.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/genmedia_PIC1739447_RL_02_w1500_h1500_c217224230255(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.2 Độ phóng đại của ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi ống nhòm thường được xác định bởi hai cặp số. Số đầu tiên chỉ độ phóng đại của ống nhòm và số thứ 2 thể hiện đường kính vật kính của ống nhòm. Ở đây ta thấy đối với ống nhòm có độ phóng đại lớn hình ảnh quan sát được sẽ càng gần hơn. Tuy nhiên, nếu bạn chọn ống nhòm có độ phóng đại quá lớn, ống nhòm siêu zoom thì kích thước lớn sẽ làm tăng độ rung khi tay bạn cầm không chắc dẫn đến hiện tượng mỏi mắt.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.3 Đường kính ống kính mục tiêu rộng</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giống như độ phóng đại, thông số thứ 2 của ống nhòm là về đường kính ống kính vật kính. Đường kính ống kính càng rộng cho phép tiếp nhận càng nhiều ánh sáng hơn. Khi nhiều ánh sáng bạn sẽ quan sát thấy hình ảnh tươi sáng hơn đặc biệt là trong điều kiện ánh sáng yếu như hoàng hôn hay lúc bình minh.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ong-nhom-hong-ngoai-2-mat-co-ghi-hinh-4x50mm-equinox-z_2253.png" style="width: 420px; height: 329px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.4 Thoát sinh học - Exit Pupil</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ thoát sinh học cho biết ảnh, độ sáng của vật thể khi đang quan sát. Nếu thông số này lớn sẽ làm cho hình ảnh quan sát được rõ nét hơn, tươi sáng hơn. Cách tính toán thông số này bằng cách lấy đường kính phóng đại chia cho độ phóng đại của ống kính. Nếu thông số này nằm ở ngưỡng 7 thì đó là ống kính tốt có thể lựa chọn để quan sát các vật trong ánh trời sáng trăng, lúc ánh sáng yếu, ở ngưỡng 5mm hoặc cao hơn sẽ thích hợp cho quan sát ban ngày hoặc ánh sáng yếu.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.5 Khoảng cách đặt mắt - Relief Eye</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Relief Eye là khoảng cách đặt mắt giữa thị kính tới mắt của bạn sao cho khả năng quan sát tốt nhất thoải mái nhất. Khoảng đặt mắt càng lớn bạn lại càng phải đưa ống nhòm ra xa hơn so với mắt mình, nhưng lại tốt đối với những người đeo kính (đối với những người đeo kính nên chọn thông số này là 11mm hoặc cao hơn).<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.6 Trường nhìn</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trường nhìn là thông số cho phép bạn biết độ rộng khu vực mình muốn quan sát tại khoảng cách 1000m từ nơi bạn đang đứng. Trường nhìn rộng để quan sát thiên nhiên, quan sát động vật, trường nhìn hẹp giúp quan sát các đối tượng ít di chuyển.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/nikon-coolshot-40-i-4(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.7 Hệ thống lấy nét</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm thường được trang bị hệ thống lấy nét ở trung tâm cho cả hai mắt, hoặc điều chỉnh diop trên cả hai mắt. Việc điều chỉnh diop trên hai mắt giúp bù đắp những hạn chế về thị lực giữa hai mắt của bạn.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.8 Lớp phủ thấu kính</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm giá rẻ thường không được tráng phủ nhiều lớp ra vậy cảm giác nhìn qua ống nhòm này thường mờ và không rõ nét. Lớp phủ thấu kính giúp giảm sự phản xạ ánh sáng và tăng khả năng truyền dẫn ánh sáng.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.9 Khả năng chống nước và kháng thời tiết</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng chống nước trên ống nhòm có thể là khả năng chịu nước, khả năng chống thấm, khi sử dụng ở điều kiện thời tiết thay đổi, nhiệt độ thay đổi.<br /> Các loại ống nhòm du lịch thường được trang bị khả năng chống nước mưa, ống nhòm quân sự, ống nhòm hải quân có thể được trang bị thêm khả năng chịu được áp lực nước hoặc nổi trên mặt nước.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.10 Khả năng chống đọng sương</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm giá rẻ thường bị mờ sương khi di chuyển qua lại giữa các vùng có nhiệt độ khác nhau. Mờ sương gây nhiều phiền toái cho bạn, thậm chí có thể làm hỏng ống nhòm nếu không loại bỏ độ ẩm đó ra khỏi ống nhòm.<br /> Hiện nay, các ống nhòm chuyên dụng, ống nhòm cao cấp đã được bơm các loại khí trơ, khí nitor bên trong ống nhòm để tránh gây hiện tượng ngưng tụ hơi nước. Điều này giúp bảo vệ ống nhòm của bạn tránh đọng sương lên bền mặt ống kính.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Địa chỉ mua ống nhòm/ ống nhòm đo khoảng cách uy tín</span></span></h2> <p id="2-dia-chi-mua-thiet-bi-may-bay-khong-nguoi-lai-uav-uy-tin" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại ống nhòm/ ống nhòm đo khoảng cách của các hãng Leica, Nikon, Barska, Garmin, Terrinox, Steiner, SNDWAY, ... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="color: rgb(51, 51, 51); text-align: justify;"> </span><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"> </span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span><br /> ', 'images' => '20210714155415df03af942339bf722676fd2f752f2a1f.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'ống nhòm đo khoảng cách', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-14', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24581', 'slug' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '213', 'rght' => '214', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '634', 'name' => 'Phụ kiện trắc địa', 'code' => null, 'alias' => 'phu-kien-trac-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Phụ kiện trắc địa là gì?</span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hầu hết những phụ kiện trắc địa đều thiết kế có thể tách rời với máy, phòng trong những trường hợp bị hư hỏng, chỉ phải thay thế phụ kiện mới. Điều này khiến cho việc lắp ráp phụ kiện cũng như sử dụng các máy trắc địa được linh hoạt với mọi trường hợp.<br /> Phụ kiện đo đạc, trắc địa bao gồm nhiều loại khác nhau ứng dụng cho các thiết bị đo đạc ( máy thủy bình, máy kinh vĩ điện tử, máy toàn đạc điện tử, máy định vị GPS) như: thước thép, bật mực, đế dọi tâm, thước đẩy bánh xe, mốc sứ, thùng máy, gương sào, đế dọi tâm, chân mia, dây cáp, pin sạc,…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/PHỤ KIỆN TRẮC ĐỊA(2).png" style="width: 680px; height: 544px;" /></span></span></p> <p style="text-align: center;"> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lưu ý khi lựa chọn phụ kiện trắc địa</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải đảm bảo phù hợp với cấu tạo của máy, chức năng của máy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải cùng hãng sản xuất hoặc phải là sản phẩm chính hãng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải phù hợp với công suất của máy, tránh trường hợp chọn phụ kiện có công suất thấp hoặc lớn hơn công suất thực của máy gây hư hỏng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải có cấu tạo tính năng tương đồng với từng đời máy</span></span></li> </ul> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Phụ kiện máy(2).jpg" style="width: 620px; height: 803px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Địa chỉ mua phụ kiện trắc địa uy tín</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại phụ kiện trắc địa: chân máy toàn đạc, chân máy thủy bình, mia 5m, mia Invar, sào gương, pin máy toàn đạc, sạc pin máy toàn đạc, đế máy, cáp trút số liệu,... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> </span><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 145 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"> </span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span></span></span>', 'images' => '20211207150823dc9ff8b8d2712352c76fd4e56030baca.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Phụ kiện trắc địa', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-12', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24887', 'slug' => 'phu-kien-trac-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '211', 'rght' => '212', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '632', 'name' => 'Một số lưu ý khi chọn mua máy bộ đàm', 'code' => null, 'alias' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng chúng tôi tham khảo một số lưu ý để lựa chọn cho mình một chiếc bộ đàm phù hợp nhé!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Lựa chọn băng tần sử dụng</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm cầm tay và máy bộ đàm cố định có 2 loại băng tần là VHF (136 – 174MHz) và UHF (400 – 527MHz).<br /> <br /> Nếu mua thêm để dùng chung với máy có sẵn, phải xác định máy bộ đàm đang dùng là loại băng tần nào (VHF hay UHF) và model là gì. Trong trường hợp đây là lần đầu tiên mua bộ đàm và chỉ có nhu cầu dùng chúng với nhau thì người dùng có thể chọn loại băng tần nào cũng được. Tùy thuộc vào địa hình, khu vực sử dụng và để đảm bảo liên lạc xa nhất, tốt nhất bạn nên chú ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ở vị trí khu vực trống trải, ít vật cản nên chọn băng tần VHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại khu vực nhà cao tầng, nhiều công trình dân dụng, trong thành phố nên chọn tần số UHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cũng cần lưu ý đến khả năng được cấp phép sử dụng tần số tại vùng sử dụng bộ đàm.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Lưu ý:</strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách liên lạc tối đa giữa hai máy cầm tay tại khu vực trống trải là khoảng 3km, trong thành phố không quá 2km. Những vị trí càng đông dân cư, càng nhiều công trình kiến trúc. Mật độ dân cư đông thì cự ly sẽ rút ngắn lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ đàm cầm tay có thể liên lạc với trung tâm của mình ở cự ly xa hơn so với cự ly giữa 2 máy cầm tay. Điều kiện là máy tại trung tâm phải có công suất lớn. Và anten đặt trên cột cao (càng cao thì liên lạc càng xa).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu muốn tăng cự li liên lạc giữa các máy với nhau, có thể chọn dùng Repeater (Bộ lặp) với anten lắp trên cao.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><img alt="" src="/admin/webroot/upload/image/images/1534383704-bodam_02.jpg" style="width: 480px; height: 360px;" /></strong></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Lựa chọn dòng máy phù hợp</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tùy thuộc vào khả năng tài chính cũng như nhu cầu mà lựa chọn dòng máy phù hợp. Trên thị trường hiện nay có khá nhiều thương hiệu máy bộ đàm. Nổi bật hơn cả là các dòng máy đến từ thương hiệu Motorola, Icom và Kenwood. Các dòng sản phẩm khác được đánh giá là có độ bền kém hơn, chất lượng thu phát cũng không tốt bằng.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu dùng cho công trường xây dựng hay dịch vụ bảo vệ thì nên chọn loại có cấu hình trung bình. Motorola CP1100, CP1300, GP3188 loại không bàn phím với khả năng kháng nước, chống bụi, chống va đập tốt là một gợi ý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các công ty vận tải, vận chuyển hàng hóa/hành khách…thì có thể chọn máy bộ đàm gắn xe cố định như Motorola GM3188, GM338. Nếu công ty yêu cầu đảm bảo quản lý liên lạc tại nhiều khu vực địa lý có khoảng cách xa thì phải chọn dòng máy kĩ thuật số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Với bộ đàm dùng cho nhà hàng, khách sạn, khu công nghiệp thì nên chọn dòng máy bộ đàm cầm tay giá rẻ như Motorola MagOne A8, GP2000s, Kenwood TK-2107 hay Icom IC-F3003 đều được.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các đơn vị chuyên nghiệp mà yêu cầu sản phẩm cần phải đảm bảo an ninh để liên lạc thông suốt kể cả trong điều kiện thời tiết khắc nghiệt, môi trường phức tạp như Công an, Bộ đội, phục vụ công tác Phòng chống thiên tai, bão lũ, các công ty dầu khí…bộ đàm được lựa chọn phải là dòng chuyên nghiệp, chuyên dụng và hiệu suất cao\</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm phổ thông có giá thành tương đối rẻ, cấu hình vừa đủ đáp ứng những yêu cầu đơn giản. Vừa hài hòa về chi phí, vừa mang lại hiệu quả công việc. Trong khi đó, các dòng sản phẩm chuyên nghiệp thường có mức giá cao hơn với nhiều tính năng hơn.<br /> <br /> Có thể nói, dòng sản phẩm máy bộ đàm đến từ thương hiệu Motorola hiện đang đứng đầu về công nghệ (cả analog và digital). Nhờ vào ưu điểm là độ bền cao, khả năng chống chịu tốt cũng như cách vận hành đơn giản. Các dòng sản phẩm chuyên dụng có thể kể đến như Motorola GP3188, GP328, XiR P8200/8208, P8260/8268…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/business-radios-2021.png" style="width: 480px; height: 238px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2 style="box-sizing: border-box; margin-top: 0px; margin-bottom: 0.5rem; font-weight: 500; line-height: 1.2; font-size: 20px; color: rgb(68, 68, 68); font-family: Roboto, sans-serif;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; font-weight: 600;">3. Lựa chọn máy bộ đàm với những tính năng phù hợp</span></span></span></h2> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát RF: Máy cầm tay thường có công suất tối đa khoảng 5W, con số này càng cao thì cự ly liên lạc càng lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất âm thanh: Nếu sử dụng trong môi trường ồn ào, nhiều tiếng động. Thì nên chọn máy công suất lớn có bộ lọc âm thanh tốt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các tính năng bảo vệ: Máy được thiết kế với kết cấu vững chắc, theo tiêu chuẩn quân đội Mỹ (MIL-STD810), chống nước, chống nổ…</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mạch mã hóa và giải mã PL/DPL, CTCSS/DTCS: Tránh được những cuộc liên lạc không cần thiết khi nhiều người dùng chung 1 kênh tần số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng kích phát bằng giọng nói (VOX) để hoạt động khi rảnh tay</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng nhập tần số từ bàn phím của máy: Thường được trang bị ở các dòng máy phổ thông. Tuy vậy, tính năng này lại khiến người dùng vô tình làm sai tần số kênh đã đặt ra khiến máy bộ đàm không liên lạc được với máy khác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng bảo mật thông tin: Nhiều cấp bảo mật khác nhau như Voice Scramler, AES/DES…</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/MotorolaG3588.jpg" style="width: 480px; height: 480px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Chọn phụ kiện bộ đàm</strong></span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin bộ đàm</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên chọn pin dung lượng lớn, thời gian sử dụng lâu cho mỗi lần sạc. Pin cho máy bộ đàm nên từ 1000mAh – 2200mAh với thời gian hoạt động tối đa đến 19 giờ.<br /> Pin Li-Ion có dung lượng lớn và tuổi thọ pin cao có thể sạc bất cứ lúc nào mà không cần dùng hết trước khi sạc như các loại pin khác. Pin Ni-MH có dung lượng và tuổi thọ pin thấp hơn Li-Ion. Muốn pin sử dụng bền lâu thì không thể sạc nhồi mà phải dùng hết trước khi sạc lại. Trong trường hợp dùng lâu, để tránh bị hết pin bất ngờ, hãy mua thêm pin dự phòng để đảm bảo liên lạc được thông suốt.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ sạc</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu không có thời gian sạc pin lâu, hãy sử dụng bộ sạc nhanh, nhanh hơn bộ sạc chuẩn từ 3-5 giờ.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Loa – Micro và các loại tai nghe choàng đầu, áp cổ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo liên lạc kể cả khi đeo máy thường xuyên ở thắt lưng, trên cầu vai/gắn trên cổ áo. Phù hợp với những ai thường xuyên dùng tay cho những công việc khác như bảo an, nhân viên phục vụ…<br /> Tai nghe choàng đầu và bộ áp cổ khi dùng với máy có chức năng kích phát bằng giọng nói (VOX) sẽ giúp rảnh tay hoàn toàn khi liên lạc bằng bộ đàm. Bộ áp cổ sẽ giúp âm thanh gửi đi trong hơn, không có tiếng ồn kể cả khi đang nói trong khu vực nhiều tiếng ồn.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm của mỗi hãng khác nhau đều kèm theo anten tiêu chuẩn, cho cự li liên lạc tốt nhất. Loại cải tiến kích có thước ngắn hơn giúp máy gọn và đỡ vướng víu. Anten không phù hợp có thể làm hư hỏng máy. Do vậy, nếu cần một anten mới, hãy chọn đúng mã số của loại kèm theo máy.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/bo-dam-motorola-gp-3588-plus(1).jpg" style="width: 480px; height: 270px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ mua máy bộ đàm uy tín</span></span></h2> <p> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên phân phối các loại máy bộ đàm của các hãng Motorola, Kenwood, Icom, Hypersia,... lâu năm uy tín trên toàn quốc.</span></p> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> <span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span></span></span><br style="margin: 0px; padding: 0px;" /> </p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">@ Luôn đồng hành cùng bạn!</strong><span style="margin: 0px; padding: 0px;"> </span></span></span></p> ', 'images' => '20210709160653d0336e3b94fd76fc2ef669058d11917a.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'máy bộ đàm', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-09', 'modified' => '2026-07-12', 'status' => '1', 'view' => '15419', 'slug' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '209', 'rght' => '210', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $detailNews = array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $setting = array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ) $tin_ft = array( (int) 0 => array( 'Post' => array( 'id' => '588', 'name' => 'Hướng dẫn mua hàng', 'code' => null, 'alias' => 'huong-dan-mua-hang', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p> <span style="color:#000000;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> </span></span><span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="line-height: 107%;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></span></span> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="color:#000000;">Quý khách có thể mua hàng theo những cách sau:</span></span></span><br /> </p> <p> <span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Cách 1: </strong>Đặt hàng trực tiếp tại mục ĐẶT HÀNG (Thêm vào giỏ hàng) trên website: </span></span><span style="font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><a href="https://maytracdiasaoviet.vn/" target="_blank"><span style="color:#000000;">https://tracdiathanhdat.vn/</span></a></span></span><span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;">.</span></span></p> <p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngay sau khi tiếp nhận thông tin đặt hàng, nhân viên kinh doanh công ty sẽ gọi điện cho quý khách để xác nhận đơn hàng và tiến hành giao hàng cho quý khách ngay trong ngày.</span></span></span></p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Cách 2: </strong>Đặt hàng trực tiếp qua số hotline của công ty <br /> <br /> – Tại trụ sở Hà Nội: <strong>0913 051 734 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">– Tại VPGD Hồ Chí Minh:<strong> 0904 925 936 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Cách 3: </strong>Quý khách mua hàng trực tiếp tại địa chỉ sau:<br /> <br /> <strong>CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></span></span></span><br /> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 145 Láng Hạ, Phường Láng Hạ, Hà Nội</span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> </div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rất mong được hợp tác với Quý khách hàng trên cả nước.<br /> <br /> Trân trọng!</span></span></span></div> ', 'images' => '202104071220058398ebc1b9cf669cf602eb8040be387a.jpg', 'images_multi' => '', 'pos' => '1', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Máy trắc địa chính hãng | RTK GNSS, máy toàn đạc, máy thủy bình – Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy RTK GNSS, máy toàn đạc, máy thủy bình, GPS cầm tay chính hãng. Tư vấn kỹ thuật – giao hàng toàn quốc. Trắc địa Thành Đạt – 0913 051 734', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '4244', 'slug' => 'huong-dan-mua-hang', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '143', 'rght' => '144', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '586', 'name' => 'Chính sách thanh toán', 'code' => null, 'alias' => 'chinh-sach-thanh-toan', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> <!--[if !supportLineBreakNewLine]--><!--[endif]--></span> </span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chúng tôi c</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">hấp nhận các hình thức thanh toán bằng tiền mặt, chuyển khoản theo đúng quy định pháp luật. </span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (22).png" style="width: 320px; height: 183px;" /></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Quý khách có thể chọn các phương thức thanh toán sau đây:</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">I. Thanh toán trực tiếp tại cửa hàng<br /> <br /> II. Thanh toán qua hình thức chuyển khoản</span></strong><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Thông tin tài khoản:</span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <strong style="color: rgb(0, 0, 0); margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"><em>Chủ tài khoản</em>: CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></p> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em style="margin: 0px; padding: 0px;"><strong>Số tài khoản</strong></em><em style="margin: 0px; padding: 0px;">: <strong>0611001648635</strong> tại Ngân hàng TMCP Ngoại thương Việt Nam, chi nhánh Ba Đình<br /> <br /> <strong>Nội dung chuyển khoản</strong>: Tên công ty - Thông tin sản phẩm đã mua – Số điện thoại người chuyển tiền</em></span></span></span><br /> <br /> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Sau khi chuyển khoản hãy thông báo lại cho chúng tôi để chúng tôi kiểm tra và xác nhận lại cho Quý khách.</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">III. Thanh toán khi nhân viên đến giao nhận hàng</span></strong></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66);"> <span style="color:#000000;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">Quý khách hàng thanh toán trực tiếp bằng tiền mặt cho nhân viên giao hàng của chúng tôi ngay khi kiểm tra và nhận hàng.<br /> <br /> Mọi phản hồi và thắc mắc về việc thanh toán, Quý khách liên hệ <strong>0942 288 388</strong> để được tư vấn.</span></font><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span></span></p> ', 'images' => '20210407122232bf3e6d52a68ca60f97fc6048b14e4acc.jpg', 'images_multi' => '', 'pos' => '2', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3881', 'slug' => 'chinh-sach-thanh-toan', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '139', 'rght' => '140', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '587', 'name' => 'Chính sách vận chuyển', 'code' => null, 'alias' => 'chinh-sach-van-chuyen', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><span style="font-family:verdana,geneva,sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></strong><br /> <br /> Chúng tôi hỗ trợ giao hàng toàn quốc cho Quý khách mua hàng tại hệ thống cửa hàng của chúng tôi.</span></span><br /> </div> <div> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">Sau khi nhận được thông tin đặt hàng chúng tôi sẽ lập tức xử lý đơn hàng và phản hồi lại thông tin cho khách hàng về việc thanh toán và giao nhận.<br /> <br /> <strong>> Thời gian giao hàng </strong><br /> <br /> - Trong vòng 24 giờ nếu địa điểm giao hàng <b style="color: rgb(74, 74, 74); box-sizing: border-box;">≤ 20 km</b> tính từ cửa hàng của chúng tôi.</span></span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Trong vòng 1-2 ngày nếu địa điểm giao hàng nằm trong phạm vi <b style="box-sizing: border-box">50 - 100 km</b> </span></span><span style="font-family: Arial, sans-serif;"><o:p></o:p></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">tính từ cửa hàng của chúng tôi.<br /> <br /> - Trong vòng 3-5 ngày</span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> nếu địa điểm giao hàng từ <strong>20</strong></span><b style="font-family: tahoma, geneva, sans-serif; font-size: 14px; box-sizing: border-box;">0 km</b><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> trở lên </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">tính từ cửa hàng của chúng tôi.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trước khi vận chuyển, bộ phận giao nhận sẽ liên lạc với Quý khách hàng để xác nhận khoảng thời gian và địa điểm giao hàng cụ thể.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">> Phí vận chuyển</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> sẽ được tính theo từng giá trị đơn hàng và được thoả thuận giữa hai bên ngay trước khi giao hàng. </span></p> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px;">Mọi thắc mắc liên quan đến việc giao hàng, Quý khách hàng liên hệ số điện thoại <strong>0942 288 388</strong> để được giải đáp và giải quyết kịp thời.<br /> <br /> Trân trọng!</span></span></span></p> </div> ', 'images' => '20210407122135505ddef64809ce7ee5f9db7cfdfd3e2e.jpg', 'images_multi' => '', 'pos' => '3', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3923', 'slug' => 'chinh-sach-van-chuyen', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '141', 'rght' => '142', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '585', 'name' => 'Chính sách đổi trả', 'code' => null, 'alias' => 'chinh-sach-doi-tra', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Chúng tôi hỗ trợ đổi trả sản phẩm trong vòng 07 ngày nếu lỗi phát sinh do nhà sản xuất.<br /> <br /> Trong thời gian đổi trả, Công ty CP Công nghệ và Thương mại Thành Đạt sẽ hỗ trợ cung cấp máy móc thay thế kịp thời để công việc khảo sát, đo đạc của Quý khách không bị gián đoạn. Chi phí vận chuyển cho việc đổi trả do hai bên tự thoả thuận.</span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">> Điều kiện đổi trả: </span></span></strong></span><br /> <ul> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm phải còn nguyên tem mác.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm bị lỗi do nhà sản xuất.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm không đúng như đơn đặt hàng.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lần đổi trả cho 1 sản phẩm là 1 lần</span></span></span></li> </ul> <br /> <div style="text-align: start;"> <span style="color:#000000;"><strong><span style="text-align: justify;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">> </span></font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Việc đổi trả sẽ không được chấp nhận nếu:</span> <span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"> </span></span></strong></span></div> <ul> <li> <span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Trong quá trình sử dụng sản phẩm Quý khách không tuân thủ các chỉ dẫn của Nhà sản xuất.</span></span></li> <li> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="text-align: justify;">S</span>ản phẩm bị trầy xước, không nguyên vẹn</span></span></span></li> </ul> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, chúng tôi cũng hỗ trợ đổi trả sản phẩm vì lý do chủ quan của Quý khách hàng ( muốn đổi sang sản phẩm cùng chủng loại nhưng khác về màu sắc, hãng sản xuất hay thông số kỹ thuật). Chi phí cho việc đổi trả này do Quý khách hàng chịu.</span></span><br /> <br /> <span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"><img alt="" src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/lien-he.jpg" style="margin: 0px; padding: 8px 0px; height: 36px; max-width: 100%; vertical-align: middle; border: 0px; opacity: 1; font-size: 13px; width: 38px;" /><span style="margin: 0px; padding: 0px; font-size: 13px;"> </span></strong></span></span><span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"> </strong></span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Liên hệ hotline <strong>0913 051 734</strong> để được tư vấn đổi trả theo đúng qui định.</span></span>', 'images' => '202104071223177d9b7f6e319f9fa90078c7c61ed9bd19.jpg', 'images_multi' => '', 'pos' => '4', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3915', 'slug' => 'chinh-sach-doi-tra', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '137', 'rght' => '138', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '583', 'name' => 'Chính sách bảo hành', 'code' => null, 'alias' => 'chinh-sach-bao-hanh', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="color: rgb(66, 66, 66); text-align: justify;">Tất cả các sản phẩm mua tại hệ thống cửa hàng của chúng tôi đều được bảo hành chính hãng theo quy định của nhà sản xuất. </span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(66, 66, 66); text-align: justify;">Chúng tôi hỗ trợ kỹ thuật 24/7 qua số hotline <strong>0913 051 734</strong> trong suốt quá trình Quý khách sử dụng sản phẩm.</span></span></span></div> <div> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">1. Sản phẩm được bảo hành miễn phí: </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm sẽ được bảo hành miễn phí nếu sản phẩm đó còn thời hạn bảo hành (được tính kể từ ngày mua hàng).</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Thời hạn bảo hành được ghi trên Tem Bảo Hành và theo quy định của từng Nhà sản xuất đối với tất cả các sự cố về mặt kỹ thuật.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Có Tem bảo hành trên sản phẩm.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi sản phẩm có sự cố kĩ thuật chúng tôi sẽ trực tiếp khắc phục sự cố tại cửa hàng hoặc thay mặt khách hàng mang sản phẩm tới Trung Tâm Bảo Hành của hãng.</span></span></li> </ul> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">2. Những trường hợp không được bảo hành (sửa chữa có tính phí): </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm đã quá thời hạn bảo hành hoặc không có Tem bảo hành trên máy.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hư hỏng do tác động cơ học làm rơi, vỡ, va đập, trầy xước, móp méo, ẩm ướt, hoen rỉ, chảy nước hoặc do hỏa hoạn, thiên tai gây nên.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hỏng do sử dụng không đúng cách, sử dụng sai điện áp quy định.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Tự ý tháo dỡ, sửa chữa sản phẩm</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span><br /> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"> </span></span></div> ', 'images' => '20210407123801c4049edabae0c54e2347c82e21413ec3.jpg', 'images_multi' => '', 'pos' => '5', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3646', 'slug' => 'chinh-sach-bao-hanh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '133', 'rght' => '134', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '584', 'name' => 'Chính sách bảo mật thông tin', 'code' => null, 'alias' => 'chinh-sach-bao-mat-thong-tin', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">1. Mục đích thu nhập thông tin cá nhân</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51);">Thông tin cá nhân mà chúng tôi thu thập bao gồm: họ tên, địa chỉ giao hàng, địa chỉ email, số điện thoại cố định, số điện thoại di động, cookies.</span></p> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Đối với các giao dịch thanh toán qua cổng thanh toán trực tuyến, Chúng tôi không lưu trữ thông tin số tài khoản, số thẻ ngân hàng của khách hàng, những thông tin này sẽ được cổng thanh toán lưu trữ để phục vụ việc đối soát giao dịch.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân khách hàng sẽ được sử dụng cho một hoặc tất cả các mục đích sau đây:</span></span></span></span> <ul style="margin: 0px; padding: 0px 0px 0px 15px;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Giao hàng cho quý khách đã mua hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông báo về việc giao hàng và hỗ trợ khách hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Cung cấp thông tin liên quan đến sản phẩm</span></span></span></span></li> </ul> </li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoài ra, chúng tôi sẽ sử dụng thông tin của quý khách cung cấp để hỗ trợ quản lý tài khoản khách hàng (nếu có); xác nhận và thực hiện các giao dịch tài chính liên quan đến các khoản thanh toán trực tuyến của quý khách;</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi không được phép thu nhập thông tin nếu khách hàng không tự nguyện, cũng không sử dụng phương thức thu thập thông tin khách hàng bằng các hình thức bất hợp pháp.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">2. Phạm vi sử dụng thông tin</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân thu thập được sẽ chỉ được sử dụng trong nội bộ công ty.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể chia sẻ tên và địa chỉ của quý khách cho dịch vụ chuyển phát nhanh có uy tín để giao hàng cho quý khách theo cam kết.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">3. Thời gian lưu trữ thông tin</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">Thông tin khách hàng được lưu trữ nội bộ cho đến khi có yêu cầu xóa thông tin từ phía khách hàng.</span></p> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Những người hoặc tổ chức có thể được tiếp cận với thông tin </span></span></h2> <br /> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng được tiếp cận với thông tin cá nhân của khách hàng thuộc một trong những trường hợp sau:</span></span><br /> </div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Nhân viên của Công ty Cổ phần Công nghệ và thương mại Thành Đạt</span></span></div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Các đối tác có ký hợp đồng thực hiện 1 phần dịch vụ của Công ty. Các đối tác này sẽ nhận được những thông tin theo thỏa thuận hợp đồng (có thể 1 phần hoặc toàn bộ thông tin tuy theo điều khoản hợp đồng) để tiến hành hỗ trợ người dùng sử dụng dịch vụ do Công ty cung cấp.</span></span></div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ của đơn vị thu thập và quản lý thông tin</span></span></h2> <div style="text-align: justify;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(bao gồm cách thức liên lạc để người tiêu dùng có thể hỏi về hoạt động thu thập, xử lý thông tin liên quan đến cá nhân mình)</span></span></em></div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ của đơn vị thu thập và quản lý thông tin:</span></span><br /> </div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Công ty Cổ phần Công nghệ và thương mại Thành Đạt </span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Địa chỉ: số 157 phố Đặng Văn Ngữ, P. Phương Liên, Q. Đống Đa, Tp. Hà Nội</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Điện thoại: 0243 7764930</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Email: tracdiathanhdat@gmail.com<span style="white-space: pre;"> </span></span></span></strong></div> </div> </div> <p style="text-align: justify;"> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Người dùng có thể gọi điện tới tổng đài hỗ trợ và chăm sóc khách hàng </span><strong style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify; margin: 0px; padding: 0px;">0949 322 456</strong><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để điều chỉnh hoặc xóa đi dữ liệu cá nhân của mình.</span><br /> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">6. Cam kết bảo mật thông tin cá nhân khách hàng</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Không bán, chia sẻ hay trao đổi thông tin cá nhân của khách hàng thu thập trên trang web cho một bên thứ ba nào khác.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoại trừ các trường hợp về sử dụng thông tin cá nhân như đã nêu trong chính sách này,chúng tôi cam kết không tiết lộ thông tin cá nhân của bạn ra ngoài. Trong một số trường hợp, chúng tôi có thể thuê một đơn vị độc lập để tiến hành các dự án nghiên cứu thị trường và khi đó thông tin của bạn sẽ được cung cấp cho đơn vị này để tiến hành dự án. Bên thứ ba này sẽ bị ràng buộc bởi một thỏa thuận về bảo mật mà theo đó họ chỉ được phép sử dụng những thông tin được cung cấp cho mục đích hoàn thành dự án.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể tiết lộ hoặc cung cấp thông tin cá nhân của bạn trong các trường hợp thật sự cần thiết như sau: (a) khi có yêu cầu của các cơ quan pháp luật; (b) trong trường hợp mà chúng tôi tin rằng điều đó sẽ giúp chúng tôi bảo vệ quyền lợi chính đáng của mình trước pháp luật.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">7. Thay đổi về chính sách</span></span></span></span></h2> <p style="text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Nội dung của “Chính sách bảo mật” này có thể thay đổi để phù hợp với các nhu cầu của Công Ty CP Công nghệ và Thương Mại Thành Đạt cũng như nhu cầu và sự phản hồi từ khách hàng (nếu có). </span></span></span></span></p> </div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi hiểu rằng quyền lợi của bạn trong việc bảo vệ thông tin cá nhân cũng chính là trách nhiệm của chúng tôi nên trong bất kỳ trường hợp có thắc mắc, góp ý nào liên quan đến chính sách bảo mật, việc thông tin cá nhân bị sử dụng sai mục đích vui lòng liên hệ qua số điện thoại <strong>0949 322 456</strong> hoặc gửi phản hồi về địa chỉ email: <em><strong>tracdiathanhdat@gmail.com.</strong></em><br /> <br /> Trân trọng!</span></span></div> ', 'images' => '202104071236589b665b2accf17da9077cea4c5dad8e94.jpg', 'images_multi' => '', 'pos' => '6', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3920', 'slug' => 'chinh-sach-bao-mat-thong-tin', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '135', 'rght' => '136', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) ) $slideshow = array( (int) 0 => array( 'Slideshow' => array( 'id' => '1158', 'name' => '', 'images' => '202607021457295d6b626c7966fea8ed15b90188f75e84.png', 'created' => '2026-07-02 14:57:29', 'modified' => '2026-07-02 14:57:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 1 => array( 'Slideshow' => array( 'id' => '1157', 'name' => '', 'images' => '20260630144106967d7220891508e0bc589157b72a4a6f.png', 'created' => '2026-06-30 14:41:06', 'modified' => '2026-06-30 14:41:06', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 2 => array( 'Slideshow' => array( 'id' => '1156', 'name' => '', 'images' => '20260627100900c4525d4b0ad85bb7ed6e5f31fbe008ce.png', 'created' => '2026-06-27 10:09:00', 'modified' => '2026-06-27 10:09:00', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 3 => array( 'Slideshow' => array( 'id' => '1153', 'name' => '', 'images' => '2026060910315463c4488ef0eebcd97a80c7be838ec857.png', 'created' => '2026-06-09 10:31:54', 'modified' => '2026-06-09 10:31:54', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 4 => array( 'Slideshow' => array( 'id' => '1151', 'name' => '', 'images' => '20260505105747cef035cfde3d3e4fc486dcc70906dab9.png', 'created' => '2026-05-05 10:57:47', 'modified' => '2026-05-05 10:57:47', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 5 => array( 'Slideshow' => array( 'id' => '1147', 'name' => '', 'images' => '20260504151401463305739b212edcd50d4df28ea21663.png', 'created' => '2026-05-04 15:14:01', 'modified' => '2026-05-04 15:14:01', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 6 => array( 'Slideshow' => array( 'id' => '1111', 'name' => '', 'images' => '2025091214412921cbc3cbc42d3d64fe4364ad8b7a9b7e.png', 'created' => '2025-09-12 14:41:29', 'modified' => '2025-09-12 14:41:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 7 => array( 'Slideshow' => array( 'id' => '1099', 'name' => '', 'images' => '20250707100715baf5ecd84c6a8766519b98f66eec1511.png', 'created' => '2025-07-07 10:07:15', 'modified' => '2025-07-07 10:07:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 8 => array( 'Slideshow' => array( 'id' => '1096', 'name' => '', 'images' => '202504251616158fbd912c821051db2e9e1ebe215c4da4.png', 'created' => '2025-04-25 16:16:15', 'modified' => '2025-04-25 16:16:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 9 => array( 'Slideshow' => array( 'id' => '1055', 'name' => '', 'images' => '202502071107533894de97e081b06e5749a83e6bed2399.png', 'created' => '2025-02-07 11:07:53', 'modified' => '2025-02-07 11:07:53', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 10 => array( 'Slideshow' => array( 'id' => '1008', 'name' => '', 'images' => '20240822084848c3089726a8fff539a5f1adcaaca9cd73.png', 'created' => '2024-08-22 08:48:48', 'modified' => '2024-08-22 08:48:48', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 11 => array( 'Slideshow' => array( 'id' => '961', 'name' => '', 'images' => '202403121029063cfd7328162ff668a881f7e275a1a01d.png', 'created' => '2024-03-12 10:29:08', 'modified' => '2024-03-12 10:29:08', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 12 => array( 'Slideshow' => array( 'id' => '850', 'name' => '', 'images' => '20230605160932d4a880ffcab96141d7a3538bf17255de.png', 'created' => '2023-06-05 16:09:33', 'modified' => '2023-12-25 09:27:46', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 13 => array( 'Slideshow' => array( 'id' => '817', 'name' => '', 'images' => '20230306160629b7490cbbbd5cfd081d8ec1930914a677.png', 'created' => '2023-03-06 16:06:29', 'modified' => '2025-12-23 09:03:28', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 14 => array( 'Slideshow' => array( 'id' => '617', 'name' => '', 'images' => '20220713143712ec1e28dc996e7d39d7535a730ead176e.png', 'created' => '2022-07-13 14:37:12', 'modified' => '2024-12-02 16:11:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ) ) $adv_khuyenmai = array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ) $doitac = array( (int) 0 => array( 'Advertisement' => array( 'id' => '36', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/bosch', 'images' => '20151223081939be7f9ca66f2fb4e760fb991d89d74002.png', 'display' => '3', 'created' => '2015-12-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '33', 'rght' => '34' ) ), (int) 1 => array( 'Advertisement' => array( 'id' => '33', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/pentax', 'images' => '20151216094854d7903c4f5ae6da9780bc88cbb048d417.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '27', 'rght' => '28' ) ), (int) 2 => array( 'Advertisement' => array( 'id' => '16', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/topcon', 'images' => '2015121609180430293457191c29e0d0d7a715d26041bd.png', 'display' => '3', 'created' => '2015-12-10', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '7', 'rght' => '8' ) ), (int) 3 => array( 'Advertisement' => array( 'id' => '27', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/trimple', 'images' => '2015121609470060450f77189189cce8edb27ef59c46d2.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '15', 'rght' => '16' ) ), (int) 4 => array( 'Advertisement' => array( 'id' => '28', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20151216094709d0c1b1d5ffcc17a598904261de69c485.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '17', 'rght' => '18' ) ), (int) 5 => array( 'Advertisement' => array( 'id' => '29', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/kenwood', 'images' => '201512160947288286f4b931bdbc0e64dfd484fc6c12e5.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '19', 'rght' => '20' ) ), (int) 6 => array( 'Advertisement' => array( 'id' => '30', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/nikon', 'images' => '202210171542300b1b7918f461a4dd8d877236543412d8.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '21', 'rght' => '22' ) ), (int) 7 => array( 'Advertisement' => array( 'id' => '34', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sincon', 'images' => '20151216095020f699fb43b225af9cb76ffe022e057faf.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '29', 'rght' => '30' ) ), (int) 8 => array( 'Advertisement' => array( 'id' => '31', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/garmin', 'images' => '201512160948147d3b76212a8ebdd03d45fc49a95a9868.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '23', 'rght' => '24' ) ), (int) 9 => array( 'Advertisement' => array( 'id' => '26', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/leica', 'images' => '20151216094654c3a83e015935188821aa9ee65e6b322f.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '13', 'rght' => '14' ) ), (int) 10 => array( 'Advertisement' => array( 'id' => '25', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sokkia', 'images' => '2015121609464772166f729226cebe52ae986c2699c3a1.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '11', 'rght' => '12' ) ), (int) 11 => array( 'Advertisement' => array( 'id' => '24', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/foif', 'images' => '2015121609482733afba0b93b9383e6ea26a08124e8a76.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '9', 'rght' => '10' ) ), (int) 12 => array( 'Advertisement' => array( 'id' => '54', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424094203a24f4d5a812351010a6355d888b944ec.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '57', 'rght' => '58' ) ), (int) 13 => array( 'Advertisement' => array( 'id' => '55', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '2021042409421996a13aed03c03b49b7d965db5dbcfdd6.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '59', 'rght' => '60' ) ), (int) 14 => array( 'Advertisement' => array( 'id' => '56', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/motorola', 'images' => '20220805103835e45b76131731a737df5e8dec49916375.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '61', 'rght' => '62' ) ), (int) 15 => array( 'Advertisement' => array( 'id' => '57', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/yamayo', 'images' => '20250304144532ee8e939d0c9e884e1a50ad352b272730.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2025-03-04', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '63', 'rght' => '64' ) ), (int) 16 => array( 'Advertisement' => array( 'id' => '58', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424100013ce6e6d048914eccdc312d53e64e566b7.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '65', 'rght' => '66' ) ), (int) 17 => array( 'Advertisement' => array( 'id' => '59', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/geomax', 'images' => '2021051416090922e7bec3a6dfe8041780aa125f5f4932.jpg', 'display' => '3', 'created' => '2021-05-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '67', 'rght' => '68' ) ), (int) 18 => array( 'Advertisement' => array( 'id' => '60', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/south', 'images' => '20210623100351b1da5960a28a9deb6af4e028880d625b.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '69', 'rght' => '70' ) ), (int) 19 => array( 'Advertisement' => array( 'id' => '62', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/e-survey', 'images' => '20211124221103bda9f65e28426fc1f93c4f5f223cd1bc.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-11-24', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '71', 'rght' => '72' ) ), (int) 20 => array( 'Advertisement' => array( 'id' => '68', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hi-target', 'images' => '2021112422134905fc59de564b69bfad9ca0b5f7204ffa.png', 'display' => '3', 'created' => '2021-08-05', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '73', 'rght' => '74' ) ), (int) 21 => array( 'Advertisement' => array( 'id' => '73', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/dji', 'images' => '2021102921504774fd5e8eec5eed69455accd89f7429e5.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '83', 'rght' => '84' ) ), (int) 22 => array( 'Advertisement' => array( 'id' => '74', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/spectra-geospatial-spectra-precision', 'images' => '202110292149162a2a919ea2a12b8255429f33eb51a1a8.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '85', 'rght' => '86' ) ), (int) 23 => array( 'Advertisement' => array( 'id' => '75', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/efix', 'images' => '202207131224432d602a710c7f1a152566aec421d281d7.png', 'display' => '3', 'created' => '2022-07-13', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '87', 'rght' => '88' ) ), (int) 24 => array( 'Advertisement' => array( 'id' => '76', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/chcnav', 'images' => '20220714162725db2138b3dcabb86eedc65c4ba1f6ccce.jpg', 'display' => '3', 'created' => '2022-07-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '89', 'rght' => '90' ) ), (int) 25 => array( 'Advertisement' => array( 'id' => '78', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202208051039345c0c28b21fe05a0c9d4f65b176fe7063.jpg', 'display' => '3', 'created' => '2022-08-05', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '93', 'rght' => '94' ) ), (int) 26 => array( 'Advertisement' => array( 'id' => '79', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202210171541561896d0eb31d272d3d99a9a8c0d3582fa.png', 'display' => '3', 'created' => '2022-10-17', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '95', 'rght' => '96' ) ), (int) 27 => array( 'Advertisement' => array( 'id' => '100', 'name' => null, 'link' => '', 'images' => '20230515143931e088ce1b8d5b9bcf57916a733e5ff5e3.jpg', 'display' => '3', 'created' => '2023-05-15', 'modified' => '2023-05-15', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '117', 'rght' => '118' ) ), (int) 28 => array( 'Advertisement' => array( 'id' => '107', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/bua-dung-cho-khao-sat-dia-chat-estwing-e3-22p.html', 'images' => '20240130151328303b311c40a2276c91bf7e4f0aa460ce.png', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '125', 'rght' => '126' ) ), (int) 29 => array( 'Advertisement' => array( 'id' => '108', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/ong-nhom-celestron-nature-dx-10-42.html', 'images' => '20240130151701574ebc151c3252c2eb93d6504efdc5ab.jpg', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '127', 'rght' => '128' ) ), (int) 30 => array( 'Advertisement' => array( 'id' => '114', 'name' => null, 'link' => '', 'images' => '20250917151944a9ff8314bd4af3bf87c9037dceceff53.png', 'display' => '3', 'created' => '2025-09-17', 'modified' => '2025-09-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '131', 'rght' => '132' ) ) ) $chayphai = array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ) $chaytrai = array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ) $chiasekinhnghiem = array() $list_menu_footer = array() $danhmuc_left_parent_sphot = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc_left_parent = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc = array( (int) 0 => array( 'Catproduct' => array( 'id' => '1', 'name' => 'Trang chủ', 'slug' => 'trang-chu' ) ), (int) 1 => array( 'Catproduct' => array( 'id' => '3', 'name' => 'Giới thiệu ', 'slug' => 'gioi-thieu' ) ), (int) 2 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ), (int) 3 => array( 'Catproduct' => array( 'id' => '5', 'name' => 'Phần mềm - HDSD ', 'slug' => 'phan-mem-hdsd' ) ), (int) 4 => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'slug' => 'kien-thuc-ung-dung' ) ), (int) 5 => array( 'Catproduct' => array( 'id' => '6', 'name' => 'Liên hệ', 'slug' => 'lien-he' ) ) ) $support = array( (int) 0 => array( 'Support' => array( 'id' => '13', 'name' => 'Co so Ha noi', 'phone' => '098 987 678', 'yahoo' => 'duycuong7640', 'skype' => 'duycuong7640', 'pos' => '0', 'created' => '2013-09-13', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ), (int) 1 => array( 'Support' => array( 'id' => '16', 'name' => 'Co so TP.HCM', 'phone' => '3252 436 432', 'yahoo' => 'duycuong7640', 'skype' => 'tuvantubep', 'pos' => '0', 'created' => '2014-01-15', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ) ) $content_for_layout = '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ' $scripts_for_layout = '' $count = (int) 0 $price = (int) 0 $sl = (int) 0 $cap1 = array( 'Catproduct' => array( 'id' => '1', 'name' => 'Trang chủ', 'slug' => 'trang-chu' ) ) $dm_c2 = array()include - APP/View/Elements/menu.ctp, line 56 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::element() - CORE/Cake/View/View.php, line 424 include - APP/View/Layouts/home.ctp, line 169 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::renderLayout() - CORE/Cake/View/View.php, line 539 View::render() - CORE/Cake/View/View.php, line 483 Controller::render() - CORE/Cake/Controller/Controller.php, line 957 ProductController::chitiet() - APP/Controller/ProductController.php, line 135 ReflectionMethod::invokeArgs() - [internal], line ?? Controller::invokeAction() - CORE/Cake/Controller/Controller.php, line 485 Dispatcher::_invoke() - CORE/Cake/Routing/Dispatcher.php, line 186 Dispatcher::dispatch() - CORE/Cake/Routing/Dispatcher.php, line 161 [main] - APP/webroot/index.php, line 92
Notice (8): Undefined index: name_eng [APP/View/Elements/menu.ctp, line 55]
Code Context
">
<div class="accordion-group"><div class="accordion-heading"><a class="accordion-toggle" <?php if(!empty($dm_c2)){?>data-toggle="collapse" data-parent="#accordion2" href="#collapse<?php echo $cap1['Catproduct']['id'];?>" title="<?php echo $cap1['Catproduct']['name'.LANGUAGE];?>"<?php }else{?>href="<?php echo DOMAIN.$cap1['Catproduct']['slug'];?>"<?php }?>>
$viewFile = '/home/tracdiathanhda/domains/tracdiathanhdat.vn/public_html/app/View/Elements/menu.ctp'
$dataForView = array(
'cat12' => array(
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
'description_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'keywords_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'title_for_layout' => 'Máy kinh vĩ',
'tinmoiup' => array(
(int) 0 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 6 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 7 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 8 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 9 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
)
),
'tinlq' => array(
(int) 0 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 6 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 7 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 8 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 9 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
)
),
'detailNews' => array(
'Post' => array(
'id' => '494',
'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử',
'code' => null,
'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>',
'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li>
</ul>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li>
</ul>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p>
<p>
</p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p>
<p>
</p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li>
</ul>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li>
</ul>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li>
</ul>
<div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;">
<img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div>
',
'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy kinh vĩ',
'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'created' => '2017-09-11',
'modified' => '2026-07-12',
'status' => '1',
'view' => '40085',
'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '19',
'rght' => '20',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
'setting' => array(
'id' => '1',
'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt',
'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'address_eng' => '',
'address' => '<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p>
<p>
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br />
Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p>
<div>
<p>
<strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p>
</div>
<p>
<span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p>
<p>
<span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br />
<br />
<a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p>
',
'contactinfo_eng' => '',
'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br />
<br />
1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br />
2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br />
3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br />
4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br />
5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội',
'contactinfo' => '<div dir="rtl" style="text-align: left;">
<u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div>
<div style="">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br />
Tel: (024) 3776 4930 <br />
Fax: (024) 3776 5908<br />
Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br />
Hotline: <strong>0913 051 734</strong><br />
<br />
<strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br />
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br />
</div>
<div style="">
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div>
<div style="">
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div>
<div style="">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br />
<br />
- 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br />
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div>
',
'telephone' => '01659 014592',
'hotline' => '0913 051 734',
'email' => 'tracdiathanhdat@gmail.com',
'url' => '',
'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ',
'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!',
'created' => '2012-06-05',
'modified' => '1783492910',
'youtube' => 'http://youtube.com',
'twitter' => 'https://twitter.com/',
'myspace' => 'https://myspace.com/',
'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/',
'email2' => 'duycuong7640',
'skype' => 'hothihuyen.hn',
'yahoo' => 'duycuong7640',
'yahoo1' => 'duycuong7640',
'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873',
'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>',
'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux',
'slogan_eng' => '',
'printer' => '',
'googleplus' => '',
'bando' => '<p>
<iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p>
',
'gioithieu' => '<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p>
',
'thongtincongty' => 'Sửa máy lạnh tại nhà
Sửa máy lạnh tại HCM
Sửa tủ lạnh
Bơm ga máy lạnh ',
'trogiupkh' => 'Tai nghe Iphone
Sua may tinh tai nha
Máy Ozone Z755',
'dichvuft' => 'Sửa máy lạnh
Bảo dưỡng máy lạnh
Vệ sinh máy lạnh
Lắp đặt máy lạnh',
'bb' => '',
'zing' => '',
'hotline2' => '0912 35 65 75',
'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script>
<script>
(function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){
(i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o),
m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m)
})(window,document,'script','//www.google-analytics.com/analytics.js','ga');
ga('create', 'UA-72584674-1', 'auto');
ga('send', 'pageview');
</script>
<!-- Global site tag (gtag.js) - Google Ads: 876059345 -->
<script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script>
<script>
window.dataLayer = window.dataLayer || [];
function gtag(){dataLayer.push(arguments);}
gtag('js', new Date());
gtag('config', 'AW-876059345');
</script>
<script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>',
'theh1' => 'thanhdatsurvey.JSC',
'hanoi' => '<div>
<strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div>
<div>
<strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div>
<div>
<strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div>
<div>
<strong>Email </strong>: info@ifes.vn</div>
',
'tphcm' => '<div>
<strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div>
<div>
<strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div>
<div>
<strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div>
<div>
<strong>Email </strong>: info@ifes.vn</div>
',
'tt' => '',
'pp' => 'https://www.facebook.com/ruaxetudong.net',
'tphcm_eng' => '',
'hanoi_eng' => '',
'hotline_eng' => '',
'name_eng' => '',
'chinhsach' => null,
'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>',
'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>',
'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;">
<span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br />
<br />
Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br />
</p>
<span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>',
'gt_eng' => ''
),
'tin_ft' => array(
(int) 0 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
)
),
'slideshow' => array(
(int) 0 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 6 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 7 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 8 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 9 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 10 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 11 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 12 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 13 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 14 => array(
'Slideshow' => array(
[maximum depth reached]
)
)
),
'adv_khuyenmai' => array(
'Advertisement' => array(
'id' => '104',
'name' => null,
'link' => '',
'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png',
'display' => '5',
'created' => '2024-01-16',
'modified' => '2024-06-21',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '121',
'rght' => '122'
)
),
'doitac' => array(
(int) 0 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 6 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 7 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 8 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 9 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 10 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 11 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 12 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 13 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 14 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 15 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 16 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 17 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 18 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 19 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 20 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 21 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 22 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 23 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 24 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 25 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 26 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 27 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 28 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 29 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 30 => array(
'Advertisement' => array(
[maximum depth reached]
)
)
),
'chayphai' => array(
'Advertisement' => array(
'id' => '50',
'name' => null,
'link' => '',
'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg',
'display' => '2',
'created' => '2021-01-20',
'modified' => '2021-01-20',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '53',
'rght' => '54'
)
),
'chaytrai' => array(
'Advertisement' => array(
'id' => '49',
'name' => null,
'link' => '',
'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg',
'display' => '1',
'created' => '2021-01-20',
'modified' => '2021-01-20',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '51',
'rght' => '52'
)
),
'chiasekinhnghiem' => array(),
'list_menu_footer' => array(),
'danhmuc_left_parent_sphot' => array(
(int) 0 => array(
'Catproduct' => array(
[maximum depth reached]
)
)
),
'danhmuc_left_parent' => array(
(int) 0 => array(
'Catproduct' => array(
[maximum depth reached]
)
)
),
'danhmuc' => array(
(int) 0 => array(
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Catproduct' => array(
[maximum depth reached]
)
)
),
'support' => array(
(int) 0 => array(
'Support' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Support' => array(
[maximum depth reached]
)
)
),
'content_for_layout' => '<style>
@font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal}
#ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative}
#ez-toc-container.selected{
width: 10px;
}
#ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"}
.toc_cap2{
padding-left: 25px!important;
}
.toc_cap3{
padding-left: 50px!important;
}
.ct-tt table.download{
width: 100%!important;
}
.ct-tt a.download{
background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase;
}
.ct-tt table.dangkythamgia{
width: 100%!important;
}
.ct-tt a.dangkythamgia{
padding:10px 20px; background-color: #00ffff;
}
.ct-tt div{max-width: 100%;}
</style>
<div class="bg-cat-danhmuc">
<div class="cat-title-danhmuc">
<a href="" title="">
<h1></h1>
</a>
</div>
</div>
<div class="box-content-detail">
<div class="clear-content"></div><div class="clear-content"></div>
<div class="col-product">
<div class="box-new-content">
<div class="box-new-detail">
<div class="time-date">
12:00:00
<span>11/09/2017</span>
</div><!--end time-date--><div class="clear-content"></div>
<div class="box-like-share">
<div class="like1">
<div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div>
</div>
</div><!--end box-like-share--><div class="clear-content"></div>
<div class="ct-tt">
<style>
#row-2097407503{display: flex;flex-wrap: wrap;}
#row-2097407503 p{
margin-bottom: 20px;
}
.large-4 {
flex-basis: 33.3333333333%;text-align: center;
max-width: 33.3333333333%;margin-bottom: 30px;
}
.large-4 a{
color: #fff;text-transform: uppercase;font-weight:bold;
}
.large-4 .col-inner{padding:0 15px;}
.expand {
display: block;
max-width: 100%!important;
padding-left: 0!important;
padding-right: 0!important;
width: 100%!important;padding:10px;
}
.button.success {
background-color: #4a90e2;
}
.box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover {
transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%);
}
.box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner {
transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s;
}
.box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover {
box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%);
}
.button span {
font-weight: 400;
}
.is-shade:after {
box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%);
}
</style>
<div class="" id="row-2097407503">
<p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p>
<div id="col-680915017" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>Gọi Điện</span>
</a>
</div>
</div>
<div id="col-569433728" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>Nhắn Tin</span>
</a>
</div>
</div>
<div id="col-272138532" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>chat zalo</span>
</a>
</div>
</div>
</div>
<div class="clear-main"></div>
</div><!--end ct-tt-->
<!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>-->
<div class="clear-content"></div><div class="clear-content"></div>
</div><!--end box-new-detail-->
<div class="bar-new-detail">
<label>Private same category</label>
<div class="clear-main"></div>
<ul>
<li>
<a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title="">
<h3> <span>(18-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title="">
<h3> <span>(06-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title="">
<h3> <span>(05-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title="">
<h3> <span>(30-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title="">
<h3> <span>(29-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title="">
<h3> <span>(28-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title="">
<h3> <span>(25-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title="">
<h3> <span>(14-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title="">
<h3> <span>(12-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title="">
<h3> <span>(09-07-2021)</span></h3>
</a>
</li>
</ul>
<div class="clear-main"></div>
</div><!--end bar-new-detail-->
<div class="clear-main"></div>
<div class="pagination">
<span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div>
<div class="clear-main"></div>
</div><!--end box-ctbar-->
</div>
</div>
<script type="text/javascript">
var ToC =
"<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" +
// "<div class='tile_mucluc'><span>Mục lục:</span></div>" +
"<ul class='ez-toc-list ez-toc-list-level-1'>";
var newLine, el, title, link ,id;
$(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() {
el = $(this);
title = el.text();
id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,"");
$(this).attr('id', id);
if($(this).is("h2")){
newLine =
"<li>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
if($(this).is("h3")){
newLine =
"<li class='toc_cap2'>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
if($(this).is("h4")){
newLine =
"<li class='toc_cap3'>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
ToC += newLine;
});
ToC +=
"</ul>" +
"</nav></div><div style='clear:both;'></div>";
$(".ct-tt").prepend(ToC);
$( ".ez-toc-glyphicon" ).toggle(
function() {
$('#ez-toc-container').addClass( "selected" );
$('.menu_danhmuc').hide();
}, function() {
$('#ez-toc-container').removeClass( "selected" );
$('.menu_danhmuc').show();
}
);
</script>
',
'scripts_for_layout' => ''
)
$cat12 = array(
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
)
$description_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)'
$keywords_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)'
$title_for_layout = 'Máy kinh vĩ'
$tinmoiup = array(
(int) 0 => array(
'Post' => array(
'id' => '823',
'name' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật – Những bước quan trọng để đảm bảo độ chính xác',
'code' => null,
'alias' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-–-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập trạm Base RTK đúng cách có quan trọng không? Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Thiết lập trạm Base RTK đúng cách có quan trọng không?<br />
<br />
Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.<br />
<br />
Mặc dù giao diện phần mềm của mỗi hãng có thể khác nhau, quy trình thiết lập Base nhìn chung đều tuân theo các nguyên tắc giống nhau. Dưới đây là các bước cơ bản giúp triển khai một trạm Base RTK ổn định và đáng tin cậy.</em><br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7881291487147_f174a50258d6ad97ccd34f717df81a2b.jpg" style="width: 800px; height: 600px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Chọn vị trí đặt Base</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quan trọng nhất trước khi bật máy. Một vị trí tốt nên đáp ứng các điều kiện sau:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thoáng, có góc quan sát bầu trời rộng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh cây lớn, mái che hoặc công trình cao tầng che khuất vệ tinh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế đặt gần tường kính, mái tôn hoặc mặt nước để giảm hiện tượng phản xạ tín hiệu (Multipath).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh gần đường dây điện cao thế hoặc nguồn phát sóng mạnh nếu có thể.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nền đất hoặc mặt bằng ổn định, ít rung động.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu đặt Base trên mốc khống chế, cần đảm bảo mốc không bị xê dịch trong suốt quá trình đo.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lắp chân máy và định tâm</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi chọn vị trí phù hợp:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở chân máy chắc chắn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều chỉnh chiều cao thuận tiện cho việc thao tác.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định tâm chính xác trên mốc bằng dọi quang học hoặc dọi laser (nếu có).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng bọt thủy theo hướng dẫn của thiết bị.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trường hợp sử dụng chân máy thông thường ngoài hiện trường, nên kiểm tra lại việc định tâm sau khi siết chặt các khóa chân máy vì quá trình thao tác có thể làm lệch vị trí ban đầu.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Đo chiều cao anten</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten là một thông số rất quan trọng. Thông thường, phần mềm sẽ yêu cầu người dùng nhập:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao nghiêng (Slant Height), hoặc</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao đứng (Vertical Height).</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần đo đúng theo phương pháp mà phần mềm yêu cầu.<br />
<br />
> Một số lưu ý:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng thước chuyên dụng nếu có.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo ít nhất hai lần để kiểm tra.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại đơn vị (mét hoặc milimét).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không ước lượng bằng mắt.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc nhập sai chiều cao anten sẽ làm sai tọa độ của trạm Base và có thể ảnh hưởng đến toàn bộ dữ liệu hiệu chỉnh RTK.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Thiết lập tọa độ Base</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quyết định hệ quy chiếu mà Rover sẽ sử dụng. <br />
<br />
4.1 Trường hợp 1: Base đặt trên điểm đã biết tọa độ (<strong>Known Point</strong>)<br />
<br />
Đây là phương pháp được ưu tiên. Người dùng nhập chính xác:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X, Y, H hoặc B, L, H.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ tọa độ tương ứng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi xác nhận, Base sẽ phát dữ liệu hiệu chỉnh dựa trên tọa độ đã biết.<br />
<br />
> Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ tin cậy cao.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với đo địa chính, khảo sát công trình, hoàn công và các công việc yêu cầu liên kết với hệ tọa độ hiện có.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
4.2 Trường hợp 2: <strong>Base Here</strong> (Base tự xác định tọa độ)<br />
<br />
Nếu chưa có mốc khống chế, người dùng có thể để máy tự xác định vị trí hiện tại (Base Here hoặc Autonomous).<br />
Phương pháp này thường được sử dụng khi:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát sơ bộ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập lưới khống chế tạm.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình chưa yêu cầu liên kết với hệ tọa độ chính thức.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu ý rằng tọa độ Base Here chỉ mang tính tương đối. Nếu cần liên kết với hệ tọa độ công trình hoặc VN-2000, nên đo khống chế hoặc sử dụng các phương pháp chuyển đổi phù hợp trước khi triển khai chính thức.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cấu hình truyền dữ liệu cải chính</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Base có tọa độ, cần cấu hình phương thức truyền dữ liệu hiệu chỉnh đến Rover. Hai phương thức phổ biến hiện nay là:<br />
<br />
<strong>5.1 Truyền bằng Radio UHF</strong><br />
<br />
Khi dùng phương thức này cần kiểm tra:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tần số phát.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Băng thông (Bandwidth).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao thức truyền (Protocol).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten UHF đã được lắp đúng.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base và Rover phải sử dụng cùng cấu hình để có thể liên lạc.<br />
<br />
<strong>5.2 Truyền qua Internet (NTRIP)</strong><br />
<br />
Trong trường hợp sử dụng mạng Internet nội bộ hoặc triển khai Base riêng:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra kết nối 4G/5G hoặc Wi-Fi.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra địa chỉ IP hoặc Caster.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Port.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mountpoint.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tài khoản và mật khẩu nếu có.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Kiểm tra trạng thái phát cải chính</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi hoàn tất cấu hình, cần kiểm tra:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base đã bắt đủ số lượng vệ tinh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đã bắt đầu phát dữ liệu cải chính.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không xuất hiện cảnh báo lỗi.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radio hoặc Internet hoạt động ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin hoặc nguồn ngoài đủ cho thời gian làm việc.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các hệ thống Radio, nên kiểm tra thêm cường độ tín hiệu giữa Base và Rover trước khi bắt đầu đo.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Kiểm tra Rover đã FIX ổn định</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Rover kết nối với Base, không nên đo ngay. <br />
<br />
Nên kiểm tra:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm đạt FIX.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lượng vệ tinh ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PDOP ở mức phù hợp.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Age of Correction thấp và ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số RMS hoặc Estimated Precision nằm trong giới hạn cho phép của công việc.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu Rover liên tục chuyển giữa FIX và FLOAT, cần kiểm tra lại:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách đến Base.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu Radio hoặc Internet.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện che khuất vệ tinh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình truyền dữ liệu.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Một số lỗi thường gặp khi thiết lập Base</span></span></h2>
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đặt Base không phù hợp</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt dưới tán cây, gần nhà cao tầng hoặc gần nguồn phản xạ mạnh có thể làm giảm chất lượng quan sát GNSS.</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo sai chiều cao anten</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá phổ biến và có thể ảnh hưởng đến kết quả tính toán tọa độ của trạm Base.</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai tọa độ Base</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ, sai kinh tuyến trục, sai cao độ hoặc nhập nhầm tọa độ sẽ khiến Rover đo sai toàn bộ.</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai cấu hình Radio</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác tần số, giao thức hoặc công suất giữa Base và Rover sẽ khiến Rover không nhận được dữ liệu hiệu chỉnh.</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Di chuyển Base trong khi đang đo</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu chân máy bị dịch chuyển trong quá trình làm việc, toàn bộ kết quả sau thời điểm dịch chuyển đều có thể không còn đảm bảo độ tin cậy và nên được kiểm tra hoặc đo lại.</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguồn điện không đủ</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base mất nguồn hoặc khởi động lại giữa ca đo sẽ làm gián đoạn việc truyền dữ liệu hiệu chỉnh đến Rover.<br />
<br />
>>> Thiết lập Base RTK không chỉ là vài thao tác trên bộ điều khiển mà còn bao gồm việc lựa chọn vị trí đặt máy, định tâm chính xác, nhập đúng chiều cao anten, cấu hình tọa độ và kiểm tra trạng thái hoạt động của toàn bộ hệ thống. Thực hiện đúng các bước ngay từ đầu sẽ giúp Rover nhận dữ liệu hiệu chỉnh ổn định, giảm thời gian xử lý sự cố ngoài thực địa và nâng cao độ tin cậy của kết quả đo.<br />
<br />
Mặc dù tên gọi các chức năng hoặc giao diện có thể khác nhau giữa các hãng, nguyên tắc thiết lập trạm Base về cơ bản vẫn tương tự. Nắm vững các nguyên lý này sẽ giúp người sử dụng dễ dàng làm việc với nhiều dòng RTK khác nhau.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 260626.png" style="width: 800px; height: 533px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Liên hệ ngay <a href="https://zalo.me/0913051734"><span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt qua Zalo</strong></span></a> để được tư vấn chọn máy phù hợp nhất!</span></span><br />
<a class="zalo-float" href="https://zalo.me/0949322456" rel="noopener" target="_blank"> <span class="zalo-icon">Z</span> <span class="zalo-text">Nhắn Zalo</span> </a>
<style type="text/css">
.zalo-float {
position: fixed;
right: 20px;
bottom: 90px;
z-index: 9999;
display: flex;
align-items: center;
gap: 8px;
background: #0068ff;
color: #fff;
padding: 12px 16px;
border-radius: 999px;
font-weight: 700;
font-size: 15px;
text-decoration: none;
box-shadow: 0 8px 24px rgba(0,0,0,0.22);
}
.zalo-float:hover {
transform: translateY(-2px);
opacity: 0.95;
}
.zalo-icon {
width: 28px;
height: 28px;
border-radius: 50%;
background: #fff;
color: #0068ff;
display: flex;
align-items: center;
justify-content: center;
font-weight: 800;
}
@media (max-width: 768px) {
.zalo-float {
right: 14px;
bottom: 80px;
padding: 11px 14px;
font-size: 14px;
}
}</style>
',
'images' => '202606260951032f4d94b16f8c4b40c845fa69fd0c4dc4.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật từ A đến Z',
'meta_key' => '',
'meta_des' => 'Hướng dẫn chi tiết cách thiết lập trạm Base RTK: chọn vị trí, định tâm, đo chiều cao anten, cấu hình Known Point hoặc Base Here, Radio/NTRIP và các lỗi thường gặp.',
'created' => '2026-06-26',
'modified' => '2026-07-12',
'status' => '1',
'view' => '525',
'slug' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '557',
'rght' => '558',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 1 => array(
'Post' => array(
'id' => '822',
'name' => 'Hiểu đúng về RTCM 1021–1027, Helmert (Bursa-Wolf), 7 tham số và chuyển đổi hệ tọa độ',
'code' => null,
'alias' => 'hieu-dung-ve-rtcm-1021–1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàncầu sang hệ tọa độ làm việc tại địa phương.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàn cầu sang hệ tọa độ làm việc tại địa phương.<br />
<br />
Vậy RTK thực chất đo trong hệ nào?<br />
<br />
Máy thu GNSS không đo trực tiếp trong hệ tọa độ VN-2000. Thay vào đó, thiết bị xác định vị trí trong một hệ quy chiếu địa tâm toàn cầu (global geocentric reference frame), chẳng hạn như WGS84 hoặc các realization gần với ITRF (International Terrestrial Reference Frame).<br />
<br />
Trong khi đó, tại Việt Nam, phần lớn bản đồ địa hình, bản đồ địa chính, hồ sơ thiết kế và công trình lại sử dụng hệ tọa độ VN-2000 hoặc hệ tọa độ công trình. <br />
<br />
Vì vậy, trước khi có thể sử dụng ngoài thực địa, kết quả đo GNSS cần được chuyển đổi sang hệ tọa độ làm việc.<br />
<br />
Có thể hình dung quy trình tổng quát như sau: <strong>GNSS/RTK → WGS84 hoặc ITRF (realization cụ thể) → Chuyển đổi hệ quy chiếu và phép chiếu bản đồ (khi cần) → VN-2000 hoặc hệ tọa độ công trình.</strong><br />
<br />
<em>Lưu ý: WGS84 và ITRF đều có nhiều phiên bản (realizations) được cập nhật theo thời gian. Trong hầu hết công việc RTK thông thường, quá trình này đã được phần mềm RTK hoặc dịch vụ CORS xử lý. Tuy nhiên, với các ứng dụng yêu cầu độ chính xác cao hoặc xử lý dữ liệu nhiều thời kỳ, vẫn cần quan tâm đến reference frame và epoch của dữ liệu.</em></span></span><br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. 7 tham số là gì?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trắc địa, một trong những mô hình phổ biến để chuyển đổi giữa hai hệ quy chiếu là phép biến đổi 7 tham số (Seven-Parameter Transformation).<br />
<br />
Bộ tham số gồm: </span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔX: Tịnh tiến theo trục X</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔY: Tịnh tiến theo trục Y</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔZ: Tịnh tiến theo trục Z</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rx: Góc quay quanh trục X</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ry: Góc quay quanh trục Y</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rz: Góc quay quanh trục Z</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Scale: Hệ số tỷ lệ (ppm)</span></span></li>
</ul>
<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/coordtrans datum transformation.gif" style="width: 613px; height: 407px;" /></p>
<br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong đó:<br />
- Ba tham số đầu mô tả sự dịch chuyển giữa hai hệ quy chiếu.</span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ba tham số tiếp theo mô tả sự quay.</span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Tham số cuối cùng mô tả sự khác biệt về tỷ lệ.</span></span></span></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình này giả thiết rằng mối quan hệ giữa hai hệ quy chiếu có thể được biểu diễn bằng một phép biến đổi gồm ba tham số tịnh tiến, ba tham số quay và một tham số tỷ lệ.<br />
<br />
Trong các phần mềm RTK, người dùng có thể gặp nhiều tên gọi như:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Seven Parameters</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Helmert Transformation</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bursa-Wolf Transformation</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Datum Transformation</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư hiện trường, điều quan trọng cần nhớ là: 7 tham số là một mô hình dùng để chuyển đổi giữa hai hệ quy chiếu.<br />
<br />
Trong những khu vực có biến dạng không đồng nhất, mô hình này có thể không đạt độ chính xác cao bằng các phương pháp sử dụng lưới hiệu chỉnh (Grid Shift).<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Bursa-Wolf và Helmert có giống nhau không?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là điểm khá nhiều người nhầm lẫn. Trong nhiều phần mềm RTK, hai tên gọi: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Helmert Transformation & </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Bursa-Wolf Transformation </span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">được sử dụng gần như thay thế cho nhau. <br />
<br />
Tuy nhiên, xét dưới góc độ học thuật, Bursa-Wolf là một quy ước biểu diễn của phép biến đổi Helmert 7 tham số. Sự khác biệt chủ yếu nằm ở quy ước dấu và cách biểu diễn các tham số quay. Đối với phần lớn công việc RTK ngoài thực địa, sự khác biệt này thường không ảnh hưởng đến quá trình sử dụng nếu các tham số được khai báo đúng theo quy ước mà phần mềm yêu cầu.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Ngoài 7 tham số còn có những phương pháp nào?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi phép chuyển đổi tọa độ đều sử dụng mô hình 7 tham số. Một số phương pháp phổ biến khác gồm:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Molodensky–Badekas</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp này cũng sử dụng bảy tham số nhưng thực hiện phép quay quanh một điểm gốc cục bộ (origin point) thay vì tâm Trái Đất. Cách tiếp cận này thường giúp giảm ảnh hưởng của sai số quay trong các hệ tọa độ địa phương.</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Grid Shift</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác với mô hình 7 tham số, Grid Shift không sử dụng một bộ tham số chung cho toàn bộ khu vực mà áp dụng các giá trị hiệu chỉnh được nội suy từ lưới.<br />
<br />
Ví dụ: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">NTv2, </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Geoid Grid</span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với những khu vực có biến dạng không đồng đều, Grid Shift thường cho độ chính xác cao hơn mô hình 7 tham số.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. RTCM 1021–1027 là gì?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM (Radio Technical Commission for Maritime Services) là tiêu chuẩn quốc tế dùng để truyền dữ liệu hiệu chỉnh trong GNSS RTK. <br />
<br />
Khi nhắc đến RTCM, nhiều người chỉ nghĩ đến các bản tin phục vụ quá trình FIX. Tuy nhiên, trong tiêu chuẩn RTCM 3.x còn có nhóm bản tin 1021–1027, được định nghĩa để truyền các thông tin liên quan đến phép biến đổi datum, phép chiếu bản đồ và một số mô hình hiệu chỉnh phục vụ chuyển đổi sang hệ tọa độ địa phương.<br />
<br />
Theo tài liệu của RTCM SC-104 và một số nhà sản xuất phần mềm GNSS, nhóm bản tin này được thiết kế nhằm hỗ trợ việc chuyển đổi từ hệ quy chiếu GNSS sang hệ tọa độ địa phương. <br />
<br />
Tuy nhiên cần lưu ý:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi mạng CORS đều phát các bản tin này.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi bộ thu GNSS hoặc phần mềm RTK đều hỗ trợ đầy đủ việc giải mã và áp dụng các bản tin này.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc triển khai có thể khác nhau giữa các phiên bản RTCM, nhà sản xuất thiết bị và dịch vụ CORS.</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì vậy, không nên mặc định rằng mọi hệ thống CORS đều truyền hoặc sử dụng RTCM 1021–1027.<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/1655118093874(1).jpg" style="width: 600px; height: 450px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Vì sao có phần mềm RTK không cần nhập 7 tham số?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, người dùng không cần nhập thủ công, nhưng điều đó không có nghĩa quá trình chuyển đổi không tồn tại. <br />
<br />
Việc chuyển đổi có thể đã được thực hiện thông qua:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cơ sở dữ liệu CRS tích hợp trong phần mềm hoặc bộ điều khiển;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ffile hệ tọa độ (CRS/Projection) được import;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình do nhà sản xuất thiết lập;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin từ dịch vụ CORS;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc các cơ chế chuyển đổi riêng của phần mềm.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Do đó, việc không phải nhập không đồng nghĩa với không sử dụng phép chuyển đổi.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Khi nào vẫn phải nhập 7 tham số?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số tình huống vẫn cần người dùng thiết lập thủ công, chẳng hạn:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng Base cục bộ;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Llàm việc với hệ tọa độ công trình;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng hệ tọa độ địa phương chưa có trong phần mềm;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu khảo sát cũ;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc làm việc với các dự án có quy định riêng về hệ tọa độ.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, người dùng có thể phải:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập 7 tham số;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Import file hệ tọa độ;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc thực hiện Site Calibration (Localization).</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. RTCM 1021–1027 có thay thế Site Calibration không?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Câu trả lời là không. Hai khái niệm này phục vụ những mục đích khác nhau.<br />
<br />
RTCM 1021–1027 là nhóm bản tin dùng để truyền các thông tin liên quan đến phép chuyển đổi hệ quy chiếu và phép chiếu bản đồ. Trong khi đó, Site Calibration (Localization) là quá trình thiết lập mối quan hệ giữa hệ tọa độ GNSS và hệ tọa độ của dự án thông qua các điểm khống chế ngoài thực địa.<br />
<br />
Site Calibration không thay thế phép chuyển đổi giữa các hệ quy chiếu mà chỉ hiệu chỉnh cục bộ để phù hợp với hệ tọa độ công trình. Ngay cả khi sử dụng mạng CORS và chọn đúng hệ tọa độ, nhiều dự án vẫn yêu cầu kiểm tra trên các mốc khống chế trước khi tiến hành đo chính thức.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Những lỗi thường gặp ngoài thực địa</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Qua thực tế sử dụng RTK, một số lỗi liên quan đến hệ tọa độ thường gặp gồm:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai kinh tuyến trục.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai múi chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai mô hình geoid.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai datum hoặc realization.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai đơn vị của Rx, Ry, Rz (độ, giây hoặc radian).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai hệ số Scale (ppm hoặc hệ số tỷ lệ).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dùng nhầm hệ tọa độ công trình.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tin tưởng trạng thái FIX nhưng không kiểm tra trên mốc khống chế.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những nguyên nhân có thể khiến tọa độ sai hàng mét, thậm chí hàng chục mét dù máy vẫn báo FIX bình thường.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">9. Người sử dụng RTK cần quan tâm đến điều gì?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với phần lớn công việc khảo sát, địa chính, thi công hoặc hoàn công, người dùng không nhất thiết phải nhớ chi tiết từng bản tin RTCM.<br />
<br />
Điều quan trọng hơn là:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo đúng Job / Project.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng hệ tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng kinh tuyến trục.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng múi chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng mountpoint khi dùng CORS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập đúng chiều cao anten.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại trên mốc khống chế.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ nhìn trạng thái FIX mà bỏ qua cấu hình hệ tọa độ.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu kết quả đo lệch toàn bộ so với bản vẽ hoặc mốc ngoài thực địa, cần kiểm tra lại hệ tọa độ trước khi nghi ngờ máy RTK hoặc tín hiệu vệ tinh.</span></span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
>>> RTCM 1021–1027, Helmert, Bursa-Wolf, 7 tham số và Site Calibration đều liên quan đến quá trình đưa kết quả GNSS về hệ tọa độ làm việc, nhưng chúng không phải là các khái niệm tương đương.</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS xác định vị trí trong hệ quy chiếu toàn cầu, thường là WGS84 hoặc các realization gần với ITRF.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">VN-2000 và hệ tọa độ công trình là các hệ tọa độ làm việc được sử dụng trong khảo sát, thiết kế và thi công tại Việt Nam.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7 tham số (Bursa-Wolf/Helmert) là một trong những mô hình phổ biến dùng để chuyển đổi tọa độ giữa các hệ quy chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM 1021–1027 là nhóm bản tin được thiết kế để hỗ trợ truyền thông tin liên quan đến phép biến đổi tọa độ và phép chiếu bản đồ. Tuy nhiên, việc các bản tin này có được sử dụng hay không còn phụ thuộc vào phiên bản RTCM, hệ thống CORS và phần mềm RTK.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Site Calibration (Localization) là quá trình hiệu chỉnh cục bộ theo các điểm khống chế của dự án và không nên xem là sự thay thế cho các phép biến đổi giữa các hệ quy chiếu.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư khảo sát và thi công, hiểu đúng vai trò của từng khái niệm sẽ giúp cấu hình RTK chính xác hơn, xử lý tốt các tình huống liên quan đến hệ tọa độ và hạn chế các sai lệch không đáng có ngoài thực địa.</span></span><br />
<br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 230626 2.png" style="width: 800px; height: 533px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;"><u><strong>Tài liệu tham khảo</strong></u></span></span><br />
<ul>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">RTCM Special Committee 104 – <em>RTCM Standard for Differential GNSS (Multiple Signal Messages)</em>.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IOGP – <em>Geomatics Guidance Note 7, Coordinate Conversions and Transformations</em>.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">EPSG Geodetic Parameter Dataset & Guidance Note 7-2.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">ISO 19111 – <em>Geographic Information — Referencing by Coordinates</em>.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Carlson Software – <em>RTCM 1021–1027 White Paper</em>.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Leica Geosystems – <em>Captivate Coordinate System Guide</em>.</span></span></li>
</ul>
',
'images' => '20260625150050d64d8db365e7a0f663896871ecf242ce.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'RTK chuyển từ WGS84 sang VN-2000 như thế nào? Giải thích RTCM 1021–1027 và 7 tham số',
'meta_key' => '',
'meta_des' => 'Tìm hiểu cách RTK chuyển đổi từ WGS84 sang VN-2000, bản chất của RTCM 1021–1027, Bursa-Wolf Transformation, Helmert 7 tham số và vai trò của Site Calibration trong GNSS RTK.',
'created' => '2026-06-25',
'modified' => '2026-07-12',
'status' => '1',
'view' => '752',
'slug' => 'hieu-dung-ve-rtcm-1021-1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '555',
'rght' => '556',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 2 => array(
'Post' => array(
'id' => '821',
'name' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân phổ biến và cách khắc phục!',
'code' => null,
'alias' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Với khả năng xác định tọa độ ở độ chính xác mức centimet, RTK đã trở thành công cụ gần như không thể thiếu đối với nhiều kỹ sư. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br />
<br />
Vậy vì sao máy RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Trong điều kiện làm việc phù hợp và khi đạt trạng thái FIX, công nghệ RTK có thể cung cấp tọa độ với độ chính xác ở mức centimet. Chính vì vậy, RTK đã trở thành một trong những công cụ quan trọng đối với nhiều kỹ sư khảo sát và xây dựng. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br />
<br />
Vậy vì sao máy GPS RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.<br />
</em><br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>I. Trạng thái FIX trong RTK là gì?</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công nghệ GNSS RTK, trạng thái FIX (Fixed Solution) là khi bộ thu đã giải được số nguyên chu kỳ sóng mang (<em>Integer Ambiguity</em>). Khi đó, hệ thống có thể xác định tọa độ với độ chính xác ở mức centimet trong điều kiện làm việc phù hợp.<br />
<br />
Thông thường, máy RTK sẽ hiển thị một trong các trạng thái sau:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Single: Định vị độc lập bằng tín hiệu vệ tinh, sai số thường ở mức vài mét.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DGPS/SBAS: Có dữ liệu hiệu chỉnh, độ chính xác được cải thiện so với Single nhưng chưa đạt mức RTK.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Float: Đã nhận dữ liệu cải chính nhưng chưa giải được hoàn toàn số nguyên chu kỳ sóng mang.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX: Định vị RTK với độ chính xác cao, đáp ứng phần lớn yêu cầu của công tác trắc địa.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lưu ý rằng, trạng thái FIX không đồng nghĩa với việc kết quả luôn chính xác tuyệt đối. Độ tin cậy của phép đo còn phụ thuộc vào điều kiện quan sát vệ tinh, môi trường làm việc, cấu hình hệ tọa độ và việc kiểm tra chất lượng số liệu ngoài thực địa.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 3 FIX.png" style="width: 620px; height: 566px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Không đủ vệ tinh hoặc hình học vệ tinh không thuận lợi</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để đạt được nghiệm FIX, máy RTK cần quan sát đồng thời đủ số lượng vệ tinh với sự phân bố hợp lý trên bầu trời. Máy có thể khó FIX hoặc FIX chậm khi làm việc trong các môi trường như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần nhà cao tầng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hẻm sâu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khu vực có nhiều cây lớn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dưới mái che hoặc trong nhà xưởng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa hình núi đá che khuất bầu trời.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài số lượng vệ tinh, chỉ số PDOP (Position Dilution of Precision) cũng ảnh hưởng đáng kể đến khả năng FIX. Dù quan sát được nhiều vệ tinh, nếu hình học vệ tinh không thuận lợi thì thời gian FIX vẫn có thể kéo dài hoặc nghiệm FIX kém ổn định.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 2 FIX.png" style="width: 600px; height: 400px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hiện tượng đa đường tín hiệu (Multipath)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đa đường tín hiệu là một trong những nguyên nhân phổ biến khiến máy RTK khó giữ FIX. Hiện tượng này xảy ra khi tín hiệu GNSS bị phản xạ qua các bề mặt như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tường kính.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhà thép tiền chế.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu kim loại.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xe ô tô hoặc container.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặt nước.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hàng rào thép.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi bộ thu nhận đồng thời tín hiệu trực tiếp và tín hiệu phản xạ, việc xác định pha sóng mang trở nên khó khăn hơn, khiến nghiệm RTK thiếu ổn định.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 5 FIX.png" style="width: 620px; height: 348px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Khoảng cách giữa Base và Rover quá lớn</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong hệ thống RTK Base – Rover truyền thống, khoảng cách giữa hai máy ảnh hưởng trực tiếp đến chất lượng dữ liệu cải chính. Trong điều kiện các yếu tố khác tương đương, khoảng cách giữa Base và Rover càng lớn thì việc giải nghiệm RTK thường càng khó khăn hơn.<br />
<br />
Khi khoảng cách tăng lên:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số tầng điện ly và tầng đối lưu giữa hai điểm tăng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mức độ tương quan của tín hiệu giảm.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian FIX có thể lâu hơn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giữ FIX giảm trong điều kiện khó.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK Network sử dụng CORS (VRS, iMAX hoặc Single Base), người dùng thường không làm việc với một trạm Base duy nhất. Khả năng FIX còn phụ thuộc vào mật độ mạng CORS, thuật toán xử lý của hệ thống và điều kiện quan sát vệ tinh.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 4 FIX.png" style="width: 620px; height: 410px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Kết nối Internet hoặc dữ liệu cải chính không ổn định</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi sử dụng RTK Network thông qua NTRIP, dữ liệu RTCM phải được truyền liên tục từ máy chủ CORS đến Rover. Một số nguyên nhân thường gặp gồm:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sóng 4G/5G yếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Wi-Fi không ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Server CORS bị gián đoạn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Age of Differential tăng cao.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, dữ liệu cải chính có thể bị trễ hoặc gián đoạn. Tùy từng hãng và từng dòng máy, một số thiết bị có thể duy trì nghiệm FIX trong thời gian ngắn nhờ các tính năng như RTK Hold, RTK Keep hoặc các cơ chế tương tự. Tuy nhiên, nếu việc gián đoạn kéo dài, máy thường sẽ chuyển sang FLOAT hoặc SINGLE.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Nhiễu điện từ và nhiễu vô tuyến</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS từ vệ tinh có công suất rất nhỏ khi đến mặt đất nên dễ bị ảnh hưởng bởi các nguồn nhiễu mạnh. Một số nguồn nhiễu thường gặp gồm:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạm BTS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radar.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường dây điện cao thế.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy phát sóng công suất lớn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống radio công nghiệp.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK sử dụng Radio UHF, nhiễu vô tuyến còn có thể làm giảm chất lượng liên lạc giữa Base và Rover.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 6 FIX.png" style="width: 620px; height: 411px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Anten GNSS bị che khuất hoặc lắp đặt chưa phù hợp</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng thu tín hiệu của máy RTK phụ thuộc rất nhiều vào vị trí đặt anten. Một số tình huống có thể làm giảm chất lượng tín hiệu gồm:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đứng quá sát tường.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt gần xe ô tô.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần mái tôn hoặc kết cấu kim loại.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten bị che bởi người đo.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cáp hoặc anten bị hư hỏng.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lựa chọn vị trí đặt máy thông thoáng luôn là một trong những giải pháp đơn giản nhưng mang lại hiệu quả cao.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Điều kiện khí quyển và hoạt động không gian</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS chịu ảnh hưởng của tầng điện ly và tầng đối lưu. Trong các thời điểm như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bão từ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Kp cao.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động điện ly mạnh.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">khả năng FIX có thể giảm so với điều kiện bình thường. Trong đa số trường hợp, mưa nhỏ không phải là nguyên nhân chính gây mất FIX.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 1 FIX.png" style="width: 620px; height: 413px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Firmware hoặc cấu hình máy chưa phù hợp<br />
</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các bản cập nhật firmware mới có thể:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cải thiện thuật toán RTK.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thêm tín hiệu GNSS mới.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khắc phục các lỗi đã được nhà sản xuất ghi nhận.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng khả năng tương thích với các chuẩn RTCM.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, một số cấu hình chưa phù hợp cũng có thể ảnh hưởng đến khả năng FIX, chẳng hạn như:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ bật một số hệ vệ tinh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập góc cắt vệ tinh chưa hợp lý.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai thông số truyền Radio giữa Base và Rover.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Người dùng nên cập nhật firmware theo khuyến nghị của nhà sản xuất và kiểm tra lại cấu hình trước khi làm việc ngoài hiện trường.</span></span><br />
<h3>
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">9. Hiệu năng của từng dòng máy RTK</span></h3>
<br />
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Không phải mọi bộ thu GNSS RTK đều có khả năng làm việc giống nhau. Hiệu năng của thiết bị phụ thuộc vào nhiều yếu tố như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thiết kế anten GNSS.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Chip xử lý tín hiệu.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thuật toán RTK.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Khả năng chống đa đường.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Tốc độ xử lý dữ liệu.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Mức độ tối ưu của phần mềm điều khiển.</span></span></li>
</ul>
<br />
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Vì vậy, ngay cả khi làm việc trong cùng điều kiện hiện trường, tốc độ FIX và khả năng giữ FIX giữa các dòng máy cũng có thể khác nhau.</span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10. Máy vẫn FIX nhưng tọa độ bị sai</span></span></h3>
<h3>
</h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi thường bị nhầm với hiện tượng "không FIX". Trong nhiều trường hợp, máy vẫn báo FIX bình thường nhưng tọa độ sai đáng kể do:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai hệ tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mô hình geoid.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai tham số chuyển đổi.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp tình huống này, cần kiểm tra lại cấu hình hệ quy chiếu trước khi nghi ngờ chất lượng tín hiệu GNSS.</span></span><br />
<p style="text-align: center;">
<br />
<img alt="" src="/admin/webroot/upload/image/images/Esurvey.jpg" style="width: 620px; height: 324px;" /></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Làm thế nào để cải thiện khả năng FIX?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để nâng cao khả năng FIX khi đo RTK, người dùng nên:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đo thông thoáng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế làm việc gần các bề mặt phản xạ mạnh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra số lượng vệ tinh và chỉ số PDOP.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo kết nối Internet hoặc Radio ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi chỉ số Age of Differential.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra đúng cấu hình hệ tọa độ trước khi đo.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cập nhật firmware theo khuyến nghị của nhà sản xuất.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra định kỳ anten và phụ kiện.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm trên các điểm khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ dựa vào trạng thái FIX, nên kiểm tra trên mốc khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác. <br />
<br />
>>> Máy GPS RTK không phải lúc nào cũng đạt trạng thái FIX ngay sau khi khởi động. Khả năng FIX phụ thuộc vào nhiều yếu tố như điều kiện quan sát vệ tinh, hiện tượng đa đường, chất lượng dữ liệu cải chính, kết nối Internet hoặc Radio, điều kiện khí quyển, cấu hình thiết bị và môi trường làm việc.<br />
<br />
Trong thực tế, trạng thái FIX là điều kiện cần nhưng chưa phải điều kiện đủ để khẳng định chất lượng kết quả đo. Bên cạnh việc theo dõi trạng thái FIX, người sử dụng vẫn nên kết hợp kiểm tra trên mốc khống chế, đo lặp các điểm quan trọng và đánh giá điều kiện hiện trường nhằm đảm bảo độ tin cậy của số liệu.<br />
<br />
Hiểu rõ các nguyên nhân trên sẽ giúp kỹ sư trắc địa xử lý nhanh các tình huống ngoài thực địa, lựa chọn phương án đo phù hợp và khai thác hiệu quả hơn công nghệ GNSS RTK.</span></span><br />
<br />
<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/TRẮC ĐỊA THÀNH ĐẠT (Logo) (Ảnh bìa Facebook).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 300px;" /></p>
<br />
<br />
<span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ ngay </span><a href="https://zalo.me/0949322456" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><span style="margin: 0px; padding: 0px; color: rgb(255, 102, 0);"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt qua Zalo</strong></span></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để được tư vấn chọn máy phù hợp nhất!</span>',
'images' => '20260625110358e00121db9ef2b0248aadce5ad04f0e9d.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân và cách khắc phục',
'meta_key' => '',
'meta_des' => 'Máy GPS RTK không FIX được hoặc thường xuyên chuyển giữa FIX và FLOAT? Tìm hiểu 10 nguyên nhân phổ biến như vệ tinh, CORS, Internet, Base, nhiễu tín hiệu và cách khắc phục hiệu quả.',
'created' => '2026-06-25',
'modified' => '2026-07-12',
'status' => '1',
'view' => '537',
'slug' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '553',
'rght' => '554',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 3 => array(
'Post' => array(
'id' => '820',
'name' => 'AI trong ngành trắc địa: Công việc nào sẽ được tự động hóa trước?',
'code' => null,
'alias' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span><o:p></o:p></p>
<p data-end="686" data-start="526">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang dần xuất hiện trong nhiều công đoạn của quy trình khảo sát và thành lập bản đồ.</span></span><o:p></o:p></p>
',
'content' => '<p>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span></em><br />
<br />
<o:p></o:p></p>
<p data-end="686" data-start="526">
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, phân loại dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang giúp giảm đáng kể thời gian xử lý dữ liệu và hỗ trợ kỹ sư đưa ra quyết định nhanh hơn. Tuy nhiên, một câu hỏi được nhiều người quan tâm là: </span></span></em><em style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Công việc nào trong ngành trắc địa sẽ được AI tự động hóa trước?</strong></em></p>
<p style="text-align: center;">
</p>
<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/Ai and BIM 2.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 450px; height: 299px;" /></p>
<br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong quá trình khảo sát và thành lập bản đồ, khối lượng dữ liệu thu thập được ngày càng lớn. Một chuyến bay UAV có thể tạo ra hàng nghìn ảnh chụp.<br />
<br />
Một dự án LiDAR có thể tạo ra hàng triệu đến hàng tỷ điểm Point Cloud. <br />
<br />
Các hệ thống quan trắc hiện đại có thể ghi nhận dữ liệu liên tục 24/7.<br />
<br />
Khối lượng dữ liệu này vượt xa khả năng xử lý thủ công của con người. Đây chính là môi trường lý tưởng để AI phát huy hiệu quả. Theo nhiều nghiên cứu gần đây, AI đặc biệt phù hợp với các nhiệm vụ nhận dạng mẫu, phân loại dữ liệu, phát hiện bất thường và tự động hóa các quy trình xử lý lặp lại.</span></span><br />
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">A. AI đang được ứng dụng như thế nào trong trắc địa?</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Xử lý dữ liệu UAV và ảnh viễn thám</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lĩnh vực phát triển nhanh nhất hiện nay. AI có thể hỗ trợ:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng nhà cửa, đường giao thông và cây xanh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động phân loại lớp phủ bề mặt.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện thay đổi địa hình qua nhiều thời điểm.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thành lập bản đồ hiện trạng.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều nghiên cứu đã chứng minh AI có khả năng tự động nhận dạng và trích xuất đối tượng từ ảnh UAV với độ chính xác cao, giúp giảm đáng kể khối lượng công việc số hóa thủ công.</span></span><br />
<br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and UAV.jpg" style="width: 600px; height: 336px;" /></span></span></p>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Xử lý Point Cloud và LiDAR</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong các dự án quét laser mặt đất hoặc UAV LiDAR, việc phân loại Point Cloud thường tiêu tốn rất nhiều thời gian.<br />
AI hiện có thể:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tách điểm mặt đất.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại cây xanh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng công trình xây dựng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo mô hình 3D bán tự động.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số hệ thống hiện nay còn có khả năng xử lý dữ liệu LiDAR gần như theo thời gian thực và tự động phân loại địa vật với mức can thiệp thủ công rất thấp.</span></span><br />
<br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and Lidar.jpg" style="width: 500px; height: 333px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Thành lập và cập nhật bản đồ</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong lĩnh vực GIS và bản đồ, AI đang được ứng dụng để:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động số hóa đối tượng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất ranh giới địa vật.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lỗi dữ liệu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện các bất thường về hình học và thuộc tính.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các nghiên cứu về bản đồ địa chính và bản đồ nền cho thấy AI có tiềm năng rút ngắn đáng kể thời gian thành lập và cập nhật dữ liệu bản đồ.</span></span><br />
<br />
<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/Ai and Mapping(1).jpg" style="width: 600px; height: 300px;" /></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Quan trắc công trình và giám sát biến dạng</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các công trình cầu, đập, nhà cao tầng hoặc mỏ khai thác, dữ liệu quan trắc thường được thu thập liên tục trong thời gian dài AI có thể giúp:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện số liệu bất thường.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi xu hướng chuyển vị.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự báo nguy cơ lún hoặc nghiêng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ cảnh báo sớm.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây được xem là một trong những hướng ứng dụng có tiềm năng lớn vì AI rất giỏi trong việc phát hiện các quy luật ẩn trong tập dữ liệu dài hạn.</span></span><br />
<br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and monitoring.jpg" style="width: 600px; height: 335px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Công việc văn phòng</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu phải lựa chọn một nhóm công việc có khả năng được AI tự động hóa trước trong ngành trắc địa, thì đó có lẽ là các công việc văn phòng mang tính lặp lại và xử lý dữ liệu. Các công việc như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu giữa các định dạng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tổng hợp số liệu đo đạc.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra các lỗi dữ liệu đơn giản.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu, bảng biểu và báo cáo kỹ thuật.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất thông tin từ nhật ký hoặc sổ đo.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại và sắp xếp dữ liệu dự án.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những công việc có quy trình tương đối rõ ràng và ít phụ thuộc vào đánh giá chuyên môn của kỹ sư. Trên thực tế, nhiều phần mềm hiện nay đã bắt đầu tích hợp các tính năng tự động hóa dạng này. AI chỉ đang giúp các quy trình đó trở nên thông minh và hiệu quả hơn.</span></span><br />
<br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ai and office.jpg" style="width: 600px; height: 336px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">B. Công việc nào khó bị AI thay thế?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực tế hiện nay, đây có lẽ là nhóm ứng dụng AI gần gũi nhất với nhiều kỹ sư trắc địa. Thay vì mất hàng giờ để viết các công cụ Excel, Python hoặc VBA, nhiều kỹ sư đã bắt đầu sử dụng AI để hỗ trợ:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Viết chương trình chuyển đổi tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán stakeout tim tuyến, cọc khoan nhồi.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra dữ liệu đo đạc.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển ảnh sổ đo thành bảng tính.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu nghiệm thu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Soạn thảo báo cáo kỹ thuật.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AI không thực hiện thay công việc chuyên môn, nhưng có thể giúp rút ngắn đáng kể thời gian xử lý các công việc lặp lại.<br />
<br />
>>> Nếu GNSS giúp người làm trắc địa đo nhanh hơn, UAV giúp thu thập dữ liệu nhanh hơn thì AI có thể giúp xử lý dữ liệu nhanh hơn.</span></span>
<p data-end="2115" data-start="1963">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong tương lai gần, lợi thế có thể không nằm ở việc ai sử dụng AI hay không, mà nằm ở việc ai biết khai thác AI hiệu quả hơn trong công việc hàng ngày. </span></span><br />
<br />
<strong><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="text-align: justify; margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span></strong></p>
',
'images' => '20260617172058d2979529aed88d220bef4d1f33c5f441.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'AI trong trắc địa: Công việc nào sẽ được tự động hóa trước?',
'meta_key' => '',
'meta_des' => 'AI đang được ứng dụng ngày càng nhiều trong ngành trắc địa, từ xử lý UAV, LiDAR, bản đồ đến lập báo cáo kỹ thuật. Vậy công việc nào sẽ được AI tự động hóa trước? Tìm hiểu trong bài viết này.',
'created' => '2026-06-17',
'modified' => '2026-07-11',
'status' => '1',
'view' => '670',
'slug' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '551',
'rght' => '552',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 4 => array(
'Post' => array(
'id' => '819',
'name' => 'BIM và LiDAR đang dùng những định dạng dữ liệu nào? Giải thích IFC, RVT, NWD, LAS, LAZ từ A-Z',
'code' => null,
'alias' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.</span></span><br />
',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.<br />
<br />
Vậy các định dạng này dùng để làm gì và khác nhau như thế nào?</em></span></span><br />
<br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Nhóm dữ liệu BIM</span></span></h2>
<br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 IFC (Industry Foundation Classes)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC là định dạng trao đổi dữ liệu BIM mở được phát triển bởi buildingSMART. Mục đích chính của IFC là cho phép các phần mềm BIM khác nhau trao đổi mô hình với nhau mà không phụ thuộc vào một hãng phần mềm cụ thể.</span></span><br />
<br />
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>- Ưu điểm:</strong> Không phụ thuộc vào một nhà cung cấp phần mềm cụ thể, hỗ trợ phối hợp giữa nhiều bộ môn và phù hợp cho việc bàn giao, lưu trữ dữ liệu dự án trong thời gian dài.</span></span><br />
<br />
<o:p></o:p></p>
<p data-end="608" data-start="295">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="307" data-start="295">- Hạn chế:</strong> Không phải phần mềm BIM nào cũng hỗ trợ đầy đủ mọi tính năng của IFC. Trong một số trường hợp, các tham số đối tượng, Family phức tạp hoặc dữ liệu chuyên biệt có thể bị mất hoặc thay đổi khi chuyển đổi. Ngoài ra, khả năng tương thích còn phụ thuộc vào phiên bản IFC sử dụng (IFC2x3, IFC4, IFC4.3...).</span></span><br />
<br />
<o:p></o:p></p>
<p data-end="858" data-start="613">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="634" data-start="613">- Ứng dụng thực tế:</strong> IFC thường được sử dụng để trao đổi dữ liệu giữa các bộ môn, bàn giao mô hình BIM cho chủ đầu tư và lưu trữ dữ liệu dự án theo định dạng mở (vendor-neutral), giúp giảm sự phụ thuộc vào một phần mềm hoặc nhà cung cấp cụ thể.</span></span><o:p></o:p></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Autodesk Revit, Tekla Structures, Archicad, Bentley OpenBuildings đều có thể xuất hoặc nhập file IFC nên IFC thường được xem là "ngôn ngữ chung" của BIM.</span></span><br />
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 BCF (BIM Collaboration Format)</span></span></h3>
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">BCF được sử dụng để trao đổi các vấn đề (Issue), bình luận (Comment), góc nhìn (Viewpoint) và vị trí cần xử lý trong mô hình BIM. BCF không chứa mô hình 3D mà chỉ lưu thông tin phục vụ quá trình phối hợp giữa các bên.</span>
<p>
<br />
<strong data-end="337" data-start="325" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Dung lượng nhỏ, dễ chia sẻ và tích hợp với nhiều nền tảng BIM như Autodesk Construction Cloud (BIM 360), Solibri, Tekla BIMsight và các hệ thống quản lý Issue khác. BCF đặc biệt hữu ích trong các cuộc họp phối hợp (Coordination Meeting), kiểm tra va chạm (Clash Detection) và quy trình QA/QC.</span></p>
<p data-end="630" data-start="325">
<br />
<strong data-end="653" data-start="635" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Lưu ý thực tế:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> BCF thường được sử dụng kèm với các file mô hình như IFC, RVT hoặc NWD để người dùng có thể xem đầy đủ bối cảnh của vấn đề. Một ưu điểm quan trọng của BCF là khả năng theo dõi lịch sử xử lý (Traceability), giúp liên kết giữa vấn đề được phát hiện, người phụ trách và các thay đổi được thực hiện trong dự án.</span></p>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 RVT</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RVT là định dạng dự án của Autodesk Revit. Một file RVT có thể chứa:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiến trúc</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống MEP</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin BIM</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số vật liệu</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng BIM được sử dụng rất phổ biến hiện nay.</span></span><br />
<br />
<p data-end="355" data-start="108">
<strong data-end="372" data-start="360" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Lưu giữ đầy đủ tham số đối tượng, lịch sử làm việc, Worksharing và các thông tin thiết kế chi tiết. RVT là định dạng mang lại khả năng làm việc đầy đủ nhất trong môi trường Revit.</span></p>
<p data-end="552" data-start="360">
</p>
<p data-end="808" data-start="557">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="569" data-start="557">Hạn chế:</strong> RVT là định dạng độc quyền (proprietary) của Autodesk. Các phần mềm BIM khác thường không thể đọc hoặc khai thác đầy đủ toàn bộ thông tin trong file RVT. Vì vậy, khi cần phối hợp đa nền tảng, người dùng thường phải xuất sang IFC hoặc NWD.</span></span><br />
</p>
<p data-end="1161" data-start="813">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="831" data-start="813">Lưu ý thực tế:</strong> RVT thường được sử dụng trong nội bộ đơn vị thiết kế hoặc giữa các bên cùng sử dụng Revit. Khi cần trao đổi dữ liệu với chủ đầu tư, nhà thầu hoặc các đơn vị sử dụng phần mềm khác, IFC thường là lựa chọn phổ biến để bàn giao mô hình BIM, trong khi NWD thường được sử dụng cho công tác phối hợp và kiểm tra mô hình trên Navisworks.</span></span></p>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 RFA</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA là định dạng Family của Revit. Family có thể hiểu là thư viện các đối tượng BIM như:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa sổ</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị điện</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị cơ điện</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA tương tự như Block trong AutoCAD nhưng có nhiều thông tin tham số hơn.<br />
<br />
<strong>Ưu điểm</strong>: RFA cho phép mô tả đối tượng bằng các tham số chi tiết như kích thước, vật liệu, mã thiết bị và thông tin kỹ thuật. Nhờ đó, các đối tượng có thể dễ dàng tái sử dụng giữa nhiều dự án khác nhau, đồng thời giúp chuẩn hóa dữ liệu BIM trong doanh nghiệp.<br />
<br />
<strong>Hạn chế</strong>: RFA là định dạng riêng của Revit nên chủ yếu hoạt động trong hệ sinh thái Autodesk. Khi xuất sang IFC, các Family phức tạp có thể bị đơn giản hóa hoặc mất một phần tham số do sự khác biệt giữa các chuẩn dữ liệu BIM.<br />
<br />
<strong>Lưu ý</strong>: Nên tiêu chuẩn hóa thư viện Family trước khi triển khai dự án hoặc bàn giao dữ liệu. Đối với các Family quan trọng, cần quản lý phiên bản (Version Control) và tài liệu hóa các tham số chính để đảm bảo tính nhất quán giữa các bộ môn và các giai đoạn của dự án.</span></span><br />
<br />
<h3>
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.5 RTE</span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTE là định dạng Template của Revit. Đây là file mẫu được sử dụng khi khởi tạo dự án mới nhằm đảm bảo tiêu chuẩn hóa:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Family</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy ước đặt tên</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số dự án</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/BIM 2(1).jpg" style="width: 662px; height: 463px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Nhóm dữ liệu Navisworks</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 NWD</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD là định dạng mô hình tổng hợp của Autodesk Navisworks. File NWD có thể chứa:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều mô hình BIM</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Clash Detection</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Markup</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu phối hợp</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng thường được sử dụng trong các cuộc họp BIM hoặc bàn giao mô hình.</span></span>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 NWC</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWC là định dạng trung gian của Navisworks. File NWC thường nhẹ hơn NWD và được sử dụng để tăng tốc quá trình nạp mô hình.<br />
Nhiều dự án BIM sử dụng NWC làm định dạng trao đổi nội bộ giữa các bộ môn.</span></span><br />
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.3 NWV</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWV là định dạng Viewpoint của Navisworks. Nó lưu các thông tin về:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái hiển thị</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thiết lập quan sát mô hình</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với NWD hoặc NWC, NWV ít được sử dụng hơn.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Navisworks.jpg" style="width: 680px; height: 392px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Nhóm dữ liệu Point Cloud</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 LAS (LASer File Format)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS là định dạng tiêu chuẩn lưu trữ dữ liệu Point Cloud từ công nghệ LiDAR. Mỗi điểm trong file LAS có thể chứa:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Y</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Z</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Intensity</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GPS Time</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Classification</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Màu RGB</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS thường được tạo ra từ: UAV LiDAR; Mobile Mapping; SLAM Scanner; Máy quét laser mặt đất (TLS); LiDAR hàng không. Một file LAS có thể chứa từ hàng triệu đến hàng trăm triệu điểm.</span></span><br />
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 LAZ</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAZ là phiên bản nén của LAS. Tương tự như DXF, DWG; ZIP và thư mục dữ liệu. <br />
<br />
LAZ giúp giảm đáng kể dung lượng lưu trữ nhưng vẫn giữ nguyên thông tin Point Cloud. Hiện nay phần lớn các dự án LiDAR đều sử dụng LAZ để tối ưu dung lượng và tốc độ truyền dữ liệu.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lidar format.jpg" style="width: 565px; height: 353px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. So sánh nhanh các nhóm dữ liệu</span></span></h2>
<br />
<table border="1" cellpadding="0" cellspacing="3" style="width: 100%">
<tbody>
<tr>
<td style="width: 128px; text-align: center;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nhóm dữ liệu</strong></span></span></td>
<td style="width: 160px; text-align: center;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Định dạng phổ biến</strong></span></span></td>
<td style="width: 212px; text-align: center;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Mục đích</strong></span></span></td>
</tr>
<tr>
<td style="width:128px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ điểm</span></span></td>
<td style="width:160px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td>
<td style="width:212px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý điểm đo, stakeout</span></span></td>
</tr>
<tr>
<td style="width:128px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CAD</span></span></td>
<td style="width:160px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF, DWG</span></span></td>
<td style="width:212px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Bản vẽ kỹ thuật 2D/3D</span></span></td>
</tr>
<tr>
<td style="width:128px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">BIM</span></span></td>
<td style="width:160px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC, RVT, RFA, RTE, BCF</span></span></td>
<td style="width:212px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình công trình số</span></span></td>
</tr>
<tr>
<td style="width:128px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Navisworks</span></span></td>
<td style="width:160px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD, NWC, NWV</span></span></td>
<td style="width:212px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Phối hợp và kiểm tra mô hình</span></span></td>
</tr>
<tr>
<td style="width:128px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Cloud</span></span></td>
<td style="width:160px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS, LAZ</span></span></td>
<td style="width:212px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu quét laser và LiDAR</span></span></td>
</tr>
</tbody>
</table>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Sự phát triển của BIM, UAV LiDAR và công nghệ quét laser 3D đang làm thay đổi cách dữ liệu được tạo ra và sử dụng trong ngành xây dựng.<br />
<br />
Nếu CSV và DXF vẫn là những định dạng quen thuộc đối với kỹ sư đo đạc thì IFC, RVT, NWD hay LAS đang trở thành những định dạng ngày càng phổ biến trong các dự án hiện đại.<br />
<br />
Việc hiểu được chức năng của từng loại dữ liệu sẽ giúp kỹ sư lựa chọn đúng định dạng, trao đổi thông tin hiệu quả hơn và tránh nhiều sai sót trong quá trình triển khai dự án.</span></span><br />
<br />
<h2 data-end="2546" data-start="2275" id="lien-he-trac-dia-thanh-dat-de-duoc-tu-van-giai-phap-phu-hop-voi-tung-loai-cong-trinh" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span><br />
<br />
<span style="display: none;"> </span><span style="display: none;"> </span><img alt="" src="/admin/webroot/upload/image/images/bim 5.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; color: rgb(34, 34, 34); width: 678px; height: 452px;" /><span style="display: none;"> </span><span style="display: none;"> </span></h2>
<p>
</p>
',
'images' => '2026061315274748a34b386d28d2887f07eb97a60c9540.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Ngoài CSV và DXF: Tìm hiểu các định dạng IFC, RVT, NWD, LAS trong BIM và quét laser 3D',
'meta_key' => '',
'meta_des' => 'iFC, RVT, NWD, LAS, LAZ là gì? Tìm hiểu các định dạng dữ liệu BIM, Navisworks và Point Cloud phổ biến trong xây dựng, đo đạc, UAV LiDAR và quét laser 3D.',
'created' => '2026-06-13',
'modified' => '2026-07-12',
'status' => '1',
'view' => '810',
'slug' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '549',
'rght' => '550',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 5 => array(
'Post' => array(
'id' => '818',
'name' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?',
'code' => null,
'alias' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<p>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></p>
<p>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></p>
',
'content' => '<p>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></em></p>
<p>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></em></p>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Từ cuộc đua vệ tinh đến cuộc đua trải nghiệm ngoài thực địa</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng 10 năm trước, khi một hãng giới thiệu thế hệ máy GNSS RTK mới, những thông số thường được nhắc đến nhiều nhất là:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi được bao nhiêu kênh vệ tinh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ những hệ thống GNSS nào.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX nhanh hơn bao nhiêu giây.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao hơn bao nhiêu milimet.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời điểm đó, đây thực sự là những yếu tố tạo nên sự khác biệt giữa các sản phẩm trên thị trường. Các hãng liên tục nâng số lượng kênh từ vài trăm lên hàng nghìn kênh. Những hệ thống mới như Galileo, BeiDou hay QZSS lần lượt được bổ sung. Công nghệ xử lý tín hiệu cũng ngày càng hoàn thiện.<br />
<br />
Tuy nhiên, khi nhìn vào thị trường hiện nay, có thể thấy cuộc đua đó đang dần thay đổi. Hầu hết các dòng RTK hiện đại đều đã hỗ trợ đa hệ vệ tinh, đa tần số và có khả năng đạt độ chính xác centimet trong điều kiện làm việc bình thường. Khi khoảng cách công nghệ về phần cứng GNSS ngày càng thu hẹp, các hãng bắt đầu tìm kiếm một hướng đi mới - Đó là nâng cao trải nghiệm làm việc ngoài thực địa.<br />
</span></span>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Điều mà kỹ sư đo đạc thực sự quan tâm là gì?</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với người sử dụng máy RTK ngoài công trường, câu hỏi quan trọng nhất thường không phải: "Máy này theo dõi được bao nhiêu vệ tinh?" mà là:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi hoàn thành công việc nhanh hơn không?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi đo được những vị trí khó không?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm được thời gian đi lại ngoài hiện trường không?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm số lượng thiết bị phải mang theo không?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp công việc an toàn hơn không?</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây chính là lý do nhiều công nghệ mới xuất hiện trong vài năm gần đây.<br />
<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. IMU – Bước thay đổi đầu tiên</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một trong những cải tiến có ảnh hưởng lớn nhất là công nghệ IMU. Trước đây, việc giữ sào GNSS thẳng đứng gần như là yêu cầu bắt buộc.<br />
Những vị trí như: chân tường, góc công trình, mép hàng rào hay khu vực cây cối thường gây khó khăn cho người đo. Nhưng IMU đã thay đổi hoàn toàn cách làm việc này. Người sử dụng có thể nghiêng sào trong một phạm vi nhất định mà vẫn duy trì được độ chính xác cao.<br />
<br />
Ngày nay, bù nghiêng gần như đã trở thành tính năng tiêu chuẩn trên các dòng RTK mới.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (1).png" style="width: 680px; height: 383px;" /></span></span></p>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Camera – Khi RTK bắt đầu "nhìn thấy" hiện trường</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau IMU, các hãng tiếp tục đưa camera lên Rover GNSS. Ban đầu, nhiều người cho rằng đây chỉ là một tính năng mang tính trình diễn công nghệ.<br />
Tuy nhiên, thực tế camera đã mở ra nhiều ứng dụng mới:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhận hiện trạng công trình.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo điểm từ ảnh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout bằng thực tế tăng cường (AR).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại dữ liệu sau khi khảo sát.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này giúp RTK không chỉ cung cấp tọa độ mà còn lưu giữ được bối cảnh thực tế của hiện trường.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (2).png" style="width: 680px; height: 678px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Laser Survey – Xu hướng đáng chú ý nhất hiện nay</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu IMU giúp người dùng đo nghiêng và camera giúp ghi nhận hình ảnh, thì Laser Survey đang hướng tới một mục tiêu khác. Đó là đo được những vị trí mà trước đây Rover GNSS khó hoặc không thể tiếp cận.<br />
Hãy hình dung một số tình huống quen thuộc mà anh em có thể gặp khi trực tiếp đo ngoài công trình: <br />
- Mép taluy cao.<br />
- Hồ điều hòa.<br />
- Bờ kênh.<br />
- Hố đào sâu.<br />
- Mái nhà.<br />
- Tường chắn.<br />
- Khu vực đang thi công nguy hiểm.<br />
<br />
Với RTK truyền thống, muốn lấy tọa độ chính xác, người đo thường phải đưa sào đến tận vị trí cần đo. Điều này không phải lúc nào cũng thuận lợi hoặc an toàn. Laser Survey ra đời để giải quyết vấn đề đó. Thay vì đưa anten GNSS đến điểm đo, người sử dụng chỉ cần hướng tia laser đến mục tiêu. Phần mềm sẽ kết hợp dữ liệu từ GNSS, IMU và laser để tính toán tọa độ của điểm cần khảo sát.</span></span><br />
<p data-end="1209" data-start="1006">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tất nhiên, việc đo các vị trí khó tiếp cận bằng tia laser không phải là điều hoàn toàn mới trong ngành đo đạc. Máy toàn đạc điện tử đã sử dụng công nghệ đo không gương (Reflectorless) từ nhiều năm trước. Điểm khác biệt là Laser Survey đang đưa khả năng này lên nền tảng Rover GNSS, cho phép người dùng vừa khai thác ưu thế định vị vệ tinh ngoài hiện trường, vừa thực hiện các phép đo từ xa trong những tình huống mà trước đây thường phải kết hợp thêm máy toàn đạc hoặc các thiết bị khác.</span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lý do nhiều chuyên gia nhận định rằng Laser Survey có thể là một trong những bước phát triển đáng chú ý nhất của Rover GNSS trong những năm gần đây.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/i85-gnss-imu-dual-cameras-laser-land-surveying.jpg" style="width: 472px; height: 354px;" /></span></span></p>
<br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>6. Vì sao các hãng TQ đầu tư mạnh vào hướng đi này?</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một lý do quan trọng là thị trường đã thay đổi. Trước đây, người mua thường so sánh:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu kênh vệ tinh?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu tần số?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác bao nhiêu milimet?</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngày nay, người dùng bắt đầu quan tâm nhiều hơn đến các yếu tố như:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Năng suất làm việc.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trải nghiệm sử dụng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính linh hoạt ngoài thực địa.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giải quyết các tình huống thực tế.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này khiến các hãng phải chuyển hướng nghiên cứu: không chỉ phát triển bộ thu GNSS tốt hơn, mà còn phải tìm cách giúp người dùng làm việc hiệu quả hơn.<br />
</span></span>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>7. RTK đang dần trở thành nền tảng tích hợp cảm biến</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu quan sát sự phát triển của các thế hệ RTK gần đây, có thể thấy một xu hướng rất rõ. RTK không còn đơn thuần là thiết bị thu tín hiệu vệ tinh mà nó đang trở thành một nền tảng tích hợp nhiều cảm biến:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IMU.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Laser.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công nghệ xử lý hình ảnh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thuật toán tự động hóa và trí tuệ nhân tạo (AI).</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi công nghệ đều nhằm giải quyết một khó khăn cụ thể ngoài công trường.</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image(1).png" style="width: 680px; height: 680px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Có thể nói, khi khả năng thu tín hiệu GNSS giữa các thế hệ thiết bị ngày càng tiệm cận nhau, cuộc cạnh tranh của các hãng đang dần chuyển sang một hướng mới: giúp kỹ sư hoàn thành công việc nhanh hơn, an toàn hơn và thuận tiện hơn ngoài thực địa.</span></span>
<p data-end="2546" data-start="2275">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera, IMU và Laser Survey có thể chỉ là những bước khởi đầu cho xu hướng đó. Trong tương lai, GNSS RTK nhiều khả năng sẽ không chỉ là thiết bị định vị vệ tinh, mà sẽ trở thành một nền tảng tích hợp nhiều cảm biến phục vụ công tác khảo sát và thi công ngoài hiện trường. </span></span><br />
</p>
<h2 data-end="2546" data-start="2275">
<span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt </strong></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">để được tư vấn và hỗ trợ tốt nhất!</span></h2>
',
'images' => '2026061214390046f6215956d7c46255d00263c715c9d4.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng Trung Quốc chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?',
'meta_key' => '',
'meta_des' => 'Khám phá xu hướng phát triển mới của các hãng GNSS RTK như CHCNAV, eSurvey và nhiều thương hiệu khác. Từ IMU, Camera đến Laser Survey, cuộc đua công nghệ đang chuyển từ phần cứng GNSS sang nâng cao trải nghiệm làm việc ngoài thực địa.',
'created' => '2026-06-12',
'modified' => '2026-07-11',
'status' => '1',
'view' => '778',
'slug' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '547',
'rght' => '548',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 6 => array(
'Post' => array(
'id' => '817',
'name' => 'Định dạng file RTK: Hướng dẫn xuất, nhập và xử lý lỗi thường gặp trong đo đạc',
'code' => null,
'alias' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.</span></span>',
'content' => '<p>
<em><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong thực tế, công việc đo đạc không kết thúc khi Rover báo FIX hoặc khi hoàn thành việc thu thập tọa độ ngoài hiện trường. Sau bước đo đạc, dữ liệu thường phải trải qua nhiều công đoạn như:</span></em><br />
</p>
<ul>
<li>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển về văn phòng.</span></span></em></li>
<li>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biên tập trên AutoCAD hoặc CASS.</span></span></em></li>
<li>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý trên Civil 3D, Trimble Business Center (TBC), Leica Infinity.</span></span></em></li>
<li>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra trên Google Earth.</span></span></em></li>
<li>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển giao cho chủ đầu tư hoặc đơn vị thiết kế.</span></span></em></li>
</ul>
<br />
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ cần xuất sai định dạng hoặc thiếu dữ liệu, toàn bộ quy trình phía sau có thể bị gián đoạn. Theo tài liệu của Trimble Business Center, hệ sinh thái khảo sát hiện nay hỗ trợ rất nhiều định dạng khác nhau như CSV, TXT, DXF, DWG, KML, SHP, XML, JOB, RINEX... phục vụ các mục đích sử dụng khác nhau.<br />
</span></span></em>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/61sq3Qk7zvL.jpg" style="width: 600px; height: 600px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Các định dạng file dữ liệu phổ biến ở máy RTK</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 CSV (*.csv)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV (Comma Separated Values) là định dạng được sử dụng nhiều nhất trong công tác đo đạc hiện nay. Thông thường file CSV có thể chứa:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số hiệu điểm (Point ID)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting (X)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing (Y)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation (H)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Code</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi chú</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ: </strong></u> Point,X,Y,H,Code<br />
P1,234567.123,1234567.456,15.234,COTDIEN</em><br />
<br />
<u><strong>Ưu điểm</strong></u></span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở được bằng Excel.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dung lượng nhỏ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ gửi Email, Zalo.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ nhập vào Civil 3D, AutoCAD, QGIS, TBC.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><u><strong>Nhược điểm</strong></u></span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có tiêu chuẩn cấu trúc thống nhất.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hai file CSV có thể chứa các trường dữ liệu khác nhau.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Leica Captivate và CHCNAV LandStar, người dùng có thể tự định nghĩa cấu trúc CSV xuất ra bằng cách thêm hoặc bớt các trường dữ liệu cần thiết.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên.png" style="width: 480px; height: 480px;" /> </span></span></p>
<p style="text-align: center;">
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ví dụ về File tọa độ mốc</span></span></em></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 TXT (*.txt)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">TXT là file dữ liệu dạng văn bản thuần và thường được sử dụng khi:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển dữ liệu giữa các phần mềm.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập dữ liệu stakeout.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉnh sửa thủ công bằng Notepad hoặc Notepad++.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ưu điểm lớn nhất là khả năng tùy biến cấu trúc dữ liệu.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 DAT (*.dat)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT là định dạng quen thuộc với nhiều đơn vị thành lập bản đồ địa hình với nhiều ứng dụng như:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AutoCAD.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CASS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập bản đồ địa hình.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại Việt Nam, DAT vẫn là định dạng được sử dụng rất nhiều trong công tác đo vẽ địa hình.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 DXF (*.dxf)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF là định dạng trao đổi dữ liệu CAD. Theo Leica Captivate, DXF được sử dụng để chuyển trực tiếp điểm, đường, layer và các đối tượng CAD giữa hiện trường và văn phòng.<br />
<br />
<strong><u>Ưu điểm</u></strong></span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở trực tiếp trên AutoCAD.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không cần nhập tọa độ thủ công.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giữ được nhiều thông tin bản vẽ.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5 KML (*.kml)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML là định dạng của Google Earth với nhiều ứng dụng như:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra vị trí điểm ngoài thực địa.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối chiếu dữ liệu khảo sát.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ nhanh vị trí công trình.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Trimble, KML/KMZ là một trong những định dạng phổ biến để trao đổi dữ liệu tọa độ địa lý 3D.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.6 SHP (*.shp)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP (Shapefile) là định dạng GIS được sử dụng trong:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">QGIS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ArcGIS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống quản lý dữ liệu không gian.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica Captivate còn cho phép xuất thêm các trường chất lượng điểm đo và thông tin tọa độ vào Shapefile.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7 XLS / XLSX</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số phần mềm cho phép xuất trực tiếp sang Excel với ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ chỉnh sửa.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ lập bảng tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp cho hồ sơ hoàn công.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Khi nào nên chọn CSV, DAT, DXF hay SHP?</span></span></h2>
<br />
<table border="0" cellpadding="0" style="width: 100%">
<tbody>
<tr>
<td>
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mục đích</span></span></strong><br />
</td>
<td>
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng khuyến nghị</span></span></strong><br />
</td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gửi tọa độ cho chủ đầu tư</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, XLSX</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập AutoCAD</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT, DXF</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập Civil 3D</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Google Earth</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GIS</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout công trình</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ dữ liệu nhanh</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV</span></span></td>
</tr>
</tbody>
</table>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/c64e8674de5294e51c9bd4133e27d964aede72fb_2_1024x516.png" style="width: 600px; height: 302px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Hướng dẫn xuất dữ liệu trên máy RTK</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù giao diện giữa Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay Matesurvey (Geomate) có khác nhau nhưng quy trình cơ bản tương đối giống nhau với các bước như sau:<br />
<br />
- <strong>Bước 1</strong>: Mở Project hoặc Job cần xuất.<br />
<br />
- <strong>Bước 2</strong>: Kiểm tra danh sách điểm đã lưu.<br />
<br />
- <strong>Bước 3</strong>:Chọn Export Data.<br />
<br />
- <strong>Bước 4</strong>: Chọn định dạng: <em>CSV; ;TXT; DAT; DXF; KML ; SHP</em><br />
<br />
- <strong>Bước 5</strong>: Kiểm tra cấu trúc dữ liệu xuất. Một số phần mềm cho phép tùy chỉnh:<br />
<em>Point ID<br />
Easting<br />
Northing<br />
Elevation<br />
Code<br />
Rod Height<br />
Antenna Height<br />
PDOP<br />
Trạng thái FIX/FLOAT</em><br />
<br />
- <strong>Bước 6</strong>: Lưu file và kiểm tra lại trước khi gửi.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Hướng dẫn nhập dữ liệu vào máy RTK</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài việc xuất dữ liệu từ máy RTK, nhu cầu nhập dữ liệu vào máy để phục vụ công tác bố trí công trình (Stake Out), dẫn đường hoặc kiểm tra tọa độ cũng rất phổ biến. Hiện nay hầu hết các phần mềm đo đạc như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey), MateSurvey (Geomate) đều hỗ trợ nhập các định dạng phổ biến như:CSV (*.csv); TXT (*.txt); DXF (*.dxf). Trong đó CSV là định dạng được sử dụng nhiều nhất.<br />
<br />
<strong>- Bước 1: </strong>Chuẩn bị File dữ liệu<br />
Xuất dữ liệu từ:AutoCAD; Civil 3D; Excel; QGIS; TBC; Leica Infinityvề định dạng CSV hoặc TXT.<br />
<br />
<strong>- Bước 2: </strong>Chép File vào sổ tay<br />
Có thể thực hiện bằngcáp USB, bluetooth, Wi-Fi, đồng bộ Cloud (tùy thiết bị).<br />
<br />
<strong>- Bước 3: </strong>Nhập dữ liệu<br />
Project > Import > Chọn định dạng file > Chọn file cần nhập.<br />
<br />
<strong>- Bước 4: </strong>Khai báo cấu trúc dữ liệu<br />
Đây là bước quan trọng nhất.Người dùng cần khai báo chính xác:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Point ID</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Easting (X)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Northing (Y)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Elevation (H)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Code</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Leica Captivate và Trimble Access, khi nhập dữ liệu cần kiểm tra chính xác thứ tự cột dữ liệu để tránh sai lệch tọa độ.<br />
</span></span><br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Những lỗi thường gặp khi nhập và xuất dữ liệu RTK</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù việc xuất và nhập dữ liệu trên các phần mềm như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay MateSurvey (Geomate) tương đối đơn giản, nhưng thực tế ngoài công trường vẫn thường xuyên phát sinh các lỗi làm mất thời gian xử lý dữ liệu hoặc thậm chí ảnh hưởng đến kết quả thi công.<br />
Dưới đây là những lỗi phổ biến nhất.</span></span><br />
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.1 Xuất file thành công nhưng mở ra không có dữ liệu</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá nhiều người dùng RTK từng gặp với các biểu hiện như:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File được tạo thành công.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có tên dự án hoặc tiêu đề file.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có điểm tọa độ bên trong.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường gặp:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Project hoặc Job.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Data File.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đang bật bộ lọc dữ liệu (Filter).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai loại điểm cần xuất.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Database không chứa dữ liệu.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br />
- Kiểm tra lại Point Database.<br />
- Kiểm tra đúng Project đang làm việc.<br />
- Tắt các bộ lọc dữ liệu trước khi xuất.<br />
- Chọn xuất toàn bộ điểm (All Points).<br />
</span></span><br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.2 File đuôi .CSV mở ra bằng excel nhưng hiển thị trống hoặc sai cột</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biểu hiện thường thấy:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File vẫn có dung lượng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel mở được nhưng dữ liệu dồn vào một cột.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tưởng rằng file bị lỗi hoặc mất dữ liệu.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel đọc sai dấu phân cách dữ liệu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File sử dụng dấu "," trong khi máy tính đang cấu hình dấu ";" hoặc ngược lại.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mã hóa ký tự (Encoding).</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br />
- Mở thử bằng Notepad hoặc Notepad++.<br />
- Sử dụng chức năng Import Data / From Text trong Excel.<br />
- Kiểm tra lại dấu phân cách dữ liệu.<br />
</span></span><br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.3 CSV của người khác có nhiều cột hơn hoặc ít cột hơn</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều người cho rằng CSV là định dạng cố định. Thực tế không phải vậy. Một file CSV có thể chỉ chứa:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point ID ( Số hiệu điểm)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting ( Tọa đọ X)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing ( Tọa độ Y)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation ( Cao độ)</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài các trường dữ liệu cơ bản như <strong>Số hiệu điểm, Tọa độ X, Tọa độ Y và Cao độ H</strong>, nhiều phần mềm RTK còn cho phép xuất thêm các thông tin như:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mã điểm (Code)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao sào (Rod Height)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao ăng-ten (Antenna Height)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số PDOP</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm (Fix Status)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc phương vị (Azimuth)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô tả hoặc ghi chú điểm (Description)</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân là do cấu hình định dạng xuất dữ liệu của từng phần mềm hoặc từng đơn vị sử dụng. Đây không phải lỗi dữ liệu.<br />
</span></span><br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.4 Nhập dữ iệu thành công nhưng điểm nằm sai vị trí</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi nguy hiểm nhất vì rất khó phát hiện nếu không kiểm tra lại.<br />
<br />
Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhầm thứ tự cột X và Y.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục VN-2000.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai đơn vị tọa độ.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ:</strong></u><br />
Đúng: Point,X,Y,H<br />
P1,234567.123,1234567.456,10.123<br />
<br />
Sai: Point,Y,X,H<br />
P1,1234567.456,234567.123,10.123</em><br />
<br />
Kết quả là điểm có thể xuất hiện cách vị trí thực hàng chục hoặc hàng trăm kilomet.<br />
<br />
<strong>Cách xử lý:</strong><br />
- Kiểm tra lại cấu trúc file.<br />
- Kiểm tra đúng thứ tự Easting và Northing.<br />
- Kiểm tra hệ tọa độ công trình.<br />
- Đối chiếu với một điểm khống chế đã biết.<br />
</span></span><br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.5 Nhập dữ liệu thành công nhưng không nhìn thấy điểm</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lúc này máy báo nhập dữ liệu thành công, danh sách điểm vẫn có nhưng không nhìn thấy điểm trên bản đồ.<br />
<br />
Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nằm ngoài phạm vi hiển thị.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai Projection.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br />
- Zoom Extents.<br />
- Kiểm tra lại hệ tọa độ.<br />
- Kiểm tra lại Projection và KTT.<br />
</span></span><br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.6 Nhập dữ liệu định dạng DXF nhưng không hiển thị đối tượng</span></span></h3>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lỗi này xảy ra do những nguyên nhân như:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer đang tắt.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF không tương thích.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng nằm ngoài vùng hiển thị.</span></span></li>
</ul>
<br />
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cách xử lý:</span></span></strong><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Layer.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thử lưu lại DXF phiên bản thấp hơn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Zoom Extents để kiểm tra toàn bộ bản vẽ.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
>>> CSV, TXT, DAT, DXF, KML hay SHP đều là những định dạng dữ liệu quan trọng trong công tác đo đạc hiện đại. Không có định dạng nào là "tốt nhất" cho mọi trường hợp. Lựa chọn đúng định dạng xuất dữ liệu sẽ giúp:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thời gian xử lý văn phòng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế lỗi chuyển đổi dữ liệu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả phối hợp giữa khảo sát, thiết kế và thi công.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm rủi ro mất dữ liệu hoặc bàn giao sai định dạng.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế hiện nay, CSV vẫn là định dạng phổ biến nhất nhờ tính linh hoạt, dễ sử dụng và khả năng tương thích với hầu hết các phần mềm đo đạc, CAD và GIS.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/588632958_1241954074621445_1455996422080404648_n.jpg" style="width: 747px; height: 420px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>',
'images' => '2026060609425746cdab6ee8d08331f2369b4b04a4a4d5.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Định dạng file RTK: CSV, DAT, DXF, KML, SHP và Cách Xuất, Nhập Dữ Liệu',
'meta_key' => '',
'meta_des' => 'Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.',
'created' => '2026-06-06',
'modified' => '2026-07-12',
'status' => '1',
'view' => '877',
'slug' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '545',
'rght' => '546',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 7 => array(
'Post' => array(
'id' => '816',
'name' => 'Sửa chữa máy thủy bình bị rơi, va đập – Nguyên nhân gây đo sai ngoài công trường',
'code' => null,
'alias' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-–-nguyen-nhan-gay-do-sai-ngoai-cong-truong',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br />
Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br />
<br />
Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy. Đây được xem như “trái tim” của máy thủy bình tự động.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850337449414_cbf23e5b4edf679eed8636152be1bb10.jpg" style="width: 600px; height: 800px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cụm cân bằng tự động hoạt động theo nguyên lý trọng lực với hệ thống con lắc treo bằng dây cực nhỏ kết hợp cơ cấu giảm dao động từ tính để giữ tia ngắm luôn nằm ngang. Nhờ đó máy có thể tự cân bằng nhanh và cho độ chính xác cao ngoài công trường. Tuy nhiên, cấu tạo này cũng khá nhạy với va đập. Chỉ một cú rơi hoặc vận chuyển mạnh cũng có thể gây các lỗi như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Liệt rung cụm compensator.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhảy rung hoặc kẹt rung.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xoắn hoặc lệch dây treo con lắc.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i lớn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả khác nhau.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số cao độ tăng bất thường.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế sửa chữa, phần lớn các trường hợp máy thủy bình đo sai sau va đập đều liên quan trực tiếp đến cụm cân bằng tự động.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850429563246_858468dda57655643001cdc5b7476042.jpg" style="width: 600px; height: 800px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Một số dấu hiệu nhận biết máy thủy bình bị sai sau va đập</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi máy thủy bình bị rơi, va đập hoặc vận chuyển mạnh, nếu xuất hiện các dấu hiệu dưới đây thì nên kiểm tra ngay cụm cân bằng tự động bên trong máy:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả chênh lệch bất thường.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng một vị trí nhưng đo nhiều lần ra số khác nhau.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số rất lớn, thậm chí lệch đến hàng mét.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy vẫn đọc mia bình thường nhưng cao độ không ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi lắc nhẹ máy không còn nghe tiếng rung “roong roong” êm như lúc mới mua.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, cụm con lắc bên trong đã bị:<br />
<br />
• Liệt rung<br />
• Kẹt rung<br />
• Xoắn dây treo<br />
• Hoặc mất khả năng cân bằng tự động<br />
<br />
Điều nguy hiểm là bên ngoài máy vẫn có thể hoạt động “có vẻ bình thường”, khiến người dùng khó phát hiện nếu không kiểm tra sai số trước khi thi công. Vì vậy, sau mỗi lần máy bị va đập, nên kiểm tra sai số góc i hoặc test đo đi – đo về trước khi tiếp tục sử dụng ngoài công trường.<br />
<br />
Khuyến nghị sau khi thiết bị bị va đập:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy và ốc cân bằng bằng cách quay máy 180° để quan sát độ dịch chuyển bọt thủy.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai số góc i bằng phương pháp hai mia hoặc thử nghiệm đối chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không tiếp tục đo công trình khi chưa xác định chính xác tình trạng thiết bị.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì chỉ một máy bị lệch cũng có thể truyền sai số cho toàn bộ số liệu ngoài công trường.</span></span><br />
<br />
<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (6).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 420px;" /></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Qui trình sửa chữa máy thủy bình tại Trắc địa Thành Đạt</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bước 1: Tiếp nhận và kiểm tra tổng thể thiết bị.<br />
Bước 2: Kiểm tra cụm treo con lắc và cụm cân bằng tự động.<br />
Bước 3: Báo lỗi, báo giá sửa chữa và hiệu chỉnh.<br />
Bước 4: Cân chỉnh cụm compensator — công đoạn quan trọng nhất.<br />
Bước 5: Hiệu chỉnh sai số góc i.<br />
Bước 6: Kiểm tra thực địa sau sửa chữa.<br />
Bước 7: Dán tem kiểm nghiệm trước khi bàn giao cho khách hàng.<br />
<br />
Một máy thủy bình bị lệch không chỉ làm sai một điểm đo… mà có thể truyền sai số cho toàn bộ tuyến hoặc số liệu ngoài công trường.</span></span><br />
<br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Q&A - Kiểm tra máy thủy bình/ thủy chuẩn sau khi bị rơi, va đập</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy thủy bình bị rơi/ va đập có cần kiểm tra lại không?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Đây là bước rất quan trọng trước khi tiếp tục thi công vì chỉ một sai lệch nhỏ trên máy thủy bình cũng có thể ảnh hưởng đến toàn bộ số liệu cao độ ngoài công trường. Nhiều trường hợp máy vẫn đọc mia bình thường nhưng thực tế tia ngắm đã bị sai lệch sau va đập.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi bị rơi máy thủy bình thường gặp những lỗi gì?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số lỗi phổ biến gồm:<br />
• Lệch bọt thủy.<br />
• Sai số góc i lớn.<br />
• Liệt rung hoặc nhảy rung cụm cân bằng tự động.<br />
• Nhìn mia hoặc mục tiêu không rõ.<br />
• Hư ốc cân bằng, vi động hoặc đế máy.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình bị lệch bọt thủy?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường do vận chuyển không đúng cách hoặc máy bị tác động mạnh khiến hệ thống cân bằng thay đổi vị trí, dẫn đến máy khó cân bằng hoặc cân bằng nhưng số đo không ổn định.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sai số góc i trên máy thủy bình là gì?</em></span></span></h3>
<p class="isSelectedEnd">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i là tình trạng tia ngắm không còn nằm ngang chuẩn. Khi đó đo đi – đo về có thể cho kết quả khác nhau và sai số cao độ tăng bất thường. Đây là lỗi rất phổ biến sau khi máy thủy bình bị va đập.</span></span></p>
<h3 style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/Sai số góc i.png" style="width: 665px; height: 295px;" /></h3>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>“Liệt rung” hoặc “nhảy rung” là gì?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi liên quan đến cụm cân bằng tự động (Automatic Compensator) bên trong máy thủy bình. Cụm con lắc bên trong có thể bị: đứt dây treo, xoắn dây, kẹt rung hoặc lệch cơ cấu giảm dao động từ tính. <br />
Khi đó máy không còn tự cân bằng chính xác dù vẫn có thể đọc mia bình thường.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850459087569_e24952711404d15f27d74612fb6b68f7.jpg" style="width: 460px; height: 219px;" /></span></span></p>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Dây rung máy thủy bình</em></span></span></p>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình nhìn mia không rõ sau va chạm?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân có thể do:<br />
<br />
• Kính bị bẩn hoặc trầy xước.<br />
• Hệ thống lấy nét bị ảnh hưởng.<br />
• Cụm quang học bị lệch sau va đập.<br />
<br />
Nếu không kiểm tra sớm có thể ảnh hưởng trực tiếp đến độ chính xác đo đạc.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy bị hư ốc cân bằng hoặc đế máy có nghiêm trọng không?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Nếu máy bị rơi mạnh, các bộ phận cơ khí như: vi động, ốc cân bằng, đế máy… có thể bị cong, nứt hoặc biến dạng khiến việc cân bằng và đo đạc không còn chính xác như ban đầu.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi máy thủy bình bị rơi nên làm gì?</em></span></span></h3>
<p class="isSelectedEnd">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy, kiểm tra sai số góc i và cụm con lắc tự động trước khi tiếp tục đo công trình. </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm để tránh truyền sai số cho toàn bộ số liệu thi công. </span></p>
<br />
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<strong style="margin: 0px; padding: 0px; font-weight: bold;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><a href="https://zalo.me/0913051734">Trắc Địa Thành Đạt</a> – Cung cấp máy thủy bình chính hãng!</span></span></strong></p>
<br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Hotline: <strong style="margin: 0px; padding: 0px; font-weight: bold;">0913 051 734 / 0942 288 388</strong></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Địa chỉ: 145 Láng Hạ – Đống Đa – Hà Nội<br style="margin: 0px; padding: 0px;" />
Fanpage: Trắc Địa Thành Đạt</span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>',
'images' => '20260521180410f10bb16a2b4a9dbcb155bfe047377890.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Sửa Chữa Máy Thủy Bình Bị Rơi, Va Đập – Nguyên Nhân Gây Đo Sai & Cách Khắc Phục!',
'meta_key' => '',
'meta_des' => 'Máy thủy bình bị rơi, va đập dễ gây liệt rung, nhảy rung, sai số góc i và đo cao độ sai. Tìm hiểu nguyên nhân, dấu hiệu nhận biết và quy trình sửa chữa – hiệu chỉnh máy thủy bình tại Trắc Địa Thành Đạt.',
'created' => '2026-05-21',
'modified' => '2026-07-12',
'status' => '1',
'view' => '910',
'slug' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-nguyen-nhan-gay-do-sai-ngoai-cong-truong',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '543',
'rght' => '544',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 8 => array(
'Post' => array(
'id' => '815',
'name' => 'Đo hầm bằng máy toàn đạc: So sánh Tunnel App Leica và giải pháp của các hãng khác',
'code' => null,
'alias' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi nói đến đo hầm bằng máy toàn đạc, thách thức lớn nhất không nằm ở thao tác đo… mà ở việc kiểm soát sai số và tiến độ thi công ngay tại hiện trường.</span></span>',
'content' => '<p>
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong các công trình hầm, metro hoặc hạ tầng ngầm, đo hầm bằng máy toàn đạc là phương pháp gần như bắt buộc do không thể sử dụng GNSS. </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tuy nhiên, thách thức lớn nhất không nằm ở việc đo được điểm, mà là kiểm soát sai số và phát hiện sai lệch kịp thời ngay tại hiện trường. Nếu sai số chỉ được phát hiện sau khi xử lý dữ liệu tại văn phòng, việc hiệu chỉnh sẽ trở nên tốn kém và ảnh hưởng trực tiếp đến tiến độ thi công. </span><br />
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chính vì vậy, các hãng thiết bị trắc địa đã phát triển nhiều giải pháp khác nhau nhằm hỗ trợ kỹ sư kiểm soát tốt hơn trong quá trình đo hầm.</span></p>
<p>
</p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Tunnel App trên máy toàn đạc Leica FlexLine</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 Tunnel App là gì?</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tunnel App là module phần mềm tích hợp trong hệ điều hành FlexField trên các dòng máy toàn đạc Leica FlexLine như TS03 và TS07.<br />
<br />
Ứng dụng này cho phép người dùng:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nạp dữ liệu thiết kế tuyến và biên dạng hầm</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực hiện stakeout trực tiếp ngoài hiện trường</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo profile và kiểm tra đào – đắp (cut & fill)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh sai lệch với thiết kế ngay trên máy</span></span></li>
</ul>
<h3>
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.2 Ưu điểm của Tunnel App</span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với phương pháp đo truyền thống, Tunnel App mang lại một số lợi ích rõ rệt:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thao tác trung gian giữa hiện trường và văn phòng</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hiển thị sai lệch trực quan theo biên dạng hầm</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ phát hiện sai số ngay trong quá trình đo</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng tốc độ thi công và kiểm tra</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nổi bật của Leica là khả năng tích hợp toàn bộ workflow ngay trên thiết bị, phù hợp với các công trình cần triển khai nhanh ngoài hiện trường.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Quy trình đo hầm ngoài công trường</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị của Leica, Trimble, Topcon hay các hãng khác, quy trình đo hầm bằng máy toàn đạc ngoài công trường về bản chất vẫn tuân theo một nguyên tắc chung: t<strong>hiết lập đúng – bố trí đúng – kiểm tra liên tục.</strong><br />
<br />
Bước đầu tiên và quan trọng nhất là <strong>thiết lập trạm máy</strong>. Kỹ sư trắc địa cần đặt máy tại vị trí khống chế đã biết tọa độ và định hướng bằng phương pháp <strong>backsight hoặc resection</strong>. Độ chính xác của bước này có ảnh hưởng trực tiếp đến toàn bộ tuyến hầm, bởi chỉ cần sai lệch nhỏ ở định hướng ban đầu cũng có thể dẫn đến sai số tích lũy theo chiều dài công trình.<br />
<br />
Sau khi trạm máy được thiết lập chính xác, dữ liệu thiết kế sẽ được nạp vào hệ thống. Các thông tin bao gồm tim tuyến (alignment), lý trình và biên dạng hầm (cross-section) đóng vai trò làm cơ sở để thực hiện stakeout ngoài thực địa. Ở giai đoạn này, việc kiểm tra lại hệ tọa độ, đơn vị và hướng tuyến là cần thiết nhằm tránh các sai sót do nhập liệu hoặc chuyển đổi dữ liệu.<br />
<br />
Trong quá trình thi công, các điểm đặc trưng của biên dạng hầm sẽ được bố trí trực tiếp ngoài hiện trường thông qua máy toàn đạc. Người đo sẽ lần lượt xác định vị trí các điểm theo thiết kế và hướng dẫn thi công đào hầm theo đúng hình học yêu cầu. Tuy nhiên, việc “bố trí đúng” chưa phải là bước cuối cùng.<br />
<br />
Khâu kiểm tra mới là yếu tố quyết định chất lượng. Các điểm sau khi bố trí cần được đo lại và so sánh với thiết kế bằng các phép đo lặp hoặc thông qua các công cụ kiểm tra trên máy. Việc này giúp phát hiện sớm các sai lệch về vị trí, cao độ hoặc hình dạng biên dạng hầm, từ đó kịp thời điều chỉnh trước khi sai số bị tích lũy.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/LGS_streamline_tunnel_construction_and_maintenance_2480x750.jpg" style="width: 800px; height: 242px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế, nhiều sai số lớn trong thi công hầm không đến từ thiết bị, mà đến từ việc không kiểm tra hoặc kiểm tra quá muộn. Vì vậy, một quy trình đo hầm hiệu quả luôn phải đảm bảo nguyên tắc: đo đến đâu, kiểm tra đến đó.<br />
<br />
Sự khác biệt giữa các hãng thiết bị hiện nay chủ yếu nằm ở mức độ hỗ trợ người dùng trong từng bước của quy trình này. Tuy nhiên, dù sử dụng công nghệ nào, cốt lõi của đo hầm bằng máy toàn đạc vẫn không thay đổi: <strong>Thiết lập chuẩn – dữ liệu đúng – kiểm tra liên tục.</strong></span></span> <br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. So sánh các giải pháp đo hầm của các hãng</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Leica – All-in-one tại hiện trường</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica là hãng đi theo hướng tích hợp toàn bộ quy trình đo hầm vào một ứng dụng duy nhất. Tunnel App giúp người dùng thực hiện liên tục các bước từ nạp dữ liệu, bố trí đến kiểm tra ngay tại hiện trường mà không cần phụ thuộc nhiều vào xử lý hậu kỳ.<br />
Phù hợp với:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình thi công nhanh</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đội thi công cần thao tác đơn giản, trực quan.</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica App Tunnel 3.jpg" style="width: 800px; height: 428px;" /></span></span></p>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Trimble – Hệ sinh thái và xử lý thiết kế</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trimble sử dụng phần mềm Trimble Access kết hợp với module Tunnels chuyên dụng. Giải pháp này tập trung vào khả năng:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý alignment phức tạp</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối với phần mềm thiết kế như TBC</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý dữ liệu trong các dự án lớn</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự án metro, hầm quy mô lớn</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu đồng bộ BIM</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Trimple tunnel.jpg" style="width: 800px; height: 446px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Topcon – Linh hoạt theo workflow</span></span></h3>
<p style="text-align: center;">
</p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không giống Leica, <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu-topcon-gm-50-series.html">Topcon</a> không phát triển một module “Tunnel App” riêng biệt cho dòng máy toàn đạc. Thay vào đó, hãng lựa chọn hướng tiếp cận linh hoạt hơn thông qua phần mềm <strong>MAGNET Field</strong>. Trong thực tế, công tác đo hầm bằng máy toàn đạc Topcon được thực hiện bằng cách kết hợp nhiều chức năng sẵn có như alignment, stakeout, offset và kiểm tra profile.<br />
<br />
<strong>Workflow điển hình trên Topcon</strong><br />
<br />
Người dùng sẽ bắt đầu bằng việc nạp dữ liệu tuyến (alignment) và các thông số thiết kế vào phần mềm. Sau khi thiết lập trạm máy, quá trình stakeout được thực hiện thông qua các điểm tuyến và các khoảng lệch (offset) theo biên dạng hầm. <br />
Đối với kiểm tra hình học, kỹ sư thường đo lại các điểm trên biên dạng thực tế và so sánh với thiết kế thông qua các công cụ kiểm tra trong phần mềm hoặc xử lý hậu kỳ.<br />
<br />
<strong>Ưu điểm của cách tiếp cận này</strong><br />
<br />
Điểm mạnh lớn nhất của Topcon là tính linh hoạt. Người dùng có thể tùy biến quy trình đo theo từng loại công trình mà không bị giới hạn bởi một module cố định. Điều này đặc biệt hữu ích trong các dự án có yêu cầu đặc thù hoặc khi dữ liệu thiết kế không theo một chuẩn cố định.<br />
<br />
<strong>Hạn chế cần lưu ý</strong><br />
<br />
Tuy nhiên, việc không có một module tunnel chuyên dụng cũng đồng nghĩa với việc:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy trình đo phụ thuộc nhiều vào kinh nghiệm người sử dụng,</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc kiểm tra sai số không trực quan bằng các hệ thống tích hợp,</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần hiểu rõ workflow để tránh sai sót trong quá trình triển khai.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nói cách khác, Topcon không làm “ít hơn”, nhưng yêu cầu người dùng phải “hiểu nhiều hơn”.</span></span><br />
<br />
<h3 style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel.jpg" style="text-align: center; font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 800px; height: 533px;" /></h3>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.4 Nikon / Sokkia – Phương pháp truyền thống</span></span></h3>
<p style="text-align: center;">
</p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các dòng máy của Nikon và Sokkia chủ yếu sử dụng phương pháp truyền thống:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout cơ bản</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo và kiểm tra thủ công</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giải pháp này vẫn đáp ứng tốt các công trình quy mô nhỏ, nhưng hạn chế khi cần xử lý các dự án phức tạp.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Sự khác biệt cốt lõi trong đo hầm và yếu tố ảnh hưởng tới độ chính xác</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm khác biệt quan trọng nhất giữa các giải pháp không nằm ở khả năng đo, mà nằm ở thời điểm phát hiện sai số.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp truyền thống: phát hiện sai sau khi đo</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm tích hợp (Tunnel App, Tunnels Module): phát hiện sai ngay trong quá trình đo</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc phát hiện sai số sớm giúp giảm chi phí hiệu chỉnh và hạn chế rủi ro trong thi công.<br />
</span></span>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Những yếu tố ảnh hưởng đến độ chính xác</strong></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị hay phần mềm nào, độ chính xác trong đo hầm vẫn phụ thuộc vào:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định hướng trạm máy (backsight)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện môi trường ảnh hưởng đến đo EDM</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số truyền tọa độ</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kỹ năng và thao tác của người sử dụng</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các phần mềm hiện đại chỉ đóng vai trò hỗ trợ, không thể thay thế hoàn toàn quy trình kiểm soát kỹ thuật ngoài công trường.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel 2.jpg" style="width: 800px; height: 415px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Đo hầm bằng máy toàn đạc đã có sự chuyển dịch rõ rệt từ phương pháp thủ công sang các giải pháp tích hợp và trực quan hơn. Tunnel App của Leica là một ví dụ điển hình cho xu hướng đưa việc kiểm soát sai số xuống ngay tại hiện trường. Trong khi đó, các hãng khác như Trimble, Topcon hay Nikon lựa chọn những hướng tiếp cận khác nhau, phù hợp với từng loại công trình và nhu cầu sử dụng.<br />
Tuy nhiên, yếu tố quan trọng nhất vẫn là: Hiểu đúng quy trình đo và chủ động kiểm soát sai số trong suốt quá trình thi công<br />
<br />
Nếu bạn cần tư vấn lựa chọn máy toàn đạc hoặc giải pháp đo hầm phù hợp với công trình, liên hệ ngay với chúng tôi!<br />
<br />
<span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt – Luôn đồng hành cùng bạn!</strong></span><br />
</span></span>',
'images' => '202604231558382137741e17c2868ead929b32a270f9f6.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Đo hầm bằng máy toàn đạc: Leica Tunnel App và các hãng khác',
'meta_key' => '',
'meta_des' => 'Tìm hiểu cách đo hầm bằng máy toàn đạc Leica với Tunnel App và so sánh với Trimble, Topcon, Nikon. Quy trình, ưu nhược điểm và cách kiểm soát sai số ngoài công trường.',
'created' => '2026-04-23',
'modified' => '2026-07-12',
'status' => '1',
'view' => '1482',
'slug' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '541',
'rght' => '542',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 9 => array(
'Post' => array(
'id' => '814',
'name' => 'Máy toàn đạc điện tử: ĐO CHUẨN – BỐ TRÍ NHANH – ỔN ĐỊNH NGOÀI CÔNG TRƯỜNG!',
'code' => null,
'alias' => 'may-toan-dac-dien-tu-do-chuan-–-bo-tri-nhanh-–-on-dinh-ngoai-cong-truong',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br />
Tại <strong>Trắc Địa Thành Đạt</strong>, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br />
<br />
Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Vì sao máy toàn đạc vẫn là thiết bị không thể thay thế?</span></span></h2>
<br />
<p data-end="216" data-start="105">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong điều kiện thi công thực tế tại Việt Nam, nhiều khu vực thường gặp hạn chế về khả năng đo GNSS, chẳng hạn:</span></span></p>
<ul data-end="407" data-start="218">
<li data-end="296" data-section-id="3ju1r3" data-start="218">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không gian bị che khuất bởi nhà cao tầng, công trình dày đặc hoặc tầng hầm</span></span></li>
<li data-end="337" data-section-id="k3xm0j" data-start="297">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu vệ tinh yếu hoặc nhiễu mạnh</span></span></li>
<li data-end="407" data-section-id="utqol9" data-start="338">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Yêu cầu độ chính xác cao đến milimet trong quan trắc và hoàn công.</span></span></li>
</ul>
<p data-end="491" data-start="409">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong những trường hợp này, máy toàn đạc vẫn là giải pháp hiệu quả và ổn định nhờ:</span></span></p>
<ul data-end="665" data-start="493">
<li data-end="553" data-section-id="1rjirb8" data-start="493">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng đo khoảng cách chính xác cao bằng công nghệ EDM</span></span></li>
<li data-end="594" data-section-id="1tziawf" data-start="554">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phụ thuộc vào tín hiệu vệ tinh</span></span></li>
<li data-end="665" data-section-id="rakyqa" data-start="595">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm soát chặt chẽ công tác bố trí điểm và thi công ngoài thực địa.</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hai chức năng cốt lõi của máy toàn đạc</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 Đo điểm (Measurement)</span></span></h3>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là chức năng cơ bản và quan trọng nhất của máy toàn đạc trong công tác khảo sát. Máy thực hiện đo các yếu tố hình học gồm:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc ngang (Horizontal Angle)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc đứng (Vertical Angle)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách (EDM – Electronic Distance Measurement)</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ các giá trị này, hệ thống sẽ tính toán và xác định tọa độ không gian của điểm đo dưới dạng (X, Y, Z).<br />
<br />
Ngoài ra, máy toàn đạc hiện đại còn hỗ trợ:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo không gương (Non-prism) trong điều kiện khó tiếp cận</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu trữ và quản lý dữ liệu điểm đo trực tiếp trên máy</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xuất dữ liệu phục vụ xử lý nội nghiệp (CAD, TBC, Civil 3D…)</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát địa hình, đo vẽ bản đồ</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo hiện trạng công trình, kiểm tra kích thước</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lập lưới khống chế và thu thập dữ liệu phục vụ thiết kế</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica-Nova-TS60-BC-facing-right.jpg" style="width: 750px; height: 258px;" /></span></span><span style="display: none;"> </span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 Bố trí điểm (Stakeout)</span></span></h3>
<p data-end="1067" data-start="941">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí điểm là quá trình chuyển thông tin từ bản vẽ thiết kế ra vị trí ngoài thực địa, đóng vai trò quan trọng trong thi công.</span></span></p>
<p data-end="1114" data-start="1069">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựa trên tọa độ thiết kế, hệ thống thực hiện:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh tọa độ thiết kế với vị trí thực tế của gương (prism)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán sai lệch theo các phương</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn người đo di chuyển theo các chỉ dẫn:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trái / phải</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tiến / lùi</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lên / xuống</span></span></li>
</ul>
</li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhờ đó, điểm ngoài thực địa được đưa về đúng vị trí thiết kế với độ chính xác cao.<br />
<br />
Ngoài ra, các dòng máy hiện nay còn hỗ trợ:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí tuyến, cung tròn (Road / Arc stakeout)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí theo lưới, theo tim trục</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai lệch sau thi công (As-built check)</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định vị tim trục công trình</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí móng, cột, dầm, sàn</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thi công hạ tầng, giao thông, công trình kỹ thuật</span></span></li>
</ul>
<h2 style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/image (11).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 660px; height: 371px;" /></h2>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Những lỗi đo cạnh thường gặp và cách xử lý</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Nguyên lý đo cạnh của máy toàn đạc</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc xác định khoảng cách bằng cách:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát tín hiệu laser hoặc hồng ngoại đến gương (prism)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận tín hiệu phản xạ quay về</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán khoảng cách dựa trên thời gian truyền (Time of Flight) hoặc độ lệch pha (Phase Measurement).</span></span></li>
</ul>
</li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các hãng như Leica, Topcon, Nikon hay Trimble đều sử dụng nguyên lý này, chỉ khác nhau về công nghệ xử lý tín hiệu và thuật toán nội bộ.</span></span>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Các nguyên nhân gây lỗi đo cạnh</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.1 Suy giảm hệ đo EDM<br />
<br />
Đây là nguyên nhân phổ biến nhất trong thực tế. Biểu hiện:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo lặp lại cho kết quả khác nhau</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách “nhảy số”, không ổn định</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Linh kiện EDM xuống cấp theo thời gian</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát yếu hoặc bộ thu tín hiệu kém</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Làm việc trong điều kiện ánh sáng mạnh hoặc phản xạ kém</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo tài liệu của Leica Geosystems, độ chính xác đo cạnh phụ thuộc lớn vào cường độ tín hiệu phản xạ và điều kiện môi trường.<br />
<br />
3.2.2 Lệch trục EDM – trục ngắm (Collimation error)<br />
<br />
Biểu hiện:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo gần tương đối đúng</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo xa sai lệch tăng dần</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bị va đập, rung lắc trong quá trình sử dụng</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lâu không hiệu chuẩn</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai lệch cơ khí tích lũy</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số này ảnh hưởng rõ rệt khi đo khoảng cách lớn, đặc biệt trong các công trình yêu cầu độ chính xác cao.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lỗi đo cạnh ( trục) 2.png" style="width: 680px; height: 295px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.3 Sai hằng số gương (Prism constant)<br />
<br />
Biểu hiện:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số gần như cố định trên mọi khoảng cách</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng sai loại gương</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai giá trị hằng số gương (0, -30, +17.5 mm…)</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Trimble, việc thiết lập đúng prism constant là điều kiện bắt buộc để đảm bảo độ chính xác đo cạnh.<br />
<br />
3.2.4 Ảnh hưởng môi trường đo<br />
<br />
Các yếu tố môi trường có thể ảnh hưởng đáng kể đến kết quả đo:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiệt độ và áp suất (P/T)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiễu khí quyển</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bề mặt phản xạ kém (tường sơn tối, bề mặt ướt, kim loại)</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo khuyến nghị của FIG, sai số EDM tăng lên đáng kể trong điều kiện khí quyển không ổn định.<br />
<br />
3.2.5 Sai số do thao tác người dùng<br />
<br />
Đây là nhóm lỗi rất phổ biến ngoài công trường.Bao gồm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựng sào không thẳng</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai chiều cao gương</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập sai trạm máy hoặc điểm định hướng</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình hệ tọa độ không phù hợp</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số do người dùng thường khó nhận biết nếu không có quy trình kiểm tra chéo.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Cách khắc phục</span></span></h3>
<br />
<ul>
<li data-end="2098" data-section-id="zvrhg8" data-start="2066">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra EDM, 2C, MO định kỳ</span></span></li>
<li data-end="2130" data-section-id="uu2tiv" data-start="2099">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng đúng prism constant</span></span></li>
<li data-end="2172" data-section-id="nwvnt0" data-start="2131">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm tra cạnh chuẩn trước thi công</span></span></li>
<li data-end="2209" data-section-id="ux2ibp" data-start="2173">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh đo trong điều kiện bất lợi</span></span></li>
</ul>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Các dòng máy toàn đạc phổ biến</span></span></h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Leica</strong><br />
<br />
Leica là thương hiệu cao cấp trong lĩnh vực trắc địa, nổi bật với độ chính xác và độ ổn định lâu dài. Hệ EDM mạnh, khả năng làm việc tốt trong nhiều điều kiện môi trường khác nhau, đặc biệt phù hợp với các công trình yêu cầu kỹ thuật cao.<br />
<br />
Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao, ổn định theo thời gian</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ EDM mạnh, ít bị ảnh hưởng bởi môi trường</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm và thuật toán xử lý tốt</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình cao tầng, cầu đường, quan trắc, dự án yêu cầu kiểm soát sai số chặt chẽ.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Leica toàn đạc.jpg" style="width: 680px; height: 907px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Topcon</strong><br />
<br />
Topcon là dòng máy phổ biến nhờ sự cân bằng giữa hiệu năng và chi phí. Thiết bị dễ sử dụng, độ bền tốt, đáp ứng đa dạng nhu cầu thi công ngoài công trường.<br />
<br />
Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, thao tác nhanh</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ ổn định tốt trong điều kiện công trường</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chi phí hợp lý</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, hạ tầng, thi công phổ thông.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z6599539340575_12c3eac505cba39e86905990604ee094.jpg" style="width: 680px; height: 907px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nikon</strong><br />
<br />
Nikon là lựa chọn phù hợp cho các đơn vị cần thiết bị đo đạc cơ bản với chi phí đầu tư thấp. Thiết kế đơn giản, dễ tiếp cận và đáp ứng tốt các công việc đo đạc thông thường.<br />
<br />
Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giá tốt, dễ tiếp cận</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, phù hợp người mới</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền ổn định</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, khảo sát cơ bản.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/DTM 352 Nikon 2.jpg" style="width: 680px; height: 509px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Sokkia</strong><br />
<br />
Sokkia có cùng hệ sinh thái với Topcon, nổi bật về độ bền và khả năng làm việc ổn định trong điều kiện công trường khắc nghiệt. Thiết bị được đánh giá cao về tính “lành”, ít lỗi vặt.<br />
<br />
Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền cao, ổn định lâu dài</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động tốt trong môi trường khắc nghiệt</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác đáp ứng tốt thi công</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình hạ tầng, công trường làm việc cường độ cao.<br />
<br />
<strong>Trimble</strong><br />
<br />
Trimble tập trung mạnh vào giải pháp tích hợp và hệ sinh thái phần mềm. Các dòng máy toàn đạc của Trimble nổi bật ở khả năng kết nối, xử lý dữ liệu và làm việc đồng bộ với GNSS.<br />
<br />
Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ sinh thái phần mềm mạnh (Access, TBC…)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tích hợp GNSS và quản lý dữ liệu tốt</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp quy trình làm việc hiện đại</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Dự án lớn, doanh nghiệp cần đồng bộ dữ liệu và quản lý thi công<br />
<br />
> Mỗi thương hiệu đều có định hướng và thế mạnh riêng. Việc lựa chọn nên dựa trên nhu cầu thực tế, điều kiện công trường và yêu cầu kỹ thuật của từng dự án để đạt hiệu quả tối ưu.</span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cách chọn máy toàn đạc phù hợp công trình</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc lựa chọn máy toàn đạc cần dựa vào yêu cầu kỹ thuật và điều kiện thi công thực tế, thay vì chỉ nhìn vào thương hiệu hoặc giá thành.</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình dân dụng, hạ tầng cơ bản</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với các dòng Nikon hoặc Topcon nhờ dễ sử dụng, độ ổn định tốt và chi phí hợp lý. Đáp ứng hiệu quả cho các công việc đo đạc, bố trí thông thường.<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu độ chính xác cao</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên ưu tiên Leica hoặc các dòng cao cấp, với độ chính xác và độ ổn định cao, phù hợp cho nhà cao tầng, kết cấu thép hoặc các hạng mục cần kiểm soát sai số chặt chẽ.<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quan trắc, kiểm soát biến dạng</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lựa chọn máy có độ chính xác cao và hệ EDM ổn định, đảm bảo khả năng lặp lại kết quả trong nhiều chu kỳ đo.<br />
<br />
Nguyên tắc quan trọng: Lựa chọn đúng thiết bị theo nhu cầu thực tế sẽ giúp:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm sai số trong đo đạc</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tối ưu chi phí đầu tư</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nâng cao hiệu quả thi công</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo chất lượng công trình</span></span></li>
</ul>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Tại sao nên mua máy toàn đạc tại Trắc địa Thành Đạt?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi cung cấp đa dạng các loại máy toàn đạc của các hãng <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu">Leica</a>, Nikon, Topcon, đáp ứng nhiều nhu cầu khác nhau trong thi công và khảo sát.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tư vấn đúng nhu cầu công trình</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ kỹ thuật ngoài công trường</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn sử dụng, kiểm tra sai số</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cung cấp thiết bị chính hãng.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
Bạn đang phân vân giữa các dòng máy toàn đạc? Hoặc gặp lỗi đo cạnh ngoài công trường?<br />
<br />
>>> Liên hệ ngay <a href="https://zalo.me/0913051734"><strong>Trắc Địa Thành Đạt</strong></a> để được tư vấn phù hợp nhất! </span></span>',
'images' => '20260505102744e930c0e340a0ba993987b0238086413c.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy toàn đạc điện tử: Báo giá, tư vấn chọn máy chuẩn công trình!',
'meta_key' => '',
'meta_des' => 'Tìm hiểu máy toàn đạc điện tử, cách chọn máy phù hợp công trình. Tư vấn thiết bị chính hãng tại Trắc Địa Thành Đạt!',
'created' => '2026-04-20',
'modified' => '2026-07-11',
'status' => '1',
'view' => '6424',
'slug' => 'may-toan-dac-dien-tu-do-chuan-bo-tri-nhanh-on-dinh-ngoai-cong-truong',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '539',
'rght' => '540',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
)
)
$tinlq = array(
(int) 0 => array(
'Post' => array(
'id' => '644',
'name' => 'GNSS RTK',
'code' => null,
'alias' => 'gnss-rtk',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; border: 0px; background-image: initial; background-position: 0px 0px; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; outline: 0px; vertical-align: top; color: rgb(0, 0, 0); font-size: 14px; text-align: justify; font-weight: 700 !important;">GNSS RTK</span><span style="color: rgb(0, 0, 0); font-size: 14px; text-align: justify;"> được biết đến là thiết bị dùng trong công tác trắc địa giúp hỗ trợ quá trình khảo sát địa hình. Với khả năng tự động vẽ và lưu lại các khu vực khảo sát giúp nhanh chóng hoàn thiện các bản vẽ đầy đủ, chính xác với các thông số kỹ thuật cần thiết. Đây là thiết bị hỗ trợ đắc lực cho những người làm công tác trắc địa để có thể hoàn thành công việc nhanh chóng, tiết kiệm thời gian và chi phí với độ chính xác cao.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường hiện nay có rất nhiều dòng máy GNSS RTK với sự đa dạng về kiểu dáng thiết kế, các tính năng cũng như kích thước cho khách hàng lựa chọn. Với mỗi sản phẩm sẽ có những đặc tính cũng như công năng riêng phù hợp với nhu cầu sử dụng của từng đối tượng khách hàng cũng như tính chất công việc. Cùng tìm hiểu ưu và nhược điểm của máy GNSS RTK để có cái nhìn tổng quan về nó trước khi bạn lựa chọn đầu tư cho dự án của mình.</span></span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <strong>Ưu điểm nổi bật của máy GNSS RTK </strong><br />
<br />
Đảm bảo độ chính xác cao nhất trong quá trình làm việc. Đối với công tác trắc địa thì độ chính xác là thông số quan trọng nhất cần hướng tới trong quá trình làm việc do đó các thiết bị hỗ trợ cũng cần tối ưu hóa được yếu tố này. Với việc áp dụng công nghệ RTK cũng như CORS Network các mẫu máy này đảm bảo mang đến các thông số chuẩn nhất để cung cấp dữ liệu cho quá trình vẽ cũng như hình thành các dữ liệu chung.<br />
<br />
Trong việc sử dụng công nghệ GNSS thì CORS là trạm tham chiếu hoạt động liên tục để tạo sự liên kết các thiết bị với đường truyền tín hiệu. Công nghệ này giúp khoảng cách tối đa giữa trạm gốc và máy định vị GNSS được thiết lập khoảng 10 - 15km, giúp tăng khoảng cách cho hoạt động của máy. Điều này giúp giảm nhân công cũng như chi phí trong quá trình làm việc.<br />
<br />
Với thiết kế nhỏ gọn, dễ dàng di chuyển giúp mang đến sự tiện lợi tối đa trong quá trình sử dụng. <br />
<br />
Một ưu điểm phải kế đến của loại máy GNSS RTK đó là việc tích hợp nhiều tính năng thông minh trong cùng thiết bị. Các tính năng điều khiển bằng giọng nói, bảng điều khiển điện tử, việc thay đổi kích thước máy được tích hợp …giúp dễ dàng sử dụng cũng như có thể thực hiện được nhiều chức năng khác nhau cùng lúc.<br />
<br />
Bộ nhớ trong lớn giúp tăng khả năng lưu trữ thông tin cùng với đó là khả năng kết nối với máy tính, điện thoại, bluetooth hay 3G, 4G giúp nâng cao tối đa được các công năng cũng như sự tiện lợi trong quá trình sử dụng.<br />
<br />
Khả năng kết nối với các thiết bị khác tối ưu cùng với hệ thống CORS.<br />
<br />
Với chất liệu cao cấp có khả năng chống va đập cũng như hạn chế tối đa các tác động của các yếu tố bên ngoài giúp mang đến sản phẩm bền đẹp lâu dài theo thời gian sử dụng.<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/phân phối máy định vị vệ tinh 2 tần số rtk (1).png" style="width: 850px; height: 604px;" /><br />
<br />
<strong>Nhược điểm của máy GNSS RTK</strong><br />
<br />
Hiện nay, máy GPS –GNSS RTK chất lượng dù đã được tích hợp đầy đủ các tính năng nhưng để có được độ chính xác tuyệt đối cùng với vi</span>ệc</span> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">thực hiện thêm nhiều công việc khác các bạn cần phải có sự kết nối thêm các thiết bị khác để sử dụng.<br />
<br />
Giới hạn làm việc của máy trong một phạm vi nhất định cũng là một khó khăn trong quá trình sử dụng. Do đó, cần tìm hiểu đầy đủ các thông số của máy trước khi lựa chọn để phù hợp với đặc điểm công việc.<br />
<br />
Giá thành cao cũng là một nhược điểm cần tính đến khi quyết định đầu tư. <br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/Máy RTK.png" style="width: 850px; height: 680px;" /><br />
<br />
</span></span>',
'images' => '2021081816133230412c34d3b16d2ec66a3d1eba4d0d89.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy RTK',
'meta_key' => 'Máy RTK, máy định vị vệ tinh RTK, máy GPS RTK, máy định vị vệ tinh GNSS RTK, máy RTK giá rẻ, máy RTK tốt nhất',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-08-18',
'modified' => '2026-07-12',
'status' => '1',
'view' => '20547',
'slug' => 'gnss-rtk',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '231',
'rght' => '232',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 1 => array(
'Post' => array(
'id' => '641',
'name' => 'Phần mềm LandStar 7 và cách cài đặt trên máy tính',
'code' => null,
'alias' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LandStar 7 là một ứng dụng miễn phí được phát triển bởi www.chcnav.com, thuộc danh mục Bản đồ và dẫn đường. </span></span>',
'content' => '<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="294" src="https://www.youtube.com/embed/04hr6Gy-3RE" title="YouTube video player" width="680"></iframe><br />
<br />
LandStar7 là giải pháp phần mềm khảo sát đã được kiểm chứng thực địa mới nhất dành cho mọi thiết bị Android và bộ điều khiển dữ liệu CHCNAV. Được thiết kế cho các nhiệm vụ khảo sát và lập bản đồ có độ chính xác cao, LandStar7 cung cấp khả năng quản lý quy trình làm việc liền mạch, giao diện người dùng đồ họa dễ học và dễ sử dụng để hoàn thành tất cả các dự án của bạn một cách hiệu quả. Các định dạng nhập và xuất dữ liệu toàn diện, nhiều phương pháp đo lường đảm bảo năng suất tức thì.<br />
<br />
- Hỗ trợ nhiều loại định dạng nhập và xuất khác nhau LandStar7 nhập và xuất DXF, DWG, SHP, KML, KMZ, CSV, DAT, TXT cũng như nội dung dữ liệu được tùy chỉnh đầy đủ từ dự án khảo sát lựa chọn các định dạng CSV, DAT và TXT.<br />
<br />
- Xác định vị trí và trực quan hóa dữ liệu dự án của bạn trong nháy mắt LandStar7 tích hợp bản đồ trực tuyến của Google, OSM, BING và WMS để cung cấp thông tin vị trí có ý nghĩa cho các nhà khảo sát và chuyên gia xây dựng. Các dự án được hiển thị trong địa hình khu vực hoặc hình ảnh vệ tinh trong thời gian thực.<br />
<br />
- Rất linh hoạt và sẵn sàng cho nhiều ứng dụng LandStar7 được thiết kế để cung cấp cho bạn các bộ tính năng đặc biệt, từ khảo sát đất đai, các dự án xây dựng và kỹ thuật, lập bản đồ, thu thập dữ liệu GIS, liên quan đến đường đến khảo sát đường ống.<br />
<br />
Giao diện người dùng có thể tùy chỉnh của nó giúp LandStar7 dễ sử dụng bằng cách tập trung vào các chức năng thiết yếu thường được sử dụng. Quy trình phát triển phần mềm linh hoạt Nhóm phát triển LandStar7 của chúng tôi giữ liên lạc thường xuyên với các nhà khảo sát, các chuyên gia xây dựng và mạng lưới đối tác trên toàn thế giới của chúng tôi để mang lại các chức năng vượt trội mới. Khi sử dụng LandStar7 ngay hôm nay, bạn được đảm bảo tận hưởng các tính năng mới thường xuyên mà không phải trả thêm phí.<br />
<br />
<strong>>>></strong> Trong bài viết bên dưới đây chúng tôi sẽ giới thiệu tới bạn cách cài đặt LandStar 7 trên máy tính (PC Windows & Mac). Phương pháp mà chúng tôi áp dụng là sử dụng Bluestacks, công cụ giả lập hệ điều hành Android hàng đầu hiện nay. Tất cả những gì bạn cần chỉ là một chiếc máy tính chạy Windows hoặc Mac.<br />
<br />
<strong>Bước 1:</strong> Tải xuống và cài đặt Bluestacks<br />
Tải phiên bản mới nhất tại đây <a href="https://www.bluestacks.com/vi/index.html" target="_blank">https://www.bluestacks.com/vi/index.html</a>. Trang web này hỗ trợ tiếng Việt nên bạn có thể dễ dàng tải về file cài đặt của Bluestacks. Quá trình tải về có thể mất vài phút.<br />
Sau khi tải về, nhấp chuột vào file bạn mới tải xuống để bắt đầu quá trình cài đặt. Giao diện cài đặt rất đơn giản, quá trình cặt đặt sẽ diễn ra nhanh chóng. Nếu có bất cứ vấn đề gì bạn có thể vào mục hỏi đáp của Bluestacks để tham khảo cách xử lý.<br />
<br />
<strong>Bước 2:</strong> Tải xuống file cài đặt của LandStar 7 cho máy tính PC Windows<br />
File cài đặt này có đuôi là .APK. APK là viết tắt của cụm từ tiếng Anh "Android application package" (tạm dịch là bộ cài đặt ứng dụng cho hệ điều hành Android). Bạn có thể tải về file apk này từ trang web của chúng tôi <a href="https://drive.google.com/file/d/1vSHDZvVz9EjJtpVAeKgVzJaua3D-Wwf1/view?usp=sharing">TẠI ĐÂY</a>.<br />
<br />
<strong>Bước 3:</strong> Tiến hành cài đặt LandStar 7 bằng Bluestacks<br />
Tập tin APK của LandStar 7 sau khi tải về có thể được cài đặt vào Bluestacks theo một trong các cách sau:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhấp đúp vào file APK, cách này đơn giản và nhanh nhất.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuột phải vào file APK, chọn "Open With", sau đó chọn Bluestacks.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kéo thả file APK vào màn hình ứng dụng Bluestacks</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quá trình cài đặt LandStar 7 sẽ diễn ra nhanh chóng. Ngay sau khi quá trình cài đặt kết thúc, bạn sẽ thấy biểu tượng icon của LandStar 7 trên màn hình trang chủ của Bluestacks. Nhấp chuột vào biểu tượng icon này để bắt đầu sử dụng LandStar 7 trên máy tính PC Windows.</span></span><br />
<br />
<img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p>
',
'images' => '2021080616092739e989a091af097f2762083a8ccfb10e.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy RTK',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-08-06',
'modified' => '2026-07-12',
'status' => '1',
'view' => '23109',
'slug' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '225',
'rght' => '226',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 2 => array(
'Post' => array(
'id' => '640',
'name' => 'iRTK4 Hi-Target - A Simple but not Simplistic GNSS System',
'code' => null,
'alias' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">iRTK4 Hi-Target là hệ thống thu GNSS thông minh đầy đủ tính năng được trang bị anten mới tích hợp đa kênh tiên tiến cho phép người dùng giải được các bài toán đo đạc một cách chính xác, đáng tin cậy. Tính năng Tilt-Surveying không cần hiệu chuẩn mà vẫn có thể thu thập dữ liệu ở nhiều nơi.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. RTK tiên tiến thế hệ mới<br />
<br />
Quản lý tín hiệu vệ tinh linh hoạt giúp bạn có được giải pháp chính xác hơn. Hiệu suất được cải thiện 20% trong môi trường GNSS đầy thử thách.<br />
<br />
2.IMU (Biểu tượng)<br />
<br />
Bắt đầu ngay lập tức với công nghệ bù nghiêng không cần hiệu chuẩn, hỗ trợ bạn khảo sát nhanh chóng và chính xác hoặc xác định các điểm mà không cần cân bằng cột, Sai số dưới 3cm trong phạm vi nghiêng 45 °, tăng hiệu suất làm việc lên 20%.<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/iRTK4(1).jpg" style="width: 383px; height: 131px;" /><br />
<br />
3. Sạc nhanh<br />
<br />
Sạc pin của bạn lên đến 50 phần trăm chỉ trong 50 phút với bộ chuyển đổi 45W, nhờ khả năng sạc nhanh, bạn có thể sạc lại trong thời gian ngắn hơn.<br />
<br />
4. Giao diện người dùng web (WEB UI)<br />
<br />
Cách nhanh chóng và hiệu quả để giám sát và điều khiển các thiết bị phần cứng. Ngoài ra, cung cấp quyền truy cập vào các tính năng được sử dụng phổ biến nhất thông qua trình duyệt web hiện có trên thiết bị bạn chọn — không cần tải xuống hoặc cài đặt bất kỳ thứ gì!<br />
<br />
5. Smart Base<br />
<br />
Tối ưu hóa tuyệt vời cài đặt chế độ làm việc, Tự động ghép nối Base và Rover của bạn bằng dịch vụ toàn cầu Hi-target, mở rộng phạm vi công việc và tiết kiệm thời gian của bạn.<br />
<br />
Radio ngoài thế hệ mới<br />
<br />
HDL-460A cung cấp thông tin liên lạc dữ liệu đáng tin cậy cho các ứng dụng quan trọng trong đó yêu cầu sự kết hợp của sự ổn định, hiệu suất cao và phạm vi xa.<br />
<br />
<img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br />
</span></span>',
'images' => '20210805113424adf751172d9f3d7ddcf7e526d09e3fb6.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy RTK',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-08-05',
'modified' => '2026-07-12',
'status' => '1',
'view' => '23795',
'slug' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '223',
'rght' => '224',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 3 => array(
'Post' => array(
'id' => '639',
'name' => 'Thông số kỹ thuật của một số dòng máy toàn đạc điện tử Leica (cũ): TCR-403, TCR-405, TCR-407, TCR-705, TCR-802, TCR-805',
'code' => null,
'alias' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><font color="#323232">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ: </font><span style="line-height: 107%; letter-spacing: 0.1pt;">Leica TCR-802 Power, Leica TCR-805, Leica TC-705.</span></span></span>
<h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;">
</h1>
<h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;">
<span style="font-size: 17pt; line-height: 107%; font-family: Helvetica, sans-serif; letter-spacing: 0.1pt;"><o:p></o:p></span></h1>
',
'content' => '<p>
<font color="#323232" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ:<br />
<br />
- </font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; line-height: 14.98px; letter-spacing: 0.1pt;">Leica TCR-802 Power<br />
- Leica TCR-805<br />
- Leica TC-705</span><br />
- <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica TCR 403, 405,407 Power</span></span><br />
</p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">I. Máy toàn đạc điện tử Leica TCR-802 Power</span></span></h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
1. Ống kính<br />
- Có độ phóng đại là: 30 x<br />
- Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br />
- Phạm vi điều tiêu là: 1.7m cho tới vô cực<br />
- Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br />
2. Bộ nhớ và truyền dữ liệu<br />
- Bộ nhớ trong của máy là: 24.000 điểm ghi<br />
- Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br />
3. Bàn phím và màn hình<br />
- Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br />
- Trang bị bàn phím tiêu chuẩn Alpha<br />
4. Đo góc ( Hz, V)<br />
- Có độ chính xác (ISO 171233) là: 2”<br />
- Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br />
- Phương pháp: liên tục, đối tâm, tuyệt đối<br />
- Bộ bù: tăng lên 4 lần sự bù trục<br />
- Độ chính xác cài đặt độ bù là: 2”<br />
5. Đo khoảng cách cho đến điểm phản xạ<br />
- Với gương GPR1: 3500m<br />
- Với tấm phản xạ (60 mm x 60 mm): 250m<br />
- Độ chính xác / Thời gian đo:<br />
+ Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br />
+ Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br />
+ Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br />
6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br />
7. Dọi tâm tia laser<br />
- Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br />
- Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br />
8. Nguồn pin (GEB221)<br />
- Thể loại: LithiumIon<br />
- Thời gian máy hoạt động: hơn 20 giờ<br />
- Máy có trọng lượngg: 5.1 kg<br />
9. Môi trường hoạt động:<br />
- Làm việc tốt: từ -20°C cho đến +50°C<br />
- Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br />
- Độ ẩm là: 95% không ngưng tụ</span></span><br />
<h1 style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/154253643_1379364745733010_5284105879190099443_o (1)(1).jpg" style="width: 480px; height: 360px;" /></span></span></h1>
<h1>
</h1>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Máy toàn đạc điện tử Leica TCR-805</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Ống kính<br />
- Có độ phóng đại là: 30 x<br />
- Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br />
- Phạm vi điều tiêu là: 1.7m cho tới vô cực<br />
- Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br />
2. Bộ nhớ và truyền dữ liệu<br />
- Bộ nhớ trong của máy là: 24.000 điểm ghi<br />
- Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br />
3. Bàn phím và màn hình<br />
- Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br />
- Trang bị bàn phím tiêu chuẩn Alpha<br />
4. Đo góc ( Hz, V)<br />
- Có độ chính xác (ISO 171233) là: 5”<br />
- Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br />
- Phương pháp: liên tục, đối tâm, tuyệt đối<br />
- Bộ bù: tăng lên 4 lần sự bù trục<br />
- Độ chính xác cài đặt độ bù là: 2”<br />
5. Đo khoảng cách cho đến điểm phản xạ<br />
- Với gương GPR1: 3500m<br />
- Với tấm phản xạ (60 mm x 60 mm): 250m<br />
- Độ chính xác / Thời gian đo:<br />
+ Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br />
+ Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br />
+ Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br />
6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br />
7. Dọi tâm tia laser<br />
- Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br />
- Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br />
8. Nguồn pin (GEB221)<br />
- Thể loại: LithiumIon<br />
- Thời gian máy hoạt động: hơn 20 giờ<br />
- Máy có trọng lượngg: 5.1 kg<br />
9. Môi trường hoạt động:<br />
- Làm việc tốt: từ -20°C cho đến +50°C<br />
- Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br />
- Độ ẩm là: 95% không ngưng tụ</span></span><br />
<h1 style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/abaec5a286b071ee28a19.jpg" style="width: 480px; height: 640px;" /></span></span></h1>
<h1>
</h1>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">III. Máy toàn đạc điện tử Leica TC-705</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Đo góc<br />
- Có độ chính xác là: ±5”<br />
- Cách đo: liên tục, đối tâm và tuyệt đối.<br />
2. Hệ thống bù trục<br />
- 4 trục bù nghiêng<br />
- Dải bù nghiêng là : 4’<br />
- Có độ chính xác bù trục là: ±0.5”<br />
3. Đo cạnh có gương<br />
- Khi đo bằng gương GPR1 là: 1.000m<br />
- Khi đo bằng gương GRZ4 là: 600m<br />
- Khi đo bằng gương mini GMP 101 là: 400m<br />
- Đối với gương giấy 60 x 60mm là: 250m<br />
- Có độ chính xác là: ±1mm + 1.5 ppm / 2.4 giây<br />
- Khi đo nhanh là: ±3 mm+1.5 ppm / 0.8s<br />
- Hiển thị là: 0.1 mm<br />
- Cách thức: Đổi pha với tia laze đỏ đồng trục, rõ rệt.<br />
4. Đo cạnh không gương<br />
- PinPoint R200 là : 200m<br />
- Có độ chính xác là: ±2mm + 2 ppm / 3 giây<br />
5. Ống kính<br />
- Có độ phóng đại ống kính là: 30 X<br />
- Độ mở ống kính là : 40mm<br />
- Dải điều quang: từ 1.7 m cho tới vô cùng<br />
6. Dọi tâm<br />
- Kiểu dọi tâm: bằng tia laze<br />
- Có độ chính xác là: ±1mm tại 1.5 chiều cao máy<br />
7. Màn hình, bàn phím<br />
- Được trang bị 01 Màn hình LCD rõ nét<br />
- Bàn phím gồm có chữ và số. Có chiếu sáng cho màn hình<br />
8. Quản lý dữ liệu<br />
- Có bộ nhớ trong là: 10.000 điểm nhập cùng với điểm đo được<br />
- Truyền dữ liệu: GSI-Format via RS232<br />
- Trao đổi dữ liệu: GS116 / IDEX / GS18 / dxf<br />
9. Pin của máy<br />
- Sử dụng Pin Lithium-Ion GEB 121,<br />
- Thời gian vận hành: từ 5 đến 8 tiếng<br />
10. Trọng lượng<br />
- Đầu máy nặng: 5,6 kg<br />
11. Khả năng chống nước và chống bụi<br />
- Đã đạt được tiêu chuẩn IP54<br />
- Có khả năng chịu độ ẩm lên đến 95%</span></span><br />
<br />
<h2>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IV. Máy toàn đạc điện tử Leica TCR-403; TCR-405; TCR-407</span></span></h2>
<br />
<span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Dòng sản phẩm LEICA Total Station TPS400 Power (TCR403/405/407 Power) nổi bật với chế độ đo không gương (bằng tia laser) và laser chỉ hướng.</span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" />
<span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Thừa hưởng đầy đủ các tính năng của TPS400, TPS400 Power còn được tích hợp thêm khả năng đo xa bằng tia laser không cần gương, chỉ cần ngắm vào vật có độ phản xạ đủ cao (90%). Điều này đã giúp cho TPS400 Power năng động và tiện lợi hơn.</span><br />
<br />
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">1. Ống kính:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ phóng đại: 30 x<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Trường nhìn : 1° 30’(1.66 gon) 26m tại khoảng cách 1km<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Phạm vi điều tiêu: 1.7 m đến vô cùng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Thể lưới: chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
2. Bộ nhớ, truyền dữ liệu:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Bộ nhớ trong: 24.000 điểm ghi<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Định dạng dữ liệu: GSI / DXF / XML / ASCII/XLS/ Định dạng tự do<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
3. Bàn phím và màn hình<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Màn hình: 01 màn hình tinh thể lỏng LCD <a href="http://tracdiathanhdat.vn/gioi-thieu-cong-ty-cp-cn-va-tm-thanh-dat.htm" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;">160×280</a> pixel, đèn chiếu sang 5 cấp<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Bàn phím tiêu chuẩn Alpha<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
4. Đo góc ( Hz, V)<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ chính xác (ISO 171233): 5”<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Hiển thị: 1” / 0.1 mgon / 0.01 mil<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Phương pháp: tuyệt đối, liên tục, đối tâm<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Bộ bù: tăng lên bốn lần sự bù trục<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ chính xác thiết đặt độ bù: 2”</span></span></p>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">5. Đo khoảng cách tới điểm phản xạ:</span></span></p>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Đo không gương (đo Laser RL): 170 m </span></span></p>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Gương GPR1: 3500m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Tấm phản xạ (60mmx60mm): 250m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ chính xác/ Thời gian đo:<br style="margin: 0px; padding: 0px;" />
+ Đo chính xác (Fine) : ±(5 mm+2 ppmD)/ 2.4 giây,<br style="margin: 0px; padding: 0px;" />
+ Đo nhanh: ±(5mm+2ppmD)/0.8 giây,<br style="margin: 0px; padding: 0px;" />
+ Đo đuổi: ±(5mm+2ppmD)/< 0.15 s<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
6. Hệ điều hành: Windows CE: 5.0 Core<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
7. Dọi tâm laser:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Loại : Điểm laser,chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ chính xác dọi tâm:1.5mm trên 1.5m chiều cao máy<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
8. Nguồn pin (GEB221):<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Loại: LithiumIon<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Thời gian làm việc: hơn 20 h<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Trọng lượng: 5.1 kg<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
9. Môi trường hoạt động:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Biên độ làm việc: từ -20°C tới +50°C<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Chịu nước và bụi (IEC 60529): IP55<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ ẩm: 95% không ngưng tụ</span></span><br />
</p>
<table border="1" cellpadding="0" cellspacing="0" style="width:619px;" width="619">
<tbody>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu kỹ thuật </strong></span></span></td>
<td style="width:102px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>403</strong></span></span></td>
<td style="width:132px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>405</strong></span></span></td>
<td style="width:120px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>407</strong></span></span></td>
</tr>
<tr>
<td colspan="3" style="width:499px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Độ góc (Hz, V)</strong></span></span></td>
<td style="width:120px;">
</td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương thức</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo liện tục tuyệt đối</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gốc hiển thị (bước nhảy)</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″ / 0.1 mgon / 0.01 mil</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br />
(ISO 17123 -3)</span></span></td>
<td style="width:102px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3″ (1 mgon)</span></span></td>
<td style="width:132px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5″ (1.5 mgon)</span></span></td>
<td style="width:120px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7″ (2 mgon)</span></span></td>
</tr>
<tr>
<td colspan="4" style="width:619px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Ống kính</strong></span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ số phóng đại</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">30x</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trưng nhìn</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1° 30′ (26 m at 1 km)</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khỏang cách nhìn gần I</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7m</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưới chữ thập</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiếu sáng</span></span></td>
</tr>
<tr>
<td colspan="4" style="width:619px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Bù nghiêng</strong></span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống bù nghiêng</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng 2 trục</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Setting accuracy</span></span></td>
<td style="width:102px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″</span></span></td>
<td style="width:132px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5″</span></span></td>
<td style="width:120px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2″</span></span></td>
</tr>
<tr>
<td colspan="4" style="width:619px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Đo khoảng cách bằng tia hồng ngoại</strong></span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring range with circular prism GPR1</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.500 m</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring with reflective foil<br />
(60 mm x 60 mm)</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">250m</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br />
(ISO 17123 -4)<br />
(fine/quick/tracking)</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2mm + 2 ppm/5 mm + 2 ppm/5 mm + 2 ppm</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">< 1 sec/< 0.5 sec/< 0.15 sec</span></span></td>
</tr>
<tr>
<td colspan="4" style="width:619px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chính xác, nhanh, do liên tục.</strong></span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo khoảng cách không gương</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R100 (“power”) 170m (90 % reflective)</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(Medium atmospheric conditions)</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R300 (“ultra”) > 500 m (90 % reflective)<br />
Laser at GPR circular reflector 7’500 m</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3mm+2 ppm/5 mm+2 ppm</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">typ. 3 s/1 s</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kíck cỡ điểm với 100 m</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">12mm x 40 mm</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu</strong></span></span></td>
<td colspan="3" style="width:354px;">
</td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ trong</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 Điểm đo</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao tiếp</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RS232</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng dữ liệu</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GSI/ASCII/dxf/Freely definable formats</span></span></td>
</tr>
</tbody>
</table>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"> </span></span></span></span></p>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="width: 250px; height: 100px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>',
'images' => '202107301638040599a20d3fb57fe46b312b506c17e5cc.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy toàn đạc điện tử ',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-30',
'modified' => '2026-07-12',
'status' => '1',
'view' => '19533',
'slug' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '221',
'rght' => '222',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 4 => array(
'Post' => array(
'id' => '638',
'name' => 'Những lỗi thường gặp ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m',
'code' => null,
'alias' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span>',
'content' => '<br />
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tham khảo một số lỗi và ý nghĩa của những lỗi này ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m</span></span><br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/1565334829-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-dathop-02.jpg" style="width: 620px; height: 477px;" /><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp các lỗi trên hãy liên hệ với chúng tôi qua số hotline để được khắc phục nhé!<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/hotline(1).png" style="width: 250px; height: 100px;" /></span></span><br />
',
'images' => '2021072917090604e0ee7f57cb99fce8677b2f946c35af.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy thuỷ bình điện tử',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-29',
'modified' => '2026-07-12',
'status' => '1',
'view' => '14983',
'slug' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '219',
'rght' => '220',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 5 => array(
'Post' => array(
'id' => '637',
'name' => 'So sánh giữa Garmin GPSMAP 66S vs GPSMAP 64S',
'code' => null,
'alias' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tham khảo sự khác nhau giữa hai dòng máy định vị GPSMAP 66s và 64s của hãng Garmin và những ưu điểm vượt trội mà Garmin đã mang tới cho dòng máy GPSMAP 66s nhé.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>GPSMAP 66s</strong>: Thiết bị cầm tay đa vệ tinh tích hợp cảm biến.</span></span><br />
<br />
<strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">GPSMAP 64s</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">: </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);">Độ nhạy máy thu cao, thiết bị có thể cùng lúc nhận được tín hiệu vệ tinh từ hai hệ thống GPS và GLONASS. GPSMAP 64s</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);"> kèm theo khí áp kế để đo cao độ, la bàn điện tử, kết nối USB tốc độ cao, hỗ trợ khe cắm thẻ nhớ, đồng thời có khả chia sẽ dữ liệu bằng Wireless với các thiết bị Garmin tương thích khác.</span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/So sánh GPS 66 và 64.jpg" style="width: 690px; height: 459px;" /><br />
<br />
<br />
<u><strong>>>> Cùng so sánh thông số kỹ thuật của hai dòng máy GPSMAP 66s và 64s:</strong></u></span></span><br />
<br />
<br />
<table border="1" cellpadding="0" cellspacing="0">
<tbody>
<tr>
<td style="width:161px;">
</td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 66s</strong></span></span><br />
</td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 64s</strong></span></span><br />
</td>
</tr>
<tr>
<td style="width:161px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước tổng thể:</span></span><br />
</td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.2 x 16.3 x 3.5cm</span></span><br />
</td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.1 x 16 x 3.6cm</span></span><br />
</td>
</tr>
<tr>
<td style="width:161px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước màn hình:</span></span><br />
</td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3 inches</span></span><br />
</td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.6 inches</span></span><br />
</td>
</tr>
<tr>
<td style="width:161px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ phân giải màn hình:</span></span><br />
</td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">240 x 400p (pixel)</span></span><br />
</td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">160 x 240p (pixel)</span></span><br />
</td>
</tr>
<tr>
<td style="width:161px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ khả năng:</span></span><br />
</td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">16GB</span></span><br />
</td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4GB</span></span><br />
</td>
</tr>
<tr>
<td style="width:161px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Waypoint/Routes/ Tracklog:</span></span></td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">20000 Điểm, 250 GPX Track và 300 điểm được lưu</span></span></td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 điểm, 200 điểm được lưu</span></span></td>
</tr>
</tbody>
</table>
<br />
<ul>
<li>
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Theo dõi hoạt động thời tiết </span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tải xuống hình ảnh vệ tinh trực tiếp (không đăng ký)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chắc chắn theo tiêu chuẩn MIL-STD 810G cho hiệu suất nhiệt, sốc và nước.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhật ký Rinex</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối WiFi / Bluetooth</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Thiết kế phần cứng</strong><br />
Từ góc độ thiết kế, cả hai thiết bị đều cực kỳ giống nhau, với một vài khác biệt nhỏ về kích thước và màn hình<strong>. </strong>GPSMAP 66S có kích thước tổng thể lớn hơn một chút, nhưng sự khác biệt là gần như không thể nhận ra. Ngoài những thay đổi trực quan rõ ràng, họ cảm thấy khá giống với mẫu cũ. Những thay đổi khác là các nút nhỏ gọn hơn một chút nhưng rộng hơn. Các chức năng của nút giống nhau mặc dù phiên bản GPSMAP 66s có menu khác.<br />
<br />
Nút nguồn được đặt ở phía trên của thiết bị. Vị trí trên GPSMAP 64 có vẻ được ưu thích hơn vì bật / tắt dễ dàng nhưng bạn có thể hiểu lý do tại sao Garmin muốn thực hiện thay đổi này vì nó ít có khả năng bị hỏng khi bật thiết bị và lãng phí điện năng của bạn.<br />
<br />
Khác với những thay đổi đó và màn hình lớn hơn một chút, tất cả các cổng đều giống nhau, mặc dù Garmin đã thay đổi dây nguồn / dữ liệu thành MicroUSB. Khe cắm thẻ Micro SD có thể bên dưới pin.<br />
<br />
<strong>Tuổi thọ pin</strong><br />
Cả hai thiết bị đều hoạt động trên hai pin AA và tuổi thọ thông thường sẽ là 16 giờ mặc dù điều đó chủ yếu phụ thuộc vào chức năng ứng dụng và sử dụng GPS của bạn. GPSMAP 66 mới cũng có chức năng "<strong>Expedition"</strong> , giúp tăng đáng kể thời lượng pin của thiết bị bằng cách hạn chế các chức năng phần mềm tự động như điểm theo dõi, thời gian hiển thị và vào chế độ năng lượng thấp.<br />
<br />
<strong>Cách bật chế độ Expedition trên GPSMAP 66s</strong><br />
<br />
Chuyển đến menu chính của thiết bị> Chọn <strong>Cài đặt</strong> > Chọn "<strong>Expedition"</strong> . Sau đó, bạn sẽ được yêu cầu chọn "<em>Tự động, Nhắc hoặc Không bao giờ</em>".<br />
Chọn <em>Tự động</em> sẽ tự động đặt thiết bị sang chế độ thám hiểm sau hai phút hoạt động.<br />
Chọn <em>Nhắc </em>có nghĩa là lần sau khi bạn tắt thiết bị, nó sẽ yêu cầu bạn bật chế độ thám hiểm thay vì tắt.<br />
Chọn <em>Không bao giờ</em> sẽ tắt bất kỳ hình thức chế độ thám hiểm nào bạn đã chạy (Nhắc hoặc Tự động).<br />
<br />
<strong>Các tính năng phần mềm khả dụng trên cả hai thiết bị</strong><br />
Cả hai thiết bị đều có thể ghi lại các điểm / tuyến đường và nhật ký theo dõi, mặc dù GPSMAP 66s có thể ghi lại nhiều hơn.<br />
<br />
Một số tính năng của cả hai dòng máy:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính diện tích trên các thiết bị (chỉ cần đi bộ chu vi của khu vực).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tải bản đồ tùy chỉnh - bạn có thể tải bản đồ tùy chỉnh tương thích với các thiết bị của Garmin (Garmin Topo hoặc thậm chí City Nav Maps). Nếu bạn tải một trong hai bản đồ này, thì bạn sẽ có quyền truy cập vào chức năng định tuyến tự động trên thiết bị. * Bạn cần sử dụng bản đồ Topo bản FULL để định tuyến.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Geocaching thân thiện - ứng dụng Geocaching được tải sẵn trên các thiết bị, mặc dù vậy bạn cần phải đăng ký thiết bị.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lịch săn / cá - được tải sẵn trên thiết bị</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin Mặt trời và Mặt trăng - được tải sẵn trên thiết bị</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng xem ảnh </span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Kết nối GARMIN</strong><br />
<br />
Garmin Connect - khả dụng trên cả hai thiết bị cho phép thông tin hoạt động được gửi đến tài khoản kết nối Garmin của bạn và cho phép các tính năng được kết nối với điện thoại thông minh của bạn. Các tính năng được kết nối bao gồm Thông báo điện thoại, LiveTrack, GroupTrack.<br />
<br />
<strong>Chức năng cảm biến</strong><br />
Cả hai thiết bị GPS cầm tay trên đều có thể đo độ cao áp kế, la bàn bù 3 trục nghiêng. Việc đo độ cao áp kế sẽ có thể cung cấp cho bạn thông tin về những thay đổi của điều kiện thời tiết (giả sử bạn vẫn ở cùng độ cao) mặc dù nó cần phải được hiệu chỉnh đầy đủ. Cảm biến này cũng có thể được sử dụng để đo lường thay đổi độ cao của bạn và thậm chí đo lường thay đổi độ dốc AVG khi nhìn vào dữ liệu điểm của bạn.<br />
<br />
<strong>>>> Các tính năng phần mềm CHỈ khả dụng trên GPSMAP 66s:</strong><br />
<br />
- Tương thích với ứng dụng khám phá của Garmin - Sau khi được kết nối với ứng dụng điện thoại thông minh của bạn, ứng dụng khám phá của Garmin sẽ tự động đồng bộ hóa và chia sẻ điểm tham chiếu, tuyến đường và tuyến đường với thiết bị của bạn. Bạn cũng có thể tải bản đồ về điện thoại thông minh của mình để truy cập ngoại tuyến.<br />
<br />
- Theo dõi hoạt động thời tiết <br />
Garmin đã tăng thông tin thời tiết của họ một cách đáng kể với lần lặp này. Bây giờ bạn có thể nhận được rất nhiều dữ liệu thời tiết dựa trên thông tin dự báo thời gian thực. Họ có các tùy chọn bản đồ dự đoán riêng biệt về nhiệt độ, gió, mưa và mây. Nó cũng cung cấp radar thời tiết trực tiếp để bạn sẵn sàng thay đổi kế hoạch nếu bạn sắp bị bắt. Tính năng này không phụ thuộc vào kết nối Bluetooth hoạt động với điện thoại thông minh của bạn có bộ phận tiếp nhận. <br />
Hình ảnh vệ tinh hoạt động chính xác giống như trên loạt GPSMAP 64s nhưng bạn không còn phải trả tiền cho nó nữa.<br />
<br />
- Điểm mới của dòng GPSMAP 66s là khả năng tương thích với cửa hàng Connect Connect của Garmin, về cơ bản là 'App Store' của Garmin. <br />
<br />
- Chức năng InReach Remote: bạn có thể điều khiển thiết bị inReach mini của mình.<br />
<br />
- Đèn pin và SOS <br />
Một tính năng độc đáo khác là <strong>đèn pin LED</strong> rất sáng và<strong> đèn hiệu SOS</strong> có thể được sử dụng để báo hiệu sự giúp đỡ. Chức năng SOS chỉ là một nét khẩn cấp. Tuy nhiên, bạn cũng có thể đặt đèn pin nhấp nháy trong khoảng 1-9 lần mỗi giây.<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp.jpg" style="width: 250px; height: 100px;" /><br />
<br />
</span></span>',
'images' => '202408021508551192007d993f13fc9de7ce32bd9bab16.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy định vị GPS cầm tay Garmin',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-28',
'modified' => '2026-07-12',
'status' => '1',
'view' => '27644',
'slug' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '217',
'rght' => '218',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 6 => array(
'Post' => array(
'id' => '636',
'name' => 'Máy thuỷ bình kỹ thuật số Leica LS10 và LS15',
'code' => null,
'alias' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span></span>',
'content' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10, LS15 có thể làm việc liên tục nhiều giờ, độ sai lệch gần như tuyệt đối không ảnh hưởng tới độ chính xác kết quả đo.<br />
<br />
Leica LS10, LS15 thường được dùng để đo chênh cao, đo khoảng cách với yêu cầu độ chính xác cao tuyệt đối. Máy có thể dẫn cao độ phục vụ cho vẽ thành lập bản đồ.</span></span><br />
<br />
<ul>
<li>
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> Tính linh hoạt </span></span></strong></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dòng máy thủy bình Leica LS10, LS15 được thiết kế để khảo sát, thực hiện san lấp mặt bằng thường xuyên trên các công trường xây dựng, kiểm tra hoặc giám sát các tòa nhà, đường sắt hoặc đường bộ. Với Leica LS10, LS15 bạn luôn có sẵn công cụ làm việc phù hợp.</span></span><br />
<br />
<ul>
<li>
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác và độ tin cậy cao nhất</span></span></strong></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bạn sẽ nhận được kết quả đáng tin cậy và chính xác ngay. Chất lượng quang học hàng đầu của Leica Geystems luôn mang lại hình ảnh có độ tương phản cao và giúp việc đọc chính xác và dễ dàng ngay cả trong điều kiện ánh sáng không thuận lợi. Do sự ổn định nhiệt độ cao, Leica LS10, LS15 luôn mang lại kết quả đáng tin cậy không ảnh hưởng bởi bức xạ mặt trời trực tiếp.</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chăm sóc khách hàng chỉ với một cú nhấp chuột.</strong> </span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông qua <a href="https://leica-geosystems.com/services-and-support/customer-support-services/active-customer-care">ACTIVE CUSTOMER CARE</a> - một mạng lưới toàn cầu gồm các chuyên gia giàu kinh nghiệm bạn sẽ được hướng dẫn một cách thành thạo mọi vấn đề:<br />
- Loại bỏ sự chậm trễ với dịch vụ kỹ thuật cao cấp<br />
- Hoàn thành công việc nhanh hơn với hỗ trợ tư vấn tuyệt vời<br />
- Tránh các lần truy cập trang web tốn kém với dịch vụ trực tuyến để gửi và nhận dữ liệu trực tiếp từ hiện trườn</span></span>g.<br />
<br />
<ul>
<li>
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cài đặt nhanh chóng và thuận tiện</span></span></strong></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả và giảm thời gian làm việc với Leica LS10, LS15. Sử dụng núm lấy nét để cài đặt nhanh chóng. Chuyển động tốt mang lại một hình ảnh hoàn hảo. LS10 & LS15 cung cấp cho bạn một mức độ bảo mật cao!</span></span><br />
<br />
<br />
<iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="394" src="https://www.youtube.com/embed/lBe6-DiokBQ" title="YouTube video player" width="700"></iframe>',
'images' => '20221227151040ffcdeffa3829f4a633ea0b404e2b4a0a.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy thuỷ bình Leica',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-25',
'modified' => '2026-07-12',
'status' => '1',
'view' => '26500',
'slug' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '215',
'rght' => '216',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 7 => array(
'Post' => array(
'id' => '635',
'name' => 'Ống nhòm và những lưu ý khi mua ống nhòm',
'code' => null,
'alias' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tìm hiểu về ống nhòm và tham khảo một số lưu ý khi chọn ống nhòm!</span></span>',
'content' => '<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Ống nhòm là gì?</strong></span></span></h2>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm, còn gọi là ống ngắm hay con mắt xa, là một hệ hai kính viễn vọng quang học được gắn cạnh nhau và cùng hướng, cho phép người quan sát đặt cả hai mắt để quan sát các vật ở xa. Cấu tạo gồm vật kính, thị kính và thường có thêm hệ thống lăng kính. Vật kính bao gồm một thấu kính hội tụ, thị kính là thấu kính hội tụ có tiêu cự nhỏ nhất nhưng sẽ làm hình ảnh bị ngược nên cần thêm lăng kính đảo ảnh.<br />
<br />
* Cấu tạo ống nhòm gồm một hệ thống hai thấu kính hội tụ đặt đồng trục.</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vật kính L1: tiêu cự f1 rất dài (vài m)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thị kính L2: tiêu cự f2 ngắn (vài cm) và được sử dụng như kính lúp</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách giữa thị kính và vật kính thay đổi được.<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/Cấu tạo ống nhòm.png" style="width: 300px; height: 383px;" /><br />
<br />
</span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Tìm hiểu về các thông số về ống nhòm</strong></span></span></h2>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thường ta hay nhìn thấy ký hiệu 7×50, 8×40, 10×42, 15×70, 25×100… ở trên các ống nhòm. Hai chữ số này nói lên điều gì?<br />
<br />
<u>Ví dụ</u>: <span style="color:#000000;"><span style="text-align: justify;">Ống nhòm Nikon MONARCH 7 10x42</span></span><br />
<br />
<strong>10</strong> - số đằng trước dấu nhân (x) sẽ là độ phóng đại của ống nhòm đó (tức là 10 lần).<br />
<strong>42</strong> - số đằng sau dấu nhân sẽ là đường kính của vật kính ống nhòm theo đơn vị millimet ( tức là 42mm).<br />
<br />
Thông số độ phóng đại có nghĩa là bạn sẽ nhìn vật đó gần lại bạn 10 lần theo tỉ lệ xấp xỉ 1/10. Có nghĩa là bạn nhìn một vật xa 1km bằng ống nhòm, thì khi đó như bằng mắt thường bạn nhìn 100m.<br />
<br />
Nhiều bạn hay thắc mắc một câu hỏi khi mua ống nhòm: <strong>ống nhòm này nhìn bao xa?</strong> Thực chất cái xa vô cùng mà mình nói ở đây nó là một vật đủ lớn mà khi nhìn qua ống nhòm chúng ta có thể thấy nó và nhìn được hình dạng của nó. Điều quan trọng mà các bạn hay bỏ quên đó là ”chất lượng ảnh như thế nào?” thì rất ít bạn quan tâm. Đây là điều quan trọng để đánh giá một chiếc ống nhòm tốt hay không?</span></span></p>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường kính vật kính là thông số được tính bằng đơn vị mm. Nếu vật kính càng lớn thì khả năng thu sáng và chất lượng ảnh của bạn sẽ càng tốt và ngược lại. Tuy nhiên nếu mà lớn quá thì một trong những nhược điểm đó là ảnh quan sát thu được sẽ bị sai sắc (là điều không thể tránh khỏi). Bởi vậy khi lựa chọn mua ống nhòm thì các bạn nên chọn sao cho phù hợp với độ phóng đại ống nhòm mà mình mong muốn. Ví dụ 7×50, 8×40, 10×42, 10×50, 12×60, 15×70…</span></span></p>
<p>
</p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Xuất xứ tất cả các loại ống nhòm hiện nay</strong></span></span></h2>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm hiện nay có ba nguồn gốc xuất xứ chính, đó là tự lực sản xuất sản phẩm, OEM và ODM. Vậy những khái niệm này là gì?</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Những sản phẩm đến từ các thương hiệu tự lực sản xuất có nghĩa là ống nhòm của thương hiệu này được thiết kế và gia công bởi chính một đơn vị. Tuy nhiên hiện nay có khá ít thương hiệu có thể tự lực sản xuất được mà không nhờ bên thứ ba. Đối với những sản phẩm được tự lực sản xuất này thì sẽ mang đậm dấu ấn của thương hiệu và không bị ảnh hưởng bởi các yếu tố kỹ thuật từ các bên. Tuy nhiên những chiếc ống nhòm được tự lực sản xuất có giá thành khá cao.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm <strong>OEM</strong> là những chiếc ống nhòm được công ty chủ chủ quản thiết kế nhưng lại không trực tiếp gia công, mà phải nhờ đến một bên thứ 3. Đơn vị gia công sẽ hoàn thiện sản phẩm dựa trên bản thiết kế và chịu sự kiểm soát chất lượng từ đơn vị chủ quản thiết kế. Với hình thức này thì sản phẩm thường có giá thành rẻ hơn nhưng về dấu ấn thương hiệu của sản phẩm thì không nổi bật nhiều.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Và hình thức cuối cùng là sản phẩm <strong>ODM</strong>, những sản phẩm ống nhòm thường đến từ các thương hiệu có khả năng kinh doanh nhưng không có khả năng thiết kế hay gia công sản phẩm. Ống nhòm của những thương hiệu này sẽ được đặt thiết kế và gia công ở một đơn vị nào đó và in thương hiệu của mình lên.</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc xác định được nguồn gốc của sản phẩm cũng là cách chọn mua ống nhòm mà bạn nên lưu tâm. Mỗi thương hiệu đều có một ưu nhược điểm riêng, tùy vào nhu cầu bạn có thể lựa phương thức sản xuất phù hợp.<br />
<br />
</span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Phân loại các loại ống nhòm hiện nay theo chức năng</strong></span></span></h2>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường có rất nhiều loại ống nhòm khác nhau, dưới đây là một số loại ống nhòm phố biến được nhiều người lựa chọn nhất.<br />
- <strong>Ống nhòm mini</strong> là loại ống nhòm có kích thước gọn nhẹ đến bất ngờ, tuy nhiên tầm nhìn thì hơi hạn chế. Loại ống nhòm này có kích thước rất nhỏ nên có thể bỏ trong balo, túi xách để mang theo bên người, trong các chuyên tham quan, thám hiểm, du lịch.<br />
- <strong>Ống nhòm ban đêm</strong> là loại ống nhòm có khả năng nhìn xuyên bóng tối nhờ được trang bị đèn hồng ngoại. Hình ảnh nhìn được trong bóng tối qua ống nhòm hồng ngoại thường không màu. Ngoài ra, loại ống nhòm hồng ngoài ngày còn được tích hợp tích năng ghi hình, chụp ảnh.<br />
- <strong>Ống nhòm chụp ảnh</strong> là loại ống nhòm được tích hợp thêm chức năng bắt lại những khoảnh khắc đẹp khi chúng ta quan sát. Tuy nhiên, vì không phải là thiết bị chuyên về chụp ảnh nên hình ảnh chụp được có chất lượng còn hạn chế.<br />
- <strong>Ống nhòm đo khoảng cách</strong> là loại ống nhòm ngoài việc quan sát một đối tượng thì còn đo được khoảng cách từ chỗ chúng ta đứng đến vật thể. Ngoài ra, loại ống nhòm này còn được tích hợp tính năng đo góc, đo chiều cao<br />
- <strong>Ống nhòm nhiệt</strong> loại ống nhòm hiện đại có khả năng hiển thị thân nhiệt của đối tượng bạn đang quan sát, cũng như phân biệt được đối tượng với môi trường xung quanh nhờ sự chênh lệch nhiệt độ.<br />
<br />
</span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Một số lưu ý khi chọn ống nhòm phù hợp với nhu cầu</strong></span></span></h2>
<p>
</p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.1 Kích thước ống nhòm</strong></span></span></h3>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ống nhòm có kích thước lớn Full-Size (8x42, 10x50)<br />
Các dòng ống nhòm có kích thước lớn thường thu nhận ánh sáng tốt hơn, có thể xem và quan sát trong điều kiện ánh sáng yếu như lúc bình minh hay hoàng hôn. Các ống nhòm này sẽ cung cấp cho bạn cái nhìn rộng lớn về quang cảnh phía trước, thích hợp cho ngắm chim, động vật hoang dã,... nhưng ngược lại kích thước của chúng lại lớn và thường rất nặng.<br />
<br />
- Ống nhòm có kích thước trung bình Mid-Size (7x40, 16x32, 10x42)<br />
Các dòng ống nhòm có kích thước trung bình thường được sử dụng cho ngắm cảnh thiên nhiên, cho các hoạt động du lịch dã ngoại hoặc sử dụng để quan sát các buổi biểu diễn, xem các trận bóng đá,... Ống nhòm này có kích thước vừa phải, khả năng quan sát tốt, trọng lượng phù hợp với mọi người. Tuy nhiên mức độ truyền dẫn ánh sáng lại không được bằng ống nhòm có kích thước lớn.<br />
<br />
- Ống nhòm có kích thước nhỏ gọn - ống nhòm mini (6x18, 8x21)<br />
Các loại ống nhòm này thường thích hợp để sử dụng cho các hoạt động ban ngày. Đây là loại ống nhòm có kích thước nhỏ gọn, cầm vừa tay, thoải mái khi sử dụng trong thời gian dài.</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/genmedia_PIC1739447_RL_02_w1500_h1500_c217224230255(1).jpg" style="width: 420px; height: 420px;" /></span></span></p>
<p style="text-align: center;">
</p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.2 Độ phóng đại của ống nhòm</strong></span></span></h3>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi ống nhòm thường được xác định bởi hai cặp số. Số đầu tiên chỉ độ phóng đại của ống nhòm và số thứ 2 thể hiện đường kính vật kính của ống nhòm. Ở đây ta thấy đối với ống nhòm có độ phóng đại lớn hình ảnh quan sát được sẽ càng gần hơn. Tuy nhiên, nếu bạn chọn ống nhòm có độ phóng đại quá lớn, ống nhòm siêu zoom thì kích thước lớn sẽ làm tăng độ rung khi tay bạn cầm không chắc dẫn đến hiện tượng mỏi mắt.<br />
<br />
</span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.3 Đường kính ống kính mục tiêu rộng</strong></span></span></h3>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giống như độ phóng đại, thông số thứ 2 của ống nhòm là về đường kính ống kính vật kính. Đường kính ống kính càng rộng cho phép tiếp nhận càng nhiều ánh sáng hơn. Khi nhiều ánh sáng bạn sẽ quan sát thấy hình ảnh tươi sáng hơn đặc biệt là trong điều kiện ánh sáng yếu như hoàng hôn hay lúc bình minh.</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ong-nhom-hong-ngoai-2-mat-co-ghi-hinh-4x50mm-equinox-z_2253.png" style="width: 420px; height: 329px;" /></span></span></p>
<p style="text-align: center;">
</p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.4 Thoát sinh học - Exit Pupil</strong></span></span></h3>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ thoát sinh học cho biết ảnh, độ sáng của vật thể khi đang quan sát. Nếu thông số này lớn sẽ làm cho hình ảnh quan sát được rõ nét hơn, tươi sáng hơn. Cách tính toán thông số này bằng cách lấy đường kính phóng đại chia cho độ phóng đại của ống kính. Nếu thông số này nằm ở ngưỡng 7 thì đó là ống kính tốt có thể lựa chọn để quan sát các vật trong ánh trời sáng trăng, lúc ánh sáng yếu, ở ngưỡng 5mm hoặc cao hơn sẽ thích hợp cho quan sát ban ngày hoặc ánh sáng yếu.<br />
<br />
</span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.5 Khoảng cách đặt mắt - Relief Eye</strong></span></span></h3>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Relief Eye là khoảng cách đặt mắt giữa thị kính tới mắt của bạn sao cho khả năng quan sát tốt nhất thoải mái nhất. Khoảng đặt mắt càng lớn bạn lại càng phải đưa ống nhòm ra xa hơn so với mắt mình, nhưng lại tốt đối với những người đeo kính (đối với những người đeo kính nên chọn thông số này là 11mm hoặc cao hơn).<br />
<br />
</span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.6 Trường nhìn</strong></span></span></h3>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trường nhìn là thông số cho phép bạn biết độ rộng khu vực mình muốn quan sát tại khoảng cách 1000m từ nơi bạn đang đứng. Trường nhìn rộng để quan sát thiên nhiên, quan sát động vật, trường nhìn hẹp giúp quan sát các đối tượng ít di chuyển.</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/nikon-coolshot-40-i-4(1).jpg" style="width: 420px; height: 420px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.7 Hệ thống lấy nét</strong></span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm thường được trang bị hệ thống lấy nét ở trung tâm cho cả hai mắt, hoặc điều chỉnh diop trên cả hai mắt. Việc điều chỉnh diop trên hai mắt giúp bù đắp những hạn chế về thị lực giữa hai mắt của bạn.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.8 Lớp phủ thấu kính</strong></span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm giá rẻ thường không được tráng phủ nhiều lớp ra vậy cảm giác nhìn qua ống nhòm này thường mờ và không rõ nét. Lớp phủ thấu kính giúp giảm sự phản xạ ánh sáng và tăng khả năng truyền dẫn ánh sáng.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.9 Khả năng chống nước và kháng thời tiết</strong></span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng chống nước trên ống nhòm có thể là khả năng chịu nước, khả năng chống thấm, khi sử dụng ở điều kiện thời tiết thay đổi, nhiệt độ thay đổi.<br />
Các loại ống nhòm du lịch thường được trang bị khả năng chống nước mưa, ống nhòm quân sự, ống nhòm hải quân có thể được trang bị thêm khả năng chịu được áp lực nước hoặc nổi trên mặt nước.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.10 Khả năng chống đọng sương</strong></span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm giá rẻ thường bị mờ sương khi di chuyển qua lại giữa các vùng có nhiệt độ khác nhau. Mờ sương gây nhiều phiền toái cho bạn, thậm chí có thể làm hỏng ống nhòm nếu không loại bỏ độ ẩm đó ra khỏi ống nhòm.<br />
Hiện nay, các ống nhòm chuyên dụng, ống nhòm cao cấp đã được bơm các loại khí trơ, khí nitor bên trong ống nhòm để tránh gây hiện tượng ngưng tụ hơi nước. Điều này giúp bảo vệ ống nhòm của bạn tránh đọng sương lên bền mặt ống kính.</span></span><br />
<br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Địa chỉ mua ống nhòm/ ống nhòm đo khoảng cách uy tín</span></span></h2>
<p id="2-dia-chi-mua-thiet-bi-may-bay-khong-nguoi-lai-uav-uy-tin" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;">
</p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại ống nhòm/ ống nhòm đo khoảng cách của các hãng Leica, Nikon, Barska, Garmin, Terrinox, Steiner, SNDWAY, ... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<div style="margin: 0px; padding: 0px; line-height: 20px;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="color: rgb(51, 51, 51); text-align: justify;"> </span><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div>
<br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" />
<br style="margin: 0px; padding: 0px;" />
Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" />
Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" />
Tel: 024.37764930<br style="margin: 0px; padding: 0px;" />
Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" />
Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" />
Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"> </span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span><br />
',
'images' => '20210714155415df03af942339bf722676fd2f752f2a1f.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'ống nhòm đo khoảng cách',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-14',
'modified' => '2026-07-12',
'status' => '1',
'view' => '24581',
'slug' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '213',
'rght' => '214',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 8 => array(
'Post' => array(
'id' => '634',
'name' => 'Phụ kiện trắc địa',
'code' => null,
'alias' => 'phu-kien-trac-dia',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span>',
'content' => '<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Phụ kiện trắc địa là gì?</span></span></h2>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span></span></p>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hầu hết những phụ kiện trắc địa đều thiết kế có thể tách rời với máy, phòng trong những trường hợp bị hư hỏng, chỉ phải thay thế phụ kiện mới. Điều này khiến cho việc lắp ráp phụ kiện cũng như sử dụng các máy trắc địa được linh hoạt với mọi trường hợp.<br />
Phụ kiện đo đạc, trắc địa bao gồm nhiều loại khác nhau ứng dụng cho các thiết bị đo đạc ( máy thủy bình, máy kinh vĩ điện tử, máy toàn đạc điện tử, máy định vị GPS) như: thước thép, bật mực, đế dọi tâm, thước đẩy bánh xe, mốc sứ, thùng máy, gương sào, đế dọi tâm, chân mia, dây cáp, pin sạc,…</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/PHỤ KIỆN TRẮC ĐỊA(2).png" style="width: 680px; height: 544px;" /></span></span></p>
<p style="text-align: center;">
</p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lưu ý khi lựa chọn phụ kiện trắc địa</span></span></h2>
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải đảm bảo phù hợp với cấu tạo của máy, chức năng của máy.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải cùng hãng sản xuất hoặc phải là sản phẩm chính hãng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải phù hợp với công suất của máy, tránh trường hợp chọn phụ kiện có công suất thấp hoặc lớn hơn công suất thực của máy gây hư hỏng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải có cấu tạo tính năng tương đồng với từng đời máy</span></span></li>
</ul>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Phụ kiện máy(2).jpg" style="width: 620px; height: 803px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Địa chỉ mua phụ kiện trắc địa uy tín</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại phụ kiện trắc địa: chân máy toàn đạc, chân máy thủy bình, mia 5m, mia Invar, sào gương, pin máy toàn đạc, sạc pin máy toàn đạc, đế máy, cáp trút số liệu,... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;">
<br style="margin: 0px; padding: 0px;" />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> </span><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></span></span></div>
<br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" />
<br style="margin: 0px; padding: 0px;" />
Số 145 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" />
Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" />
Tel: 024.37764930<br style="margin: 0px; padding: 0px;" />
Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" />
Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" />
Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" />
<span style="margin: 0px; padding: 0px;"> </span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" />
<span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span></span></span>',
'images' => '20211207150823dc9ff8b8d2712352c76fd4e56030baca.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Phụ kiện trắc địa',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-12',
'modified' => '2026-07-12',
'status' => '1',
'view' => '24887',
'slug' => 'phu-kien-trac-dia',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '211',
'rght' => '212',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 9 => array(
'Post' => array(
'id' => '632',
'name' => 'Một số lưu ý khi chọn mua máy bộ đàm',
'code' => null,
'alias' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng chúng tôi tham khảo một số lưu ý để lựa chọn cho mình một chiếc bộ đàm phù hợp nhé!</span></span>',
'content' => '<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Lựa chọn băng tần sử dụng</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm cầm tay và máy bộ đàm cố định có 2 loại băng tần là VHF (136 – 174MHz) và UHF (400 – 527MHz).<br />
<br />
Nếu mua thêm để dùng chung với máy có sẵn, phải xác định máy bộ đàm đang dùng là loại băng tần nào (VHF hay UHF) và model là gì. Trong trường hợp đây là lần đầu tiên mua bộ đàm và chỉ có nhu cầu dùng chúng với nhau thì người dùng có thể chọn loại băng tần nào cũng được. Tùy thuộc vào địa hình, khu vực sử dụng và để đảm bảo liên lạc xa nhất, tốt nhất bạn nên chú ý:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ở vị trí khu vực trống trải, ít vật cản nên chọn băng tần VHF.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại khu vực nhà cao tầng, nhiều công trình dân dụng, trong thành phố nên chọn tần số UHF.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cũng cần lưu ý đến khả năng được cấp phép sử dụng tần số tại vùng sử dụng bộ đàm.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Lưu ý:</strong></span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách liên lạc tối đa giữa hai máy cầm tay tại khu vực trống trải là khoảng 3km, trong thành phố không quá 2km. Những vị trí càng đông dân cư, càng nhiều công trình kiến trúc. Mật độ dân cư đông thì cự ly sẽ rút ngắn lại.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ đàm cầm tay có thể liên lạc với trung tâm của mình ở cự ly xa hơn so với cự ly giữa 2 máy cầm tay. Điều kiện là máy tại trung tâm phải có công suất lớn. Và anten đặt trên cột cao (càng cao thì liên lạc càng xa).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu muốn tăng cự li liên lạc giữa các máy với nhau, có thể chọn dùng Repeater (Bộ lặp) với anten lắp trên cao.</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><img alt="" src="/admin/webroot/upload/image/images/1534383704-bodam_02.jpg" style="width: 480px; height: 360px;" /></strong></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Lựa chọn dòng máy phù hợp</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tùy thuộc vào khả năng tài chính cũng như nhu cầu mà lựa chọn dòng máy phù hợp. Trên thị trường hiện nay có khá nhiều thương hiệu máy bộ đàm. Nổi bật hơn cả là các dòng máy đến từ thương hiệu Motorola, Icom và Kenwood. Các dòng sản phẩm khác được đánh giá là có độ bền kém hơn, chất lượng thu phát cũng không tốt bằng.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu dùng cho công trường xây dựng hay dịch vụ bảo vệ thì nên chọn loại có cấu hình trung bình. Motorola CP1100, CP1300, GP3188 loại không bàn phím với khả năng kháng nước, chống bụi, chống va đập tốt là một gợi ý.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các công ty vận tải, vận chuyển hàng hóa/hành khách…thì có thể chọn máy bộ đàm gắn xe cố định như Motorola GM3188, GM338. Nếu công ty yêu cầu đảm bảo quản lý liên lạc tại nhiều khu vực địa lý có khoảng cách xa thì phải chọn dòng máy kĩ thuật số.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Với bộ đàm dùng cho nhà hàng, khách sạn, khu công nghiệp thì nên chọn dòng máy bộ đàm cầm tay giá rẻ như Motorola MagOne A8, GP2000s, Kenwood TK-2107 hay Icom IC-F3003 đều được.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các đơn vị chuyên nghiệp mà yêu cầu sản phẩm cần phải đảm bảo an ninh để liên lạc thông suốt kể cả trong điều kiện thời tiết khắc nghiệt, môi trường phức tạp như Công an, Bộ đội, phục vụ công tác Phòng chống thiên tai, bão lũ, các công ty dầu khí…bộ đàm được lựa chọn phải là dòng chuyên nghiệp, chuyên dụng và hiệu suất cao\</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm phổ thông có giá thành tương đối rẻ, cấu hình vừa đủ đáp ứng những yêu cầu đơn giản. Vừa hài hòa về chi phí, vừa mang lại hiệu quả công việc. Trong khi đó, các dòng sản phẩm chuyên nghiệp thường có mức giá cao hơn với nhiều tính năng hơn.<br />
<br />
Có thể nói, dòng sản phẩm máy bộ đàm đến từ thương hiệu Motorola hiện đang đứng đầu về công nghệ (cả analog và digital). Nhờ vào ưu điểm là độ bền cao, khả năng chống chịu tốt cũng như cách vận hành đơn giản. Các dòng sản phẩm chuyên dụng có thể kể đến như Motorola GP3188, GP328, XiR P8200/8208, P8260/8268…</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/business-radios-2021.png" style="width: 480px; height: 238px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br />
<h2 style="box-sizing: border-box; margin-top: 0px; margin-bottom: 0.5rem; font-weight: 500; line-height: 1.2; font-size: 20px; color: rgb(68, 68, 68); font-family: Roboto, sans-serif;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; font-weight: 600;">3. Lựa chọn máy bộ đàm với những tính năng phù hợp</span></span></span></h2>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát RF: Máy cầm tay thường có công suất tối đa khoảng 5W, con số này càng cao thì cự ly liên lạc càng lớn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất âm thanh: Nếu sử dụng trong môi trường ồn ào, nhiều tiếng động. Thì nên chọn máy công suất lớn có bộ lọc âm thanh tốt.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các tính năng bảo vệ: Máy được thiết kế với kết cấu vững chắc, theo tiêu chuẩn quân đội Mỹ (MIL-STD810), chống nước, chống nổ…</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mạch mã hóa và giải mã PL/DPL, CTCSS/DTCS: Tránh được những cuộc liên lạc không cần thiết khi nhiều người dùng chung 1 kênh tần số.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng kích phát bằng giọng nói (VOX) để hoạt động khi rảnh tay</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng nhập tần số từ bàn phím của máy: Thường được trang bị ở các dòng máy phổ thông. Tuy vậy, tính năng này lại khiến người dùng vô tình làm sai tần số kênh đã đặt ra khiến máy bộ đàm không liên lạc được với máy khác.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng bảo mật thông tin: Nhiều cấp bảo mật khác nhau như Voice Scramler, AES/DES…</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
<img alt="" src="/admin/webroot/upload/image/images/MotorolaG3588.jpg" style="width: 480px; height: 480px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Chọn phụ kiện bộ đàm</strong></span></span></h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin bộ đàm</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên chọn pin dung lượng lớn, thời gian sử dụng lâu cho mỗi lần sạc. Pin cho máy bộ đàm nên từ 1000mAh – 2200mAh với thời gian hoạt động tối đa đến 19 giờ.<br />
Pin Li-Ion có dung lượng lớn và tuổi thọ pin cao có thể sạc bất cứ lúc nào mà không cần dùng hết trước khi sạc như các loại pin khác. Pin Ni-MH có dung lượng và tuổi thọ pin thấp hơn Li-Ion. Muốn pin sử dụng bền lâu thì không thể sạc nhồi mà phải dùng hết trước khi sạc lại. Trong trường hợp dùng lâu, để tránh bị hết pin bất ngờ, hãy mua thêm pin dự phòng để đảm bảo liên lạc được thông suốt.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ sạc</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu không có thời gian sạc pin lâu, hãy sử dụng bộ sạc nhanh, nhanh hơn bộ sạc chuẩn từ 3-5 giờ.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Loa – Micro và các loại tai nghe choàng đầu, áp cổ</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo liên lạc kể cả khi đeo máy thường xuyên ở thắt lưng, trên cầu vai/gắn trên cổ áo. Phù hợp với những ai thường xuyên dùng tay cho những công việc khác như bảo an, nhân viên phục vụ…<br />
Tai nghe choàng đầu và bộ áp cổ khi dùng với máy có chức năng kích phát bằng giọng nói (VOX) sẽ giúp rảnh tay hoàn toàn khi liên lạc bằng bộ đàm. Bộ áp cổ sẽ giúp âm thanh gửi đi trong hơn, không có tiếng ồn kể cả khi đang nói trong khu vực nhiều tiếng ồn.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm của mỗi hãng khác nhau đều kèm theo anten tiêu chuẩn, cho cự li liên lạc tốt nhất. Loại cải tiến kích có thước ngắn hơn giúp máy gọn và đỡ vướng víu. Anten không phù hợp có thể làm hư hỏng máy. Do vậy, nếu cần một anten mới, hãy chọn đúng mã số của loại kèm theo máy.</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/bo-dam-motorola-gp-3588-plus(1).jpg" style="width: 480px; height: 270px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ mua máy bộ đàm uy tín</span></span></h2>
<p>
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên phân phối các loại máy bộ đàm của các hãng Motorola, Kenwood, Icom, Hypersia,... lâu năm uy tín trên toàn quốc.</span></p>
<div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> <span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<br style="margin: 0px; padding: 0px;" />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" />
<br style="margin: 0px; padding: 0px;" />
Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" />
Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" />
Tel: 024.37764930<br style="margin: 0px; padding: 0px;" />
Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" />
Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" />
Email: tracdiathanhdat@gmail.com</span></span></span></span><br style="margin: 0px; padding: 0px;" />
</p>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">@ Luôn đồng hành cùng bạn!</strong><span style="margin: 0px; padding: 0px;"> </span></span></span></p>
',
'images' => '20210709160653d0336e3b94fd76fc2ef669058d11917a.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'máy bộ đàm',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-09',
'modified' => '2026-07-12',
'status' => '1',
'view' => '15419',
'slug' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '209',
'rght' => '210',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
)
)
$detailNews = array(
'Post' => array(
'id' => '494',
'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử',
'code' => null,
'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>',
'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li>
</ul>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li>
</ul>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p>
<p>
</p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p>
<p>
</p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li>
</ul>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li>
</ul>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li>
</ul>
<div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;">
<img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div>
',
'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy kinh vĩ',
'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'created' => '2017-09-11',
'modified' => '2026-07-12',
'status' => '1',
'view' => '40085',
'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '19',
'rght' => '20',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
)
$setting = array(
'id' => '1',
'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt',
'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'address_eng' => '',
'address' => '<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p>
<p>
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br />
Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p>
<div>
<p>
<strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p>
</div>
<p>
<span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p>
<p>
<span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br />
<br />
<a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p>
',
'contactinfo_eng' => '',
'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br />
<br />
1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br />
2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br />
3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br />
4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br />
5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội',
'contactinfo' => '<div dir="rtl" style="text-align: left;">
<u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div>
<div style="">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br />
Tel: (024) 3776 4930 <br />
Fax: (024) 3776 5908<br />
Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br />
Hotline: <strong>0913 051 734</strong><br />
<br />
<strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br />
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br />
</div>
<div style="">
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div>
<div style="">
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div>
<div style="">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br />
<br />
- 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br />
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div>
',
'telephone' => '01659 014592',
'hotline' => '0913 051 734',
'email' => 'tracdiathanhdat@gmail.com',
'url' => '',
'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ',
'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!',
'created' => '2012-06-05',
'modified' => '1783492910',
'youtube' => 'http://youtube.com',
'twitter' => 'https://twitter.com/',
'myspace' => 'https://myspace.com/',
'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/',
'email2' => 'duycuong7640',
'skype' => 'hothihuyen.hn',
'yahoo' => 'duycuong7640',
'yahoo1' => 'duycuong7640',
'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873',
'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>',
'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux',
'slogan_eng' => '',
'printer' => '',
'googleplus' => '',
'bando' => '<p>
<iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p>
',
'gioithieu' => '<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p>
',
'thongtincongty' => 'Sửa máy lạnh tại nhà
Sửa máy lạnh tại HCM
Sửa tủ lạnh
Bơm ga máy lạnh ',
'trogiupkh' => 'Tai nghe Iphone
Sua may tinh tai nha
Máy Ozone Z755',
'dichvuft' => 'Sửa máy lạnh
Bảo dưỡng máy lạnh
Vệ sinh máy lạnh
Lắp đặt máy lạnh',
'bb' => '',
'zing' => '',
'hotline2' => '0912 35 65 75',
'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script>
<script>
(function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){
(i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o),
m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m)
})(window,document,'script','//www.google-analytics.com/analytics.js','ga');
ga('create', 'UA-72584674-1', 'auto');
ga('send', 'pageview');
</script>
<!-- Global site tag (gtag.js) - Google Ads: 876059345 -->
<script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script>
<script>
window.dataLayer = window.dataLayer || [];
function gtag(){dataLayer.push(arguments);}
gtag('js', new Date());
gtag('config', 'AW-876059345');
</script>
<script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>',
'theh1' => 'thanhdatsurvey.JSC',
'hanoi' => '<div>
<strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div>
<div>
<strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div>
<div>
<strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div>
<div>
<strong>Email </strong>: info@ifes.vn</div>
',
'tphcm' => '<div>
<strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div>
<div>
<strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div>
<div>
<strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div>
<div>
<strong>Email </strong>: info@ifes.vn</div>
',
'tt' => '',
'pp' => 'https://www.facebook.com/ruaxetudong.net',
'tphcm_eng' => '',
'hanoi_eng' => '',
'hotline_eng' => '',
'name_eng' => '',
'chinhsach' => null,
'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>',
'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>',
'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;">
<span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br />
<br />
Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br />
</p>
<span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>',
'gt_eng' => ''
)
$tin_ft = array(
(int) 0 => array(
'Post' => array(
'id' => '588',
'name' => 'Hướng dẫn mua hàng',
'code' => null,
'alias' => 'huong-dan-mua-hang',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<p>
<span style="color:#000000;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br />
<span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> </span></span><span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="line-height: 107%;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></span></span>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="color:#000000;">Quý khách có thể mua hàng theo những cách sau:</span></span></span><br />
</p>
<p>
<span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Cách 1: </strong>Đặt hàng trực tiếp tại mục ĐẶT HÀNG (Thêm vào giỏ hàng) trên website: </span></span><span style="font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><a href="https://maytracdiasaoviet.vn/" target="_blank"><span style="color:#000000;">https://tracdiathanhdat.vn/</span></a></span></span><span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;">.</span></span></p>
<p>
<br />
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngay sau khi tiếp nhận thông tin đặt hàng, nhân viên kinh doanh công ty sẽ gọi điện cho quý khách để xác nhận đơn hàng và tiến hành giao hàng cho quý khách ngay trong ngày.</span></span></span></p>
<br />
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Cách 2: </strong>Đặt hàng trực tiếp qua số hotline của công ty <br />
<br />
– Tại trụ sở Hà Nội: <strong>0913 051 734 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br />
<br />
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">– Tại VPGD Hồ Chí Minh:<strong> 0904 925 936 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br />
<br />
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Cách 3: </strong>Quý khách mua hàng trực tiếp tại địa chỉ sau:<br />
<br />
<strong>CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></span></span></span><br />
<div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;">
<br style="margin: 0px; padding: 0px;" />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 145 Láng Hạ, Phường Láng Hạ, Hà Nội</span><br />
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div>
<div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;">
</div>
<div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;">
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rất mong được hợp tác với Quý khách hàng trên cả nước.<br />
<br />
Trân trọng!</span></span></span></div>
',
'images' => '202104071220058398ebc1b9cf669cf602eb8040be387a.jpg',
'images_multi' => '',
'pos' => '1',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Máy trắc địa chính hãng | RTK GNSS, máy toàn đạc, máy thủy bình – Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy RTK GNSS, máy toàn đạc, máy thủy bình, GPS cầm tay chính hãng. Tư vấn kỹ thuật – giao hàng toàn quốc. Trắc địa Thành Đạt – 0913 051 734',
'created' => '2021-04-07',
'modified' => '2026-07-11',
'status' => '1',
'view' => '4244',
'slug' => 'huong-dan-mua-hang',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '143',
'rght' => '144',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 1 => array(
'Post' => array(
'id' => '586',
'name' => 'Chính sách thanh toán',
'code' => null,
'alias' => 'chinh-sach-thanh-toan',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;">
<span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br />
<br />
<span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> <!--[if !supportLineBreakNewLine]--><!--[endif]--></span> </span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chúng tôi c</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">hấp nhận các hình thức thanh toán bằng tiền mặt, chuyển khoản theo đúng quy định pháp luật. </span></span></p>
<p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;">
<img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (22).png" style="width: 320px; height: 183px;" /></p>
<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;">
<span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Quý khách có thể chọn các phương thức thanh toán sau đây:</span></span><br />
<br />
<strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">I. Thanh toán trực tiếp tại cửa hàng<br />
<br />
II. Thanh toán qua hình thức chuyển khoản</span></strong><br />
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Thông tin tài khoản:</span></span></p>
<p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;">
<strong style="color: rgb(0, 0, 0); margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"><em>Chủ tài khoản</em>: CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></p>
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em style="margin: 0px; padding: 0px;"><strong>Số tài khoản</strong></em><em style="margin: 0px; padding: 0px;">: <strong>0611001648635</strong> tại Ngân hàng TMCP Ngoại thương Việt Nam, chi nhánh Ba Đình<br />
<br />
<strong>Nội dung chuyển khoản</strong>: Tên công ty - Thông tin sản phẩm đã mua – Số điện thoại người chuyển tiền</em></span></span></span><br />
<br />
<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;">
<span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Sau khi chuyển khoản hãy thông báo lại cho chúng tôi để chúng tôi kiểm tra và xác nhận lại cho Quý khách.</span></span><br />
<br />
<strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">III. Thanh toán khi nhân viên đến giao nhận hàng</span></strong></span></p>
<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66);">
<span style="color:#000000;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">Quý khách hàng thanh toán trực tiếp bằng tiền mặt cho nhân viên giao hàng của chúng tôi ngay khi kiểm tra và nhận hàng.<br />
<br />
Mọi phản hồi và thắc mắc về việc thanh toán, Quý khách liên hệ <strong>0942 288 388</strong> để được tư vấn.</span></font><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span></span></p>
',
'images' => '20210407122232bf3e6d52a68ca60f97fc6048b14e4acc.jpg',
'images_multi' => '',
'pos' => '2',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-04-07',
'modified' => '2026-07-12',
'status' => '1',
'view' => '3881',
'slug' => 'chinh-sach-thanh-toan',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '139',
'rght' => '140',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 2 => array(
'Post' => array(
'id' => '587',
'name' => 'Chính sách vận chuyển',
'code' => null,
'alias' => 'chinh-sach-van-chuyen',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<div>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><span style="font-family:verdana,geneva,sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></strong><br />
<br />
Chúng tôi hỗ trợ giao hàng toàn quốc cho Quý khách mua hàng tại hệ thống cửa hàng của chúng tôi.</span></span><br />
</div>
<div>
<p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">Sau khi nhận được thông tin đặt hàng chúng tôi sẽ lập tức xử lý đơn hàng và phản hồi lại thông tin cho khách hàng về việc thanh toán và giao nhận.<br />
<br />
<strong>> Thời gian giao hàng </strong><br />
<br />
- Trong vòng 24 giờ nếu địa điểm giao hàng <b style="color: rgb(74, 74, 74); box-sizing: border-box;">≤ 20 km</b> tính từ cửa hàng của chúng tôi.</span></span></p>
<p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Trong vòng 1-2 ngày nếu địa điểm giao hàng nằm trong phạm vi <b style="box-sizing: border-box">50 - 100 km</b> </span></span><span style="font-family: Arial, sans-serif;"><o:p></o:p></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">tính từ cửa hàng của chúng tôi.<br />
<br />
- Trong vòng 3-5 ngày</span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> nếu địa điểm giao hàng từ <strong>20</strong></span><b style="font-family: tahoma, geneva, sans-serif; font-size: 14px; box-sizing: border-box;">0 km</b><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> trở lên </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">tính từ cửa hàng của chúng tôi.</span></p>
<p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;">
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trước khi vận chuyển, bộ phận giao nhận sẽ liên lạc với Quý khách hàng để xác nhận khoảng thời gian và địa điểm giao hàng cụ thể.</span></p>
<p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;">
<strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">> Phí vận chuyển</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> sẽ được tính theo từng giá trị đơn hàng và được thoả thuận giữa hai bên ngay trước khi giao hàng. </span></p>
<p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px;">Mọi thắc mắc liên quan đến việc giao hàng, Quý khách hàng liên hệ số điện thoại <strong>0942 288 388</strong> để được giải đáp và giải quyết kịp thời.<br />
<br />
Trân trọng!</span></span></span></p>
</div>
',
'images' => '20210407122135505ddef64809ce7ee5f9db7cfdfd3e2e.jpg',
'images_multi' => '',
'pos' => '3',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-04-07',
'modified' => '2026-07-12',
'status' => '1',
'view' => '3923',
'slug' => 'chinh-sach-van-chuyen',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '141',
'rght' => '142',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 3 => array(
'Post' => array(
'id' => '585',
'name' => 'Chính sách đổi trả',
'code' => null,
'alias' => 'chinh-sach-doi-tra',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Chúng tôi hỗ trợ đổi trả sản phẩm trong vòng 07 ngày nếu lỗi phát sinh do nhà sản xuất.<br />
<br />
Trong thời gian đổi trả, Công ty CP Công nghệ và Thương mại Thành Đạt sẽ hỗ trợ cung cấp máy móc thay thế kịp thời để công việc khảo sát, đo đạc của Quý khách không bị gián đoạn. Chi phí vận chuyển cho việc đổi trả do hai bên tự thoả thuận.</span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" />
<br />
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">> Điều kiện đổi trả: </span></span></strong></span><br />
<ul>
<li style="box-sizing: border-box;">
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm phải còn nguyên tem mác.</span></span></span></li>
<li style="box-sizing: border-box;">
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm bị lỗi do nhà sản xuất.</span></span></span></li>
<li style="box-sizing: border-box;">
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm không đúng như đơn đặt hàng.</span></span></span></li>
<li style="box-sizing: border-box;">
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lần đổi trả cho 1 sản phẩm là 1 lần</span></span></span></li>
</ul>
<br />
<div style="text-align: start;">
<span style="color:#000000;"><strong><span style="text-align: justify;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">> </span></font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Việc đổi trả sẽ không được chấp nhận nếu:</span> <span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"> </span></span></strong></span></div>
<ul>
<li>
<span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Trong quá trình sử dụng sản phẩm Quý khách không tuân thủ các chỉ dẫn của Nhà sản xuất.</span></span></li>
<li>
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="text-align: justify;">S</span>ản phẩm bị trầy xước, không nguyên vẹn</span></span></span></li>
</ul>
<br />
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, chúng tôi cũng hỗ trợ đổi trả sản phẩm vì lý do chủ quan của Quý khách hàng ( muốn đổi sang sản phẩm cùng chủng loại nhưng khác về màu sắc, hãng sản xuất hay thông số kỹ thuật). Chi phí cho việc đổi trả này do Quý khách hàng chịu.</span></span><br />
<br />
<span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"><img alt="" src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/lien-he.jpg" style="margin: 0px; padding: 8px 0px; height: 36px; max-width: 100%; vertical-align: middle; border: 0px; opacity: 1; font-size: 13px; width: 38px;" /><span style="margin: 0px; padding: 0px; font-size: 13px;"> </span></strong></span></span><span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"> </strong></span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Liên hệ hotline <strong>0913 051 734</strong> để được tư vấn đổi trả theo đúng qui định.</span></span>',
'images' => '202104071223177d9b7f6e319f9fa90078c7c61ed9bd19.jpg',
'images_multi' => '',
'pos' => '4',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-04-07',
'modified' => '2026-07-11',
'status' => '1',
'view' => '3915',
'slug' => 'chinh-sach-doi-tra',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '137',
'rght' => '138',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 4 => array(
'Post' => array(
'id' => '583',
'name' => 'Chính sách bảo hành',
'code' => null,
'alias' => 'chinh-sach-bao-hanh',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<div>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="color: rgb(66, 66, 66); text-align: justify;">Tất cả các sản phẩm mua tại hệ thống cửa hàng của chúng tôi đều được bảo hành chính hãng theo quy định của nhà sản xuất. </span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" />
<br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" />
<span style="color: rgb(66, 66, 66); text-align: justify;">Chúng tôi hỗ trợ kỹ thuật 24/7 qua số hotline <strong>0913 051 734</strong> trong suốt quá trình Quý khách sử dụng sản phẩm.</span></span></span></div>
<div>
<br />
<strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">1. Sản phẩm được bảo hành miễn phí: </span></span></strong><br />
<br />
<ul>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm sẽ được bảo hành miễn phí nếu sản phẩm đó còn thời hạn bảo hành (được tính kể từ ngày mua hàng).</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Thời hạn bảo hành được ghi trên Tem Bảo Hành và theo quy định của từng Nhà sản xuất đối với tất cả các sự cố về mặt kỹ thuật.</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Có Tem bảo hành trên sản phẩm.</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi sản phẩm có sự cố kĩ thuật chúng tôi sẽ trực tiếp khắc phục sự cố tại cửa hàng hoặc thay mặt khách hàng mang sản phẩm tới Trung Tâm Bảo Hành của hãng.</span></span></li>
</ul>
<br />
<strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">2. Những trường hợp không được bảo hành (sửa chữa có tính phí): </span></span></strong><br />
<br />
<ul>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm đã quá thời hạn bảo hành hoặc không có Tem bảo hành trên máy.</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hư hỏng do tác động cơ học làm rơi, vỡ, va đập, trầy xước, móp méo, ẩm ướt, hoen rỉ, chảy nước hoặc do hỏa hoạn, thiên tai gây nên.</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hỏng do sử dụng không đúng cách, sử dụng sai điện áp quy định.</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Tự ý tháo dỡ, sửa chữa sản phẩm</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span><br />
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"> </span></span></div>
',
'images' => '20210407123801c4049edabae0c54e2347c82e21413ec3.jpg',
'images_multi' => '',
'pos' => '5',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-04-07',
'modified' => '2026-07-11',
'status' => '1',
'view' => '3646',
'slug' => 'chinh-sach-bao-hanh',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '133',
'rght' => '134',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 5 => array(
'Post' => array(
'id' => '584',
'name' => 'Chính sách bảo mật thông tin',
'code' => null,
'alias' => 'chinh-sach-bao-mat-thong-tin',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<div>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">1. Mục đích thu nhập thông tin cá nhân</span></span></span></span></h2>
<p style="text-align: justify;">
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51);">Thông tin cá nhân mà chúng tôi thu thập bao gồm: họ tên, địa chỉ giao hàng, địa chỉ email, số điện thoại cố định, số điện thoại di động, cookies.</span></p>
<ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Đối với các giao dịch thanh toán qua cổng thanh toán trực tuyến, Chúng tôi không lưu trữ thông tin số tài khoản, số thẻ ngân hàng của khách hàng, những thông tin này sẽ được cổng thanh toán lưu trữ để phục vụ việc đối soát giao dịch.</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân khách hàng sẽ được sử dụng cho một hoặc tất cả các mục đích sau đây:</span></span></span></span>
<ul style="margin: 0px; padding: 0px 0px 0px 15px;">
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Giao hàng cho quý khách đã mua hàng</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông báo về việc giao hàng và hỗ trợ khách hàng</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Cung cấp thông tin liên quan đến sản phẩm</span></span></span></span></li>
</ul>
</li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoài ra, chúng tôi sẽ sử dụng thông tin của quý khách cung cấp để hỗ trợ quản lý tài khoản khách hàng (nếu có); xác nhận và thực hiện các giao dịch tài chính liên quan đến các khoản thanh toán trực tuyến của quý khách;</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi không được phép thu nhập thông tin nếu khách hàng không tự nguyện, cũng không sử dụng phương thức thu thập thông tin khách hàng bằng các hình thức bất hợp pháp.</span></span></span></span></li>
</ul>
<p style="text-align: justify;">
</p>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">2. Phạm vi sử dụng thông tin</span></span></span></span></h2>
<br />
<ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân thu thập được sẽ chỉ được sử dụng trong nội bộ công ty.</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể chia sẻ tên và địa chỉ của quý khách cho dịch vụ chuyển phát nhanh có uy tín để giao hàng cho quý khách theo cam kết.</span></span></span></span></li>
</ul>
<p style="text-align: justify;">
</p>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">3. Thời gian lưu trữ thông tin</span></span></span></span></h2>
<p style="text-align: justify;">
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">Thông tin khách hàng được lưu trữ nội bộ cho đến khi có yêu cầu xóa thông tin từ phía khách hàng.</span></p>
<div style="margin: 0px; padding: 0px; line-height: 20px;">
<div>
<div style="text-align: justify;">
</div>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Những người hoặc tổ chức có thể được tiếp cận với thông tin </span></span></h2>
<br />
<div style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng được tiếp cận với thông tin cá nhân của khách hàng thuộc một trong những trường hợp sau:</span></span><br />
</div>
<div style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Nhân viên của Công ty Cổ phần Công nghệ và thương mại Thành Đạt</span></span></div>
<div style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Các đối tác có ký hợp đồng thực hiện 1 phần dịch vụ của Công ty. Các đối tác này sẽ nhận được những thông tin theo thỏa thuận hợp đồng (có thể 1 phần hoặc toàn bộ thông tin tuy theo điều khoản hợp đồng) để tiến hành hỗ trợ người dùng sử dụng dịch vụ do Công ty cung cấp.</span></span></div>
<div style="text-align: justify;">
</div>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ của đơn vị thu thập và quản lý thông tin</span></span></h2>
<div style="text-align: justify;">
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(bao gồm cách thức liên lạc để người tiêu dùng có thể hỏi về hoạt động thu thập, xử lý thông tin liên quan đến cá nhân mình)</span></span></em></div>
<div style="text-align: justify;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ của đơn vị thu thập và quản lý thông tin:</span></span><br />
</div>
<div style="text-align: justify;">
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Công ty Cổ phần Công nghệ và thương mại Thành Đạt </span></span></strong></div>
<div style="text-align: justify;">
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Địa chỉ: số 157 phố Đặng Văn Ngữ, P. Phương Liên, Q. Đống Đa, Tp. Hà Nội</span></span></strong></div>
<div style="text-align: justify;">
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Điện thoại: 0243 7764930</span></span></strong></div>
<div style="text-align: justify;">
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Email: tracdiathanhdat@gmail.com<span style="white-space: pre;"> </span></span></span></strong></div>
</div>
</div>
<p style="text-align: justify;">
<br />
<span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Người dùng có thể gọi điện tới tổng đài hỗ trợ và chăm sóc khách hàng </span><strong style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify; margin: 0px; padding: 0px;">0949 322 456</strong><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để điều chỉnh hoặc xóa đi dữ liệu cá nhân của mình.</span><br />
</p>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">6. Cam kết bảo mật thông tin cá nhân khách hàng</span></span></span></span></h2>
<br />
<ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Không bán, chia sẻ hay trao đổi thông tin cá nhân của khách hàng thu thập trên trang web cho một bên thứ ba nào khác.</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoại trừ các trường hợp về sử dụng thông tin cá nhân như đã nêu trong chính sách này,chúng tôi cam kết không tiết lộ thông tin cá nhân của bạn ra ngoài. Trong một số trường hợp, chúng tôi có thể thuê một đơn vị độc lập để tiến hành các dự án nghiên cứu thị trường và khi đó thông tin của bạn sẽ được cung cấp cho đơn vị này để tiến hành dự án. Bên thứ ba này sẽ bị ràng buộc bởi một thỏa thuận về bảo mật mà theo đó họ chỉ được phép sử dụng những thông tin được cung cấp cho mục đích hoàn thành dự án.</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể tiết lộ hoặc cung cấp thông tin cá nhân của bạn trong các trường hợp thật sự cần thiết như sau: (a) khi có yêu cầu của các cơ quan pháp luật; (b) trong trường hợp mà chúng tôi tin rằng điều đó sẽ giúp chúng tôi bảo vệ quyền lợi chính đáng của mình trước pháp luật.</span></span></span></span></li>
</ul>
<p style="text-align: justify;">
</p>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">7. Thay đổi về chính sách</span></span></span></span></h2>
<p style="text-align: justify;">
<br style="margin: 0px; padding: 0px;" />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Nội dung của “Chính sách bảo mật” này có thể thay đổi để phù hợp với các nhu cầu của Công Ty CP Công nghệ và Thương Mại Thành Đạt cũng như nhu cầu và sự phản hồi từ khách hàng (nếu có). </span></span></span></span></p>
</div>
<div style="text-align: justify;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi hiểu rằng quyền lợi của bạn trong việc bảo vệ thông tin cá nhân cũng chính là trách nhiệm của chúng tôi nên trong bất kỳ trường hợp có thắc mắc, góp ý nào liên quan đến chính sách bảo mật, việc thông tin cá nhân bị sử dụng sai mục đích vui lòng liên hệ qua số điện thoại <strong>0949 322 456</strong> hoặc gửi phản hồi về địa chỉ email: <em><strong>tracdiathanhdat@gmail.com.</strong></em><br />
<br />
Trân trọng!</span></span></div>
',
'images' => '202104071236589b665b2accf17da9077cea4c5dad8e94.jpg',
'images_multi' => '',
'pos' => '6',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-04-07',
'modified' => '2026-07-12',
'status' => '1',
'view' => '3920',
'slug' => 'chinh-sach-bao-mat-thong-tin',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '135',
'rght' => '136',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
)
)
$slideshow = array(
(int) 0 => array(
'Slideshow' => array(
'id' => '1158',
'name' => '',
'images' => '202607021457295d6b626c7966fea8ed15b90188f75e84.png',
'created' => '2026-07-02 14:57:29',
'modified' => '2026-07-02 14:57:29',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 1 => array(
'Slideshow' => array(
'id' => '1157',
'name' => '',
'images' => '20260630144106967d7220891508e0bc589157b72a4a6f.png',
'created' => '2026-06-30 14:41:06',
'modified' => '2026-06-30 14:41:06',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 2 => array(
'Slideshow' => array(
'id' => '1156',
'name' => '',
'images' => '20260627100900c4525d4b0ad85bb7ed6e5f31fbe008ce.png',
'created' => '2026-06-27 10:09:00',
'modified' => '2026-06-27 10:09:00',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 3 => array(
'Slideshow' => array(
'id' => '1153',
'name' => '',
'images' => '2026060910315463c4488ef0eebcd97a80c7be838ec857.png',
'created' => '2026-06-09 10:31:54',
'modified' => '2026-06-09 10:31:54',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 4 => array(
'Slideshow' => array(
'id' => '1151',
'name' => '',
'images' => '20260505105747cef035cfde3d3e4fc486dcc70906dab9.png',
'created' => '2026-05-05 10:57:47',
'modified' => '2026-05-05 10:57:47',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 5 => array(
'Slideshow' => array(
'id' => '1147',
'name' => '',
'images' => '20260504151401463305739b212edcd50d4df28ea21663.png',
'created' => '2026-05-04 15:14:01',
'modified' => '2026-05-04 15:14:01',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 6 => array(
'Slideshow' => array(
'id' => '1111',
'name' => '',
'images' => '2025091214412921cbc3cbc42d3d64fe4364ad8b7a9b7e.png',
'created' => '2025-09-12 14:41:29',
'modified' => '2025-09-12 14:41:29',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 7 => array(
'Slideshow' => array(
'id' => '1099',
'name' => '',
'images' => '20250707100715baf5ecd84c6a8766519b98f66eec1511.png',
'created' => '2025-07-07 10:07:15',
'modified' => '2025-07-07 10:07:15',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 8 => array(
'Slideshow' => array(
'id' => '1096',
'name' => '',
'images' => '202504251616158fbd912c821051db2e9e1ebe215c4da4.png',
'created' => '2025-04-25 16:16:15',
'modified' => '2025-04-25 16:16:15',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 9 => array(
'Slideshow' => array(
'id' => '1055',
'name' => '',
'images' => '202502071107533894de97e081b06e5749a83e6bed2399.png',
'created' => '2025-02-07 11:07:53',
'modified' => '2025-02-07 11:07:53',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 10 => array(
'Slideshow' => array(
'id' => '1008',
'name' => '',
'images' => '20240822084848c3089726a8fff539a5f1adcaaca9cd73.png',
'created' => '2024-08-22 08:48:48',
'modified' => '2024-08-22 08:48:48',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 11 => array(
'Slideshow' => array(
'id' => '961',
'name' => '',
'images' => '202403121029063cfd7328162ff668a881f7e275a1a01d.png',
'created' => '2024-03-12 10:29:08',
'modified' => '2024-03-12 10:29:08',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 12 => array(
'Slideshow' => array(
'id' => '850',
'name' => '',
'images' => '20230605160932d4a880ffcab96141d7a3538bf17255de.png',
'created' => '2023-06-05 16:09:33',
'modified' => '2023-12-25 09:27:46',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 13 => array(
'Slideshow' => array(
'id' => '817',
'name' => '',
'images' => '20230306160629b7490cbbbd5cfd081d8ec1930914a677.png',
'created' => '2023-03-06 16:06:29',
'modified' => '2025-12-23 09:03:28',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 14 => array(
'Slideshow' => array(
'id' => '617',
'name' => '',
'images' => '20220713143712ec1e28dc996e7d39d7535a730ead176e.png',
'created' => '2022-07-13 14:37:12',
'modified' => '2024-12-02 16:11:15',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
)
)
$adv_khuyenmai = array(
'Advertisement' => array(
'id' => '104',
'name' => null,
'link' => '',
'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png',
'display' => '5',
'created' => '2024-01-16',
'modified' => '2024-06-21',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '121',
'rght' => '122'
)
)
$doitac = array(
(int) 0 => array(
'Advertisement' => array(
'id' => '36',
'name' => null,
'link' => 'http://tracdiathanhdat.vn/bosch',
'images' => '20151223081939be7f9ca66f2fb4e760fb991d89d74002.png',
'display' => '3',
'created' => '2015-12-23',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '33',
'rght' => '34'
)
),
(int) 1 => array(
'Advertisement' => array(
'id' => '33',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/pentax',
'images' => '20151216094854d7903c4f5ae6da9780bc88cbb048d417.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '27',
'rght' => '28'
)
),
(int) 2 => array(
'Advertisement' => array(
'id' => '16',
'name' => null,
'link' => 'http://tracdiathanhdat.vn/topcon',
'images' => '2015121609180430293457191c29e0d0d7a715d26041bd.png',
'display' => '3',
'created' => '2015-12-10',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '7',
'rght' => '8'
)
),
(int) 3 => array(
'Advertisement' => array(
'id' => '27',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/trimple',
'images' => '2015121609470060450f77189189cce8edb27ef59c46d2.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '15',
'rght' => '16'
)
),
(int) 4 => array(
'Advertisement' => array(
'id' => '28',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '20151216094709d0c1b1d5ffcc17a598904261de69c485.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '17',
'rght' => '18'
)
),
(int) 5 => array(
'Advertisement' => array(
'id' => '29',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/kenwood',
'images' => '201512160947288286f4b931bdbc0e64dfd484fc6c12e5.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '19',
'rght' => '20'
)
),
(int) 6 => array(
'Advertisement' => array(
'id' => '30',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/nikon',
'images' => '202210171542300b1b7918f461a4dd8d877236543412d8.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2022-10-17',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '21',
'rght' => '22'
)
),
(int) 7 => array(
'Advertisement' => array(
'id' => '34',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/sincon',
'images' => '20151216095020f699fb43b225af9cb76ffe022e057faf.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '29',
'rght' => '30'
)
),
(int) 8 => array(
'Advertisement' => array(
'id' => '31',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/garmin',
'images' => '201512160948147d3b76212a8ebdd03d45fc49a95a9868.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '23',
'rght' => '24'
)
),
(int) 9 => array(
'Advertisement' => array(
'id' => '26',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/leica',
'images' => '20151216094654c3a83e015935188821aa9ee65e6b322f.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '13',
'rght' => '14'
)
),
(int) 10 => array(
'Advertisement' => array(
'id' => '25',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/sokkia',
'images' => '2015121609464772166f729226cebe52ae986c2699c3a1.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '11',
'rght' => '12'
)
),
(int) 11 => array(
'Advertisement' => array(
'id' => '24',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/foif',
'images' => '2015121609482733afba0b93b9383e6ea26a08124e8a76.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '9',
'rght' => '10'
)
),
(int) 12 => array(
'Advertisement' => array(
'id' => '54',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '20210424094203a24f4d5a812351010a6355d888b944ec.png',
'display' => '3',
'created' => '2021-04-24',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '57',
'rght' => '58'
)
),
(int) 13 => array(
'Advertisement' => array(
'id' => '55',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '2021042409421996a13aed03c03b49b7d965db5dbcfdd6.png',
'display' => '3',
'created' => '2021-04-24',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '59',
'rght' => '60'
)
),
(int) 14 => array(
'Advertisement' => array(
'id' => '56',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/motorola',
'images' => '20220805103835e45b76131731a737df5e8dec49916375.jpg',
'display' => '3',
'created' => '2021-04-24',
'modified' => '2022-08-05',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '61',
'rght' => '62'
)
),
(int) 15 => array(
'Advertisement' => array(
'id' => '57',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/yamayo',
'images' => '20250304144532ee8e939d0c9e884e1a50ad352b272730.jpg',
'display' => '3',
'created' => '2021-04-24',
'modified' => '2025-03-04',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '63',
'rght' => '64'
)
),
(int) 16 => array(
'Advertisement' => array(
'id' => '58',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '20210424100013ce6e6d048914eccdc312d53e64e566b7.jpg',
'display' => '3',
'created' => '2021-04-24',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '65',
'rght' => '66'
)
),
(int) 17 => array(
'Advertisement' => array(
'id' => '59',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/geomax',
'images' => '2021051416090922e7bec3a6dfe8041780aa125f5f4932.jpg',
'display' => '3',
'created' => '2021-05-14',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '67',
'rght' => '68'
)
),
(int) 18 => array(
'Advertisement' => array(
'id' => '60',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/south',
'images' => '20210623100351b1da5960a28a9deb6af4e028880d625b.png',
'display' => '3',
'created' => '2021-06-23',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '69',
'rght' => '70'
)
),
(int) 19 => array(
'Advertisement' => array(
'id' => '62',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/e-survey',
'images' => '20211124221103bda9f65e28426fc1f93c4f5f223cd1bc.png',
'display' => '3',
'created' => '2021-06-23',
'modified' => '2021-11-24',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '71',
'rght' => '72'
)
),
(int) 20 => array(
'Advertisement' => array(
'id' => '68',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hi-target',
'images' => '2021112422134905fc59de564b69bfad9ca0b5f7204ffa.png',
'display' => '3',
'created' => '2021-08-05',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '73',
'rght' => '74'
)
),
(int) 21 => array(
'Advertisement' => array(
'id' => '73',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/dji',
'images' => '2021102921504774fd5e8eec5eed69455accd89f7429e5.png',
'display' => '3',
'created' => '2021-10-29',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '83',
'rght' => '84'
)
),
(int) 22 => array(
'Advertisement' => array(
'id' => '74',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/spectra-geospatial-spectra-precision',
'images' => '202110292149162a2a919ea2a12b8255429f33eb51a1a8.png',
'display' => '3',
'created' => '2021-10-29',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '85',
'rght' => '86'
)
),
(int) 23 => array(
'Advertisement' => array(
'id' => '75',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/efix',
'images' => '202207131224432d602a710c7f1a152566aec421d281d7.png',
'display' => '3',
'created' => '2022-07-13',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '87',
'rght' => '88'
)
),
(int) 24 => array(
'Advertisement' => array(
'id' => '76',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/chcnav',
'images' => '20220714162725db2138b3dcabb86eedc65c4ba1f6ccce.jpg',
'display' => '3',
'created' => '2022-07-14',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '89',
'rght' => '90'
)
),
(int) 25 => array(
'Advertisement' => array(
'id' => '78',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '202208051039345c0c28b21fe05a0c9d4f65b176fe7063.jpg',
'display' => '3',
'created' => '2022-08-05',
'modified' => '2022-08-05',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '93',
'rght' => '94'
)
),
(int) 26 => array(
'Advertisement' => array(
'id' => '79',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '202210171541561896d0eb31d272d3d99a9a8c0d3582fa.png',
'display' => '3',
'created' => '2022-10-17',
'modified' => '2022-10-17',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '95',
'rght' => '96'
)
),
(int) 27 => array(
'Advertisement' => array(
'id' => '100',
'name' => null,
'link' => '',
'images' => '20230515143931e088ce1b8d5b9bcf57916a733e5ff5e3.jpg',
'display' => '3',
'created' => '2023-05-15',
'modified' => '2023-05-15',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '117',
'rght' => '118'
)
),
(int) 28 => array(
'Advertisement' => array(
'id' => '107',
'name' => null,
'link' => 'https://www.tracdiathanhdat.vn/bua-dung-cho-khao-sat-dia-chat-estwing-e3-22p.html',
'images' => '20240130151328303b311c40a2276c91bf7e4f0aa460ce.png',
'display' => '3',
'created' => '2024-01-30',
'modified' => '2024-01-30',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '125',
'rght' => '126'
)
),
(int) 29 => array(
'Advertisement' => array(
'id' => '108',
'name' => null,
'link' => 'https://www.tracdiathanhdat.vn/ong-nhom-celestron-nature-dx-10-42.html',
'images' => '20240130151701574ebc151c3252c2eb93d6504efdc5ab.jpg',
'display' => '3',
'created' => '2024-01-30',
'modified' => '2024-01-30',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '127',
'rght' => '128'
)
),
(int) 30 => array(
'Advertisement' => array(
'id' => '114',
'name' => null,
'link' => '',
'images' => '20250917151944a9ff8314bd4af3bf87c9037dceceff53.png',
'display' => '3',
'created' => '2025-09-17',
'modified' => '2025-09-17',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '131',
'rght' => '132'
)
)
)
$chayphai = array(
'Advertisement' => array(
'id' => '50',
'name' => null,
'link' => '',
'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg',
'display' => '2',
'created' => '2021-01-20',
'modified' => '2021-01-20',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '53',
'rght' => '54'
)
)
$chaytrai = array(
'Advertisement' => array(
'id' => '49',
'name' => null,
'link' => '',
'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg',
'display' => '1',
'created' => '2021-01-20',
'modified' => '2021-01-20',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '51',
'rght' => '52'
)
)
$chiasekinhnghiem = array()
$list_menu_footer = array()
$danhmuc_left_parent_sphot = array(
(int) 0 => array(
'Catproduct' => array(
'id' => '2',
'name' => 'Sản phẩm',
'slug' => 'san-pham-1'
)
)
)
$danhmuc_left_parent = array(
(int) 0 => array(
'Catproduct' => array(
'id' => '2',
'name' => 'Sản phẩm',
'slug' => 'san-pham-1'
)
)
)
$danhmuc = array(
(int) 0 => array(
'Catproduct' => array(
'id' => '1',
'name' => 'Trang chủ',
'slug' => 'trang-chu'
)
),
(int) 1 => array(
'Catproduct' => array(
'id' => '3',
'name' => 'Giới thiệu ',
'slug' => 'gioi-thieu'
)
),
(int) 2 => array(
'Catproduct' => array(
'id' => '2',
'name' => 'Sản phẩm',
'slug' => 'san-pham-1'
)
),
(int) 3 => array(
'Catproduct' => array(
'id' => '5',
'name' => 'Phần mềm - HDSD ',
'slug' => 'phan-mem-hdsd'
)
),
(int) 4 => array(
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'slug' => 'kien-thuc-ung-dung'
)
),
(int) 5 => array(
'Catproduct' => array(
'id' => '6',
'name' => 'Liên hệ',
'slug' => 'lien-he'
)
)
)
$support = array(
(int) 0 => array(
'Support' => array(
'id' => '13',
'name' => 'Co so Ha noi',
'phone' => '098 987 678',
'yahoo' => 'duycuong7640',
'skype' => 'duycuong7640',
'pos' => '0',
'created' => '2013-09-13',
'modified' => '2015-05-05',
'status' => '1',
'yahoo1' => 'duycuong7640',
'skype1' => '',
'hotline' => '0987 654 999',
'email' => '',
'name1' => ''
)
),
(int) 1 => array(
'Support' => array(
'id' => '16',
'name' => 'Co so TP.HCM',
'phone' => '3252 436 432',
'yahoo' => 'duycuong7640',
'skype' => 'tuvantubep',
'pos' => '0',
'created' => '2014-01-15',
'modified' => '2015-05-05',
'status' => '1',
'yahoo1' => 'duycuong7640',
'skype1' => '',
'hotline' => '0987 654 999',
'email' => '',
'name1' => ''
)
)
)
$content_for_layout = '<style>
@font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal}
#ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative}
#ez-toc-container.selected{
width: 10px;
}
#ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"}
.toc_cap2{
padding-left: 25px!important;
}
.toc_cap3{
padding-left: 50px!important;
}
.ct-tt table.download{
width: 100%!important;
}
.ct-tt a.download{
background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase;
}
.ct-tt table.dangkythamgia{
width: 100%!important;
}
.ct-tt a.dangkythamgia{
padding:10px 20px; background-color: #00ffff;
}
.ct-tt div{max-width: 100%;}
</style>
<div class="bg-cat-danhmuc">
<div class="cat-title-danhmuc">
<a href="" title="">
<h1></h1>
</a>
</div>
</div>
<div class="box-content-detail">
<div class="clear-content"></div><div class="clear-content"></div>
<div class="col-product">
<div class="box-new-content">
<div class="box-new-detail">
<div class="time-date">
12:00:00
<span>11/09/2017</span>
</div><!--end time-date--><div class="clear-content"></div>
<div class="box-like-share">
<div class="like1">
<div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div>
</div>
</div><!--end box-like-share--><div class="clear-content"></div>
<div class="ct-tt">
<style>
#row-2097407503{display: flex;flex-wrap: wrap;}
#row-2097407503 p{
margin-bottom: 20px;
}
.large-4 {
flex-basis: 33.3333333333%;text-align: center;
max-width: 33.3333333333%;margin-bottom: 30px;
}
.large-4 a{
color: #fff;text-transform: uppercase;font-weight:bold;
}
.large-4 .col-inner{padding:0 15px;}
.expand {
display: block;
max-width: 100%!important;
padding-left: 0!important;
padding-right: 0!important;
width: 100%!important;padding:10px;
}
.button.success {
background-color: #4a90e2;
}
.box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover {
transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%);
}
.box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner {
transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s;
}
.box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover {
box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%);
}
.button span {
font-weight: 400;
}
.is-shade:after {
box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%);
}
</style>
<div class="" id="row-2097407503">
<p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p>
<div id="col-680915017" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>Gọi Điện</span>
</a>
</div>
</div>
<div id="col-569433728" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>Nhắn Tin</span>
</a>
</div>
</div>
<div id="col-272138532" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>chat zalo</span>
</a>
</div>
</div>
</div>
<div class="clear-main"></div>
</div><!--end ct-tt-->
<!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>-->
<div class="clear-content"></div><div class="clear-content"></div>
</div><!--end box-new-detail-->
<div class="bar-new-detail">
<label>Private same category</label>
<div class="clear-main"></div>
<ul>
<li>
<a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title="">
<h3> <span>(18-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title="">
<h3> <span>(06-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title="">
<h3> <span>(05-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title="">
<h3> <span>(30-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title="">
<h3> <span>(29-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title="">
<h3> <span>(28-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title="">
<h3> <span>(25-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title="">
<h3> <span>(14-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title="">
<h3> <span>(12-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title="">
<h3> <span>(09-07-2021)</span></h3>
</a>
</li>
</ul>
<div class="clear-main"></div>
</div><!--end bar-new-detail-->
<div class="clear-main"></div>
<div class="pagination">
<span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div>
<div class="clear-main"></div>
</div><!--end box-ctbar-->
</div>
</div>
<script type="text/javascript">
var ToC =
"<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" +
// "<div class='tile_mucluc'><span>Mục lục:</span></div>" +
"<ul class='ez-toc-list ez-toc-list-level-1'>";
var newLine, el, title, link ,id;
$(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() {
el = $(this);
title = el.text();
id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,"");
$(this).attr('id', id);
if($(this).is("h2")){
newLine =
"<li>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
if($(this).is("h3")){
newLine =
"<li class='toc_cap2'>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
if($(this).is("h4")){
newLine =
"<li class='toc_cap3'>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
ToC += newLine;
});
ToC +=
"</ul>" +
"</nav></div><div style='clear:both;'></div>";
$(".ct-tt").prepend(ToC);
$( ".ez-toc-glyphicon" ).toggle(
function() {
$('#ez-toc-container').addClass( "selected" );
$('.menu_danhmuc').hide();
}, function() {
$('#ez-toc-container').removeClass( "selected" );
$('.menu_danhmuc').show();
}
);
</script>
'
$scripts_for_layout = ''
$count = (int) 0
$price = (int) 0
$sl = (int) 0
$cap1 = array(
'Catproduct' => array(
'id' => '3',
'name' => 'Giới thiệu ',
'slug' => 'gioi-thieu'
)
)
$dm_c2 = array(
(int) 0 => array(
'Catproduct' => array(
'id' => '44',
'name' => 'Sửa chữa - Kiểm nghiệm',
'parent_id' => '3',
'alias' => 'sua-chua-kiem-nghiem',
'images' => '',
'lft' => '40',
'rght' => '41',
'pos' => '1',
'status' => '1',
'title_seo' => '',
'meta_key' => '',
'meta_des' => '',
'created' => '2016-01-21',
'modified' => '2016-01-21',
'slug' => 'sua-chua-kiem-nghiem',
'cate' => '4',
'link' => 'gioi-thieu',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 1 => array(
'Catproduct' => array(
'id' => '45',
'name' => 'Dịch vụ thuê máy',
'parent_id' => '3',
'alias' => 'dich-vu-thue-may',
'images' => '',
'lft' => '42',
'rght' => '43',
'pos' => '2',
'status' => '1',
'title_seo' => '',
'meta_key' => '',
'meta_des' => '',
'created' => '2016-01-21',
'modified' => '2016-01-21',
'slug' => 'dich-vu-thue-may',
'cate' => '4',
'link' => 'gioi-thieu',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
)
)include - APP/View/Elements/menu.ctp, line 55 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::element() - CORE/Cake/View/View.php, line 424 include - APP/View/Layouts/home.ctp, line 169 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::renderLayout() - CORE/Cake/View/View.php, line 539 View::render() - CORE/Cake/View/View.php, line 483 Controller::render() - CORE/Cake/Controller/Controller.php, line 957 ProductController::chitiet() - APP/Controller/ProductController.php, line 135 ReflectionMethod::invokeArgs() - [internal], line ?? Controller::invokeAction() - CORE/Cake/Controller/Controller.php, line 485 Dispatcher::_invoke() - CORE/Cake/Routing/Dispatcher.php, line 186 Dispatcher::dispatch() - CORE/Cake/Routing/Dispatcher.php, line 161 [main] - APP/webroot/index.php, line 92
Notice (8): Undefined index: name_eng [APP/View/Elements/menu.ctp, line 56]Code Context<div class="accordion-heading"><a class="accordion-toggle" <?php if(!empty($dm_c2)){?>data-toggle="collapse" data-parent="#accordion2" href="#collapse<?php echo $cap1['Catproduct']['id'];?>" title="<?php echo $cap1['Catproduct']['name'.LANGUAGE];?>"<?php }else{?>href="<?php echo DOMAIN.$cap1['Catproduct']['slug'];?>"<?php }?>><?php echo $cap1['Catproduct']['name'.LANGUAGE];?>$viewFile = '/home/tracdiathanhda/domains/tracdiathanhdat.vn/public_html/app/View/Elements/menu.ctp' $dataForView = array( 'cat12' => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'description_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'keywords_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'title_for_layout' => 'Máy kinh vĩ', 'tinmoiup' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'tinlq' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'detailNews' => array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'setting' => array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ), 'tin_ft' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'slideshow' => array( (int) 0 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 1 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 2 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 3 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 4 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 5 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 6 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 7 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 8 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 9 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 10 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 11 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 12 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 13 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 14 => array( 'Slideshow' => array( [maximum depth reached] ) ) ), 'adv_khuyenmai' => array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ), 'doitac' => array( (int) 0 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 1 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 2 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 3 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 4 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 5 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 6 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 7 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 8 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 9 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 10 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 11 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 12 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 13 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 14 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 15 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 16 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 17 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 18 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 19 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 20 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 21 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 22 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 23 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 24 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 25 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 26 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 27 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 28 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 29 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 30 => array( 'Advertisement' => array( [maximum depth reached] ) ) ), 'chayphai' => array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ), 'chaytrai' => array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ), 'chiasekinhnghiem' => array(), 'list_menu_footer' => array(), 'danhmuc_left_parent_sphot' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc_left_parent' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'support' => array( (int) 0 => array( 'Support' => array( [maximum depth reached] ) ), (int) 1 => array( 'Support' => array( [maximum depth reached] ) ) ), 'content_for_layout' => '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ', 'scripts_for_layout' => '' ) $cat12 = array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $description_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $keywords_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $title_for_layout = 'Máy kinh vĩ' $tinmoiup = array( (int) 0 => array( 'Post' => array( 'id' => '823', 'name' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật – Những bước quan trọng để đảm bảo độ chính xác', 'code' => null, 'alias' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-–-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập trạm Base RTK đúng cách có quan trọng không? Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Thiết lập trạm Base RTK đúng cách có quan trọng không?<br /> <br /> Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.<br /> <br /> Mặc dù giao diện phần mềm của mỗi hãng có thể khác nhau, quy trình thiết lập Base nhìn chung đều tuân theo các nguyên tắc giống nhau. Dưới đây là các bước cơ bản giúp triển khai một trạm Base RTK ổn định và đáng tin cậy.</em><br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7881291487147_f174a50258d6ad97ccd34f717df81a2b.jpg" style="width: 800px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Chọn vị trí đặt Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quan trọng nhất trước khi bật máy. Một vị trí tốt nên đáp ứng các điều kiện sau:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thoáng, có góc quan sát bầu trời rộng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh cây lớn, mái che hoặc công trình cao tầng che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế đặt gần tường kính, mái tôn hoặc mặt nước để giảm hiện tượng phản xạ tín hiệu (Multipath).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh gần đường dây điện cao thế hoặc nguồn phát sóng mạnh nếu có thể.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nền đất hoặc mặt bằng ổn định, ít rung động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu đặt Base trên mốc khống chế, cần đảm bảo mốc không bị xê dịch trong suốt quá trình đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lắp chân máy và định tâm</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi chọn vị trí phù hợp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở chân máy chắc chắn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều chỉnh chiều cao thuận tiện cho việc thao tác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định tâm chính xác trên mốc bằng dọi quang học hoặc dọi laser (nếu có).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng bọt thủy theo hướng dẫn của thiết bị.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trường hợp sử dụng chân máy thông thường ngoài hiện trường, nên kiểm tra lại việc định tâm sau khi siết chặt các khóa chân máy vì quá trình thao tác có thể làm lệch vị trí ban đầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Đo chiều cao anten</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten là một thông số rất quan trọng. Thông thường, phần mềm sẽ yêu cầu người dùng nhập:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao nghiêng (Slant Height), hoặc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao đứng (Vertical Height).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần đo đúng theo phương pháp mà phần mềm yêu cầu.<br /> <br /> > Một số lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng thước chuyên dụng nếu có.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo ít nhất hai lần để kiểm tra.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại đơn vị (mét hoặc milimét).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không ước lượng bằng mắt.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc nhập sai chiều cao anten sẽ làm sai tọa độ của trạm Base và có thể ảnh hưởng đến toàn bộ dữ liệu hiệu chỉnh RTK.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Thiết lập tọa độ Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quyết định hệ quy chiếu mà Rover sẽ sử dụng. <br /> <br /> 4.1 Trường hợp 1: Base đặt trên điểm đã biết tọa độ (<strong>Known Point</strong>)<br /> <br /> Đây là phương pháp được ưu tiên. Người dùng nhập chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X, Y, H hoặc B, L, H.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ tọa độ tương ứng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi xác nhận, Base sẽ phát dữ liệu hiệu chỉnh dựa trên tọa độ đã biết.<br /> <br /> > Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ tin cậy cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với đo địa chính, khảo sát công trình, hoàn công và các công việc yêu cầu liên kết với hệ tọa độ hiện có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 4.2 Trường hợp 2: <strong>Base Here</strong> (Base tự xác định tọa độ)<br /> <br /> Nếu chưa có mốc khống chế, người dùng có thể để máy tự xác định vị trí hiện tại (Base Here hoặc Autonomous).<br /> Phương pháp này thường được sử dụng khi:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát sơ bộ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập lưới khống chế tạm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình chưa yêu cầu liên kết với hệ tọa độ chính thức.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu ý rằng tọa độ Base Here chỉ mang tính tương đối. Nếu cần liên kết với hệ tọa độ công trình hoặc VN-2000, nên đo khống chế hoặc sử dụng các phương pháp chuyển đổi phù hợp trước khi triển khai chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cấu hình truyền dữ liệu cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Base có tọa độ, cần cấu hình phương thức truyền dữ liệu hiệu chỉnh đến Rover. Hai phương thức phổ biến hiện nay là:<br /> <br /> <strong>5.1 Truyền bằng Radio UHF</strong><br /> <br /> Khi dùng phương thức này cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tần số phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Băng thông (Bandwidth).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao thức truyền (Protocol).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten UHF đã được lắp đúng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base và Rover phải sử dụng cùng cấu hình để có thể liên lạc.<br /> <br /> <strong>5.2 Truyền qua Internet (NTRIP)</strong><br /> <br /> Trong trường hợp sử dụng mạng Internet nội bộ hoặc triển khai Base riêng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra kết nối 4G/5G hoặc Wi-Fi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra địa chỉ IP hoặc Caster.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Port.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mountpoint.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tài khoản và mật khẩu nếu có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Kiểm tra trạng thái phát cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi hoàn tất cấu hình, cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base đã bắt đủ số lượng vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đã bắt đầu phát dữ liệu cải chính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không xuất hiện cảnh báo lỗi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radio hoặc Internet hoạt động ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin hoặc nguồn ngoài đủ cho thời gian làm việc.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các hệ thống Radio, nên kiểm tra thêm cường độ tín hiệu giữa Base và Rover trước khi bắt đầu đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Kiểm tra Rover đã FIX ổn định</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Rover kết nối với Base, không nên đo ngay. <br /> <br /> Nên kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm đạt FIX.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lượng vệ tinh ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PDOP ở mức phù hợp.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Age of Correction thấp và ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số RMS hoặc Estimated Precision nằm trong giới hạn cho phép của công việc.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu Rover liên tục chuyển giữa FIX và FLOAT, cần kiểm tra lại:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách đến Base.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu Radio hoặc Internet.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình truyền dữ liệu.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Một số lỗi thường gặp khi thiết lập Base</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đặt Base không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt dưới tán cây, gần nhà cao tầng hoặc gần nguồn phản xạ mạnh có thể làm giảm chất lượng quan sát GNSS.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo sai chiều cao anten</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá phổ biến và có thể ảnh hưởng đến kết quả tính toán tọa độ của trạm Base.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai tọa độ Base</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ, sai kinh tuyến trục, sai cao độ hoặc nhập nhầm tọa độ sẽ khiến Rover đo sai toàn bộ.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai cấu hình Radio</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác tần số, giao thức hoặc công suất giữa Base và Rover sẽ khiến Rover không nhận được dữ liệu hiệu chỉnh.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Di chuyển Base trong khi đang đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu chân máy bị dịch chuyển trong quá trình làm việc, toàn bộ kết quả sau thời điểm dịch chuyển đều có thể không còn đảm bảo độ tin cậy và nên được kiểm tra hoặc đo lại.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguồn điện không đủ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base mất nguồn hoặc khởi động lại giữa ca đo sẽ làm gián đoạn việc truyền dữ liệu hiệu chỉnh đến Rover.<br /> <br /> >>> Thiết lập Base RTK không chỉ là vài thao tác trên bộ điều khiển mà còn bao gồm việc lựa chọn vị trí đặt máy, định tâm chính xác, nhập đúng chiều cao anten, cấu hình tọa độ và kiểm tra trạng thái hoạt động của toàn bộ hệ thống. Thực hiện đúng các bước ngay từ đầu sẽ giúp Rover nhận dữ liệu hiệu chỉnh ổn định, giảm thời gian xử lý sự cố ngoài thực địa và nâng cao độ tin cậy của kết quả đo.<br /> <br /> Mặc dù tên gọi các chức năng hoặc giao diện có thể khác nhau giữa các hãng, nguyên tắc thiết lập trạm Base về cơ bản vẫn tương tự. Nắm vững các nguyên lý này sẽ giúp người sử dụng dễ dàng làm việc với nhiều dòng RTK khác nhau.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 260626.png" style="width: 800px; height: 533px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Liên hệ ngay <a href="https://zalo.me/0913051734"><span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt qua Zalo</strong></span></a> để được tư vấn chọn máy phù hợp nhất!</span></span><br /> <a class="zalo-float" href="https://zalo.me/0949322456" rel="noopener" target="_blank"> <span class="zalo-icon">Z</span> <span class="zalo-text">Nhắn Zalo</span> </a> <style type="text/css"> .zalo-float { position: fixed; right: 20px; bottom: 90px; z-index: 9999; display: flex; align-items: center; gap: 8px; background: #0068ff; color: #fff; padding: 12px 16px; border-radius: 999px; font-weight: 700; font-size: 15px; text-decoration: none; box-shadow: 0 8px 24px rgba(0,0,0,0.22); } .zalo-float:hover { transform: translateY(-2px); opacity: 0.95; } .zalo-icon { width: 28px; height: 28px; border-radius: 50%; background: #fff; color: #0068ff; display: flex; align-items: center; justify-content: center; font-weight: 800; } @media (max-width: 768px) { .zalo-float { right: 14px; bottom: 80px; padding: 11px 14px; font-size: 14px; } }</style> ', 'images' => '202606260951032f4d94b16f8c4b40c845fa69fd0c4dc4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật từ A đến Z', 'meta_key' => '', 'meta_des' => 'Hướng dẫn chi tiết cách thiết lập trạm Base RTK: chọn vị trí, định tâm, đo chiều cao anten, cấu hình Known Point hoặc Base Here, Radio/NTRIP và các lỗi thường gặp.', 'created' => '2026-06-26', 'modified' => '2026-07-12', 'status' => '1', 'view' => '525', 'slug' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '557', 'rght' => '558', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '822', 'name' => 'Hiểu đúng về RTCM 1021–1027, Helmert (Bursa-Wolf), 7 tham số và chuyển đổi hệ tọa độ', 'code' => null, 'alias' => 'hieu-dung-ve-rtcm-1021–1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàncầu sang hệ tọa độ làm việc tại địa phương.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàn cầu sang hệ tọa độ làm việc tại địa phương.<br /> <br /> Vậy RTK thực chất đo trong hệ nào?<br /> <br /> Máy thu GNSS không đo trực tiếp trong hệ tọa độ VN-2000. Thay vào đó, thiết bị xác định vị trí trong một hệ quy chiếu địa tâm toàn cầu (global geocentric reference frame), chẳng hạn như WGS84 hoặc các realization gần với ITRF (International Terrestrial Reference Frame).<br /> <br /> Trong khi đó, tại Việt Nam, phần lớn bản đồ địa hình, bản đồ địa chính, hồ sơ thiết kế và công trình lại sử dụng hệ tọa độ VN-2000 hoặc hệ tọa độ công trình. <br /> <br /> Vì vậy, trước khi có thể sử dụng ngoài thực địa, kết quả đo GNSS cần được chuyển đổi sang hệ tọa độ làm việc.<br /> <br /> Có thể hình dung quy trình tổng quát như sau: <strong>GNSS/RTK → WGS84 hoặc ITRF (realization cụ thể) → Chuyển đổi hệ quy chiếu và phép chiếu bản đồ (khi cần) → VN-2000 hoặc hệ tọa độ công trình.</strong><br /> <br /> <em>Lưu ý: WGS84 và ITRF đều có nhiều phiên bản (realizations) được cập nhật theo thời gian. Trong hầu hết công việc RTK thông thường, quá trình này đã được phần mềm RTK hoặc dịch vụ CORS xử lý. Tuy nhiên, với các ứng dụng yêu cầu độ chính xác cao hoặc xử lý dữ liệu nhiều thời kỳ, vẫn cần quan tâm đến reference frame và epoch của dữ liệu.</em></span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. 7 tham số là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trắc địa, một trong những mô hình phổ biến để chuyển đổi giữa hai hệ quy chiếu là phép biến đổi 7 tham số (Seven-Parameter Transformation).<br /> <br /> Bộ tham số gồm: </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔX: Tịnh tiến theo trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔY: Tịnh tiến theo trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔZ: Tịnh tiến theo trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rx: Góc quay quanh trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ry: Góc quay quanh trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rz: Góc quay quanh trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Scale: Hệ số tỷ lệ (ppm)</span></span></li> </ul> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/coordtrans datum transformation.gif" style="width: 613px; height: 407px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong đó:<br /> - Ba tham số đầu mô tả sự dịch chuyển giữa hai hệ quy chiếu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ba tham số tiếp theo mô tả sự quay.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Tham số cuối cùng mô tả sự khác biệt về tỷ lệ.</span></span></span></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình này giả thiết rằng mối quan hệ giữa hai hệ quy chiếu có thể được biểu diễn bằng một phép biến đổi gồm ba tham số tịnh tiến, ba tham số quay và một tham số tỷ lệ.<br /> <br /> Trong các phần mềm RTK, người dùng có thể gặp nhiều tên gọi như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Seven Parameters</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Helmert Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bursa-Wolf Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Datum Transformation</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư hiện trường, điều quan trọng cần nhớ là: 7 tham số là một mô hình dùng để chuyển đổi giữa hai hệ quy chiếu.<br /> <br /> Trong những khu vực có biến dạng không đồng nhất, mô hình này có thể không đạt độ chính xác cao bằng các phương pháp sử dụng lưới hiệu chỉnh (Grid Shift).<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Bursa-Wolf và Helmert có giống nhau không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là điểm khá nhiều người nhầm lẫn. Trong nhiều phần mềm RTK, hai tên gọi: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Helmert Transformation & </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Bursa-Wolf Transformation </span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">được sử dụng gần như thay thế cho nhau. <br /> <br /> Tuy nhiên, xét dưới góc độ học thuật, Bursa-Wolf là một quy ước biểu diễn của phép biến đổi Helmert 7 tham số. Sự khác biệt chủ yếu nằm ở quy ước dấu và cách biểu diễn các tham số quay. Đối với phần lớn công việc RTK ngoài thực địa, sự khác biệt này thường không ảnh hưởng đến quá trình sử dụng nếu các tham số được khai báo đúng theo quy ước mà phần mềm yêu cầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Ngoài 7 tham số còn có những phương pháp nào?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi phép chuyển đổi tọa độ đều sử dụng mô hình 7 tham số. Một số phương pháp phổ biến khác gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Molodensky–Badekas</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp này cũng sử dụng bảy tham số nhưng thực hiện phép quay quanh một điểm gốc cục bộ (origin point) thay vì tâm Trái Đất. Cách tiếp cận này thường giúp giảm ảnh hưởng của sai số quay trong các hệ tọa độ địa phương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Grid Shift</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác với mô hình 7 tham số, Grid Shift không sử dụng một bộ tham số chung cho toàn bộ khu vực mà áp dụng các giá trị hiệu chỉnh được nội suy từ lưới.<br /> <br /> Ví dụ: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">NTv2, </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Geoid Grid</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với những khu vực có biến dạng không đồng đều, Grid Shift thường cho độ chính xác cao hơn mô hình 7 tham số.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. RTCM 1021–1027 là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM (Radio Technical Commission for Maritime Services) là tiêu chuẩn quốc tế dùng để truyền dữ liệu hiệu chỉnh trong GNSS RTK. <br /> <br /> Khi nhắc đến RTCM, nhiều người chỉ nghĩ đến các bản tin phục vụ quá trình FIX. Tuy nhiên, trong tiêu chuẩn RTCM 3.x còn có nhóm bản tin 1021–1027, được định nghĩa để truyền các thông tin liên quan đến phép biến đổi datum, phép chiếu bản đồ và một số mô hình hiệu chỉnh phục vụ chuyển đổi sang hệ tọa độ địa phương.<br /> <br /> Theo tài liệu của RTCM SC-104 và một số nhà sản xuất phần mềm GNSS, nhóm bản tin này được thiết kế nhằm hỗ trợ việc chuyển đổi từ hệ quy chiếu GNSS sang hệ tọa độ địa phương. <br /> <br /> Tuy nhiên cần lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi mạng CORS đều phát các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi bộ thu GNSS hoặc phần mềm RTK đều hỗ trợ đầy đủ việc giải mã và áp dụng các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc triển khai có thể khác nhau giữa các phiên bản RTCM, nhà sản xuất thiết bị và dịch vụ CORS.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì vậy, không nên mặc định rằng mọi hệ thống CORS đều truyền hoặc sử dụng RTCM 1021–1027.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1655118093874(1).jpg" style="width: 600px; height: 450px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Vì sao có phần mềm RTK không cần nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, người dùng không cần nhập thủ công, nhưng điều đó không có nghĩa quá trình chuyển đổi không tồn tại. <br /> <br /> Việc chuyển đổi có thể đã được thực hiện thông qua:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cơ sở dữ liệu CRS tích hợp trong phần mềm hoặc bộ điều khiển;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ffile hệ tọa độ (CRS/Projection) được import;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình do nhà sản xuất thiết lập;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin từ dịch vụ CORS;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc các cơ chế chuyển đổi riêng của phần mềm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Do đó, việc không phải nhập không đồng nghĩa với không sử dụng phép chuyển đổi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Khi nào vẫn phải nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số tình huống vẫn cần người dùng thiết lập thủ công, chẳng hạn:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng Base cục bộ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Llàm việc với hệ tọa độ công trình;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng hệ tọa độ địa phương chưa có trong phần mềm;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu khảo sát cũ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc làm việc với các dự án có quy định riêng về hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, người dùng có thể phải:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập 7 tham số;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Import file hệ tọa độ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc thực hiện Site Calibration (Localization).</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. RTCM 1021–1027 có thay thế Site Calibration không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Câu trả lời là không. Hai khái niệm này phục vụ những mục đích khác nhau.<br /> <br /> RTCM 1021–1027 là nhóm bản tin dùng để truyền các thông tin liên quan đến phép chuyển đổi hệ quy chiếu và phép chiếu bản đồ. Trong khi đó, Site Calibration (Localization) là quá trình thiết lập mối quan hệ giữa hệ tọa độ GNSS và hệ tọa độ của dự án thông qua các điểm khống chế ngoài thực địa.<br /> <br /> Site Calibration không thay thế phép chuyển đổi giữa các hệ quy chiếu mà chỉ hiệu chỉnh cục bộ để phù hợp với hệ tọa độ công trình. Ngay cả khi sử dụng mạng CORS và chọn đúng hệ tọa độ, nhiều dự án vẫn yêu cầu kiểm tra trên các mốc khống chế trước khi tiến hành đo chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Những lỗi thường gặp ngoài thực địa</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Qua thực tế sử dụng RTK, một số lỗi liên quan đến hệ tọa độ thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai datum hoặc realization.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai đơn vị của Rx, Ry, Rz (độ, giây hoặc radian).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai hệ số Scale (ppm hoặc hệ số tỷ lệ).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dùng nhầm hệ tọa độ công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tin tưởng trạng thái FIX nhưng không kiểm tra trên mốc khống chế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những nguyên nhân có thể khiến tọa độ sai hàng mét, thậm chí hàng chục mét dù máy vẫn báo FIX bình thường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">9. Người sử dụng RTK cần quan tâm đến điều gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với phần lớn công việc khảo sát, địa chính, thi công hoặc hoàn công, người dùng không nhất thiết phải nhớ chi tiết từng bản tin RTCM.<br /> <br /> Điều quan trọng hơn là:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo đúng Job / Project.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng mountpoint khi dùng CORS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập đúng chiều cao anten.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại trên mốc khống chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ nhìn trạng thái FIX mà bỏ qua cấu hình hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu kết quả đo lệch toàn bộ so với bản vẽ hoặc mốc ngoài thực địa, cần kiểm tra lại hệ tọa độ trước khi nghi ngờ máy RTK hoặc tín hiệu vệ tinh.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> RTCM 1021–1027, Helmert, Bursa-Wolf, 7 tham số và Site Calibration đều liên quan đến quá trình đưa kết quả GNSS về hệ tọa độ làm việc, nhưng chúng không phải là các khái niệm tương đương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS xác định vị trí trong hệ quy chiếu toàn cầu, thường là WGS84 hoặc các realization gần với ITRF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">VN-2000 và hệ tọa độ công trình là các hệ tọa độ làm việc được sử dụng trong khảo sát, thiết kế và thi công tại Việt Nam.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7 tham số (Bursa-Wolf/Helmert) là một trong những mô hình phổ biến dùng để chuyển đổi tọa độ giữa các hệ quy chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM 1021–1027 là nhóm bản tin được thiết kế để hỗ trợ truyền thông tin liên quan đến phép biến đổi tọa độ và phép chiếu bản đồ. Tuy nhiên, việc các bản tin này có được sử dụng hay không còn phụ thuộc vào phiên bản RTCM, hệ thống CORS và phần mềm RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Site Calibration (Localization) là quá trình hiệu chỉnh cục bộ theo các điểm khống chế của dự án và không nên xem là sự thay thế cho các phép biến đổi giữa các hệ quy chiếu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư khảo sát và thi công, hiểu đúng vai trò của từng khái niệm sẽ giúp cấu hình RTK chính xác hơn, xử lý tốt các tình huống liên quan đến hệ tọa độ và hạn chế các sai lệch không đáng có ngoài thực địa.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 230626 2.png" style="width: 800px; height: 533px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;"><u><strong>Tài liệu tham khảo</strong></u></span></span><br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">RTCM Special Committee 104 – <em>RTCM Standard for Differential GNSS (Multiple Signal Messages)</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IOGP – <em>Geomatics Guidance Note 7, Coordinate Conversions and Transformations</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">EPSG Geodetic Parameter Dataset & Guidance Note 7-2.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">ISO 19111 – <em>Geographic Information — Referencing by Coordinates</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Carlson Software – <em>RTCM 1021–1027 White Paper</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Leica Geosystems – <em>Captivate Coordinate System Guide</em>.</span></span></li> </ul> ', 'images' => '20260625150050d64d8db365e7a0f663896871ecf242ce.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'RTK chuyển từ WGS84 sang VN-2000 như thế nào? Giải thích RTCM 1021–1027 và 7 tham số', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách RTK chuyển đổi từ WGS84 sang VN-2000, bản chất của RTCM 1021–1027, Bursa-Wolf Transformation, Helmert 7 tham số và vai trò của Site Calibration trong GNSS RTK.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '752', 'slug' => 'hieu-dung-ve-rtcm-1021-1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '555', 'rght' => '556', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '821', 'name' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân phổ biến và cách khắc phục!', 'code' => null, 'alias' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Với khả năng xác định tọa độ ở độ chính xác mức centimet, RTK đã trở thành công cụ gần như không thể thiếu đối với nhiều kỹ sư. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Trong điều kiện làm việc phù hợp và khi đạt trạng thái FIX, công nghệ RTK có thể cung cấp tọa độ với độ chính xác ở mức centimet. Chính vì vậy, RTK đã trở thành một trong những công cụ quan trọng đối với nhiều kỹ sư khảo sát và xây dựng. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy GPS RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.<br /> </em><br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>I. Trạng thái FIX trong RTK là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công nghệ GNSS RTK, trạng thái FIX (Fixed Solution) là khi bộ thu đã giải được số nguyên chu kỳ sóng mang (<em>Integer Ambiguity</em>). Khi đó, hệ thống có thể xác định tọa độ với độ chính xác ở mức centimet trong điều kiện làm việc phù hợp.<br /> <br /> Thông thường, máy RTK sẽ hiển thị một trong các trạng thái sau:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Single: Định vị độc lập bằng tín hiệu vệ tinh, sai số thường ở mức vài mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DGPS/SBAS: Có dữ liệu hiệu chỉnh, độ chính xác được cải thiện so với Single nhưng chưa đạt mức RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Float: Đã nhận dữ liệu cải chính nhưng chưa giải được hoàn toàn số nguyên chu kỳ sóng mang.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX: Định vị RTK với độ chính xác cao, đáp ứng phần lớn yêu cầu của công tác trắc địa.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lưu ý rằng, trạng thái FIX không đồng nghĩa với việc kết quả luôn chính xác tuyệt đối. Độ tin cậy của phép đo còn phụ thuộc vào điều kiện quan sát vệ tinh, môi trường làm việc, cấu hình hệ tọa độ và việc kiểm tra chất lượng số liệu ngoài thực địa.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 3 FIX.png" style="width: 620px; height: 566px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Không đủ vệ tinh hoặc hình học vệ tinh không thuận lợi</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để đạt được nghiệm FIX, máy RTK cần quan sát đồng thời đủ số lượng vệ tinh với sự phân bố hợp lý trên bầu trời. Máy có thể khó FIX hoặc FIX chậm khi làm việc trong các môi trường như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần nhà cao tầng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hẻm sâu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khu vực có nhiều cây lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dưới mái che hoặc trong nhà xưởng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa hình núi đá che khuất bầu trời.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài số lượng vệ tinh, chỉ số PDOP (Position Dilution of Precision) cũng ảnh hưởng đáng kể đến khả năng FIX. Dù quan sát được nhiều vệ tinh, nếu hình học vệ tinh không thuận lợi thì thời gian FIX vẫn có thể kéo dài hoặc nghiệm FIX kém ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 2 FIX.png" style="width: 600px; height: 400px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hiện tượng đa đường tín hiệu (Multipath)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đa đường tín hiệu là một trong những nguyên nhân phổ biến khiến máy RTK khó giữ FIX. Hiện tượng này xảy ra khi tín hiệu GNSS bị phản xạ qua các bề mặt như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tường kính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhà thép tiền chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xe ô tô hoặc container.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặt nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hàng rào thép.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi bộ thu nhận đồng thời tín hiệu trực tiếp và tín hiệu phản xạ, việc xác định pha sóng mang trở nên khó khăn hơn, khiến nghiệm RTK thiếu ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 5 FIX.png" style="width: 620px; height: 348px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Khoảng cách giữa Base và Rover quá lớn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong hệ thống RTK Base – Rover truyền thống, khoảng cách giữa hai máy ảnh hưởng trực tiếp đến chất lượng dữ liệu cải chính. Trong điều kiện các yếu tố khác tương đương, khoảng cách giữa Base và Rover càng lớn thì việc giải nghiệm RTK thường càng khó khăn hơn.<br /> <br /> Khi khoảng cách tăng lên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số tầng điện ly và tầng đối lưu giữa hai điểm tăng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mức độ tương quan của tín hiệu giảm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian FIX có thể lâu hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giữ FIX giảm trong điều kiện khó.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK Network sử dụng CORS (VRS, iMAX hoặc Single Base), người dùng thường không làm việc với một trạm Base duy nhất. Khả năng FIX còn phụ thuộc vào mật độ mạng CORS, thuật toán xử lý của hệ thống và điều kiện quan sát vệ tinh.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 4 FIX.png" style="width: 620px; height: 410px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Kết nối Internet hoặc dữ liệu cải chính không ổn định</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi sử dụng RTK Network thông qua NTRIP, dữ liệu RTCM phải được truyền liên tục từ máy chủ CORS đến Rover. Một số nguyên nhân thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sóng 4G/5G yếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Wi-Fi không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Server CORS bị gián đoạn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Age of Differential tăng cao.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, dữ liệu cải chính có thể bị trễ hoặc gián đoạn. Tùy từng hãng và từng dòng máy, một số thiết bị có thể duy trì nghiệm FIX trong thời gian ngắn nhờ các tính năng như RTK Hold, RTK Keep hoặc các cơ chế tương tự. Tuy nhiên, nếu việc gián đoạn kéo dài, máy thường sẽ chuyển sang FLOAT hoặc SINGLE.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Nhiễu điện từ và nhiễu vô tuyến</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS từ vệ tinh có công suất rất nhỏ khi đến mặt đất nên dễ bị ảnh hưởng bởi các nguồn nhiễu mạnh. Một số nguồn nhiễu thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạm BTS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radar.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường dây điện cao thế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy phát sóng công suất lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống radio công nghiệp.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK sử dụng Radio UHF, nhiễu vô tuyến còn có thể làm giảm chất lượng liên lạc giữa Base và Rover.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 6 FIX.png" style="width: 620px; height: 411px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Anten GNSS bị che khuất hoặc lắp đặt chưa phù hợp</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng thu tín hiệu của máy RTK phụ thuộc rất nhiều vào vị trí đặt anten. Một số tình huống có thể làm giảm chất lượng tín hiệu gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đứng quá sát tường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt gần xe ô tô.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần mái tôn hoặc kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten bị che bởi người đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cáp hoặc anten bị hư hỏng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lựa chọn vị trí đặt máy thông thoáng luôn là một trong những giải pháp đơn giản nhưng mang lại hiệu quả cao.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Điều kiện khí quyển và hoạt động không gian</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS chịu ảnh hưởng của tầng điện ly và tầng đối lưu. Trong các thời điểm như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bão từ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Kp cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động điện ly mạnh.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">khả năng FIX có thể giảm so với điều kiện bình thường. Trong đa số trường hợp, mưa nhỏ không phải là nguyên nhân chính gây mất FIX.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 1 FIX.png" style="width: 620px; height: 413px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Firmware hoặc cấu hình máy chưa phù hợp<br /> </span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các bản cập nhật firmware mới có thể:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cải thiện thuật toán RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thêm tín hiệu GNSS mới.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khắc phục các lỗi đã được nhà sản xuất ghi nhận.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng khả năng tương thích với các chuẩn RTCM.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, một số cấu hình chưa phù hợp cũng có thể ảnh hưởng đến khả năng FIX, chẳng hạn như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ bật một số hệ vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập góc cắt vệ tinh chưa hợp lý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai thông số truyền Radio giữa Base và Rover.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Người dùng nên cập nhật firmware theo khuyến nghị của nhà sản xuất và kiểm tra lại cấu hình trước khi làm việc ngoài hiện trường.</span></span><br /> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">9. Hiệu năng của từng dòng máy RTK</span></h3> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Không phải mọi bộ thu GNSS RTK đều có khả năng làm việc giống nhau. Hiệu năng của thiết bị phụ thuộc vào nhiều yếu tố như:</span></span><br /> <br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thiết kế anten GNSS.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Chip xử lý tín hiệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thuật toán RTK.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Khả năng chống đa đường.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Tốc độ xử lý dữ liệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Mức độ tối ưu của phần mềm điều khiển.</span></span></li> </ul> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Vì vậy, ngay cả khi làm việc trong cùng điều kiện hiện trường, tốc độ FIX và khả năng giữ FIX giữa các dòng máy cũng có thể khác nhau.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10. Máy vẫn FIX nhưng tọa độ bị sai</span></span></h3> <h3> </h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi thường bị nhầm với hiện tượng "không FIX". Trong nhiều trường hợp, máy vẫn báo FIX bình thường nhưng tọa độ sai đáng kể do:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai tham số chuyển đổi.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp tình huống này, cần kiểm tra lại cấu hình hệ quy chiếu trước khi nghi ngờ chất lượng tín hiệu GNSS.</span></span><br /> <p style="text-align: center;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/Esurvey.jpg" style="width: 620px; height: 324px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Làm thế nào để cải thiện khả năng FIX?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để nâng cao khả năng FIX khi đo RTK, người dùng nên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đo thông thoáng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế làm việc gần các bề mặt phản xạ mạnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra số lượng vệ tinh và chỉ số PDOP.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo kết nối Internet hoặc Radio ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi chỉ số Age of Differential.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra đúng cấu hình hệ tọa độ trước khi đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cập nhật firmware theo khuyến nghị của nhà sản xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra định kỳ anten và phụ kiện.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm trên các điểm khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ dựa vào trạng thái FIX, nên kiểm tra trên mốc khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác. <br /> <br /> >>> Máy GPS RTK không phải lúc nào cũng đạt trạng thái FIX ngay sau khi khởi động. Khả năng FIX phụ thuộc vào nhiều yếu tố như điều kiện quan sát vệ tinh, hiện tượng đa đường, chất lượng dữ liệu cải chính, kết nối Internet hoặc Radio, điều kiện khí quyển, cấu hình thiết bị và môi trường làm việc.<br /> <br /> Trong thực tế, trạng thái FIX là điều kiện cần nhưng chưa phải điều kiện đủ để khẳng định chất lượng kết quả đo. Bên cạnh việc theo dõi trạng thái FIX, người sử dụng vẫn nên kết hợp kiểm tra trên mốc khống chế, đo lặp các điểm quan trọng và đánh giá điều kiện hiện trường nhằm đảm bảo độ tin cậy của số liệu.<br /> <br /> Hiểu rõ các nguyên nhân trên sẽ giúp kỹ sư trắc địa xử lý nhanh các tình huống ngoài thực địa, lựa chọn phương án đo phù hợp và khai thác hiệu quả hơn công nghệ GNSS RTK.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/TRẮC ĐỊA THÀNH ĐẠT (Logo) (Ảnh bìa Facebook).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 300px;" /></p> <br /> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ ngay </span><a href="https://zalo.me/0949322456" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><span style="margin: 0px; padding: 0px; color: rgb(255, 102, 0);"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt qua Zalo</strong></span></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để được tư vấn chọn máy phù hợp nhất!</span>', 'images' => '20260625110358e00121db9ef2b0248aadce5ad04f0e9d.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân và cách khắc phục', 'meta_key' => '', 'meta_des' => 'Máy GPS RTK không FIX được hoặc thường xuyên chuyển giữa FIX và FLOAT? Tìm hiểu 10 nguyên nhân phổ biến như vệ tinh, CORS, Internet, Base, nhiễu tín hiệu và cách khắc phục hiệu quả.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '537', 'slug' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '553', 'rght' => '554', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '820', 'name' => 'AI trong ngành trắc địa: Công việc nào sẽ được tự động hóa trước?', 'code' => null, 'alias' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span><o:p></o:p></p> <p data-end="686" data-start="526"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang dần xuất hiện trong nhiều công đoạn của quy trình khảo sát và thành lập bản đồ.</span></span><o:p></o:p></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span></em><br /> <br /> <o:p></o:p></p> <p data-end="686" data-start="526"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, phân loại dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang giúp giảm đáng kể thời gian xử lý dữ liệu và hỗ trợ kỹ sư đưa ra quyết định nhanh hơn. Tuy nhiên, một câu hỏi được nhiều người quan tâm là: </span></span></em><em style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Công việc nào trong ngành trắc địa sẽ được AI tự động hóa trước?</strong></em></p> <p style="text-align: center;"> </p> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and BIM 2.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 450px; height: 299px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong quá trình khảo sát và thành lập bản đồ, khối lượng dữ liệu thu thập được ngày càng lớn. Một chuyến bay UAV có thể tạo ra hàng nghìn ảnh chụp.<br /> <br /> Một dự án LiDAR có thể tạo ra hàng triệu đến hàng tỷ điểm Point Cloud. <br /> <br /> Các hệ thống quan trắc hiện đại có thể ghi nhận dữ liệu liên tục 24/7.<br /> <br /> Khối lượng dữ liệu này vượt xa khả năng xử lý thủ công của con người. Đây chính là môi trường lý tưởng để AI phát huy hiệu quả. Theo nhiều nghiên cứu gần đây, AI đặc biệt phù hợp với các nhiệm vụ nhận dạng mẫu, phân loại dữ liệu, phát hiện bất thường và tự động hóa các quy trình xử lý lặp lại.</span></span><br /> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">A. AI đang được ứng dụng như thế nào trong trắc địa?</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Xử lý dữ liệu UAV và ảnh viễn thám</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lĩnh vực phát triển nhanh nhất hiện nay. AI có thể hỗ trợ:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng nhà cửa, đường giao thông và cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động phân loại lớp phủ bề mặt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện thay đổi địa hình qua nhiều thời điểm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thành lập bản đồ hiện trạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều nghiên cứu đã chứng minh AI có khả năng tự động nhận dạng và trích xuất đối tượng từ ảnh UAV với độ chính xác cao, giúp giảm đáng kể khối lượng công việc số hóa thủ công.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and UAV.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Xử lý Point Cloud và LiDAR</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong các dự án quét laser mặt đất hoặc UAV LiDAR, việc phân loại Point Cloud thường tiêu tốn rất nhiều thời gian.<br /> AI hiện có thể:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tách điểm mặt đất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng công trình xây dựng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo mô hình 3D bán tự động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số hệ thống hiện nay còn có khả năng xử lý dữ liệu LiDAR gần như theo thời gian thực và tự động phân loại địa vật với mức can thiệp thủ công rất thấp.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and Lidar.jpg" style="width: 500px; height: 333px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Thành lập và cập nhật bản đồ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong lĩnh vực GIS và bản đồ, AI đang được ứng dụng để:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động số hóa đối tượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất ranh giới địa vật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lỗi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện các bất thường về hình học và thuộc tính.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các nghiên cứu về bản đồ địa chính và bản đồ nền cho thấy AI có tiềm năng rút ngắn đáng kể thời gian thành lập và cập nhật dữ liệu bản đồ.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and Mapping(1).jpg" style="width: 600px; height: 300px;" /></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Quan trắc công trình và giám sát biến dạng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các công trình cầu, đập, nhà cao tầng hoặc mỏ khai thác, dữ liệu quan trắc thường được thu thập liên tục trong thời gian dài AI có thể giúp:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện số liệu bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi xu hướng chuyển vị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự báo nguy cơ lún hoặc nghiêng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ cảnh báo sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây được xem là một trong những hướng ứng dụng có tiềm năng lớn vì AI rất giỏi trong việc phát hiện các quy luật ẩn trong tập dữ liệu dài hạn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and monitoring.jpg" style="width: 600px; height: 335px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Công việc văn phòng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu phải lựa chọn một nhóm công việc có khả năng được AI tự động hóa trước trong ngành trắc địa, thì đó có lẽ là các công việc văn phòng mang tính lặp lại và xử lý dữ liệu. Các công việc như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu giữa các định dạng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tổng hợp số liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra các lỗi dữ liệu đơn giản.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu, bảng biểu và báo cáo kỹ thuật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất thông tin từ nhật ký hoặc sổ đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại và sắp xếp dữ liệu dự án.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những công việc có quy trình tương đối rõ ràng và ít phụ thuộc vào đánh giá chuyên môn của kỹ sư. Trên thực tế, nhiều phần mềm hiện nay đã bắt đầu tích hợp các tính năng tự động hóa dạng này. AI chỉ đang giúp các quy trình đó trở nên thông minh và hiệu quả hơn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ai and office.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">B. Công việc nào khó bị AI thay thế?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực tế hiện nay, đây có lẽ là nhóm ứng dụng AI gần gũi nhất với nhiều kỹ sư trắc địa. Thay vì mất hàng giờ để viết các công cụ Excel, Python hoặc VBA, nhiều kỹ sư đã bắt đầu sử dụng AI để hỗ trợ:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Viết chương trình chuyển đổi tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán stakeout tim tuyến, cọc khoan nhồi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra dữ liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển ảnh sổ đo thành bảng tính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu nghiệm thu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Soạn thảo báo cáo kỹ thuật.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AI không thực hiện thay công việc chuyên môn, nhưng có thể giúp rút ngắn đáng kể thời gian xử lý các công việc lặp lại.<br /> <br /> >>> Nếu GNSS giúp người làm trắc địa đo nhanh hơn, UAV giúp thu thập dữ liệu nhanh hơn thì AI có thể giúp xử lý dữ liệu nhanh hơn.</span></span> <p data-end="2115" data-start="1963"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong tương lai gần, lợi thế có thể không nằm ở việc ai sử dụng AI hay không, mà nằm ở việc ai biết khai thác AI hiệu quả hơn trong công việc hàng ngày. </span></span><br /> <br /> <strong><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="text-align: justify; margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span></strong></p> ', 'images' => '20260617172058d2979529aed88d220bef4d1f33c5f441.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'AI trong trắc địa: Công việc nào sẽ được tự động hóa trước?', 'meta_key' => '', 'meta_des' => 'AI đang được ứng dụng ngày càng nhiều trong ngành trắc địa, từ xử lý UAV, LiDAR, bản đồ đến lập báo cáo kỹ thuật. Vậy công việc nào sẽ được AI tự động hóa trước? Tìm hiểu trong bài viết này.', 'created' => '2026-06-17', 'modified' => '2026-07-11', 'status' => '1', 'view' => '670', 'slug' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '551', 'rght' => '552', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '819', 'name' => 'BIM và LiDAR đang dùng những định dạng dữ liệu nào? Giải thích IFC, RVT, NWD, LAS, LAZ từ A-Z', 'code' => null, 'alias' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.</span></span><br /> ', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.<br /> <br /> Vậy các định dạng này dùng để làm gì và khác nhau như thế nào?</em></span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Nhóm dữ liệu BIM</span></span></h2> <br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 IFC (Industry Foundation Classes)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC là định dạng trao đổi dữ liệu BIM mở được phát triển bởi buildingSMART. Mục đích chính của IFC là cho phép các phần mềm BIM khác nhau trao đổi mô hình với nhau mà không phụ thuộc vào một hãng phần mềm cụ thể.</span></span><br /> <br /> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>- Ưu điểm:</strong> Không phụ thuộc vào một nhà cung cấp phần mềm cụ thể, hỗ trợ phối hợp giữa nhiều bộ môn và phù hợp cho việc bàn giao, lưu trữ dữ liệu dự án trong thời gian dài.</span></span><br /> <br /> <o:p></o:p></p> <p data-end="608" data-start="295"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="307" data-start="295">- Hạn chế:</strong> Không phải phần mềm BIM nào cũng hỗ trợ đầy đủ mọi tính năng của IFC. Trong một số trường hợp, các tham số đối tượng, Family phức tạp hoặc dữ liệu chuyên biệt có thể bị mất hoặc thay đổi khi chuyển đổi. Ngoài ra, khả năng tương thích còn phụ thuộc vào phiên bản IFC sử dụng (IFC2x3, IFC4, IFC4.3...).</span></span><br /> <br /> <o:p></o:p></p> <p data-end="858" data-start="613"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="634" data-start="613">- Ứng dụng thực tế:</strong> IFC thường được sử dụng để trao đổi dữ liệu giữa các bộ môn, bàn giao mô hình BIM cho chủ đầu tư và lưu trữ dữ liệu dự án theo định dạng mở (vendor-neutral), giúp giảm sự phụ thuộc vào một phần mềm hoặc nhà cung cấp cụ thể.</span></span><o:p></o:p></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Autodesk Revit, Tekla Structures, Archicad, Bentley OpenBuildings đều có thể xuất hoặc nhập file IFC nên IFC thường được xem là "ngôn ngữ chung" của BIM.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 BCF (BIM Collaboration Format)</span></span></h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">BCF được sử dụng để trao đổi các vấn đề (Issue), bình luận (Comment), góc nhìn (Viewpoint) và vị trí cần xử lý trong mô hình BIM. BCF không chứa mô hình 3D mà chỉ lưu thông tin phục vụ quá trình phối hợp giữa các bên.</span> <p> <br /> <strong data-end="337" data-start="325" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Dung lượng nhỏ, dễ chia sẻ và tích hợp với nhiều nền tảng BIM như Autodesk Construction Cloud (BIM 360), Solibri, Tekla BIMsight và các hệ thống quản lý Issue khác. BCF đặc biệt hữu ích trong các cuộc họp phối hợp (Coordination Meeting), kiểm tra va chạm (Clash Detection) và quy trình QA/QC.</span></p> <p data-end="630" data-start="325"> <br /> <strong data-end="653" data-start="635" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Lưu ý thực tế:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> BCF thường được sử dụng kèm với các file mô hình như IFC, RVT hoặc NWD để người dùng có thể xem đầy đủ bối cảnh của vấn đề. Một ưu điểm quan trọng của BCF là khả năng theo dõi lịch sử xử lý (Traceability), giúp liên kết giữa vấn đề được phát hiện, người phụ trách và các thay đổi được thực hiện trong dự án.</span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 RVT</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RVT là định dạng dự án của Autodesk Revit. Một file RVT có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiến trúc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống MEP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số vật liệu</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng BIM được sử dụng rất phổ biến hiện nay.</span></span><br /> <br /> <p data-end="355" data-start="108"> <strong data-end="372" data-start="360" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Lưu giữ đầy đủ tham số đối tượng, lịch sử làm việc, Worksharing và các thông tin thiết kế chi tiết. RVT là định dạng mang lại khả năng làm việc đầy đủ nhất trong môi trường Revit.</span></p> <p data-end="552" data-start="360"> </p> <p data-end="808" data-start="557"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="569" data-start="557">Hạn chế:</strong> RVT là định dạng độc quyền (proprietary) của Autodesk. Các phần mềm BIM khác thường không thể đọc hoặc khai thác đầy đủ toàn bộ thông tin trong file RVT. Vì vậy, khi cần phối hợp đa nền tảng, người dùng thường phải xuất sang IFC hoặc NWD.</span></span><br /> </p> <p data-end="1161" data-start="813"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="831" data-start="813">Lưu ý thực tế:</strong> RVT thường được sử dụng trong nội bộ đơn vị thiết kế hoặc giữa các bên cùng sử dụng Revit. Khi cần trao đổi dữ liệu với chủ đầu tư, nhà thầu hoặc các đơn vị sử dụng phần mềm khác, IFC thường là lựa chọn phổ biến để bàn giao mô hình BIM, trong khi NWD thường được sử dụng cho công tác phối hợp và kiểm tra mô hình trên Navisworks.</span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 RFA</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA là định dạng Family của Revit. Family có thể hiểu là thư viện các đối tượng BIM như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa sổ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị điện</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị cơ điện</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA tương tự như Block trong AutoCAD nhưng có nhiều thông tin tham số hơn.<br /> <br /> <strong>Ưu điểm</strong>: RFA cho phép mô tả đối tượng bằng các tham số chi tiết như kích thước, vật liệu, mã thiết bị và thông tin kỹ thuật. Nhờ đó, các đối tượng có thể dễ dàng tái sử dụng giữa nhiều dự án khác nhau, đồng thời giúp chuẩn hóa dữ liệu BIM trong doanh nghiệp.<br /> <br /> <strong>Hạn chế</strong>: RFA là định dạng riêng của Revit nên chủ yếu hoạt động trong hệ sinh thái Autodesk. Khi xuất sang IFC, các Family phức tạp có thể bị đơn giản hóa hoặc mất một phần tham số do sự khác biệt giữa các chuẩn dữ liệu BIM.<br /> <br /> <strong>Lưu ý</strong>: Nên tiêu chuẩn hóa thư viện Family trước khi triển khai dự án hoặc bàn giao dữ liệu. Đối với các Family quan trọng, cần quản lý phiên bản (Version Control) và tài liệu hóa các tham số chính để đảm bảo tính nhất quán giữa các bộ môn và các giai đoạn của dự án.</span></span><br /> <br /> <h3> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.5 RTE</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTE là định dạng Template của Revit. Đây là file mẫu được sử dụng khi khởi tạo dự án mới nhằm đảm bảo tiêu chuẩn hóa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Family</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy ước đặt tên</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số dự án</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/BIM 2(1).jpg" style="width: 662px; height: 463px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Nhóm dữ liệu Navisworks</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 NWD</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD là định dạng mô hình tổng hợp của Autodesk Navisworks. File NWD có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều mô hình BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Clash Detection</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Markup</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu phối hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng thường được sử dụng trong các cuộc họp BIM hoặc bàn giao mô hình.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 NWC</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWC là định dạng trung gian của Navisworks. File NWC thường nhẹ hơn NWD và được sử dụng để tăng tốc quá trình nạp mô hình.<br /> Nhiều dự án BIM sử dụng NWC làm định dạng trao đổi nội bộ giữa các bộ môn.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.3 NWV</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWV là định dạng Viewpoint của Navisworks. Nó lưu các thông tin về:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái hiển thị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thiết lập quan sát mô hình</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với NWD hoặc NWC, NWV ít được sử dụng hơn.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Navisworks.jpg" style="width: 680px; height: 392px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Nhóm dữ liệu Point Cloud</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 LAS (LASer File Format)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS là định dạng tiêu chuẩn lưu trữ dữ liệu Point Cloud từ công nghệ LiDAR. Mỗi điểm trong file LAS có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Intensity</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GPS Time</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Classification</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Màu RGB</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS thường được tạo ra từ: UAV LiDAR; Mobile Mapping; SLAM Scanner; Máy quét laser mặt đất (TLS); LiDAR hàng không. Một file LAS có thể chứa từ hàng triệu đến hàng trăm triệu điểm.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 LAZ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAZ là phiên bản nén của LAS. Tương tự như DXF, DWG; ZIP và thư mục dữ liệu. <br /> <br /> LAZ giúp giảm đáng kể dung lượng lưu trữ nhưng vẫn giữ nguyên thông tin Point Cloud. Hiện nay phần lớn các dự án LiDAR đều sử dụng LAZ để tối ưu dung lượng và tốc độ truyền dữ liệu.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lidar format.jpg" style="width: 565px; height: 353px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. So sánh nhanh các nhóm dữ liệu</span></span></h2> <br /> <table border="1" cellpadding="0" cellspacing="3" style="width: 100%"> <tbody> <tr> <td style="width: 128px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nhóm dữ liệu</strong></span></span></td> <td style="width: 160px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Định dạng phổ biến</strong></span></span></td> <td style="width: 212px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Mục đích</strong></span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ điểm</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý điểm đo, stakeout</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CAD</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF, DWG</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Bản vẽ kỹ thuật 2D/3D</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">BIM</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC, RVT, RFA, RTE, BCF</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình công trình số</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Navisworks</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD, NWC, NWV</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Phối hợp và kiểm tra mô hình</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Cloud</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS, LAZ</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu quét laser và LiDAR</span></span></td> </tr> </tbody> </table> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Sự phát triển của BIM, UAV LiDAR và công nghệ quét laser 3D đang làm thay đổi cách dữ liệu được tạo ra và sử dụng trong ngành xây dựng.<br /> <br /> Nếu CSV và DXF vẫn là những định dạng quen thuộc đối với kỹ sư đo đạc thì IFC, RVT, NWD hay LAS đang trở thành những định dạng ngày càng phổ biến trong các dự án hiện đại.<br /> <br /> Việc hiểu được chức năng của từng loại dữ liệu sẽ giúp kỹ sư lựa chọn đúng định dạng, trao đổi thông tin hiệu quả hơn và tránh nhiều sai sót trong quá trình triển khai dự án.</span></span><br /> <br /> <h2 data-end="2546" data-start="2275" id="lien-he-trac-dia-thanh-dat-de-duoc-tu-van-giai-phap-phu-hop-voi-tung-loai-cong-trinh" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span><br /> <br /> <span style="display: none;"> </span><span style="display: none;"> </span><img alt="" src="/admin/webroot/upload/image/images/bim 5.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; color: rgb(34, 34, 34); width: 678px; height: 452px;" /><span style="display: none;"> </span><span style="display: none;"> </span></h2> <p> </p> ', 'images' => '2026061315274748a34b386d28d2887f07eb97a60c9540.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Ngoài CSV và DXF: Tìm hiểu các định dạng IFC, RVT, NWD, LAS trong BIM và quét laser 3D', 'meta_key' => '', 'meta_des' => 'iFC, RVT, NWD, LAS, LAZ là gì? Tìm hiểu các định dạng dữ liệu BIM, Navisworks và Point Cloud phổ biến trong xây dựng, đo đạc, UAV LiDAR và quét laser 3D.', 'created' => '2026-06-13', 'modified' => '2026-07-12', 'status' => '1', 'view' => '810', 'slug' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '549', 'rght' => '550', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '818', 'name' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'code' => null, 'alias' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></p> <p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></em></p> <p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></em></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Từ cuộc đua vệ tinh đến cuộc đua trải nghiệm ngoài thực địa</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng 10 năm trước, khi một hãng giới thiệu thế hệ máy GNSS RTK mới, những thông số thường được nhắc đến nhiều nhất là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi được bao nhiêu kênh vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ những hệ thống GNSS nào.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX nhanh hơn bao nhiêu giây.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao hơn bao nhiêu milimet.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời điểm đó, đây thực sự là những yếu tố tạo nên sự khác biệt giữa các sản phẩm trên thị trường. Các hãng liên tục nâng số lượng kênh từ vài trăm lên hàng nghìn kênh. Những hệ thống mới như Galileo, BeiDou hay QZSS lần lượt được bổ sung. Công nghệ xử lý tín hiệu cũng ngày càng hoàn thiện.<br /> <br /> Tuy nhiên, khi nhìn vào thị trường hiện nay, có thể thấy cuộc đua đó đang dần thay đổi. Hầu hết các dòng RTK hiện đại đều đã hỗ trợ đa hệ vệ tinh, đa tần số và có khả năng đạt độ chính xác centimet trong điều kiện làm việc bình thường. Khi khoảng cách công nghệ về phần cứng GNSS ngày càng thu hẹp, các hãng bắt đầu tìm kiếm một hướng đi mới - Đó là nâng cao trải nghiệm làm việc ngoài thực địa.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Điều mà kỹ sư đo đạc thực sự quan tâm là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với người sử dụng máy RTK ngoài công trường, câu hỏi quan trọng nhất thường không phải: "Máy này theo dõi được bao nhiêu vệ tinh?" mà là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi hoàn thành công việc nhanh hơn không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi đo được những vị trí khó không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm được thời gian đi lại ngoài hiện trường không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm số lượng thiết bị phải mang theo không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp công việc an toàn hơn không?</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây chính là lý do nhiều công nghệ mới xuất hiện trong vài năm gần đây.<br /> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. IMU – Bước thay đổi đầu tiên</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một trong những cải tiến có ảnh hưởng lớn nhất là công nghệ IMU. Trước đây, việc giữ sào GNSS thẳng đứng gần như là yêu cầu bắt buộc.<br /> Những vị trí như: chân tường, góc công trình, mép hàng rào hay khu vực cây cối thường gây khó khăn cho người đo. Nhưng IMU đã thay đổi hoàn toàn cách làm việc này. Người sử dụng có thể nghiêng sào trong một phạm vi nhất định mà vẫn duy trì được độ chính xác cao.<br /> <br /> Ngày nay, bù nghiêng gần như đã trở thành tính năng tiêu chuẩn trên các dòng RTK mới.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (1).png" style="width: 680px; height: 383px;" /></span></span></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Camera – Khi RTK bắt đầu "nhìn thấy" hiện trường</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau IMU, các hãng tiếp tục đưa camera lên Rover GNSS. Ban đầu, nhiều người cho rằng đây chỉ là một tính năng mang tính trình diễn công nghệ.<br /> Tuy nhiên, thực tế camera đã mở ra nhiều ứng dụng mới:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhận hiện trạng công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo điểm từ ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout bằng thực tế tăng cường (AR).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại dữ liệu sau khi khảo sát.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này giúp RTK không chỉ cung cấp tọa độ mà còn lưu giữ được bối cảnh thực tế của hiện trường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (2).png" style="width: 680px; height: 678px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Laser Survey – Xu hướng đáng chú ý nhất hiện nay</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu IMU giúp người dùng đo nghiêng và camera giúp ghi nhận hình ảnh, thì Laser Survey đang hướng tới một mục tiêu khác. Đó là đo được những vị trí mà trước đây Rover GNSS khó hoặc không thể tiếp cận.<br /> Hãy hình dung một số tình huống quen thuộc mà anh em có thể gặp khi trực tiếp đo ngoài công trình: <br /> - Mép taluy cao.<br /> - Hồ điều hòa.<br /> - Bờ kênh.<br /> - Hố đào sâu.<br /> - Mái nhà.<br /> - Tường chắn.<br /> - Khu vực đang thi công nguy hiểm.<br /> <br /> Với RTK truyền thống, muốn lấy tọa độ chính xác, người đo thường phải đưa sào đến tận vị trí cần đo. Điều này không phải lúc nào cũng thuận lợi hoặc an toàn. Laser Survey ra đời để giải quyết vấn đề đó. Thay vì đưa anten GNSS đến điểm đo, người sử dụng chỉ cần hướng tia laser đến mục tiêu. Phần mềm sẽ kết hợp dữ liệu từ GNSS, IMU và laser để tính toán tọa độ của điểm cần khảo sát.</span></span><br /> <p data-end="1209" data-start="1006"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tất nhiên, việc đo các vị trí khó tiếp cận bằng tia laser không phải là điều hoàn toàn mới trong ngành đo đạc. Máy toàn đạc điện tử đã sử dụng công nghệ đo không gương (Reflectorless) từ nhiều năm trước. Điểm khác biệt là Laser Survey đang đưa khả năng này lên nền tảng Rover GNSS, cho phép người dùng vừa khai thác ưu thế định vị vệ tinh ngoài hiện trường, vừa thực hiện các phép đo từ xa trong những tình huống mà trước đây thường phải kết hợp thêm máy toàn đạc hoặc các thiết bị khác.</span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lý do nhiều chuyên gia nhận định rằng Laser Survey có thể là một trong những bước phát triển đáng chú ý nhất của Rover GNSS trong những năm gần đây.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/i85-gnss-imu-dual-cameras-laser-land-surveying.jpg" style="width: 472px; height: 354px;" /></span></span></p> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>6. Vì sao các hãng TQ đầu tư mạnh vào hướng đi này?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một lý do quan trọng là thị trường đã thay đổi. Trước đây, người mua thường so sánh:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu kênh vệ tinh?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu tần số?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác bao nhiêu milimet?</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngày nay, người dùng bắt đầu quan tâm nhiều hơn đến các yếu tố như:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Năng suất làm việc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trải nghiệm sử dụng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính linh hoạt ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giải quyết các tình huống thực tế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này khiến các hãng phải chuyển hướng nghiên cứu: không chỉ phát triển bộ thu GNSS tốt hơn, mà còn phải tìm cách giúp người dùng làm việc hiệu quả hơn.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>7. RTK đang dần trở thành nền tảng tích hợp cảm biến</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu quan sát sự phát triển của các thế hệ RTK gần đây, có thể thấy một xu hướng rất rõ. RTK không còn đơn thuần là thiết bị thu tín hiệu vệ tinh mà nó đang trở thành một nền tảng tích hợp nhiều cảm biến:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IMU.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Laser.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công nghệ xử lý hình ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thuật toán tự động hóa và trí tuệ nhân tạo (AI).</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi công nghệ đều nhằm giải quyết một khó khăn cụ thể ngoài công trường.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image(1).png" style="width: 680px; height: 680px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Có thể nói, khi khả năng thu tín hiệu GNSS giữa các thế hệ thiết bị ngày càng tiệm cận nhau, cuộc cạnh tranh của các hãng đang dần chuyển sang một hướng mới: giúp kỹ sư hoàn thành công việc nhanh hơn, an toàn hơn và thuận tiện hơn ngoài thực địa.</span></span> <p data-end="2546" data-start="2275"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera, IMU và Laser Survey có thể chỉ là những bước khởi đầu cho xu hướng đó. Trong tương lai, GNSS RTK nhiều khả năng sẽ không chỉ là thiết bị định vị vệ tinh, mà sẽ trở thành một nền tảng tích hợp nhiều cảm biến phục vụ công tác khảo sát và thi công ngoài hiện trường. </span></span><br /> </p> <h2 data-end="2546" data-start="2275"> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt </strong></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">để được tư vấn và hỗ trợ tốt nhất!</span></h2> ', 'images' => '2026061214390046f6215956d7c46255d00263c715c9d4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng Trung Quốc chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'meta_key' => '', 'meta_des' => 'Khám phá xu hướng phát triển mới của các hãng GNSS RTK như CHCNAV, eSurvey và nhiều thương hiệu khác. Từ IMU, Camera đến Laser Survey, cuộc đua công nghệ đang chuyển từ phần cứng GNSS sang nâng cao trải nghiệm làm việc ngoài thực địa.', 'created' => '2026-06-12', 'modified' => '2026-07-11', 'status' => '1', 'view' => '778', 'slug' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '547', 'rght' => '548', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '817', 'name' => 'Định dạng file RTK: Hướng dẫn xuất, nhập và xử lý lỗi thường gặp trong đo đạc', 'code' => null, 'alias' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.</span></span>', 'content' => '<p> <em><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong thực tế, công việc đo đạc không kết thúc khi Rover báo FIX hoặc khi hoàn thành việc thu thập tọa độ ngoài hiện trường. Sau bước đo đạc, dữ liệu thường phải trải qua nhiều công đoạn như:</span></em><br /> </p> <ul> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển về văn phòng.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biên tập trên AutoCAD hoặc CASS.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý trên Civil 3D, Trimble Business Center (TBC), Leica Infinity.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra trên Google Earth.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển giao cho chủ đầu tư hoặc đơn vị thiết kế.</span></span></em></li> </ul> <br /> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ cần xuất sai định dạng hoặc thiếu dữ liệu, toàn bộ quy trình phía sau có thể bị gián đoạn. Theo tài liệu của Trimble Business Center, hệ sinh thái khảo sát hiện nay hỗ trợ rất nhiều định dạng khác nhau như CSV, TXT, DXF, DWG, KML, SHP, XML, JOB, RINEX... phục vụ các mục đích sử dụng khác nhau.<br /> </span></span></em> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/61sq3Qk7zvL.jpg" style="width: 600px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Các định dạng file dữ liệu phổ biến ở máy RTK</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 CSV (*.csv)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV (Comma Separated Values) là định dạng được sử dụng nhiều nhất trong công tác đo đạc hiện nay. Thông thường file CSV có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số hiệu điểm (Point ID)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Code</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi chú</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ: </strong></u> Point,X,Y,H,Code<br /> P1,234567.123,1234567.456,15.234,COTDIEN</em><br /> <br /> <u><strong>Ưu điểm</strong></u></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở được bằng Excel.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dung lượng nhỏ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ gửi Email, Zalo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ nhập vào Civil 3D, AutoCAD, QGIS, TBC.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><u><strong>Nhược điểm</strong></u></span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có tiêu chuẩn cấu trúc thống nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hai file CSV có thể chứa các trường dữ liệu khác nhau.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Leica Captivate và CHCNAV LandStar, người dùng có thể tự định nghĩa cấu trúc CSV xuất ra bằng cách thêm hoặc bớt các trường dữ liệu cần thiết.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên.png" style="width: 480px; height: 480px;" /> </span></span></p> <p style="text-align: center;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ví dụ về File tọa độ mốc</span></span></em></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 TXT (*.txt)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">TXT là file dữ liệu dạng văn bản thuần và thường được sử dụng khi:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển dữ liệu giữa các phần mềm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập dữ liệu stakeout.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉnh sửa thủ công bằng Notepad hoặc Notepad++.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ưu điểm lớn nhất là khả năng tùy biến cấu trúc dữ liệu.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 DAT (*.dat)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT là định dạng quen thuộc với nhiều đơn vị thành lập bản đồ địa hình với nhiều ứng dụng như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CASS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập bản đồ địa hình.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại Việt Nam, DAT vẫn là định dạng được sử dụng rất nhiều trong công tác đo vẽ địa hình.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 DXF (*.dxf)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF là định dạng trao đổi dữ liệu CAD. Theo Leica Captivate, DXF được sử dụng để chuyển trực tiếp điểm, đường, layer và các đối tượng CAD giữa hiện trường và văn phòng.<br /> <br /> <strong><u>Ưu điểm</u></strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở trực tiếp trên AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không cần nhập tọa độ thủ công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giữ được nhiều thông tin bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5 KML (*.kml)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML là định dạng của Google Earth với nhiều ứng dụng như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra vị trí điểm ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối chiếu dữ liệu khảo sát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ nhanh vị trí công trình.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Trimble, KML/KMZ là một trong những định dạng phổ biến để trao đổi dữ liệu tọa độ địa lý 3D.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.6 SHP (*.shp)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP (Shapefile) là định dạng GIS được sử dụng trong:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">QGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ArcGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống quản lý dữ liệu không gian.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica Captivate còn cho phép xuất thêm các trường chất lượng điểm đo và thông tin tọa độ vào Shapefile.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7 XLS / XLSX</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số phần mềm cho phép xuất trực tiếp sang Excel với ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ chỉnh sửa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ lập bảng tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp cho hồ sơ hoàn công.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Khi nào nên chọn CSV, DAT, DXF hay SHP?</span></span></h2> <br /> <table border="0" cellpadding="0" style="width: 100%"> <tbody> <tr> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mục đích</span></span></strong><br /> </td> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng khuyến nghị</span></span></strong><br /> </td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gửi tọa độ cho chủ đầu tư</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, XLSX</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập AutoCAD</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT, DXF</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập Civil 3D</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Google Earth</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GIS</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout công trình</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ dữ liệu nhanh</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV</span></span></td> </tr> </tbody> </table> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/c64e8674de5294e51c9bd4133e27d964aede72fb_2_1024x516.png" style="width: 600px; height: 302px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Hướng dẫn xuất dữ liệu trên máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù giao diện giữa Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay Matesurvey (Geomate) có khác nhau nhưng quy trình cơ bản tương đối giống nhau với các bước như sau:<br /> <br /> - <strong>Bước 1</strong>: Mở Project hoặc Job cần xuất.<br /> <br /> - <strong>Bước 2</strong>: Kiểm tra danh sách điểm đã lưu.<br /> <br /> - <strong>Bước 3</strong>:Chọn Export Data.<br /> <br /> - <strong>Bước 4</strong>: Chọn định dạng: <em>CSV; ;TXT; DAT; DXF; KML ; SHP</em><br /> <br /> - <strong>Bước 5</strong>: Kiểm tra cấu trúc dữ liệu xuất. Một số phần mềm cho phép tùy chỉnh:<br /> <em>Point ID<br /> Easting<br /> Northing<br /> Elevation<br /> Code<br /> Rod Height<br /> Antenna Height<br /> PDOP<br /> Trạng thái FIX/FLOAT</em><br /> <br /> - <strong>Bước 6</strong>: Lưu file và kiểm tra lại trước khi gửi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Hướng dẫn nhập dữ liệu vào máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài việc xuất dữ liệu từ máy RTK, nhu cầu nhập dữ liệu vào máy để phục vụ công tác bố trí công trình (Stake Out), dẫn đường hoặc kiểm tra tọa độ cũng rất phổ biến. Hiện nay hầu hết các phần mềm đo đạc như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey), MateSurvey (Geomate) đều hỗ trợ nhập các định dạng phổ biến như:CSV (*.csv); TXT (*.txt); DXF (*.dxf). Trong đó CSV là định dạng được sử dụng nhiều nhất.<br /> <br /> <strong>- Bước 1: </strong>Chuẩn bị File dữ liệu<br /> Xuất dữ liệu từ:AutoCAD; Civil 3D; Excel; QGIS; TBC; Leica Infinityvề định dạng CSV hoặc TXT.<br /> <br /> <strong>- Bước 2: </strong>Chép File vào sổ tay<br /> Có thể thực hiện bằngcáp USB, bluetooth, Wi-Fi, đồng bộ Cloud (tùy thiết bị).<br /> <br /> <strong>- Bước 3: </strong>Nhập dữ liệu<br /> Project > Import > Chọn định dạng file > Chọn file cần nhập.<br /> <br /> <strong>- Bước 4: </strong>Khai báo cấu trúc dữ liệu<br /> Đây là bước quan trọng nhất.Người dùng cần khai báo chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Point ID</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Code</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Leica Captivate và Trimble Access, khi nhập dữ liệu cần kiểm tra chính xác thứ tự cột dữ liệu để tránh sai lệch tọa độ.<br /> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Những lỗi thường gặp khi nhập và xuất dữ liệu RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù việc xuất và nhập dữ liệu trên các phần mềm như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay MateSurvey (Geomate) tương đối đơn giản, nhưng thực tế ngoài công trường vẫn thường xuyên phát sinh các lỗi làm mất thời gian xử lý dữ liệu hoặc thậm chí ảnh hưởng đến kết quả thi công.<br /> Dưới đây là những lỗi phổ biến nhất.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.1 Xuất file thành công nhưng mở ra không có dữ liệu</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá nhiều người dùng RTK từng gặp với các biểu hiện như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File được tạo thành công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có tên dự án hoặc tiêu đề file.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có điểm tọa độ bên trong.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường gặp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Project hoặc Job.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Data File.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đang bật bộ lọc dữ liệu (Filter).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai loại điểm cần xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Database không chứa dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Kiểm tra lại Point Database.<br /> - Kiểm tra đúng Project đang làm việc.<br /> - Tắt các bộ lọc dữ liệu trước khi xuất.<br /> - Chọn xuất toàn bộ điểm (All Points).<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.2 File đuôi .CSV mở ra bằng excel nhưng hiển thị trống hoặc sai cột</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biểu hiện thường thấy:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File vẫn có dung lượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel mở được nhưng dữ liệu dồn vào một cột.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tưởng rằng file bị lỗi hoặc mất dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel đọc sai dấu phân cách dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File sử dụng dấu "," trong khi máy tính đang cấu hình dấu ";" hoặc ngược lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mã hóa ký tự (Encoding).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Mở thử bằng Notepad hoặc Notepad++.<br /> - Sử dụng chức năng Import Data / From Text trong Excel.<br /> - Kiểm tra lại dấu phân cách dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.3 CSV của người khác có nhiều cột hơn hoặc ít cột hơn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều người cho rằng CSV là định dạng cố định. Thực tế không phải vậy. Một file CSV có thể chỉ chứa:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point ID ( Số hiệu điểm)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting ( Tọa đọ X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing ( Tọa độ Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation ( Cao độ)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài các trường dữ liệu cơ bản như <strong>Số hiệu điểm, Tọa độ X, Tọa độ Y và Cao độ H</strong>, nhiều phần mềm RTK còn cho phép xuất thêm các thông tin như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mã điểm (Code)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao sào (Rod Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao ăng-ten (Antenna Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số PDOP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm (Fix Status)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc phương vị (Azimuth)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô tả hoặc ghi chú điểm (Description)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân là do cấu hình định dạng xuất dữ liệu của từng phần mềm hoặc từng đơn vị sử dụng. Đây không phải lỗi dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.4 Nhập dữ iệu thành công nhưng điểm nằm sai vị trí</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi nguy hiểm nhất vì rất khó phát hiện nếu không kiểm tra lại.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhầm thứ tự cột X và Y.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục VN-2000.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai đơn vị tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ:</strong></u><br /> Đúng: Point,X,Y,H<br /> P1,234567.123,1234567.456,10.123<br /> <br /> Sai: Point,Y,X,H<br /> P1,1234567.456,234567.123,10.123</em><br /> <br /> Kết quả là điểm có thể xuất hiện cách vị trí thực hàng chục hoặc hàng trăm kilomet.<br /> <br /> <strong>Cách xử lý:</strong><br /> - Kiểm tra lại cấu trúc file.<br /> - Kiểm tra đúng thứ tự Easting và Northing.<br /> - Kiểm tra hệ tọa độ công trình.<br /> - Đối chiếu với một điểm khống chế đã biết.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.5 Nhập dữ liệu thành công nhưng không nhìn thấy điểm</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lúc này máy báo nhập dữ liệu thành công, danh sách điểm vẫn có nhưng không nhìn thấy điểm trên bản đồ.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nằm ngoài phạm vi hiển thị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai Projection.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Zoom Extents.<br /> - Kiểm tra lại hệ tọa độ.<br /> - Kiểm tra lại Projection và KTT.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.6 Nhập dữ liệu định dạng DXF nhưng không hiển thị đối tượng</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lỗi này xảy ra do những nguyên nhân như:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer đang tắt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF không tương thích.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng nằm ngoài vùng hiển thị.</span></span></li> </ul> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cách xử lý:</span></span></strong><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Layer.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thử lưu lại DXF phiên bản thấp hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Zoom Extents để kiểm tra toàn bộ bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> CSV, TXT, DAT, DXF, KML hay SHP đều là những định dạng dữ liệu quan trọng trong công tác đo đạc hiện đại. Không có định dạng nào là "tốt nhất" cho mọi trường hợp. Lựa chọn đúng định dạng xuất dữ liệu sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thời gian xử lý văn phòng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế lỗi chuyển đổi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả phối hợp giữa khảo sát, thiết kế và thi công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm rủi ro mất dữ liệu hoặc bàn giao sai định dạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế hiện nay, CSV vẫn là định dạng phổ biến nhất nhờ tính linh hoạt, dễ sử dụng và khả năng tương thích với hầu hết các phần mềm đo đạc, CAD và GIS.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/588632958_1241954074621445_1455996422080404648_n.jpg" style="width: 747px; height: 420px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '2026060609425746cdab6ee8d08331f2369b4b04a4a4d5.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Định dạng file RTK: CSV, DAT, DXF, KML, SHP và Cách Xuất, Nhập Dữ Liệu', 'meta_key' => '', 'meta_des' => 'Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.', 'created' => '2026-06-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '877', 'slug' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '545', 'rght' => '546', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '816', 'name' => 'Sửa chữa máy thủy bình bị rơi, va đập – Nguyên nhân gây đo sai ngoài công trường', 'code' => null, 'alias' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-–-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> <br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy. Đây được xem như “trái tim” của máy thủy bình tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850337449414_cbf23e5b4edf679eed8636152be1bb10.jpg" style="width: 600px; height: 800px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cụm cân bằng tự động hoạt động theo nguyên lý trọng lực với hệ thống con lắc treo bằng dây cực nhỏ kết hợp cơ cấu giảm dao động từ tính để giữ tia ngắm luôn nằm ngang. Nhờ đó máy có thể tự cân bằng nhanh và cho độ chính xác cao ngoài công trường. Tuy nhiên, cấu tạo này cũng khá nhạy với va đập. Chỉ một cú rơi hoặc vận chuyển mạnh cũng có thể gây các lỗi như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Liệt rung cụm compensator.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhảy rung hoặc kẹt rung.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xoắn hoặc lệch dây treo con lắc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số cao độ tăng bất thường.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế sửa chữa, phần lớn các trường hợp máy thủy bình đo sai sau va đập đều liên quan trực tiếp đến cụm cân bằng tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850429563246_858468dda57655643001cdc5b7476042.jpg" style="width: 600px; height: 800px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Một số dấu hiệu nhận biết máy thủy bình bị sai sau va đập</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi máy thủy bình bị rơi, va đập hoặc vận chuyển mạnh, nếu xuất hiện các dấu hiệu dưới đây thì nên kiểm tra ngay cụm cân bằng tự động bên trong máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả chênh lệch bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng một vị trí nhưng đo nhiều lần ra số khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số rất lớn, thậm chí lệch đến hàng mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy vẫn đọc mia bình thường nhưng cao độ không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi lắc nhẹ máy không còn nghe tiếng rung “roong roong” êm như lúc mới mua.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, cụm con lắc bên trong đã bị:<br /> <br /> • Liệt rung<br /> • Kẹt rung<br /> • Xoắn dây treo<br /> • Hoặc mất khả năng cân bằng tự động<br /> <br /> Điều nguy hiểm là bên ngoài máy vẫn có thể hoạt động “có vẻ bình thường”, khiến người dùng khó phát hiện nếu không kiểm tra sai số trước khi thi công. Vì vậy, sau mỗi lần máy bị va đập, nên kiểm tra sai số góc i hoặc test đo đi – đo về trước khi tiếp tục sử dụng ngoài công trường.<br /> <br /> Khuyến nghị sau khi thiết bị bị va đập:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy và ốc cân bằng bằng cách quay máy 180° để quan sát độ dịch chuyển bọt thủy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai số góc i bằng phương pháp hai mia hoặc thử nghiệm đối chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không tiếp tục đo công trình khi chưa xác định chính xác tình trạng thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì chỉ một máy bị lệch cũng có thể truyền sai số cho toàn bộ số liệu ngoài công trường.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (6).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 420px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Qui trình sửa chữa máy thủy bình tại Trắc địa Thành Đạt</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bước 1: Tiếp nhận và kiểm tra tổng thể thiết bị.<br /> Bước 2: Kiểm tra cụm treo con lắc và cụm cân bằng tự động.<br /> Bước 3: Báo lỗi, báo giá sửa chữa và hiệu chỉnh.<br /> Bước 4: Cân chỉnh cụm compensator — công đoạn quan trọng nhất.<br /> Bước 5: Hiệu chỉnh sai số góc i.<br /> Bước 6: Kiểm tra thực địa sau sửa chữa.<br /> Bước 7: Dán tem kiểm nghiệm trước khi bàn giao cho khách hàng.<br /> <br /> Một máy thủy bình bị lệch không chỉ làm sai một điểm đo… mà có thể truyền sai số cho toàn bộ tuyến hoặc số liệu ngoài công trường.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Q&A - Kiểm tra máy thủy bình/ thủy chuẩn sau khi bị rơi, va đập</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy thủy bình bị rơi/ va đập có cần kiểm tra lại không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Đây là bước rất quan trọng trước khi tiếp tục thi công vì chỉ một sai lệch nhỏ trên máy thủy bình cũng có thể ảnh hưởng đến toàn bộ số liệu cao độ ngoài công trường. Nhiều trường hợp máy vẫn đọc mia bình thường nhưng thực tế tia ngắm đã bị sai lệch sau va đập.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi bị rơi máy thủy bình thường gặp những lỗi gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số lỗi phổ biến gồm:<br /> • Lệch bọt thủy.<br /> • Sai số góc i lớn.<br /> • Liệt rung hoặc nhảy rung cụm cân bằng tự động.<br /> • Nhìn mia hoặc mục tiêu không rõ.<br /> • Hư ốc cân bằng, vi động hoặc đế máy.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình bị lệch bọt thủy?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường do vận chuyển không đúng cách hoặc máy bị tác động mạnh khiến hệ thống cân bằng thay đổi vị trí, dẫn đến máy khó cân bằng hoặc cân bằng nhưng số đo không ổn định.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sai số góc i trên máy thủy bình là gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i là tình trạng tia ngắm không còn nằm ngang chuẩn. Khi đó đo đi – đo về có thể cho kết quả khác nhau và sai số cao độ tăng bất thường. Đây là lỗi rất phổ biến sau khi máy thủy bình bị va đập.</span></span></p> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Sai số góc i.png" style="width: 665px; height: 295px;" /></h3> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>“Liệt rung” hoặc “nhảy rung” là gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi liên quan đến cụm cân bằng tự động (Automatic Compensator) bên trong máy thủy bình. Cụm con lắc bên trong có thể bị: đứt dây treo, xoắn dây, kẹt rung hoặc lệch cơ cấu giảm dao động từ tính. <br /> Khi đó máy không còn tự cân bằng chính xác dù vẫn có thể đọc mia bình thường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850459087569_e24952711404d15f27d74612fb6b68f7.jpg" style="width: 460px; height: 219px;" /></span></span></p> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Dây rung máy thủy bình</em></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình nhìn mia không rõ sau va chạm?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân có thể do:<br /> <br /> • Kính bị bẩn hoặc trầy xước.<br /> • Hệ thống lấy nét bị ảnh hưởng.<br /> • Cụm quang học bị lệch sau va đập.<br /> <br /> Nếu không kiểm tra sớm có thể ảnh hưởng trực tiếp đến độ chính xác đo đạc.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy bị hư ốc cân bằng hoặc đế máy có nghiêm trọng không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Nếu máy bị rơi mạnh, các bộ phận cơ khí như: vi động, ốc cân bằng, đế máy… có thể bị cong, nứt hoặc biến dạng khiến việc cân bằng và đo đạc không còn chính xác như ban đầu.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi máy thủy bình bị rơi nên làm gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy, kiểm tra sai số góc i và cụm con lắc tự động trước khi tiếp tục đo công trình. </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm để tránh truyền sai số cho toàn bộ số liệu thi công. </span></p> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <strong style="margin: 0px; padding: 0px; font-weight: bold;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><a href="https://zalo.me/0913051734">Trắc Địa Thành Đạt</a> – Cung cấp máy thủy bình chính hãng!</span></span></strong></p> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Hotline: <strong style="margin: 0px; padding: 0px; font-weight: bold;">0913 051 734 / 0942 288 388</strong></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Địa chỉ: 145 Láng Hạ – Đống Đa – Hà Nội<br style="margin: 0px; padding: 0px;" /> Fanpage: Trắc Địa Thành Đạt</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '20260521180410f10bb16a2b4a9dbcb155bfe047377890.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Sửa Chữa Máy Thủy Bình Bị Rơi, Va Đập – Nguyên Nhân Gây Đo Sai & Cách Khắc Phục!', 'meta_key' => '', 'meta_des' => 'Máy thủy bình bị rơi, va đập dễ gây liệt rung, nhảy rung, sai số góc i và đo cao độ sai. Tìm hiểu nguyên nhân, dấu hiệu nhận biết và quy trình sửa chữa – hiệu chỉnh máy thủy bình tại Trắc Địa Thành Đạt.', 'created' => '2026-05-21', 'modified' => '2026-07-12', 'status' => '1', 'view' => '910', 'slug' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '543', 'rght' => '544', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '815', 'name' => 'Đo hầm bằng máy toàn đạc: So sánh Tunnel App Leica và giải pháp của các hãng khác', 'code' => null, 'alias' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi nói đến đo hầm bằng máy toàn đạc, thách thức lớn nhất không nằm ở thao tác đo… mà ở việc kiểm soát sai số và tiến độ thi công ngay tại hiện trường.</span></span>', 'content' => '<p> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong các công trình hầm, metro hoặc hạ tầng ngầm, đo hầm bằng máy toàn đạc là phương pháp gần như bắt buộc do không thể sử dụng GNSS. </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tuy nhiên, thách thức lớn nhất không nằm ở việc đo được điểm, mà là kiểm soát sai số và phát hiện sai lệch kịp thời ngay tại hiện trường. Nếu sai số chỉ được phát hiện sau khi xử lý dữ liệu tại văn phòng, việc hiệu chỉnh sẽ trở nên tốn kém và ảnh hưởng trực tiếp đến tiến độ thi công. </span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chính vì vậy, các hãng thiết bị trắc địa đã phát triển nhiều giải pháp khác nhau nhằm hỗ trợ kỹ sư kiểm soát tốt hơn trong quá trình đo hầm.</span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Tunnel App trên máy toàn đạc Leica FlexLine</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 Tunnel App là gì?</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tunnel App là module phần mềm tích hợp trong hệ điều hành FlexField trên các dòng máy toàn đạc Leica FlexLine như TS03 và TS07.<br /> <br /> Ứng dụng này cho phép người dùng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nạp dữ liệu thiết kế tuyến và biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực hiện stakeout trực tiếp ngoài hiện trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo profile và kiểm tra đào – đắp (cut & fill)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh sai lệch với thiết kế ngay trên máy</span></span></li> </ul> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.2 Ưu điểm của Tunnel App</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với phương pháp đo truyền thống, Tunnel App mang lại một số lợi ích rõ rệt:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thao tác trung gian giữa hiện trường và văn phòng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hiển thị sai lệch trực quan theo biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ phát hiện sai số ngay trong quá trình đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng tốc độ thi công và kiểm tra</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nổi bật của Leica là khả năng tích hợp toàn bộ workflow ngay trên thiết bị, phù hợp với các công trình cần triển khai nhanh ngoài hiện trường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Quy trình đo hầm ngoài công trường</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị của Leica, Trimble, Topcon hay các hãng khác, quy trình đo hầm bằng máy toàn đạc ngoài công trường về bản chất vẫn tuân theo một nguyên tắc chung: t<strong>hiết lập đúng – bố trí đúng – kiểm tra liên tục.</strong><br /> <br /> Bước đầu tiên và quan trọng nhất là <strong>thiết lập trạm máy</strong>. Kỹ sư trắc địa cần đặt máy tại vị trí khống chế đã biết tọa độ và định hướng bằng phương pháp <strong>backsight hoặc resection</strong>. Độ chính xác của bước này có ảnh hưởng trực tiếp đến toàn bộ tuyến hầm, bởi chỉ cần sai lệch nhỏ ở định hướng ban đầu cũng có thể dẫn đến sai số tích lũy theo chiều dài công trình.<br /> <br /> Sau khi trạm máy được thiết lập chính xác, dữ liệu thiết kế sẽ được nạp vào hệ thống. Các thông tin bao gồm tim tuyến (alignment), lý trình và biên dạng hầm (cross-section) đóng vai trò làm cơ sở để thực hiện stakeout ngoài thực địa. Ở giai đoạn này, việc kiểm tra lại hệ tọa độ, đơn vị và hướng tuyến là cần thiết nhằm tránh các sai sót do nhập liệu hoặc chuyển đổi dữ liệu.<br /> <br /> Trong quá trình thi công, các điểm đặc trưng của biên dạng hầm sẽ được bố trí trực tiếp ngoài hiện trường thông qua máy toàn đạc. Người đo sẽ lần lượt xác định vị trí các điểm theo thiết kế và hướng dẫn thi công đào hầm theo đúng hình học yêu cầu. Tuy nhiên, việc “bố trí đúng” chưa phải là bước cuối cùng.<br /> <br /> Khâu kiểm tra mới là yếu tố quyết định chất lượng. Các điểm sau khi bố trí cần được đo lại và so sánh với thiết kế bằng các phép đo lặp hoặc thông qua các công cụ kiểm tra trên máy. Việc này giúp phát hiện sớm các sai lệch về vị trí, cao độ hoặc hình dạng biên dạng hầm, từ đó kịp thời điều chỉnh trước khi sai số bị tích lũy.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/LGS_streamline_tunnel_construction_and_maintenance_2480x750.jpg" style="width: 800px; height: 242px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế, nhiều sai số lớn trong thi công hầm không đến từ thiết bị, mà đến từ việc không kiểm tra hoặc kiểm tra quá muộn. Vì vậy, một quy trình đo hầm hiệu quả luôn phải đảm bảo nguyên tắc: đo đến đâu, kiểm tra đến đó.<br /> <br /> Sự khác biệt giữa các hãng thiết bị hiện nay chủ yếu nằm ở mức độ hỗ trợ người dùng trong từng bước của quy trình này. Tuy nhiên, dù sử dụng công nghệ nào, cốt lõi của đo hầm bằng máy toàn đạc vẫn không thay đổi: <strong>Thiết lập chuẩn – dữ liệu đúng – kiểm tra liên tục.</strong></span></span> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. So sánh các giải pháp đo hầm của các hãng</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Leica – All-in-one tại hiện trường</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica là hãng đi theo hướng tích hợp toàn bộ quy trình đo hầm vào một ứng dụng duy nhất. Tunnel App giúp người dùng thực hiện liên tục các bước từ nạp dữ liệu, bố trí đến kiểm tra ngay tại hiện trường mà không cần phụ thuộc nhiều vào xử lý hậu kỳ.<br /> Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình thi công nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đội thi công cần thao tác đơn giản, trực quan.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica App Tunnel 3.jpg" style="width: 800px; height: 428px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Trimble – Hệ sinh thái và xử lý thiết kế</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trimble sử dụng phần mềm Trimble Access kết hợp với module Tunnels chuyên dụng. Giải pháp này tập trung vào khả năng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý alignment phức tạp</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối với phần mềm thiết kế như TBC</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý dữ liệu trong các dự án lớn</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự án metro, hầm quy mô lớn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu đồng bộ BIM</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Trimple tunnel.jpg" style="width: 800px; height: 446px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Topcon – Linh hoạt theo workflow</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không giống Leica, <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu-topcon-gm-50-series.html">Topcon</a> không phát triển một module “Tunnel App” riêng biệt cho dòng máy toàn đạc. Thay vào đó, hãng lựa chọn hướng tiếp cận linh hoạt hơn thông qua phần mềm <strong>MAGNET Field</strong>. Trong thực tế, công tác đo hầm bằng máy toàn đạc Topcon được thực hiện bằng cách kết hợp nhiều chức năng sẵn có như alignment, stakeout, offset và kiểm tra profile.<br /> <br /> <strong>Workflow điển hình trên Topcon</strong><br /> <br /> Người dùng sẽ bắt đầu bằng việc nạp dữ liệu tuyến (alignment) và các thông số thiết kế vào phần mềm. Sau khi thiết lập trạm máy, quá trình stakeout được thực hiện thông qua các điểm tuyến và các khoảng lệch (offset) theo biên dạng hầm. <br /> Đối với kiểm tra hình học, kỹ sư thường đo lại các điểm trên biên dạng thực tế và so sánh với thiết kế thông qua các công cụ kiểm tra trong phần mềm hoặc xử lý hậu kỳ.<br /> <br /> <strong>Ưu điểm của cách tiếp cận này</strong><br /> <br /> Điểm mạnh lớn nhất của Topcon là tính linh hoạt. Người dùng có thể tùy biến quy trình đo theo từng loại công trình mà không bị giới hạn bởi một module cố định. Điều này đặc biệt hữu ích trong các dự án có yêu cầu đặc thù hoặc khi dữ liệu thiết kế không theo một chuẩn cố định.<br /> <br /> <strong>Hạn chế cần lưu ý</strong><br /> <br /> Tuy nhiên, việc không có một module tunnel chuyên dụng cũng đồng nghĩa với việc:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy trình đo phụ thuộc nhiều vào kinh nghiệm người sử dụng,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc kiểm tra sai số không trực quan bằng các hệ thống tích hợp,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần hiểu rõ workflow để tránh sai sót trong quá trình triển khai.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nói cách khác, Topcon không làm “ít hơn”, nhưng yêu cầu người dùng phải “hiểu nhiều hơn”.</span></span><br /> <br /> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel.jpg" style="text-align: center; font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 800px; height: 533px;" /></h3> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.4 Nikon / Sokkia – Phương pháp truyền thống</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các dòng máy của Nikon và Sokkia chủ yếu sử dụng phương pháp truyền thống:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout cơ bản</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo và kiểm tra thủ công</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giải pháp này vẫn đáp ứng tốt các công trình quy mô nhỏ, nhưng hạn chế khi cần xử lý các dự án phức tạp.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Sự khác biệt cốt lõi trong đo hầm và yếu tố ảnh hưởng tới độ chính xác</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm khác biệt quan trọng nhất giữa các giải pháp không nằm ở khả năng đo, mà nằm ở thời điểm phát hiện sai số.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp truyền thống: phát hiện sai sau khi đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm tích hợp (Tunnel App, Tunnels Module): phát hiện sai ngay trong quá trình đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc phát hiện sai số sớm giúp giảm chi phí hiệu chỉnh và hạn chế rủi ro trong thi công.<br /> </span></span> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Những yếu tố ảnh hưởng đến độ chính xác</strong></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị hay phần mềm nào, độ chính xác trong đo hầm vẫn phụ thuộc vào:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định hướng trạm máy (backsight)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện môi trường ảnh hưởng đến đo EDM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số truyền tọa độ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kỹ năng và thao tác của người sử dụng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các phần mềm hiện đại chỉ đóng vai trò hỗ trợ, không thể thay thế hoàn toàn quy trình kiểm soát kỹ thuật ngoài công trường.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel 2.jpg" style="width: 800px; height: 415px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Đo hầm bằng máy toàn đạc đã có sự chuyển dịch rõ rệt từ phương pháp thủ công sang các giải pháp tích hợp và trực quan hơn. Tunnel App của Leica là một ví dụ điển hình cho xu hướng đưa việc kiểm soát sai số xuống ngay tại hiện trường. Trong khi đó, các hãng khác như Trimble, Topcon hay Nikon lựa chọn những hướng tiếp cận khác nhau, phù hợp với từng loại công trình và nhu cầu sử dụng.<br /> Tuy nhiên, yếu tố quan trọng nhất vẫn là: Hiểu đúng quy trình đo và chủ động kiểm soát sai số trong suốt quá trình thi công<br /> <br /> Nếu bạn cần tư vấn lựa chọn máy toàn đạc hoặc giải pháp đo hầm phù hợp với công trình, liên hệ ngay với chúng tôi!<br /> <br /> <span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt – Luôn đồng hành cùng bạn!</strong></span><br /> </span></span>', 'images' => '202604231558382137741e17c2868ead929b32a270f9f6.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Đo hầm bằng máy toàn đạc: Leica Tunnel App và các hãng khác', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách đo hầm bằng máy toàn đạc Leica với Tunnel App và so sánh với Trimble, Topcon, Nikon. Quy trình, ưu nhược điểm và cách kiểm soát sai số ngoài công trường.', 'created' => '2026-04-23', 'modified' => '2026-07-12', 'status' => '1', 'view' => '1482', 'slug' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '541', 'rght' => '542', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '814', 'name' => 'Máy toàn đạc điện tử: ĐO CHUẨN – BỐ TRÍ NHANH – ỔN ĐỊNH NGOÀI CÔNG TRƯỜNG!', 'code' => null, 'alias' => 'may-toan-dac-dien-tu-do-chuan-–-bo-tri-nhanh-–-on-dinh-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> Tại <strong>Trắc Địa Thành Đạt</strong>, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> <br /> Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Vì sao máy toàn đạc vẫn là thiết bị không thể thay thế?</span></span></h2> <br /> <p data-end="216" data-start="105"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong điều kiện thi công thực tế tại Việt Nam, nhiều khu vực thường gặp hạn chế về khả năng đo GNSS, chẳng hạn:</span></span></p> <ul data-end="407" data-start="218"> <li data-end="296" data-section-id="3ju1r3" data-start="218"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không gian bị che khuất bởi nhà cao tầng, công trình dày đặc hoặc tầng hầm</span></span></li> <li data-end="337" data-section-id="k3xm0j" data-start="297"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu vệ tinh yếu hoặc nhiễu mạnh</span></span></li> <li data-end="407" data-section-id="utqol9" data-start="338"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Yêu cầu độ chính xác cao đến milimet trong quan trắc và hoàn công.</span></span></li> </ul> <p data-end="491" data-start="409"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong những trường hợp này, máy toàn đạc vẫn là giải pháp hiệu quả và ổn định nhờ:</span></span></p> <ul data-end="665" data-start="493"> <li data-end="553" data-section-id="1rjirb8" data-start="493"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng đo khoảng cách chính xác cao bằng công nghệ EDM</span></span></li> <li data-end="594" data-section-id="1tziawf" data-start="554"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phụ thuộc vào tín hiệu vệ tinh</span></span></li> <li data-end="665" data-section-id="rakyqa" data-start="595"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm soát chặt chẽ công tác bố trí điểm và thi công ngoài thực địa.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hai chức năng cốt lõi của máy toàn đạc</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 Đo điểm (Measurement)</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là chức năng cơ bản và quan trọng nhất của máy toàn đạc trong công tác khảo sát. Máy thực hiện đo các yếu tố hình học gồm:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc ngang (Horizontal Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc đứng (Vertical Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách (EDM – Electronic Distance Measurement)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ các giá trị này, hệ thống sẽ tính toán và xác định tọa độ không gian của điểm đo dưới dạng (X, Y, Z).<br /> <br /> Ngoài ra, máy toàn đạc hiện đại còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo không gương (Non-prism) trong điều kiện khó tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu trữ và quản lý dữ liệu điểm đo trực tiếp trên máy</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xuất dữ liệu phục vụ xử lý nội nghiệp (CAD, TBC, Civil 3D…)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát địa hình, đo vẽ bản đồ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo hiện trạng công trình, kiểm tra kích thước</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lập lưới khống chế và thu thập dữ liệu phục vụ thiết kế</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica-Nova-TS60-BC-facing-right.jpg" style="width: 750px; height: 258px;" /></span></span><span style="display: none;"> </span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 Bố trí điểm (Stakeout)</span></span></h3> <p data-end="1067" data-start="941"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí điểm là quá trình chuyển thông tin từ bản vẽ thiết kế ra vị trí ngoài thực địa, đóng vai trò quan trọng trong thi công.</span></span></p> <p data-end="1114" data-start="1069"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựa trên tọa độ thiết kế, hệ thống thực hiện:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh tọa độ thiết kế với vị trí thực tế của gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán sai lệch theo các phương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn người đo di chuyển theo các chỉ dẫn:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trái / phải</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tiến / lùi</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lên / xuống</span></span></li> </ul> </li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhờ đó, điểm ngoài thực địa được đưa về đúng vị trí thiết kế với độ chính xác cao.<br /> <br /> Ngoài ra, các dòng máy hiện nay còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí tuyến, cung tròn (Road / Arc stakeout)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí theo lưới, theo tim trục</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai lệch sau thi công (As-built check)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định vị tim trục công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí móng, cột, dầm, sàn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thi công hạ tầng, giao thông, công trình kỹ thuật</span></span></li> </ul> <h2 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/image (11).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 660px; height: 371px;" /></h2> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Những lỗi đo cạnh thường gặp và cách xử lý</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Nguyên lý đo cạnh của máy toàn đạc</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc xác định khoảng cách bằng cách:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát tín hiệu laser hoặc hồng ngoại đến gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận tín hiệu phản xạ quay về</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán khoảng cách dựa trên thời gian truyền (Time of Flight) hoặc độ lệch pha (Phase Measurement).</span></span></li> </ul> </li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các hãng như Leica, Topcon, Nikon hay Trimble đều sử dụng nguyên lý này, chỉ khác nhau về công nghệ xử lý tín hiệu và thuật toán nội bộ.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Các nguyên nhân gây lỗi đo cạnh</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.1 Suy giảm hệ đo EDM<br /> <br /> Đây là nguyên nhân phổ biến nhất trong thực tế. Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo lặp lại cho kết quả khác nhau</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách “nhảy số”, không ổn định</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Linh kiện EDM xuống cấp theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát yếu hoặc bộ thu tín hiệu kém</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Làm việc trong điều kiện ánh sáng mạnh hoặc phản xạ kém</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo tài liệu của Leica Geosystems, độ chính xác đo cạnh phụ thuộc lớn vào cường độ tín hiệu phản xạ và điều kiện môi trường.<br /> <br /> 3.2.2 Lệch trục EDM – trục ngắm (Collimation error)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo gần tương đối đúng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo xa sai lệch tăng dần</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bị va đập, rung lắc trong quá trình sử dụng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lâu không hiệu chuẩn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai lệch cơ khí tích lũy</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số này ảnh hưởng rõ rệt khi đo khoảng cách lớn, đặc biệt trong các công trình yêu cầu độ chính xác cao.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lỗi đo cạnh ( trục) 2.png" style="width: 680px; height: 295px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.3 Sai hằng số gương (Prism constant)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số gần như cố định trên mọi khoảng cách</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng sai loại gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai giá trị hằng số gương (0, -30, +17.5 mm…)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Trimble, việc thiết lập đúng prism constant là điều kiện bắt buộc để đảm bảo độ chính xác đo cạnh.<br /> <br /> 3.2.4 Ảnh hưởng môi trường đo<br /> <br /> Các yếu tố môi trường có thể ảnh hưởng đáng kể đến kết quả đo:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiệt độ và áp suất (P/T)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiễu khí quyển</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bề mặt phản xạ kém (tường sơn tối, bề mặt ướt, kim loại)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo khuyến nghị của FIG, sai số EDM tăng lên đáng kể trong điều kiện khí quyển không ổn định.<br /> <br /> 3.2.5 Sai số do thao tác người dùng<br /> <br /> Đây là nhóm lỗi rất phổ biến ngoài công trường.Bao gồm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựng sào không thẳng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai chiều cao gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập sai trạm máy hoặc điểm định hướng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình hệ tọa độ không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số do người dùng thường khó nhận biết nếu không có quy trình kiểm tra chéo.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Cách khắc phục</span></span></h3> <br /> <ul> <li data-end="2098" data-section-id="zvrhg8" data-start="2066"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra EDM, 2C, MO định kỳ</span></span></li> <li data-end="2130" data-section-id="uu2tiv" data-start="2099"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng đúng prism constant</span></span></li> <li data-end="2172" data-section-id="nwvnt0" data-start="2131"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm tra cạnh chuẩn trước thi công</span></span></li> <li data-end="2209" data-section-id="ux2ibp" data-start="2173"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh đo trong điều kiện bất lợi</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Các dòng máy toàn đạc phổ biến</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Leica</strong><br /> <br /> Leica là thương hiệu cao cấp trong lĩnh vực trắc địa, nổi bật với độ chính xác và độ ổn định lâu dài. Hệ EDM mạnh, khả năng làm việc tốt trong nhiều điều kiện môi trường khác nhau, đặc biệt phù hợp với các công trình yêu cầu kỹ thuật cao.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao, ổn định theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ EDM mạnh, ít bị ảnh hưởng bởi môi trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm và thuật toán xử lý tốt</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình cao tầng, cầu đường, quan trắc, dự án yêu cầu kiểm soát sai số chặt chẽ.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Leica toàn đạc.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Topcon</strong><br /> <br /> Topcon là dòng máy phổ biến nhờ sự cân bằng giữa hiệu năng và chi phí. Thiết bị dễ sử dụng, độ bền tốt, đáp ứng đa dạng nhu cầu thi công ngoài công trường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, thao tác nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ ổn định tốt trong điều kiện công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chi phí hợp lý</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, hạ tầng, thi công phổ thông.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z6599539340575_12c3eac505cba39e86905990604ee094.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nikon</strong><br /> <br /> Nikon là lựa chọn phù hợp cho các đơn vị cần thiết bị đo đạc cơ bản với chi phí đầu tư thấp. Thiết kế đơn giản, dễ tiếp cận và đáp ứng tốt các công việc đo đạc thông thường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giá tốt, dễ tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, phù hợp người mới</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền ổn định</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, khảo sát cơ bản.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/DTM 352 Nikon 2.jpg" style="width: 680px; height: 509px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Sokkia</strong><br /> <br /> Sokkia có cùng hệ sinh thái với Topcon, nổi bật về độ bền và khả năng làm việc ổn định trong điều kiện công trường khắc nghiệt. Thiết bị được đánh giá cao về tính “lành”, ít lỗi vặt.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền cao, ổn định lâu dài</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động tốt trong môi trường khắc nghiệt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác đáp ứng tốt thi công</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình hạ tầng, công trường làm việc cường độ cao.<br /> <br /> <strong>Trimble</strong><br /> <br /> Trimble tập trung mạnh vào giải pháp tích hợp và hệ sinh thái phần mềm. Các dòng máy toàn đạc của Trimble nổi bật ở khả năng kết nối, xử lý dữ liệu và làm việc đồng bộ với GNSS.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ sinh thái phần mềm mạnh (Access, TBC…)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tích hợp GNSS và quản lý dữ liệu tốt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp quy trình làm việc hiện đại</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Dự án lớn, doanh nghiệp cần đồng bộ dữ liệu và quản lý thi công<br /> <br /> > Mỗi thương hiệu đều có định hướng và thế mạnh riêng. Việc lựa chọn nên dựa trên nhu cầu thực tế, điều kiện công trường và yêu cầu kỹ thuật của từng dự án để đạt hiệu quả tối ưu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cách chọn máy toàn đạc phù hợp công trình</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc lựa chọn máy toàn đạc cần dựa vào yêu cầu kỹ thuật và điều kiện thi công thực tế, thay vì chỉ nhìn vào thương hiệu hoặc giá thành.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình dân dụng, hạ tầng cơ bản</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với các dòng Nikon hoặc Topcon nhờ dễ sử dụng, độ ổn định tốt và chi phí hợp lý. Đáp ứng hiệu quả cho các công việc đo đạc, bố trí thông thường.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu độ chính xác cao</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên ưu tiên Leica hoặc các dòng cao cấp, với độ chính xác và độ ổn định cao, phù hợp cho nhà cao tầng, kết cấu thép hoặc các hạng mục cần kiểm soát sai số chặt chẽ.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quan trắc, kiểm soát biến dạng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lựa chọn máy có độ chính xác cao và hệ EDM ổn định, đảm bảo khả năng lặp lại kết quả trong nhiều chu kỳ đo.<br /> <br /> Nguyên tắc quan trọng: Lựa chọn đúng thiết bị theo nhu cầu thực tế sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm sai số trong đo đạc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tối ưu chi phí đầu tư</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nâng cao hiệu quả thi công</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo chất lượng công trình</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Tại sao nên mua máy toàn đạc tại Trắc địa Thành Đạt?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi cung cấp đa dạng các loại máy toàn đạc của các hãng <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu">Leica</a>, Nikon, Topcon, đáp ứng nhiều nhu cầu khác nhau trong thi công và khảo sát.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tư vấn đúng nhu cầu công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ kỹ thuật ngoài công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn sử dụng, kiểm tra sai số</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cung cấp thiết bị chính hãng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> Bạn đang phân vân giữa các dòng máy toàn đạc? Hoặc gặp lỗi đo cạnh ngoài công trường?<br /> <br /> >>> Liên hệ ngay <a href="https://zalo.me/0913051734"><strong>Trắc Địa Thành Đạt</strong></a> để được tư vấn phù hợp nhất! </span></span>', 'images' => '20260505102744e930c0e340a0ba993987b0238086413c.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử: Báo giá, tư vấn chọn máy chuẩn công trình!', 'meta_key' => '', 'meta_des' => 'Tìm hiểu máy toàn đạc điện tử, cách chọn máy phù hợp công trình. Tư vấn thiết bị chính hãng tại Trắc Địa Thành Đạt!', 'created' => '2026-04-20', 'modified' => '2026-07-11', 'status' => '1', 'view' => '6424', 'slug' => 'may-toan-dac-dien-tu-do-chuan-bo-tri-nhanh-on-dinh-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '539', 'rght' => '540', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $tinlq = array( (int) 0 => array( 'Post' => array( 'id' => '644', 'name' => 'GNSS RTK', 'code' => null, 'alias' => 'gnss-rtk', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; border: 0px; background-image: initial; background-position: 0px 0px; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; outline: 0px; vertical-align: top; color: rgb(0, 0, 0); font-size: 14px; text-align: justify; font-weight: 700 !important;">GNSS RTK</span><span style="color: rgb(0, 0, 0); font-size: 14px; text-align: justify;"> được biết đến là thiết bị dùng trong công tác trắc địa giúp hỗ trợ quá trình khảo sát địa hình. Với khả năng tự động vẽ và lưu lại các khu vực khảo sát giúp nhanh chóng hoàn thiện các bản vẽ đầy đủ, chính xác với các thông số kỹ thuật cần thiết. Đây là thiết bị hỗ trợ đắc lực cho những người làm công tác trắc địa để có thể hoàn thành công việc nhanh chóng, tiết kiệm thời gian và chi phí với độ chính xác cao.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường hiện nay có rất nhiều dòng máy GNSS RTK với sự đa dạng về kiểu dáng thiết kế, các tính năng cũng như kích thước cho khách hàng lựa chọn. Với mỗi sản phẩm sẽ có những đặc tính cũng như công năng riêng phù hợp với nhu cầu sử dụng của từng đối tượng khách hàng cũng như tính chất công việc. Cùng tìm hiểu ưu và nhược điểm của máy GNSS RTK để có cái nhìn tổng quan về nó trước khi bạn lựa chọn đầu tư cho dự án của mình.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <strong>Ưu điểm nổi bật của máy GNSS RTK </strong><br /> <br /> Đảm bảo độ chính xác cao nhất trong quá trình làm việc. Đối với công tác trắc địa thì độ chính xác là thông số quan trọng nhất cần hướng tới trong quá trình làm việc do đó các thiết bị hỗ trợ cũng cần tối ưu hóa được yếu tố này. Với việc áp dụng công nghệ RTK cũng như CORS Network các mẫu máy này đảm bảo mang đến các thông số chuẩn nhất để cung cấp dữ liệu cho quá trình vẽ cũng như hình thành các dữ liệu chung.<br /> <br /> Trong việc sử dụng công nghệ GNSS thì CORS là trạm tham chiếu hoạt động liên tục để tạo sự liên kết các thiết bị với đường truyền tín hiệu. Công nghệ này giúp khoảng cách tối đa giữa trạm gốc và máy định vị GNSS được thiết lập khoảng 10 - 15km, giúp tăng khoảng cách cho hoạt động của máy. Điều này giúp giảm nhân công cũng như chi phí trong quá trình làm việc.<br /> <br /> Với thiết kế nhỏ gọn, dễ dàng di chuyển giúp mang đến sự tiện lợi tối đa trong quá trình sử dụng. <br /> <br /> Một ưu điểm phải kế đến của loại máy GNSS RTK đó là việc tích hợp nhiều tính năng thông minh trong cùng thiết bị. Các tính năng điều khiển bằng giọng nói, bảng điều khiển điện tử, việc thay đổi kích thước máy được tích hợp …giúp dễ dàng sử dụng cũng như có thể thực hiện được nhiều chức năng khác nhau cùng lúc.<br /> <br /> Bộ nhớ trong lớn giúp tăng khả năng lưu trữ thông tin cùng với đó là khả năng kết nối với máy tính, điện thoại, bluetooth hay 3G, 4G giúp nâng cao tối đa được các công năng cũng như sự tiện lợi trong quá trình sử dụng.<br /> <br /> Khả năng kết nối với các thiết bị khác tối ưu cùng với hệ thống CORS.<br /> <br /> Với chất liệu cao cấp có khả năng chống va đập cũng như hạn chế tối đa các tác động của các yếu tố bên ngoài giúp mang đến sản phẩm bền đẹp lâu dài theo thời gian sử dụng.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/phân phối máy định vị vệ tinh 2 tần số rtk (1).png" style="width: 850px; height: 604px;" /><br /> <br /> <strong>Nhược điểm của máy GNSS RTK</strong><br /> <br /> Hiện nay, máy GPS –GNSS RTK chất lượng dù đã được tích hợp đầy đủ các tính năng nhưng để có được độ chính xác tuyệt đối cùng với vi</span>ệc</span> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">thực hiện thêm nhiều công việc khác các bạn cần phải có sự kết nối thêm các thiết bị khác để sử dụng.<br /> <br /> Giới hạn làm việc của máy trong một phạm vi nhất định cũng là một khó khăn trong quá trình sử dụng. Do đó, cần tìm hiểu đầy đủ các thông số của máy trước khi lựa chọn để phù hợp với đặc điểm công việc.<br /> <br /> Giá thành cao cũng là một nhược điểm cần tính đến khi quyết định đầu tư. <br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Máy RTK.png" style="width: 850px; height: 680px;" /><br /> <br /> </span></span>', 'images' => '2021081816133230412c34d3b16d2ec66a3d1eba4d0d89.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Máy RTK, máy định vị vệ tinh RTK, máy GPS RTK, máy định vị vệ tinh GNSS RTK, máy RTK giá rẻ, máy RTK tốt nhất', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-18', 'modified' => '2026-07-12', 'status' => '1', 'view' => '20547', 'slug' => 'gnss-rtk', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '231', 'rght' => '232', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '641', 'name' => 'Phần mềm LandStar 7 và cách cài đặt trên máy tính', 'code' => null, 'alias' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LandStar 7 là một ứng dụng miễn phí được phát triển bởi www.chcnav.com, thuộc danh mục Bản đồ và dẫn đường. </span></span>', 'content' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="294" src="https://www.youtube.com/embed/04hr6Gy-3RE" title="YouTube video player" width="680"></iframe><br /> <br /> LandStar7 là giải pháp phần mềm khảo sát đã được kiểm chứng thực địa mới nhất dành cho mọi thiết bị Android và bộ điều khiển dữ liệu CHCNAV. Được thiết kế cho các nhiệm vụ khảo sát và lập bản đồ có độ chính xác cao, LandStar7 cung cấp khả năng quản lý quy trình làm việc liền mạch, giao diện người dùng đồ họa dễ học và dễ sử dụng để hoàn thành tất cả các dự án của bạn một cách hiệu quả. Các định dạng nhập và xuất dữ liệu toàn diện, nhiều phương pháp đo lường đảm bảo năng suất tức thì.<br /> <br /> - Hỗ trợ nhiều loại định dạng nhập và xuất khác nhau LandStar7 nhập và xuất DXF, DWG, SHP, KML, KMZ, CSV, DAT, TXT cũng như nội dung dữ liệu được tùy chỉnh đầy đủ từ dự án khảo sát lựa chọn các định dạng CSV, DAT và TXT.<br /> <br /> - Xác định vị trí và trực quan hóa dữ liệu dự án của bạn trong nháy mắt LandStar7 tích hợp bản đồ trực tuyến của Google, OSM, BING và WMS để cung cấp thông tin vị trí có ý nghĩa cho các nhà khảo sát và chuyên gia xây dựng. Các dự án được hiển thị trong địa hình khu vực hoặc hình ảnh vệ tinh trong thời gian thực.<br /> <br /> - Rất linh hoạt và sẵn sàng cho nhiều ứng dụng LandStar7 được thiết kế để cung cấp cho bạn các bộ tính năng đặc biệt, từ khảo sát đất đai, các dự án xây dựng và kỹ thuật, lập bản đồ, thu thập dữ liệu GIS, liên quan đến đường đến khảo sát đường ống.<br /> <br /> Giao diện người dùng có thể tùy chỉnh của nó giúp LandStar7 dễ sử dụng bằng cách tập trung vào các chức năng thiết yếu thường được sử dụng. Quy trình phát triển phần mềm linh hoạt Nhóm phát triển LandStar7 của chúng tôi giữ liên lạc thường xuyên với các nhà khảo sát, các chuyên gia xây dựng và mạng lưới đối tác trên toàn thế giới của chúng tôi để mang lại các chức năng vượt trội mới. Khi sử dụng LandStar7 ngay hôm nay, bạn được đảm bảo tận hưởng các tính năng mới thường xuyên mà không phải trả thêm phí.<br /> <br /> <strong>>>></strong> Trong bài viết bên dưới đây chúng tôi sẽ giới thiệu tới bạn cách cài đặt LandStar 7 trên máy tính (PC Windows & Mac). Phương pháp mà chúng tôi áp dụng là sử dụng Bluestacks, công cụ giả lập hệ điều hành Android hàng đầu hiện nay. Tất cả những gì bạn cần chỉ là một chiếc máy tính chạy Windows hoặc Mac.<br /> <br /> <strong>Bước 1:</strong> Tải xuống và cài đặt Bluestacks<br /> Tải phiên bản mới nhất tại đây <a href="https://www.bluestacks.com/vi/index.html" target="_blank">https://www.bluestacks.com/vi/index.html</a>. Trang web này hỗ trợ tiếng Việt nên bạn có thể dễ dàng tải về file cài đặt của Bluestacks. Quá trình tải về có thể mất vài phút.<br /> Sau khi tải về, nhấp chuột vào file bạn mới tải xuống để bắt đầu quá trình cài đặt. Giao diện cài đặt rất đơn giản, quá trình cặt đặt sẽ diễn ra nhanh chóng. Nếu có bất cứ vấn đề gì bạn có thể vào mục hỏi đáp của Bluestacks để tham khảo cách xử lý.<br /> <br /> <strong>Bước 2:</strong> Tải xuống file cài đặt của LandStar 7 cho máy tính PC Windows<br /> File cài đặt này có đuôi là .APK. APK là viết tắt của cụm từ tiếng Anh "Android application package" (tạm dịch là bộ cài đặt ứng dụng cho hệ điều hành Android). Bạn có thể tải về file apk này từ trang web của chúng tôi <a href="https://drive.google.com/file/d/1vSHDZvVz9EjJtpVAeKgVzJaua3D-Wwf1/view?usp=sharing">TẠI ĐÂY</a>.<br /> <br /> <strong>Bước 3:</strong> Tiến hành cài đặt LandStar 7 bằng Bluestacks<br /> Tập tin APK của LandStar 7 sau khi tải về có thể được cài đặt vào Bluestacks theo một trong các cách sau:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhấp đúp vào file APK, cách này đơn giản và nhanh nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuột phải vào file APK, chọn "Open With", sau đó chọn Bluestacks.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kéo thả file APK vào màn hình ứng dụng Bluestacks</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quá trình cài đặt LandStar 7 sẽ diễn ra nhanh chóng. Ngay sau khi quá trình cài đặt kết thúc, bạn sẽ thấy biểu tượng icon của LandStar 7 trên màn hình trang chủ của Bluestacks. Nhấp chuột vào biểu tượng icon này để bắt đầu sử dụng LandStar 7 trên máy tính PC Windows.</span></span><br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> ', 'images' => '2021080616092739e989a091af097f2762083a8ccfb10e.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23109', 'slug' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '225', 'rght' => '226', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '640', 'name' => 'iRTK4 Hi-Target - A Simple but not Simplistic GNSS System', 'code' => null, 'alias' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">iRTK4 Hi-Target là hệ thống thu GNSS thông minh đầy đủ tính năng được trang bị anten mới tích hợp đa kênh tiên tiến cho phép người dùng giải được các bài toán đo đạc một cách chính xác, đáng tin cậy. Tính năng Tilt-Surveying không cần hiệu chuẩn mà vẫn có thể thu thập dữ liệu ở nhiều nơi.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. RTK tiên tiến thế hệ mới<br /> <br /> Quản lý tín hiệu vệ tinh linh hoạt giúp bạn có được giải pháp chính xác hơn. Hiệu suất được cải thiện 20% trong môi trường GNSS đầy thử thách.<br /> <br /> 2.IMU (Biểu tượng)<br /> <br /> Bắt đầu ngay lập tức với công nghệ bù nghiêng không cần hiệu chuẩn, hỗ trợ bạn khảo sát nhanh chóng và chính xác hoặc xác định các điểm mà không cần cân bằng cột, Sai số dưới 3cm trong phạm vi nghiêng 45 °, tăng hiệu suất làm việc lên 20%.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/iRTK4(1).jpg" style="width: 383px; height: 131px;" /><br /> <br /> 3. Sạc nhanh<br /> <br /> Sạc pin của bạn lên đến 50 phần trăm chỉ trong 50 phút với bộ chuyển đổi 45W, nhờ khả năng sạc nhanh, bạn có thể sạc lại trong thời gian ngắn hơn.<br /> <br /> 4. Giao diện người dùng web (WEB UI)<br /> <br /> Cách nhanh chóng và hiệu quả để giám sát và điều khiển các thiết bị phần cứng. Ngoài ra, cung cấp quyền truy cập vào các tính năng được sử dụng phổ biến nhất thông qua trình duyệt web hiện có trên thiết bị bạn chọn — không cần tải xuống hoặc cài đặt bất kỳ thứ gì!<br /> <br /> 5. Smart Base<br /> <br /> Tối ưu hóa tuyệt vời cài đặt chế độ làm việc, Tự động ghép nối Base và Rover của bạn bằng dịch vụ toàn cầu Hi-target, mở rộng phạm vi công việc và tiết kiệm thời gian của bạn.<br /> <br /> Radio ngoài thế hệ mới<br /> <br /> HDL-460A cung cấp thông tin liên lạc dữ liệu đáng tin cậy cho các ứng dụng quan trọng trong đó yêu cầu sự kết hợp của sự ổn định, hiệu suất cao và phạm vi xa.<br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> </span></span>', 'images' => '20210805113424adf751172d9f3d7ddcf7e526d09e3fb6.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-05', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23795', 'slug' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '223', 'rght' => '224', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '639', 'name' => 'Thông số kỹ thuật của một số dòng máy toàn đạc điện tử Leica (cũ): TCR-403, TCR-405, TCR-407, TCR-705, TCR-802, TCR-805', 'code' => null, 'alias' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><font color="#323232">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ: </font><span style="line-height: 107%; letter-spacing: 0.1pt;">Leica TCR-802 Power, Leica TCR-805, Leica TC-705.</span></span></span> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> </h1> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="font-size: 17pt; line-height: 107%; font-family: Helvetica, sans-serif; letter-spacing: 0.1pt;"><o:p></o:p></span></h1> ', 'content' => '<p> <font color="#323232" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ:<br /> <br /> - </font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; line-height: 14.98px; letter-spacing: 0.1pt;">Leica TCR-802 Power<br /> - Leica TCR-805<br /> - Leica TC-705</span><br /> - <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica TCR 403, 405,407 Power</span></span><br /> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">I. Máy toàn đạc điện tử Leica TCR-802 Power</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 2”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/154253643_1379364745733010_5284105879190099443_o (1)(1).jpg" style="width: 480px; height: 360px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Máy toàn đạc điện tử Leica TCR-805</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 5”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/abaec5a286b071ee28a19.jpg" style="width: 480px; height: 640px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">III. Máy toàn đạc điện tử Leica TC-705</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Đo góc<br /> - Có độ chính xác là: ±5”<br /> - Cách đo: liên tục, đối tâm và tuyệt đối.<br /> 2. Hệ thống bù trục<br /> - 4 trục bù nghiêng<br /> - Dải bù nghiêng là : 4’<br /> - Có độ chính xác bù trục là: ±0.5”<br /> 3. Đo cạnh có gương<br /> - Khi đo bằng gương GPR1 là: 1.000m<br /> - Khi đo bằng gương GRZ4 là: 600m<br /> - Khi đo bằng gương mini GMP 101 là: 400m<br /> - Đối với gương giấy 60 x 60mm là: 250m<br /> - Có độ chính xác là: ±1mm + 1.5 ppm / 2.4 giây<br /> - Khi đo nhanh là: ±3 mm+1.5 ppm / 0.8s<br /> - Hiển thị là: 0.1 mm<br /> - Cách thức: Đổi pha với tia laze đỏ đồng trục, rõ rệt.<br /> 4. Đo cạnh không gương<br /> - PinPoint R200 là : 200m<br /> - Có độ chính xác là: ±2mm + 2 ppm / 3 giây<br /> 5. Ống kính<br /> - Có độ phóng đại ống kính là: 30 X<br /> - Độ mở ống kính là : 40mm<br /> - Dải điều quang: từ 1.7 m cho tới vô cùng<br /> 6. Dọi tâm<br /> - Kiểu dọi tâm: bằng tia laze<br /> - Có độ chính xác là: ±1mm tại 1.5 chiều cao máy<br /> 7. Màn hình, bàn phím<br /> - Được trang bị 01 Màn hình LCD rõ nét<br /> - Bàn phím gồm có chữ và số. Có chiếu sáng cho màn hình<br /> 8. Quản lý dữ liệu<br /> - Có bộ nhớ trong là: 10.000 điểm nhập cùng với điểm đo được<br /> - Truyền dữ liệu: GSI-Format via RS232<br /> - Trao đổi dữ liệu: GS116 / IDEX / GS18 / dxf<br /> 9. Pin của máy<br /> - Sử dụng Pin Lithium-Ion GEB 121,<br /> - Thời gian vận hành: từ 5 đến 8 tiếng<br /> 10. Trọng lượng<br /> - Đầu máy nặng: 5,6 kg<br /> 11. Khả năng chống nước và chống bụi<br /> - Đã đạt được tiêu chuẩn IP54<br /> - Có khả năng chịu độ ẩm lên đến 95%</span></span><br /> <br /> <h2> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IV. Máy toàn đạc điện tử Leica TCR-403; TCR-405; TCR-407</span></span></h2> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Dòng sản phẩm LEICA Total Station TPS400 Power (TCR403/405/407 Power) nổi bật với chế độ đo không gương (bằng tia laser) và laser chỉ hướng.</span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Thừa hưởng đầy đủ các tính năng của TPS400, TPS400 Power còn được tích hợp thêm khả năng đo xa bằng tia laser không cần gương, chỉ cần ngắm vào vật có độ phản xạ đủ cao (90%). Điều này đã giúp cho TPS400 Power năng động và tiện lợi hơn.</span><br /> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">1. Ống kính:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ phóng đại: 30 x<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trường nhìn : 1° 30’(1.66 gon) 26m tại khoảng cách 1km<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phạm vi điều tiêu: 1.7 m đến vô cùng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thể lưới: chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 2. Bộ nhớ, truyền dữ liệu:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ nhớ trong: 24.000 điểm ghi<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Định dạng dữ liệu: GSI / DXF / XML / ASCII/XLS/ Định dạng tự do<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 3. Bàn phím và màn hình<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Màn hình: 01 màn hình tinh thể lỏng LCD <a href="http://tracdiathanhdat.vn/gioi-thieu-cong-ty-cp-cn-va-tm-thanh-dat.htm" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;">160×280</a> pixel, đèn chiếu sang 5 cấp<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bàn phím tiêu chuẩn Alpha<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 4. Đo góc ( Hz, V)<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác (ISO 171233): 5”<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Hiển thị: 1” / 0.1 mgon / 0.01 mil<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phương pháp: tuyệt đối, liên tục, đối tâm<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ bù: tăng lên bốn lần sự bù trục<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác thiết đặt độ bù: 2”</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">5. Đo khoảng cách tới điểm phản xạ:</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Đo không gương (đo Laser RL): 170 m </span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Gương GPR1: 3500m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Tấm phản xạ (60mmx60mm): 250m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác/ Thời gian đo:<br style="margin: 0px; padding: 0px;" /> + Đo chính xác (Fine) : ±(5 mm+2 ppmD)/ 2.4 giây,<br style="margin: 0px; padding: 0px;" /> + Đo nhanh: ±(5mm+2ppmD)/0.8 giây,<br style="margin: 0px; padding: 0px;" /> + Đo đuổi: ±(5mm+2ppmD)/< 0.15 s<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 6. Hệ điều hành: Windows CE: 5.0 Core<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 7. Dọi tâm laser:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại : Điểm laser,chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác dọi tâm:1.5mm trên 1.5m chiều cao máy<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 8. Nguồn pin (GEB221):<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại: LithiumIon<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thời gian làm việc: hơn 20 h<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trọng lượng: 5.1 kg<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 9. Môi trường hoạt động:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Biên độ làm việc: từ -20°C tới +50°C<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Chịu nước và bụi (IEC 60529): IP55<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ ẩm: 95% không ngưng tụ</span></span><br /> </p> <table border="1" cellpadding="0" cellspacing="0" style="width:619px;" width="619"> <tbody> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu kỹ thuật </strong></span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>403</strong></span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>405</strong></span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>407</strong></span></span></td> </tr> <tr> <td colspan="3" style="width:499px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Độ góc (Hz, V)</strong></span></span></td> <td style="width:120px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương thức</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo liện tục tuyệt đối</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gốc hiển thị (bước nhảy)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″ / 0.1 mgon / 0.01 mil</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -3)</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3″ (1 mgon)</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5″ (1.5 mgon)</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7″ (2 mgon)</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Ống kính</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ số phóng đại</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">30x</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trưng nhìn</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1° 30′ (26 m at 1 km)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khỏang cách nhìn gần I</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưới chữ thập</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiếu sáng</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Bù nghiêng</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống bù nghiêng</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng 2 trục</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Setting accuracy</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5″</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2″</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Đo khoảng cách bằng tia hồng ngoại</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring range with circular prism GPR1</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring with reflective foil<br /> (60 mm x 60 mm)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">250m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -4)<br /> (fine/quick/tracking)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2mm + 2 ppm/5 mm + 2 ppm/5 mm + 2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">< 1 sec/< 0.5 sec/< 0.15 sec</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chính xác, nhanh, do liên tục.</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo khoảng cách không gương</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R100 (“power”) 170m (90 % reflective)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(Medium atmospheric conditions)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R300 (“ultra”) > 500 m (90 % reflective)<br /> Laser at GPR circular reflector 7’500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3mm+2 ppm/5 mm+2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">typ. 3 s/1 s</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kíck cỡ điểm với 100 m</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">12mm x 40 mm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu</strong></span></span></td> <td colspan="3" style="width:354px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ trong</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 Điểm đo</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao tiếp</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RS232</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng dữ liệu</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GSI/ASCII/dxf/Freely definable formats</span></span></td> </tr> </tbody> </table> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"> </span></span></span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="width: 250px; height: 100px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '202107301638040599a20d3fb57fe46b312b506c17e5cc.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử ', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-30', 'modified' => '2026-07-12', 'status' => '1', 'view' => '19533', 'slug' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '221', 'rght' => '222', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '638', 'name' => 'Những lỗi thường gặp ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m', 'code' => null, 'alias' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span>', 'content' => '<br /> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tham khảo một số lỗi và ý nghĩa của những lỗi này ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m</span></span><br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1565334829-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-dathop-02.jpg" style="width: 620px; height: 477px;" /><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp các lỗi trên hãy liên hệ với chúng tôi qua số hotline để được khắc phục nhé!<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/hotline(1).png" style="width: 250px; height: 100px;" /></span></span><br /> ', 'images' => '2021072917090604e0ee7f57cb99fce8677b2f946c35af.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình điện tử', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-29', 'modified' => '2026-07-12', 'status' => '1', 'view' => '14983', 'slug' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '219', 'rght' => '220', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '637', 'name' => 'So sánh giữa Garmin GPSMAP 66S vs GPSMAP 64S', 'code' => null, 'alias' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tham khảo sự khác nhau giữa hai dòng máy định vị GPSMAP 66s và 64s của hãng Garmin và những ưu điểm vượt trội mà Garmin đã mang tới cho dòng máy GPSMAP 66s nhé.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>GPSMAP 66s</strong>: Thiết bị cầm tay đa vệ tinh tích hợp cảm biến.</span></span><br /> <br /> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">GPSMAP 64s</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">: </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);">Độ nhạy máy thu cao, thiết bị có thể cùng lúc nhận được tín hiệu vệ tinh từ hai hệ thống GPS và GLONASS. GPSMAP 64s</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);"> kèm theo khí áp kế để đo cao độ, la bàn điện tử, kết nối USB tốc độ cao, hỗ trợ khe cắm thẻ nhớ, đồng thời có khả chia sẽ dữ liệu bằng Wireless với các thiết bị Garmin tương thích khác.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/So sánh GPS 66 và 64.jpg" style="width: 690px; height: 459px;" /><br /> <br /> <br /> <u><strong>>>> Cùng so sánh thông số kỹ thuật của hai dòng máy GPSMAP 66s và 64s:</strong></u></span></span><br /> <br /> <br /> <table border="1" cellpadding="0" cellspacing="0"> <tbody> <tr> <td style="width:161px;"> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 66s</strong></span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 64s</strong></span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước tổng thể:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.2 x 16.3 x 3.5cm</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.1 x 16 x 3.6cm</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3 inches</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.6 inches</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ phân giải màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">240 x 400p (pixel)</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">160 x 240p (pixel)</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ khả năng:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">16GB</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4GB</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Waypoint/Routes/ Tracklog:</span></span></td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">20000 Điểm, 250 GPX Track và 300 điểm được lưu</span></span></td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 điểm, 200 điểm được lưu</span></span></td> </tr> </tbody> </table> <br /> <ul> <li> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Theo dõi hoạt động thời tiết </span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tải xuống hình ảnh vệ tinh trực tiếp (không đăng ký)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chắc chắn theo tiêu chuẩn MIL-STD 810G cho hiệu suất nhiệt, sốc và nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhật ký Rinex</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối WiFi / Bluetooth</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Thiết kế phần cứng</strong><br /> Từ góc độ thiết kế, cả hai thiết bị đều cực kỳ giống nhau, với một vài khác biệt nhỏ về kích thước và màn hình<strong>. </strong>GPSMAP 66S có kích thước tổng thể lớn hơn một chút, nhưng sự khác biệt là gần như không thể nhận ra. Ngoài những thay đổi trực quan rõ ràng, họ cảm thấy khá giống với mẫu cũ. Những thay đổi khác là các nút nhỏ gọn hơn một chút nhưng rộng hơn. Các chức năng của nút giống nhau mặc dù phiên bản GPSMAP 66s có menu khác.<br /> <br /> Nút nguồn được đặt ở phía trên của thiết bị. Vị trí trên GPSMAP 64 có vẻ được ưu thích hơn vì bật / tắt dễ dàng nhưng bạn có thể hiểu lý do tại sao Garmin muốn thực hiện thay đổi này vì nó ít có khả năng bị hỏng khi bật thiết bị và lãng phí điện năng của bạn.<br /> <br /> Khác với những thay đổi đó và màn hình lớn hơn một chút, tất cả các cổng đều giống nhau, mặc dù Garmin đã thay đổi dây nguồn / dữ liệu thành MicroUSB. Khe cắm thẻ Micro SD có thể bên dưới pin.<br /> <br /> <strong>Tuổi thọ pin</strong><br /> Cả hai thiết bị đều hoạt động trên hai pin AA và tuổi thọ thông thường sẽ là 16 giờ mặc dù điều đó chủ yếu phụ thuộc vào chức năng ứng dụng và sử dụng GPS của bạn. GPSMAP 66 mới cũng có chức năng "<strong>Expedition"</strong> , giúp tăng đáng kể thời lượng pin của thiết bị bằng cách hạn chế các chức năng phần mềm tự động như điểm theo dõi, thời gian hiển thị và vào chế độ năng lượng thấp.<br /> <br /> <strong>Cách bật chế độ Expedition trên GPSMAP 66s</strong><br /> <br /> Chuyển đến menu chính của thiết bị> Chọn <strong>Cài đặt</strong> > Chọn "<strong>Expedition"</strong> . Sau đó, bạn sẽ được yêu cầu chọn "<em>Tự động, Nhắc hoặc Không bao giờ</em>".<br /> Chọn <em>Tự động</em> sẽ tự động đặt thiết bị sang chế độ thám hiểm sau hai phút hoạt động.<br /> Chọn <em>Nhắc </em>có nghĩa là lần sau khi bạn tắt thiết bị, nó sẽ yêu cầu bạn bật chế độ thám hiểm thay vì tắt.<br /> Chọn <em>Không bao giờ</em> sẽ tắt bất kỳ hình thức chế độ thám hiểm nào bạn đã chạy (Nhắc hoặc Tự động).<br /> <br /> <strong>Các tính năng phần mềm khả dụng trên cả hai thiết bị</strong><br /> Cả hai thiết bị đều có thể ghi lại các điểm / tuyến đường và nhật ký theo dõi, mặc dù GPSMAP 66s có thể ghi lại nhiều hơn.<br /> <br /> Một số tính năng của cả hai dòng máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính diện tích trên các thiết bị (chỉ cần đi bộ chu vi của khu vực).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tải bản đồ tùy chỉnh - bạn có thể tải bản đồ tùy chỉnh tương thích với các thiết bị của Garmin (Garmin Topo hoặc thậm chí City Nav Maps). Nếu bạn tải một trong hai bản đồ này, thì bạn sẽ có quyền truy cập vào chức năng định tuyến tự động trên thiết bị. * Bạn cần sử dụng bản đồ Topo bản FULL để định tuyến.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Geocaching thân thiện - ứng dụng Geocaching được tải sẵn trên các thiết bị, mặc dù vậy bạn cần phải đăng ký thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lịch săn / cá - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin Mặt trời và Mặt trăng - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng xem ảnh </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Kết nối GARMIN</strong><br /> <br /> Garmin Connect - khả dụng trên cả hai thiết bị cho phép thông tin hoạt động được gửi đến tài khoản kết nối Garmin của bạn và cho phép các tính năng được kết nối với điện thoại thông minh của bạn. Các tính năng được kết nối bao gồm Thông báo điện thoại, LiveTrack, GroupTrack.<br /> <br /> <strong>Chức năng cảm biến</strong><br /> Cả hai thiết bị GPS cầm tay trên đều có thể đo độ cao áp kế, la bàn bù 3 trục nghiêng. Việc đo độ cao áp kế sẽ có thể cung cấp cho bạn thông tin về những thay đổi của điều kiện thời tiết (giả sử bạn vẫn ở cùng độ cao) mặc dù nó cần phải được hiệu chỉnh đầy đủ. Cảm biến này cũng có thể được sử dụng để đo lường thay đổi độ cao của bạn và thậm chí đo lường thay đổi độ dốc AVG khi nhìn vào dữ liệu điểm của bạn.<br /> <br /> <strong>>>> Các tính năng phần mềm CHỈ khả dụng trên GPSMAP 66s:</strong><br /> <br /> - Tương thích với ứng dụng khám phá của Garmin - Sau khi được kết nối với ứng dụng điện thoại thông minh của bạn, ứng dụng khám phá của Garmin sẽ tự động đồng bộ hóa và chia sẻ điểm tham chiếu, tuyến đường và tuyến đường với thiết bị của bạn. Bạn cũng có thể tải bản đồ về điện thoại thông minh của mình để truy cập ngoại tuyến.<br /> <br /> - Theo dõi hoạt động thời tiết <br /> Garmin đã tăng thông tin thời tiết của họ một cách đáng kể với lần lặp này. Bây giờ bạn có thể nhận được rất nhiều dữ liệu thời tiết dựa trên thông tin dự báo thời gian thực. Họ có các tùy chọn bản đồ dự đoán riêng biệt về nhiệt độ, gió, mưa và mây. Nó cũng cung cấp radar thời tiết trực tiếp để bạn sẵn sàng thay đổi kế hoạch nếu bạn sắp bị bắt. Tính năng này không phụ thuộc vào kết nối Bluetooth hoạt động với điện thoại thông minh của bạn có bộ phận tiếp nhận. <br /> Hình ảnh vệ tinh hoạt động chính xác giống như trên loạt GPSMAP 64s nhưng bạn không còn phải trả tiền cho nó nữa.<br /> <br /> - Điểm mới của dòng GPSMAP 66s là khả năng tương thích với cửa hàng Connect Connect của Garmin, về cơ bản là 'App Store' của Garmin. <br /> <br /> - Chức năng InReach Remote: bạn có thể điều khiển thiết bị inReach mini của mình.<br /> <br /> - Đèn pin và SOS <br /> Một tính năng độc đáo khác là <strong>đèn pin LED</strong> rất sáng và<strong> đèn hiệu SOS</strong> có thể được sử dụng để báo hiệu sự giúp đỡ. Chức năng SOS chỉ là một nét khẩn cấp. Tuy nhiên, bạn cũng có thể đặt đèn pin nhấp nháy trong khoảng 1-9 lần mỗi giây.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp.jpg" style="width: 250px; height: 100px;" /><br /> <br /> </span></span>', 'images' => '202408021508551192007d993f13fc9de7ce32bd9bab16.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy định vị GPS cầm tay Garmin', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-28', 'modified' => '2026-07-12', 'status' => '1', 'view' => '27644', 'slug' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '217', 'rght' => '218', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '636', 'name' => 'Máy thuỷ bình kỹ thuật số Leica LS10 và LS15', 'code' => null, 'alias' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span></span>', 'content' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10, LS15 có thể làm việc liên tục nhiều giờ, độ sai lệch gần như tuyệt đối không ảnh hưởng tới độ chính xác kết quả đo.<br /> <br /> Leica LS10, LS15 thường được dùng để đo chênh cao, đo khoảng cách với yêu cầu độ chính xác cao tuyệt đối. Máy có thể dẫn cao độ phục vụ cho vẽ thành lập bản đồ.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> Tính linh hoạt </span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dòng máy thủy bình Leica LS10, LS15 được thiết kế để khảo sát, thực hiện san lấp mặt bằng thường xuyên trên các công trường xây dựng, kiểm tra hoặc giám sát các tòa nhà, đường sắt hoặc đường bộ. Với Leica LS10, LS15 bạn luôn có sẵn công cụ làm việc phù hợp.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác và độ tin cậy cao nhất</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bạn sẽ nhận được kết quả đáng tin cậy và chính xác ngay. Chất lượng quang học hàng đầu của Leica Geystems luôn mang lại hình ảnh có độ tương phản cao và giúp việc đọc chính xác và dễ dàng ngay cả trong điều kiện ánh sáng không thuận lợi. Do sự ổn định nhiệt độ cao, Leica LS10, LS15 luôn mang lại kết quả đáng tin cậy không ảnh hưởng bởi bức xạ mặt trời trực tiếp.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chăm sóc khách hàng chỉ với một cú nhấp chuột.</strong> </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông qua <a href="https://leica-geosystems.com/services-and-support/customer-support-services/active-customer-care">ACTIVE CUSTOMER CARE</a> - một mạng lưới toàn cầu gồm các chuyên gia giàu kinh nghiệm bạn sẽ được hướng dẫn một cách thành thạo mọi vấn đề:<br /> - Loại bỏ sự chậm trễ với dịch vụ kỹ thuật cao cấp<br /> - Hoàn thành công việc nhanh hơn với hỗ trợ tư vấn tuyệt vời<br /> - Tránh các lần truy cập trang web tốn kém với dịch vụ trực tuyến để gửi và nhận dữ liệu trực tiếp từ hiện trườn</span></span>g.<br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cài đặt nhanh chóng và thuận tiện</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả và giảm thời gian làm việc với Leica LS10, LS15. Sử dụng núm lấy nét để cài đặt nhanh chóng. Chuyển động tốt mang lại một hình ảnh hoàn hảo. LS10 & LS15 cung cấp cho bạn một mức độ bảo mật cao!</span></span><br /> <br /> <br /> <iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="394" src="https://www.youtube.com/embed/lBe6-DiokBQ" title="YouTube video player" width="700"></iframe>', 'images' => '20221227151040ffcdeffa3829f4a633ea0b404e2b4a0a.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình Leica', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '26500', 'slug' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '215', 'rght' => '216', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '635', 'name' => 'Ống nhòm và những lưu ý khi mua ống nhòm', 'code' => null, 'alias' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tìm hiểu về ống nhòm và tham khảo một số lưu ý khi chọn ống nhòm!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Ống nhòm là gì?</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm, còn gọi là ống ngắm hay con mắt xa, là một hệ hai kính viễn vọng quang học được gắn cạnh nhau và cùng hướng, cho phép người quan sát đặt cả hai mắt để quan sát các vật ở xa. Cấu tạo gồm vật kính, thị kính và thường có thêm hệ thống lăng kính. Vật kính bao gồm một thấu kính hội tụ, thị kính là thấu kính hội tụ có tiêu cự nhỏ nhất nhưng sẽ làm hình ảnh bị ngược nên cần thêm lăng kính đảo ảnh.<br /> <br /> * Cấu tạo ống nhòm gồm một hệ thống hai thấu kính hội tụ đặt đồng trục.</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vật kính L1: tiêu cự f1 rất dài (vài m)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thị kính L2: tiêu cự f2 ngắn (vài cm) và được sử dụng như kính lúp</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách giữa thị kính và vật kính thay đổi được.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Cấu tạo ống nhòm.png" style="width: 300px; height: 383px;" /><br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Tìm hiểu về các thông số về ống nhòm</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thường ta hay nhìn thấy ký hiệu 7×50, 8×40, 10×42, 15×70, 25×100… ở trên các ống nhòm. Hai chữ số này nói lên điều gì?<br /> <br /> <u>Ví dụ</u>: <span style="color:#000000;"><span style="text-align: justify;">Ống nhòm Nikon MONARCH 7 10x42</span></span><br /> <br /> <strong>10</strong> - số đằng trước dấu nhân (x) sẽ là độ phóng đại của ống nhòm đó (tức là 10 lần).<br /> <strong>42</strong> - số đằng sau dấu nhân sẽ là đường kính của vật kính ống nhòm theo đơn vị millimet ( tức là 42mm).<br /> <br /> Thông số độ phóng đại có nghĩa là bạn sẽ nhìn vật đó gần lại bạn 10 lần theo tỉ lệ xấp xỉ 1/10. Có nghĩa là bạn nhìn một vật xa 1km bằng ống nhòm, thì khi đó như bằng mắt thường bạn nhìn 100m.<br /> <br /> Nhiều bạn hay thắc mắc một câu hỏi khi mua ống nhòm: <strong>ống nhòm này nhìn bao xa?</strong> Thực chất cái xa vô cùng mà mình nói ở đây nó là một vật đủ lớn mà khi nhìn qua ống nhòm chúng ta có thể thấy nó và nhìn được hình dạng của nó. Điều quan trọng mà các bạn hay bỏ quên đó là ”chất lượng ảnh như thế nào?” thì rất ít bạn quan tâm. Đây là điều quan trọng để đánh giá một chiếc ống nhòm tốt hay không?</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường kính vật kính là thông số được tính bằng đơn vị mm. Nếu vật kính càng lớn thì khả năng thu sáng và chất lượng ảnh của bạn sẽ càng tốt và ngược lại. Tuy nhiên nếu mà lớn quá thì một trong những nhược điểm đó là ảnh quan sát thu được sẽ bị sai sắc (là điều không thể tránh khỏi). Bởi vậy khi lựa chọn mua ống nhòm thì các bạn nên chọn sao cho phù hợp với độ phóng đại ống nhòm mà mình mong muốn. Ví dụ 7×50, 8×40, 10×42, 10×50, 12×60, 15×70…</span></span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Xuất xứ tất cả các loại ống nhòm hiện nay</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm hiện nay có ba nguồn gốc xuất xứ chính, đó là tự lực sản xuất sản phẩm, OEM và ODM. Vậy những khái niệm này là gì?</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Những sản phẩm đến từ các thương hiệu tự lực sản xuất có nghĩa là ống nhòm của thương hiệu này được thiết kế và gia công bởi chính một đơn vị. Tuy nhiên hiện nay có khá ít thương hiệu có thể tự lực sản xuất được mà không nhờ bên thứ ba. Đối với những sản phẩm được tự lực sản xuất này thì sẽ mang đậm dấu ấn của thương hiệu và không bị ảnh hưởng bởi các yếu tố kỹ thuật từ các bên. Tuy nhiên những chiếc ống nhòm được tự lực sản xuất có giá thành khá cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm <strong>OEM</strong> là những chiếc ống nhòm được công ty chủ chủ quản thiết kế nhưng lại không trực tiếp gia công, mà phải nhờ đến một bên thứ 3. Đơn vị gia công sẽ hoàn thiện sản phẩm dựa trên bản thiết kế và chịu sự kiểm soát chất lượng từ đơn vị chủ quản thiết kế. Với hình thức này thì sản phẩm thường có giá thành rẻ hơn nhưng về dấu ấn thương hiệu của sản phẩm thì không nổi bật nhiều.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Và hình thức cuối cùng là sản phẩm <strong>ODM</strong>, những sản phẩm ống nhòm thường đến từ các thương hiệu có khả năng kinh doanh nhưng không có khả năng thiết kế hay gia công sản phẩm. Ống nhòm của những thương hiệu này sẽ được đặt thiết kế và gia công ở một đơn vị nào đó và in thương hiệu của mình lên.</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc xác định được nguồn gốc của sản phẩm cũng là cách chọn mua ống nhòm mà bạn nên lưu tâm. Mỗi thương hiệu đều có một ưu nhược điểm riêng, tùy vào nhu cầu bạn có thể lựa phương thức sản xuất phù hợp.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Phân loại các loại ống nhòm hiện nay theo chức năng</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường có rất nhiều loại ống nhòm khác nhau, dưới đây là một số loại ống nhòm phố biến được nhiều người lựa chọn nhất.<br /> - <strong>Ống nhòm mini</strong> là loại ống nhòm có kích thước gọn nhẹ đến bất ngờ, tuy nhiên tầm nhìn thì hơi hạn chế. Loại ống nhòm này có kích thước rất nhỏ nên có thể bỏ trong balo, túi xách để mang theo bên người, trong các chuyên tham quan, thám hiểm, du lịch.<br /> - <strong>Ống nhòm ban đêm</strong> là loại ống nhòm có khả năng nhìn xuyên bóng tối nhờ được trang bị đèn hồng ngoại. Hình ảnh nhìn được trong bóng tối qua ống nhòm hồng ngoại thường không màu. Ngoài ra, loại ống nhòm hồng ngoài ngày còn được tích hợp tích năng ghi hình, chụp ảnh.<br /> - <strong>Ống nhòm chụp ảnh</strong> là loại ống nhòm được tích hợp thêm chức năng bắt lại những khoảnh khắc đẹp khi chúng ta quan sát. Tuy nhiên, vì không phải là thiết bị chuyên về chụp ảnh nên hình ảnh chụp được có chất lượng còn hạn chế.<br /> - <strong>Ống nhòm đo khoảng cách</strong> là loại ống nhòm ngoài việc quan sát một đối tượng thì còn đo được khoảng cách từ chỗ chúng ta đứng đến vật thể. Ngoài ra, loại ống nhòm này còn được tích hợp tính năng đo góc, đo chiều cao<br /> - <strong>Ống nhòm nhiệt</strong> loại ống nhòm hiện đại có khả năng hiển thị thân nhiệt của đối tượng bạn đang quan sát, cũng như phân biệt được đối tượng với môi trường xung quanh nhờ sự chênh lệch nhiệt độ.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Một số lưu ý khi chọn ống nhòm phù hợp với nhu cầu</strong></span></span></h2> <p> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.1 Kích thước ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ống nhòm có kích thước lớn Full-Size (8x42, 10x50)<br /> Các dòng ống nhòm có kích thước lớn thường thu nhận ánh sáng tốt hơn, có thể xem và quan sát trong điều kiện ánh sáng yếu như lúc bình minh hay hoàng hôn. Các ống nhòm này sẽ cung cấp cho bạn cái nhìn rộng lớn về quang cảnh phía trước, thích hợp cho ngắm chim, động vật hoang dã,... nhưng ngược lại kích thước của chúng lại lớn và thường rất nặng.<br /> <br /> - Ống nhòm có kích thước trung bình Mid-Size (7x40, 16x32, 10x42)<br /> Các dòng ống nhòm có kích thước trung bình thường được sử dụng cho ngắm cảnh thiên nhiên, cho các hoạt động du lịch dã ngoại hoặc sử dụng để quan sát các buổi biểu diễn, xem các trận bóng đá,... Ống nhòm này có kích thước vừa phải, khả năng quan sát tốt, trọng lượng phù hợp với mọi người. Tuy nhiên mức độ truyền dẫn ánh sáng lại không được bằng ống nhòm có kích thước lớn.<br /> <br /> - Ống nhòm có kích thước nhỏ gọn - ống nhòm mini (6x18, 8x21)<br /> Các loại ống nhòm này thường thích hợp để sử dụng cho các hoạt động ban ngày. Đây là loại ống nhòm có kích thước nhỏ gọn, cầm vừa tay, thoải mái khi sử dụng trong thời gian dài.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/genmedia_PIC1739447_RL_02_w1500_h1500_c217224230255(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.2 Độ phóng đại của ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi ống nhòm thường được xác định bởi hai cặp số. Số đầu tiên chỉ độ phóng đại của ống nhòm và số thứ 2 thể hiện đường kính vật kính của ống nhòm. Ở đây ta thấy đối với ống nhòm có độ phóng đại lớn hình ảnh quan sát được sẽ càng gần hơn. Tuy nhiên, nếu bạn chọn ống nhòm có độ phóng đại quá lớn, ống nhòm siêu zoom thì kích thước lớn sẽ làm tăng độ rung khi tay bạn cầm không chắc dẫn đến hiện tượng mỏi mắt.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.3 Đường kính ống kính mục tiêu rộng</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giống như độ phóng đại, thông số thứ 2 của ống nhòm là về đường kính ống kính vật kính. Đường kính ống kính càng rộng cho phép tiếp nhận càng nhiều ánh sáng hơn. Khi nhiều ánh sáng bạn sẽ quan sát thấy hình ảnh tươi sáng hơn đặc biệt là trong điều kiện ánh sáng yếu như hoàng hôn hay lúc bình minh.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ong-nhom-hong-ngoai-2-mat-co-ghi-hinh-4x50mm-equinox-z_2253.png" style="width: 420px; height: 329px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.4 Thoát sinh học - Exit Pupil</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ thoát sinh học cho biết ảnh, độ sáng của vật thể khi đang quan sát. Nếu thông số này lớn sẽ làm cho hình ảnh quan sát được rõ nét hơn, tươi sáng hơn. Cách tính toán thông số này bằng cách lấy đường kính phóng đại chia cho độ phóng đại của ống kính. Nếu thông số này nằm ở ngưỡng 7 thì đó là ống kính tốt có thể lựa chọn để quan sát các vật trong ánh trời sáng trăng, lúc ánh sáng yếu, ở ngưỡng 5mm hoặc cao hơn sẽ thích hợp cho quan sát ban ngày hoặc ánh sáng yếu.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.5 Khoảng cách đặt mắt - Relief Eye</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Relief Eye là khoảng cách đặt mắt giữa thị kính tới mắt của bạn sao cho khả năng quan sát tốt nhất thoải mái nhất. Khoảng đặt mắt càng lớn bạn lại càng phải đưa ống nhòm ra xa hơn so với mắt mình, nhưng lại tốt đối với những người đeo kính (đối với những người đeo kính nên chọn thông số này là 11mm hoặc cao hơn).<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.6 Trường nhìn</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trường nhìn là thông số cho phép bạn biết độ rộng khu vực mình muốn quan sát tại khoảng cách 1000m từ nơi bạn đang đứng. Trường nhìn rộng để quan sát thiên nhiên, quan sát động vật, trường nhìn hẹp giúp quan sát các đối tượng ít di chuyển.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/nikon-coolshot-40-i-4(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.7 Hệ thống lấy nét</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm thường được trang bị hệ thống lấy nét ở trung tâm cho cả hai mắt, hoặc điều chỉnh diop trên cả hai mắt. Việc điều chỉnh diop trên hai mắt giúp bù đắp những hạn chế về thị lực giữa hai mắt của bạn.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.8 Lớp phủ thấu kính</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm giá rẻ thường không được tráng phủ nhiều lớp ra vậy cảm giác nhìn qua ống nhòm này thường mờ và không rõ nét. Lớp phủ thấu kính giúp giảm sự phản xạ ánh sáng và tăng khả năng truyền dẫn ánh sáng.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.9 Khả năng chống nước và kháng thời tiết</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng chống nước trên ống nhòm có thể là khả năng chịu nước, khả năng chống thấm, khi sử dụng ở điều kiện thời tiết thay đổi, nhiệt độ thay đổi.<br /> Các loại ống nhòm du lịch thường được trang bị khả năng chống nước mưa, ống nhòm quân sự, ống nhòm hải quân có thể được trang bị thêm khả năng chịu được áp lực nước hoặc nổi trên mặt nước.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.10 Khả năng chống đọng sương</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm giá rẻ thường bị mờ sương khi di chuyển qua lại giữa các vùng có nhiệt độ khác nhau. Mờ sương gây nhiều phiền toái cho bạn, thậm chí có thể làm hỏng ống nhòm nếu không loại bỏ độ ẩm đó ra khỏi ống nhòm.<br /> Hiện nay, các ống nhòm chuyên dụng, ống nhòm cao cấp đã được bơm các loại khí trơ, khí nitor bên trong ống nhòm để tránh gây hiện tượng ngưng tụ hơi nước. Điều này giúp bảo vệ ống nhòm của bạn tránh đọng sương lên bền mặt ống kính.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Địa chỉ mua ống nhòm/ ống nhòm đo khoảng cách uy tín</span></span></h2> <p id="2-dia-chi-mua-thiet-bi-may-bay-khong-nguoi-lai-uav-uy-tin" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại ống nhòm/ ống nhòm đo khoảng cách của các hãng Leica, Nikon, Barska, Garmin, Terrinox, Steiner, SNDWAY, ... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="color: rgb(51, 51, 51); text-align: justify;"> </span><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"> </span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span><br /> ', 'images' => '20210714155415df03af942339bf722676fd2f752f2a1f.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'ống nhòm đo khoảng cách', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-14', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24581', 'slug' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '213', 'rght' => '214', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '634', 'name' => 'Phụ kiện trắc địa', 'code' => null, 'alias' => 'phu-kien-trac-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Phụ kiện trắc địa là gì?</span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hầu hết những phụ kiện trắc địa đều thiết kế có thể tách rời với máy, phòng trong những trường hợp bị hư hỏng, chỉ phải thay thế phụ kiện mới. Điều này khiến cho việc lắp ráp phụ kiện cũng như sử dụng các máy trắc địa được linh hoạt với mọi trường hợp.<br /> Phụ kiện đo đạc, trắc địa bao gồm nhiều loại khác nhau ứng dụng cho các thiết bị đo đạc ( máy thủy bình, máy kinh vĩ điện tử, máy toàn đạc điện tử, máy định vị GPS) như: thước thép, bật mực, đế dọi tâm, thước đẩy bánh xe, mốc sứ, thùng máy, gương sào, đế dọi tâm, chân mia, dây cáp, pin sạc,…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/PHỤ KIỆN TRẮC ĐỊA(2).png" style="width: 680px; height: 544px;" /></span></span></p> <p style="text-align: center;"> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lưu ý khi lựa chọn phụ kiện trắc địa</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải đảm bảo phù hợp với cấu tạo của máy, chức năng của máy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải cùng hãng sản xuất hoặc phải là sản phẩm chính hãng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải phù hợp với công suất của máy, tránh trường hợp chọn phụ kiện có công suất thấp hoặc lớn hơn công suất thực của máy gây hư hỏng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải có cấu tạo tính năng tương đồng với từng đời máy</span></span></li> </ul> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Phụ kiện máy(2).jpg" style="width: 620px; height: 803px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Địa chỉ mua phụ kiện trắc địa uy tín</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại phụ kiện trắc địa: chân máy toàn đạc, chân máy thủy bình, mia 5m, mia Invar, sào gương, pin máy toàn đạc, sạc pin máy toàn đạc, đế máy, cáp trút số liệu,... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> </span><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 145 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"> </span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span></span></span>', 'images' => '20211207150823dc9ff8b8d2712352c76fd4e56030baca.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Phụ kiện trắc địa', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-12', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24887', 'slug' => 'phu-kien-trac-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '211', 'rght' => '212', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '632', 'name' => 'Một số lưu ý khi chọn mua máy bộ đàm', 'code' => null, 'alias' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng chúng tôi tham khảo một số lưu ý để lựa chọn cho mình một chiếc bộ đàm phù hợp nhé!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Lựa chọn băng tần sử dụng</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm cầm tay và máy bộ đàm cố định có 2 loại băng tần là VHF (136 – 174MHz) và UHF (400 – 527MHz).<br /> <br /> Nếu mua thêm để dùng chung với máy có sẵn, phải xác định máy bộ đàm đang dùng là loại băng tần nào (VHF hay UHF) và model là gì. Trong trường hợp đây là lần đầu tiên mua bộ đàm và chỉ có nhu cầu dùng chúng với nhau thì người dùng có thể chọn loại băng tần nào cũng được. Tùy thuộc vào địa hình, khu vực sử dụng và để đảm bảo liên lạc xa nhất, tốt nhất bạn nên chú ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ở vị trí khu vực trống trải, ít vật cản nên chọn băng tần VHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại khu vực nhà cao tầng, nhiều công trình dân dụng, trong thành phố nên chọn tần số UHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cũng cần lưu ý đến khả năng được cấp phép sử dụng tần số tại vùng sử dụng bộ đàm.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Lưu ý:</strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách liên lạc tối đa giữa hai máy cầm tay tại khu vực trống trải là khoảng 3km, trong thành phố không quá 2km. Những vị trí càng đông dân cư, càng nhiều công trình kiến trúc. Mật độ dân cư đông thì cự ly sẽ rút ngắn lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ đàm cầm tay có thể liên lạc với trung tâm của mình ở cự ly xa hơn so với cự ly giữa 2 máy cầm tay. Điều kiện là máy tại trung tâm phải có công suất lớn. Và anten đặt trên cột cao (càng cao thì liên lạc càng xa).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu muốn tăng cự li liên lạc giữa các máy với nhau, có thể chọn dùng Repeater (Bộ lặp) với anten lắp trên cao.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><img alt="" src="/admin/webroot/upload/image/images/1534383704-bodam_02.jpg" style="width: 480px; height: 360px;" /></strong></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Lựa chọn dòng máy phù hợp</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tùy thuộc vào khả năng tài chính cũng như nhu cầu mà lựa chọn dòng máy phù hợp. Trên thị trường hiện nay có khá nhiều thương hiệu máy bộ đàm. Nổi bật hơn cả là các dòng máy đến từ thương hiệu Motorola, Icom và Kenwood. Các dòng sản phẩm khác được đánh giá là có độ bền kém hơn, chất lượng thu phát cũng không tốt bằng.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu dùng cho công trường xây dựng hay dịch vụ bảo vệ thì nên chọn loại có cấu hình trung bình. Motorola CP1100, CP1300, GP3188 loại không bàn phím với khả năng kháng nước, chống bụi, chống va đập tốt là một gợi ý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các công ty vận tải, vận chuyển hàng hóa/hành khách…thì có thể chọn máy bộ đàm gắn xe cố định như Motorola GM3188, GM338. Nếu công ty yêu cầu đảm bảo quản lý liên lạc tại nhiều khu vực địa lý có khoảng cách xa thì phải chọn dòng máy kĩ thuật số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Với bộ đàm dùng cho nhà hàng, khách sạn, khu công nghiệp thì nên chọn dòng máy bộ đàm cầm tay giá rẻ như Motorola MagOne A8, GP2000s, Kenwood TK-2107 hay Icom IC-F3003 đều được.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các đơn vị chuyên nghiệp mà yêu cầu sản phẩm cần phải đảm bảo an ninh để liên lạc thông suốt kể cả trong điều kiện thời tiết khắc nghiệt, môi trường phức tạp như Công an, Bộ đội, phục vụ công tác Phòng chống thiên tai, bão lũ, các công ty dầu khí…bộ đàm được lựa chọn phải là dòng chuyên nghiệp, chuyên dụng và hiệu suất cao\</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm phổ thông có giá thành tương đối rẻ, cấu hình vừa đủ đáp ứng những yêu cầu đơn giản. Vừa hài hòa về chi phí, vừa mang lại hiệu quả công việc. Trong khi đó, các dòng sản phẩm chuyên nghiệp thường có mức giá cao hơn với nhiều tính năng hơn.<br /> <br /> Có thể nói, dòng sản phẩm máy bộ đàm đến từ thương hiệu Motorola hiện đang đứng đầu về công nghệ (cả analog và digital). Nhờ vào ưu điểm là độ bền cao, khả năng chống chịu tốt cũng như cách vận hành đơn giản. Các dòng sản phẩm chuyên dụng có thể kể đến như Motorola GP3188, GP328, XiR P8200/8208, P8260/8268…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/business-radios-2021.png" style="width: 480px; height: 238px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2 style="box-sizing: border-box; margin-top: 0px; margin-bottom: 0.5rem; font-weight: 500; line-height: 1.2; font-size: 20px; color: rgb(68, 68, 68); font-family: Roboto, sans-serif;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; font-weight: 600;">3. Lựa chọn máy bộ đàm với những tính năng phù hợp</span></span></span></h2> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát RF: Máy cầm tay thường có công suất tối đa khoảng 5W, con số này càng cao thì cự ly liên lạc càng lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất âm thanh: Nếu sử dụng trong môi trường ồn ào, nhiều tiếng động. Thì nên chọn máy công suất lớn có bộ lọc âm thanh tốt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các tính năng bảo vệ: Máy được thiết kế với kết cấu vững chắc, theo tiêu chuẩn quân đội Mỹ (MIL-STD810), chống nước, chống nổ…</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mạch mã hóa và giải mã PL/DPL, CTCSS/DTCS: Tránh được những cuộc liên lạc không cần thiết khi nhiều người dùng chung 1 kênh tần số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng kích phát bằng giọng nói (VOX) để hoạt động khi rảnh tay</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng nhập tần số từ bàn phím của máy: Thường được trang bị ở các dòng máy phổ thông. Tuy vậy, tính năng này lại khiến người dùng vô tình làm sai tần số kênh đã đặt ra khiến máy bộ đàm không liên lạc được với máy khác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng bảo mật thông tin: Nhiều cấp bảo mật khác nhau như Voice Scramler, AES/DES…</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/MotorolaG3588.jpg" style="width: 480px; height: 480px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Chọn phụ kiện bộ đàm</strong></span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin bộ đàm</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên chọn pin dung lượng lớn, thời gian sử dụng lâu cho mỗi lần sạc. Pin cho máy bộ đàm nên từ 1000mAh – 2200mAh với thời gian hoạt động tối đa đến 19 giờ.<br /> Pin Li-Ion có dung lượng lớn và tuổi thọ pin cao có thể sạc bất cứ lúc nào mà không cần dùng hết trước khi sạc như các loại pin khác. Pin Ni-MH có dung lượng và tuổi thọ pin thấp hơn Li-Ion. Muốn pin sử dụng bền lâu thì không thể sạc nhồi mà phải dùng hết trước khi sạc lại. Trong trường hợp dùng lâu, để tránh bị hết pin bất ngờ, hãy mua thêm pin dự phòng để đảm bảo liên lạc được thông suốt.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ sạc</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu không có thời gian sạc pin lâu, hãy sử dụng bộ sạc nhanh, nhanh hơn bộ sạc chuẩn từ 3-5 giờ.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Loa – Micro và các loại tai nghe choàng đầu, áp cổ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo liên lạc kể cả khi đeo máy thường xuyên ở thắt lưng, trên cầu vai/gắn trên cổ áo. Phù hợp với những ai thường xuyên dùng tay cho những công việc khác như bảo an, nhân viên phục vụ…<br /> Tai nghe choàng đầu và bộ áp cổ khi dùng với máy có chức năng kích phát bằng giọng nói (VOX) sẽ giúp rảnh tay hoàn toàn khi liên lạc bằng bộ đàm. Bộ áp cổ sẽ giúp âm thanh gửi đi trong hơn, không có tiếng ồn kể cả khi đang nói trong khu vực nhiều tiếng ồn.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm của mỗi hãng khác nhau đều kèm theo anten tiêu chuẩn, cho cự li liên lạc tốt nhất. Loại cải tiến kích có thước ngắn hơn giúp máy gọn và đỡ vướng víu. Anten không phù hợp có thể làm hư hỏng máy. Do vậy, nếu cần một anten mới, hãy chọn đúng mã số của loại kèm theo máy.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/bo-dam-motorola-gp-3588-plus(1).jpg" style="width: 480px; height: 270px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ mua máy bộ đàm uy tín</span></span></h2> <p> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên phân phối các loại máy bộ đàm của các hãng Motorola, Kenwood, Icom, Hypersia,... lâu năm uy tín trên toàn quốc.</span></p> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> <span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span></span></span><br style="margin: 0px; padding: 0px;" /> </p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">@ Luôn đồng hành cùng bạn!</strong><span style="margin: 0px; padding: 0px;"> </span></span></span></p> ', 'images' => '20210709160653d0336e3b94fd76fc2ef669058d11917a.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'máy bộ đàm', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-09', 'modified' => '2026-07-12', 'status' => '1', 'view' => '15419', 'slug' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '209', 'rght' => '210', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $detailNews = array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $setting = array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ) $tin_ft = array( (int) 0 => array( 'Post' => array( 'id' => '588', 'name' => 'Hướng dẫn mua hàng', 'code' => null, 'alias' => 'huong-dan-mua-hang', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p> <span style="color:#000000;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> </span></span><span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="line-height: 107%;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></span></span> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="color:#000000;">Quý khách có thể mua hàng theo những cách sau:</span></span></span><br /> </p> <p> <span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Cách 1: </strong>Đặt hàng trực tiếp tại mục ĐẶT HÀNG (Thêm vào giỏ hàng) trên website: </span></span><span style="font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><a href="https://maytracdiasaoviet.vn/" target="_blank"><span style="color:#000000;">https://tracdiathanhdat.vn/</span></a></span></span><span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;">.</span></span></p> <p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngay sau khi tiếp nhận thông tin đặt hàng, nhân viên kinh doanh công ty sẽ gọi điện cho quý khách để xác nhận đơn hàng và tiến hành giao hàng cho quý khách ngay trong ngày.</span></span></span></p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Cách 2: </strong>Đặt hàng trực tiếp qua số hotline của công ty <br /> <br /> – Tại trụ sở Hà Nội: <strong>0913 051 734 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">– Tại VPGD Hồ Chí Minh:<strong> 0904 925 936 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Cách 3: </strong>Quý khách mua hàng trực tiếp tại địa chỉ sau:<br /> <br /> <strong>CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></span></span></span><br /> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 145 Láng Hạ, Phường Láng Hạ, Hà Nội</span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> </div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rất mong được hợp tác với Quý khách hàng trên cả nước.<br /> <br /> Trân trọng!</span></span></span></div> ', 'images' => '202104071220058398ebc1b9cf669cf602eb8040be387a.jpg', 'images_multi' => '', 'pos' => '1', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Máy trắc địa chính hãng | RTK GNSS, máy toàn đạc, máy thủy bình – Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy RTK GNSS, máy toàn đạc, máy thủy bình, GPS cầm tay chính hãng. Tư vấn kỹ thuật – giao hàng toàn quốc. Trắc địa Thành Đạt – 0913 051 734', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '4244', 'slug' => 'huong-dan-mua-hang', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '143', 'rght' => '144', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '586', 'name' => 'Chính sách thanh toán', 'code' => null, 'alias' => 'chinh-sach-thanh-toan', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> <!--[if !supportLineBreakNewLine]--><!--[endif]--></span> </span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chúng tôi c</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">hấp nhận các hình thức thanh toán bằng tiền mặt, chuyển khoản theo đúng quy định pháp luật. </span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (22).png" style="width: 320px; height: 183px;" /></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Quý khách có thể chọn các phương thức thanh toán sau đây:</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">I. Thanh toán trực tiếp tại cửa hàng<br /> <br /> II. Thanh toán qua hình thức chuyển khoản</span></strong><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Thông tin tài khoản:</span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <strong style="color: rgb(0, 0, 0); margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"><em>Chủ tài khoản</em>: CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></p> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em style="margin: 0px; padding: 0px;"><strong>Số tài khoản</strong></em><em style="margin: 0px; padding: 0px;">: <strong>0611001648635</strong> tại Ngân hàng TMCP Ngoại thương Việt Nam, chi nhánh Ba Đình<br /> <br /> <strong>Nội dung chuyển khoản</strong>: Tên công ty - Thông tin sản phẩm đã mua – Số điện thoại người chuyển tiền</em></span></span></span><br /> <br /> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Sau khi chuyển khoản hãy thông báo lại cho chúng tôi để chúng tôi kiểm tra và xác nhận lại cho Quý khách.</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">III. Thanh toán khi nhân viên đến giao nhận hàng</span></strong></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66);"> <span style="color:#000000;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">Quý khách hàng thanh toán trực tiếp bằng tiền mặt cho nhân viên giao hàng của chúng tôi ngay khi kiểm tra và nhận hàng.<br /> <br /> Mọi phản hồi và thắc mắc về việc thanh toán, Quý khách liên hệ <strong>0942 288 388</strong> để được tư vấn.</span></font><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span></span></p> ', 'images' => '20210407122232bf3e6d52a68ca60f97fc6048b14e4acc.jpg', 'images_multi' => '', 'pos' => '2', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3881', 'slug' => 'chinh-sach-thanh-toan', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '139', 'rght' => '140', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '587', 'name' => 'Chính sách vận chuyển', 'code' => null, 'alias' => 'chinh-sach-van-chuyen', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><span style="font-family:verdana,geneva,sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></strong><br /> <br /> Chúng tôi hỗ trợ giao hàng toàn quốc cho Quý khách mua hàng tại hệ thống cửa hàng của chúng tôi.</span></span><br /> </div> <div> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">Sau khi nhận được thông tin đặt hàng chúng tôi sẽ lập tức xử lý đơn hàng và phản hồi lại thông tin cho khách hàng về việc thanh toán và giao nhận.<br /> <br /> <strong>> Thời gian giao hàng </strong><br /> <br /> - Trong vòng 24 giờ nếu địa điểm giao hàng <b style="color: rgb(74, 74, 74); box-sizing: border-box;">≤ 20 km</b> tính từ cửa hàng của chúng tôi.</span></span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Trong vòng 1-2 ngày nếu địa điểm giao hàng nằm trong phạm vi <b style="box-sizing: border-box">50 - 100 km</b> </span></span><span style="font-family: Arial, sans-serif;"><o:p></o:p></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">tính từ cửa hàng của chúng tôi.<br /> <br /> - Trong vòng 3-5 ngày</span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> nếu địa điểm giao hàng từ <strong>20</strong></span><b style="font-family: tahoma, geneva, sans-serif; font-size: 14px; box-sizing: border-box;">0 km</b><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> trở lên </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">tính từ cửa hàng của chúng tôi.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trước khi vận chuyển, bộ phận giao nhận sẽ liên lạc với Quý khách hàng để xác nhận khoảng thời gian và địa điểm giao hàng cụ thể.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">> Phí vận chuyển</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> sẽ được tính theo từng giá trị đơn hàng và được thoả thuận giữa hai bên ngay trước khi giao hàng. </span></p> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px;">Mọi thắc mắc liên quan đến việc giao hàng, Quý khách hàng liên hệ số điện thoại <strong>0942 288 388</strong> để được giải đáp và giải quyết kịp thời.<br /> <br /> Trân trọng!</span></span></span></p> </div> ', 'images' => '20210407122135505ddef64809ce7ee5f9db7cfdfd3e2e.jpg', 'images_multi' => '', 'pos' => '3', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3923', 'slug' => 'chinh-sach-van-chuyen', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '141', 'rght' => '142', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '585', 'name' => 'Chính sách đổi trả', 'code' => null, 'alias' => 'chinh-sach-doi-tra', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Chúng tôi hỗ trợ đổi trả sản phẩm trong vòng 07 ngày nếu lỗi phát sinh do nhà sản xuất.<br /> <br /> Trong thời gian đổi trả, Công ty CP Công nghệ và Thương mại Thành Đạt sẽ hỗ trợ cung cấp máy móc thay thế kịp thời để công việc khảo sát, đo đạc của Quý khách không bị gián đoạn. Chi phí vận chuyển cho việc đổi trả do hai bên tự thoả thuận.</span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">> Điều kiện đổi trả: </span></span></strong></span><br /> <ul> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm phải còn nguyên tem mác.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm bị lỗi do nhà sản xuất.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm không đúng như đơn đặt hàng.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lần đổi trả cho 1 sản phẩm là 1 lần</span></span></span></li> </ul> <br /> <div style="text-align: start;"> <span style="color:#000000;"><strong><span style="text-align: justify;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">> </span></font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Việc đổi trả sẽ không được chấp nhận nếu:</span> <span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"> </span></span></strong></span></div> <ul> <li> <span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Trong quá trình sử dụng sản phẩm Quý khách không tuân thủ các chỉ dẫn của Nhà sản xuất.</span></span></li> <li> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="text-align: justify;">S</span>ản phẩm bị trầy xước, không nguyên vẹn</span></span></span></li> </ul> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, chúng tôi cũng hỗ trợ đổi trả sản phẩm vì lý do chủ quan của Quý khách hàng ( muốn đổi sang sản phẩm cùng chủng loại nhưng khác về màu sắc, hãng sản xuất hay thông số kỹ thuật). Chi phí cho việc đổi trả này do Quý khách hàng chịu.</span></span><br /> <br /> <span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"><img alt="" src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/lien-he.jpg" style="margin: 0px; padding: 8px 0px; height: 36px; max-width: 100%; vertical-align: middle; border: 0px; opacity: 1; font-size: 13px; width: 38px;" /><span style="margin: 0px; padding: 0px; font-size: 13px;"> </span></strong></span></span><span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"> </strong></span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Liên hệ hotline <strong>0913 051 734</strong> để được tư vấn đổi trả theo đúng qui định.</span></span>', 'images' => '202104071223177d9b7f6e319f9fa90078c7c61ed9bd19.jpg', 'images_multi' => '', 'pos' => '4', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3915', 'slug' => 'chinh-sach-doi-tra', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '137', 'rght' => '138', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '583', 'name' => 'Chính sách bảo hành', 'code' => null, 'alias' => 'chinh-sach-bao-hanh', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="color: rgb(66, 66, 66); text-align: justify;">Tất cả các sản phẩm mua tại hệ thống cửa hàng của chúng tôi đều được bảo hành chính hãng theo quy định của nhà sản xuất. </span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(66, 66, 66); text-align: justify;">Chúng tôi hỗ trợ kỹ thuật 24/7 qua số hotline <strong>0913 051 734</strong> trong suốt quá trình Quý khách sử dụng sản phẩm.</span></span></span></div> <div> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">1. Sản phẩm được bảo hành miễn phí: </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm sẽ được bảo hành miễn phí nếu sản phẩm đó còn thời hạn bảo hành (được tính kể từ ngày mua hàng).</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Thời hạn bảo hành được ghi trên Tem Bảo Hành và theo quy định của từng Nhà sản xuất đối với tất cả các sự cố về mặt kỹ thuật.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Có Tem bảo hành trên sản phẩm.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi sản phẩm có sự cố kĩ thuật chúng tôi sẽ trực tiếp khắc phục sự cố tại cửa hàng hoặc thay mặt khách hàng mang sản phẩm tới Trung Tâm Bảo Hành của hãng.</span></span></li> </ul> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">2. Những trường hợp không được bảo hành (sửa chữa có tính phí): </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm đã quá thời hạn bảo hành hoặc không có Tem bảo hành trên máy.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hư hỏng do tác động cơ học làm rơi, vỡ, va đập, trầy xước, móp méo, ẩm ướt, hoen rỉ, chảy nước hoặc do hỏa hoạn, thiên tai gây nên.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hỏng do sử dụng không đúng cách, sử dụng sai điện áp quy định.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Tự ý tháo dỡ, sửa chữa sản phẩm</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span><br /> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"> </span></span></div> ', 'images' => '20210407123801c4049edabae0c54e2347c82e21413ec3.jpg', 'images_multi' => '', 'pos' => '5', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3646', 'slug' => 'chinh-sach-bao-hanh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '133', 'rght' => '134', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '584', 'name' => 'Chính sách bảo mật thông tin', 'code' => null, 'alias' => 'chinh-sach-bao-mat-thong-tin', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">1. Mục đích thu nhập thông tin cá nhân</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51);">Thông tin cá nhân mà chúng tôi thu thập bao gồm: họ tên, địa chỉ giao hàng, địa chỉ email, số điện thoại cố định, số điện thoại di động, cookies.</span></p> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Đối với các giao dịch thanh toán qua cổng thanh toán trực tuyến, Chúng tôi không lưu trữ thông tin số tài khoản, số thẻ ngân hàng của khách hàng, những thông tin này sẽ được cổng thanh toán lưu trữ để phục vụ việc đối soát giao dịch.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân khách hàng sẽ được sử dụng cho một hoặc tất cả các mục đích sau đây:</span></span></span></span> <ul style="margin: 0px; padding: 0px 0px 0px 15px;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Giao hàng cho quý khách đã mua hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông báo về việc giao hàng và hỗ trợ khách hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Cung cấp thông tin liên quan đến sản phẩm</span></span></span></span></li> </ul> </li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoài ra, chúng tôi sẽ sử dụng thông tin của quý khách cung cấp để hỗ trợ quản lý tài khoản khách hàng (nếu có); xác nhận và thực hiện các giao dịch tài chính liên quan đến các khoản thanh toán trực tuyến của quý khách;</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi không được phép thu nhập thông tin nếu khách hàng không tự nguyện, cũng không sử dụng phương thức thu thập thông tin khách hàng bằng các hình thức bất hợp pháp.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">2. Phạm vi sử dụng thông tin</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân thu thập được sẽ chỉ được sử dụng trong nội bộ công ty.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể chia sẻ tên và địa chỉ của quý khách cho dịch vụ chuyển phát nhanh có uy tín để giao hàng cho quý khách theo cam kết.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">3. Thời gian lưu trữ thông tin</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">Thông tin khách hàng được lưu trữ nội bộ cho đến khi có yêu cầu xóa thông tin từ phía khách hàng.</span></p> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Những người hoặc tổ chức có thể được tiếp cận với thông tin </span></span></h2> <br /> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng được tiếp cận với thông tin cá nhân của khách hàng thuộc một trong những trường hợp sau:</span></span><br /> </div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Nhân viên của Công ty Cổ phần Công nghệ và thương mại Thành Đạt</span></span></div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Các đối tác có ký hợp đồng thực hiện 1 phần dịch vụ của Công ty. Các đối tác này sẽ nhận được những thông tin theo thỏa thuận hợp đồng (có thể 1 phần hoặc toàn bộ thông tin tuy theo điều khoản hợp đồng) để tiến hành hỗ trợ người dùng sử dụng dịch vụ do Công ty cung cấp.</span></span></div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ của đơn vị thu thập và quản lý thông tin</span></span></h2> <div style="text-align: justify;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(bao gồm cách thức liên lạc để người tiêu dùng có thể hỏi về hoạt động thu thập, xử lý thông tin liên quan đến cá nhân mình)</span></span></em></div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ của đơn vị thu thập và quản lý thông tin:</span></span><br /> </div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Công ty Cổ phần Công nghệ và thương mại Thành Đạt </span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Địa chỉ: số 157 phố Đặng Văn Ngữ, P. Phương Liên, Q. Đống Đa, Tp. Hà Nội</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Điện thoại: 0243 7764930</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Email: tracdiathanhdat@gmail.com<span style="white-space: pre;"> </span></span></span></strong></div> </div> </div> <p style="text-align: justify;"> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Người dùng có thể gọi điện tới tổng đài hỗ trợ và chăm sóc khách hàng </span><strong style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify; margin: 0px; padding: 0px;">0949 322 456</strong><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để điều chỉnh hoặc xóa đi dữ liệu cá nhân của mình.</span><br /> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">6. Cam kết bảo mật thông tin cá nhân khách hàng</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Không bán, chia sẻ hay trao đổi thông tin cá nhân của khách hàng thu thập trên trang web cho một bên thứ ba nào khác.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoại trừ các trường hợp về sử dụng thông tin cá nhân như đã nêu trong chính sách này,chúng tôi cam kết không tiết lộ thông tin cá nhân của bạn ra ngoài. Trong một số trường hợp, chúng tôi có thể thuê một đơn vị độc lập để tiến hành các dự án nghiên cứu thị trường và khi đó thông tin của bạn sẽ được cung cấp cho đơn vị này để tiến hành dự án. Bên thứ ba này sẽ bị ràng buộc bởi một thỏa thuận về bảo mật mà theo đó họ chỉ được phép sử dụng những thông tin được cung cấp cho mục đích hoàn thành dự án.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể tiết lộ hoặc cung cấp thông tin cá nhân của bạn trong các trường hợp thật sự cần thiết như sau: (a) khi có yêu cầu của các cơ quan pháp luật; (b) trong trường hợp mà chúng tôi tin rằng điều đó sẽ giúp chúng tôi bảo vệ quyền lợi chính đáng của mình trước pháp luật.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">7. Thay đổi về chính sách</span></span></span></span></h2> <p style="text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Nội dung của “Chính sách bảo mật” này có thể thay đổi để phù hợp với các nhu cầu của Công Ty CP Công nghệ và Thương Mại Thành Đạt cũng như nhu cầu và sự phản hồi từ khách hàng (nếu có). </span></span></span></span></p> </div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi hiểu rằng quyền lợi của bạn trong việc bảo vệ thông tin cá nhân cũng chính là trách nhiệm của chúng tôi nên trong bất kỳ trường hợp có thắc mắc, góp ý nào liên quan đến chính sách bảo mật, việc thông tin cá nhân bị sử dụng sai mục đích vui lòng liên hệ qua số điện thoại <strong>0949 322 456</strong> hoặc gửi phản hồi về địa chỉ email: <em><strong>tracdiathanhdat@gmail.com.</strong></em><br /> <br /> Trân trọng!</span></span></div> ', 'images' => '202104071236589b665b2accf17da9077cea4c5dad8e94.jpg', 'images_multi' => '', 'pos' => '6', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3920', 'slug' => 'chinh-sach-bao-mat-thong-tin', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '135', 'rght' => '136', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) ) $slideshow = array( (int) 0 => array( 'Slideshow' => array( 'id' => '1158', 'name' => '', 'images' => '202607021457295d6b626c7966fea8ed15b90188f75e84.png', 'created' => '2026-07-02 14:57:29', 'modified' => '2026-07-02 14:57:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 1 => array( 'Slideshow' => array( 'id' => '1157', 'name' => '', 'images' => '20260630144106967d7220891508e0bc589157b72a4a6f.png', 'created' => '2026-06-30 14:41:06', 'modified' => '2026-06-30 14:41:06', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 2 => array( 'Slideshow' => array( 'id' => '1156', 'name' => '', 'images' => '20260627100900c4525d4b0ad85bb7ed6e5f31fbe008ce.png', 'created' => '2026-06-27 10:09:00', 'modified' => '2026-06-27 10:09:00', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 3 => array( 'Slideshow' => array( 'id' => '1153', 'name' => '', 'images' => '2026060910315463c4488ef0eebcd97a80c7be838ec857.png', 'created' => '2026-06-09 10:31:54', 'modified' => '2026-06-09 10:31:54', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 4 => array( 'Slideshow' => array( 'id' => '1151', 'name' => '', 'images' => '20260505105747cef035cfde3d3e4fc486dcc70906dab9.png', 'created' => '2026-05-05 10:57:47', 'modified' => '2026-05-05 10:57:47', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 5 => array( 'Slideshow' => array( 'id' => '1147', 'name' => '', 'images' => '20260504151401463305739b212edcd50d4df28ea21663.png', 'created' => '2026-05-04 15:14:01', 'modified' => '2026-05-04 15:14:01', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 6 => array( 'Slideshow' => array( 'id' => '1111', 'name' => '', 'images' => '2025091214412921cbc3cbc42d3d64fe4364ad8b7a9b7e.png', 'created' => '2025-09-12 14:41:29', 'modified' => '2025-09-12 14:41:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 7 => array( 'Slideshow' => array( 'id' => '1099', 'name' => '', 'images' => '20250707100715baf5ecd84c6a8766519b98f66eec1511.png', 'created' => '2025-07-07 10:07:15', 'modified' => '2025-07-07 10:07:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 8 => array( 'Slideshow' => array( 'id' => '1096', 'name' => '', 'images' => '202504251616158fbd912c821051db2e9e1ebe215c4da4.png', 'created' => '2025-04-25 16:16:15', 'modified' => '2025-04-25 16:16:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 9 => array( 'Slideshow' => array( 'id' => '1055', 'name' => '', 'images' => '202502071107533894de97e081b06e5749a83e6bed2399.png', 'created' => '2025-02-07 11:07:53', 'modified' => '2025-02-07 11:07:53', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 10 => array( 'Slideshow' => array( 'id' => '1008', 'name' => '', 'images' => '20240822084848c3089726a8fff539a5f1adcaaca9cd73.png', 'created' => '2024-08-22 08:48:48', 'modified' => '2024-08-22 08:48:48', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 11 => array( 'Slideshow' => array( 'id' => '961', 'name' => '', 'images' => '202403121029063cfd7328162ff668a881f7e275a1a01d.png', 'created' => '2024-03-12 10:29:08', 'modified' => '2024-03-12 10:29:08', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 12 => array( 'Slideshow' => array( 'id' => '850', 'name' => '', 'images' => '20230605160932d4a880ffcab96141d7a3538bf17255de.png', 'created' => '2023-06-05 16:09:33', 'modified' => '2023-12-25 09:27:46', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 13 => array( 'Slideshow' => array( 'id' => '817', 'name' => '', 'images' => '20230306160629b7490cbbbd5cfd081d8ec1930914a677.png', 'created' => '2023-03-06 16:06:29', 'modified' => '2025-12-23 09:03:28', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 14 => array( 'Slideshow' => array( 'id' => '617', 'name' => '', 'images' => '20220713143712ec1e28dc996e7d39d7535a730ead176e.png', 'created' => '2022-07-13 14:37:12', 'modified' => '2024-12-02 16:11:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ) ) $adv_khuyenmai = array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ) $doitac = array( (int) 0 => array( 'Advertisement' => array( 'id' => '36', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/bosch', 'images' => '20151223081939be7f9ca66f2fb4e760fb991d89d74002.png', 'display' => '3', 'created' => '2015-12-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '33', 'rght' => '34' ) ), (int) 1 => array( 'Advertisement' => array( 'id' => '33', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/pentax', 'images' => '20151216094854d7903c4f5ae6da9780bc88cbb048d417.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '27', 'rght' => '28' ) ), (int) 2 => array( 'Advertisement' => array( 'id' => '16', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/topcon', 'images' => '2015121609180430293457191c29e0d0d7a715d26041bd.png', 'display' => '3', 'created' => '2015-12-10', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '7', 'rght' => '8' ) ), (int) 3 => array( 'Advertisement' => array( 'id' => '27', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/trimple', 'images' => '2015121609470060450f77189189cce8edb27ef59c46d2.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '15', 'rght' => '16' ) ), (int) 4 => array( 'Advertisement' => array( 'id' => '28', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20151216094709d0c1b1d5ffcc17a598904261de69c485.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '17', 'rght' => '18' ) ), (int) 5 => array( 'Advertisement' => array( 'id' => '29', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/kenwood', 'images' => '201512160947288286f4b931bdbc0e64dfd484fc6c12e5.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '19', 'rght' => '20' ) ), (int) 6 => array( 'Advertisement' => array( 'id' => '30', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/nikon', 'images' => '202210171542300b1b7918f461a4dd8d877236543412d8.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '21', 'rght' => '22' ) ), (int) 7 => array( 'Advertisement' => array( 'id' => '34', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sincon', 'images' => '20151216095020f699fb43b225af9cb76ffe022e057faf.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '29', 'rght' => '30' ) ), (int) 8 => array( 'Advertisement' => array( 'id' => '31', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/garmin', 'images' => '201512160948147d3b76212a8ebdd03d45fc49a95a9868.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '23', 'rght' => '24' ) ), (int) 9 => array( 'Advertisement' => array( 'id' => '26', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/leica', 'images' => '20151216094654c3a83e015935188821aa9ee65e6b322f.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '13', 'rght' => '14' ) ), (int) 10 => array( 'Advertisement' => array( 'id' => '25', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sokkia', 'images' => '2015121609464772166f729226cebe52ae986c2699c3a1.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '11', 'rght' => '12' ) ), (int) 11 => array( 'Advertisement' => array( 'id' => '24', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/foif', 'images' => '2015121609482733afba0b93b9383e6ea26a08124e8a76.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '9', 'rght' => '10' ) ), (int) 12 => array( 'Advertisement' => array( 'id' => '54', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424094203a24f4d5a812351010a6355d888b944ec.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '57', 'rght' => '58' ) ), (int) 13 => array( 'Advertisement' => array( 'id' => '55', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '2021042409421996a13aed03c03b49b7d965db5dbcfdd6.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '59', 'rght' => '60' ) ), (int) 14 => array( 'Advertisement' => array( 'id' => '56', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/motorola', 'images' => '20220805103835e45b76131731a737df5e8dec49916375.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '61', 'rght' => '62' ) ), (int) 15 => array( 'Advertisement' => array( 'id' => '57', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/yamayo', 'images' => '20250304144532ee8e939d0c9e884e1a50ad352b272730.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2025-03-04', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '63', 'rght' => '64' ) ), (int) 16 => array( 'Advertisement' => array( 'id' => '58', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424100013ce6e6d048914eccdc312d53e64e566b7.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '65', 'rght' => '66' ) ), (int) 17 => array( 'Advertisement' => array( 'id' => '59', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/geomax', 'images' => '2021051416090922e7bec3a6dfe8041780aa125f5f4932.jpg', 'display' => '3', 'created' => '2021-05-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '67', 'rght' => '68' ) ), (int) 18 => array( 'Advertisement' => array( 'id' => '60', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/south', 'images' => '20210623100351b1da5960a28a9deb6af4e028880d625b.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '69', 'rght' => '70' ) ), (int) 19 => array( 'Advertisement' => array( 'id' => '62', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/e-survey', 'images' => '20211124221103bda9f65e28426fc1f93c4f5f223cd1bc.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-11-24', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '71', 'rght' => '72' ) ), (int) 20 => array( 'Advertisement' => array( 'id' => '68', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hi-target', 'images' => '2021112422134905fc59de564b69bfad9ca0b5f7204ffa.png', 'display' => '3', 'created' => '2021-08-05', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '73', 'rght' => '74' ) ), (int) 21 => array( 'Advertisement' => array( 'id' => '73', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/dji', 'images' => '2021102921504774fd5e8eec5eed69455accd89f7429e5.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '83', 'rght' => '84' ) ), (int) 22 => array( 'Advertisement' => array( 'id' => '74', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/spectra-geospatial-spectra-precision', 'images' => '202110292149162a2a919ea2a12b8255429f33eb51a1a8.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '85', 'rght' => '86' ) ), (int) 23 => array( 'Advertisement' => array( 'id' => '75', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/efix', 'images' => '202207131224432d602a710c7f1a152566aec421d281d7.png', 'display' => '3', 'created' => '2022-07-13', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '87', 'rght' => '88' ) ), (int) 24 => array( 'Advertisement' => array( 'id' => '76', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/chcnav', 'images' => '20220714162725db2138b3dcabb86eedc65c4ba1f6ccce.jpg', 'display' => '3', 'created' => '2022-07-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '89', 'rght' => '90' ) ), (int) 25 => array( 'Advertisement' => array( 'id' => '78', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202208051039345c0c28b21fe05a0c9d4f65b176fe7063.jpg', 'display' => '3', 'created' => '2022-08-05', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '93', 'rght' => '94' ) ), (int) 26 => array( 'Advertisement' => array( 'id' => '79', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202210171541561896d0eb31d272d3d99a9a8c0d3582fa.png', 'display' => '3', 'created' => '2022-10-17', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '95', 'rght' => '96' ) ), (int) 27 => array( 'Advertisement' => array( 'id' => '100', 'name' => null, 'link' => '', 'images' => '20230515143931e088ce1b8d5b9bcf57916a733e5ff5e3.jpg', 'display' => '3', 'created' => '2023-05-15', 'modified' => '2023-05-15', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '117', 'rght' => '118' ) ), (int) 28 => array( 'Advertisement' => array( 'id' => '107', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/bua-dung-cho-khao-sat-dia-chat-estwing-e3-22p.html', 'images' => '20240130151328303b311c40a2276c91bf7e4f0aa460ce.png', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '125', 'rght' => '126' ) ), (int) 29 => array( 'Advertisement' => array( 'id' => '108', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/ong-nhom-celestron-nature-dx-10-42.html', 'images' => '20240130151701574ebc151c3252c2eb93d6504efdc5ab.jpg', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '127', 'rght' => '128' ) ), (int) 30 => array( 'Advertisement' => array( 'id' => '114', 'name' => null, 'link' => '', 'images' => '20250917151944a9ff8314bd4af3bf87c9037dceceff53.png', 'display' => '3', 'created' => '2025-09-17', 'modified' => '2025-09-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '131', 'rght' => '132' ) ) ) $chayphai = array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ) $chaytrai = array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ) $chiasekinhnghiem = array() $list_menu_footer = array() $danhmuc_left_parent_sphot = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc_left_parent = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc = array( (int) 0 => array( 'Catproduct' => array( 'id' => '1', 'name' => 'Trang chủ', 'slug' => 'trang-chu' ) ), (int) 1 => array( 'Catproduct' => array( 'id' => '3', 'name' => 'Giới thiệu ', 'slug' => 'gioi-thieu' ) ), (int) 2 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ), (int) 3 => array( 'Catproduct' => array( 'id' => '5', 'name' => 'Phần mềm - HDSD ', 'slug' => 'phan-mem-hdsd' ) ), (int) 4 => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'slug' => 'kien-thuc-ung-dung' ) ), (int) 5 => array( 'Catproduct' => array( 'id' => '6', 'name' => 'Liên hệ', 'slug' => 'lien-he' ) ) ) $support = array( (int) 0 => array( 'Support' => array( 'id' => '13', 'name' => 'Co so Ha noi', 'phone' => '098 987 678', 'yahoo' => 'duycuong7640', 'skype' => 'duycuong7640', 'pos' => '0', 'created' => '2013-09-13', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ), (int) 1 => array( 'Support' => array( 'id' => '16', 'name' => 'Co so TP.HCM', 'phone' => '3252 436 432', 'yahoo' => 'duycuong7640', 'skype' => 'tuvantubep', 'pos' => '0', 'created' => '2014-01-15', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ) ) $content_for_layout = '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ' $scripts_for_layout = '' $count = (int) 0 $price = (int) 0 $sl = (int) 0 $cap1 = array( 'Catproduct' => array( 'id' => '3', 'name' => 'Giới thiệu ', 'slug' => 'gioi-thieu' ) ) $dm_c2 = array( (int) 0 => array( 'Catproduct' => array( 'id' => '44', 'name' => 'Sửa chữa - Kiểm nghiệm', 'parent_id' => '3', 'alias' => 'sua-chua-kiem-nghiem', 'images' => '', 'lft' => '40', 'rght' => '41', 'pos' => '1', 'status' => '1', 'title_seo' => '', 'meta_key' => '', 'meta_des' => '', 'created' => '2016-01-21', 'modified' => '2016-01-21', 'slug' => 'sua-chua-kiem-nghiem', 'cate' => '4', 'link' => 'gioi-thieu', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Catproduct' => array( 'id' => '45', 'name' => 'Dịch vụ thuê máy', 'parent_id' => '3', 'alias' => 'dich-vu-thue-may', 'images' => '', 'lft' => '42', 'rght' => '43', 'pos' => '2', 'status' => '1', 'title_seo' => '', 'meta_key' => '', 'meta_des' => '', 'created' => '2016-01-21', 'modified' => '2016-01-21', 'slug' => 'dich-vu-thue-may', 'cate' => '4', 'link' => 'gioi-thieu', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) )include - APP/View/Elements/menu.ctp, line 56 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::element() - CORE/Cake/View/View.php, line 424 include - APP/View/Layouts/home.ctp, line 169 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::renderLayout() - CORE/Cake/View/View.php, line 539 View::render() - CORE/Cake/View/View.php, line 483 Controller::render() - CORE/Cake/Controller/Controller.php, line 957 ProductController::chitiet() - APP/Controller/ProductController.php, line 135 ReflectionMethod::invokeArgs() - [internal], line ?? Controller::invokeAction() - CORE/Cake/Controller/Controller.php, line 485 Dispatcher::_invoke() - CORE/Cake/Routing/Dispatcher.php, line 186 Dispatcher::dispatch() - CORE/Cake/Routing/Dispatcher.php, line 161 [main] - APP/webroot/index.php, line 92
Notice (8): Undefined index: name_eng [APP/View/Elements/menu.ctp, line 55]
Code Context
">
<div class="accordion-group"><div class="accordion-heading"><a class="accordion-toggle" <?php if(!empty($dm_c2)){?>data-toggle="collapse" data-parent="#accordion2" href="#collapse<?php echo $cap1['Catproduct']['id'];?>" title="<?php echo $cap1['Catproduct']['name'.LANGUAGE];?>"<?php }else{?>href="<?php echo DOMAIN.$cap1['Catproduct']['slug'];?>"<?php }?>>
$viewFile = '/home/tracdiathanhda/domains/tracdiathanhdat.vn/public_html/app/View/Elements/menu.ctp'
$dataForView = array(
'cat12' => array(
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
'description_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'keywords_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'title_for_layout' => 'Máy kinh vĩ',
'tinmoiup' => array(
(int) 0 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 6 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 7 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 8 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 9 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
)
),
'tinlq' => array(
(int) 0 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 6 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 7 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 8 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 9 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
)
),
'detailNews' => array(
'Post' => array(
'id' => '494',
'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử',
'code' => null,
'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>',
'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li>
</ul>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li>
</ul>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p>
<p>
</p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p>
<p>
</p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li>
</ul>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li>
</ul>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li>
</ul>
<div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;">
<img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div>
',
'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy kinh vĩ',
'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'created' => '2017-09-11',
'modified' => '2026-07-12',
'status' => '1',
'view' => '40085',
'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '19',
'rght' => '20',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
'setting' => array(
'id' => '1',
'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt',
'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'address_eng' => '',
'address' => '<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p>
<p>
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br />
Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p>
<div>
<p>
<strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p>
</div>
<p>
<span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p>
<p>
<span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br />
<br />
<a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p>
',
'contactinfo_eng' => '',
'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br />
<br />
1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br />
2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br />
3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br />
4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br />
5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội',
'contactinfo' => '<div dir="rtl" style="text-align: left;">
<u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div>
<div style="">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br />
Tel: (024) 3776 4930 <br />
Fax: (024) 3776 5908<br />
Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br />
Hotline: <strong>0913 051 734</strong><br />
<br />
<strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br />
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br />
</div>
<div style="">
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div>
<div style="">
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div>
<div style="">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br />
<br />
- 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br />
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div>
',
'telephone' => '01659 014592',
'hotline' => '0913 051 734',
'email' => 'tracdiathanhdat@gmail.com',
'url' => '',
'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ',
'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!',
'created' => '2012-06-05',
'modified' => '1783492910',
'youtube' => 'http://youtube.com',
'twitter' => 'https://twitter.com/',
'myspace' => 'https://myspace.com/',
'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/',
'email2' => 'duycuong7640',
'skype' => 'hothihuyen.hn',
'yahoo' => 'duycuong7640',
'yahoo1' => 'duycuong7640',
'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873',
'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>',
'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux',
'slogan_eng' => '',
'printer' => '',
'googleplus' => '',
'bando' => '<p>
<iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p>
',
'gioithieu' => '<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p>
',
'thongtincongty' => 'Sửa máy lạnh tại nhà
Sửa máy lạnh tại HCM
Sửa tủ lạnh
Bơm ga máy lạnh ',
'trogiupkh' => 'Tai nghe Iphone
Sua may tinh tai nha
Máy Ozone Z755',
'dichvuft' => 'Sửa máy lạnh
Bảo dưỡng máy lạnh
Vệ sinh máy lạnh
Lắp đặt máy lạnh',
'bb' => '',
'zing' => '',
'hotline2' => '0912 35 65 75',
'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script>
<script>
(function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){
(i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o),
m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m)
})(window,document,'script','//www.google-analytics.com/analytics.js','ga');
ga('create', 'UA-72584674-1', 'auto');
ga('send', 'pageview');
</script>
<!-- Global site tag (gtag.js) - Google Ads: 876059345 -->
<script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script>
<script>
window.dataLayer = window.dataLayer || [];
function gtag(){dataLayer.push(arguments);}
gtag('js', new Date());
gtag('config', 'AW-876059345');
</script>
<script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>',
'theh1' => 'thanhdatsurvey.JSC',
'hanoi' => '<div>
<strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div>
<div>
<strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div>
<div>
<strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div>
<div>
<strong>Email </strong>: info@ifes.vn</div>
',
'tphcm' => '<div>
<strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div>
<div>
<strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div>
<div>
<strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div>
<div>
<strong>Email </strong>: info@ifes.vn</div>
',
'tt' => '',
'pp' => 'https://www.facebook.com/ruaxetudong.net',
'tphcm_eng' => '',
'hanoi_eng' => '',
'hotline_eng' => '',
'name_eng' => '',
'chinhsach' => null,
'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>',
'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>',
'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;">
<span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br />
<br />
Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br />
</p>
<span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>',
'gt_eng' => ''
),
'tin_ft' => array(
(int) 0 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Post' => array(
[maximum depth reached]
),
'Catproduct' => array(
[maximum depth reached]
)
)
),
'slideshow' => array(
(int) 0 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 6 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 7 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 8 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 9 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 10 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 11 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 12 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 13 => array(
'Slideshow' => array(
[maximum depth reached]
)
),
(int) 14 => array(
'Slideshow' => array(
[maximum depth reached]
)
)
),
'adv_khuyenmai' => array(
'Advertisement' => array(
'id' => '104',
'name' => null,
'link' => '',
'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png',
'display' => '5',
'created' => '2024-01-16',
'modified' => '2024-06-21',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '121',
'rght' => '122'
)
),
'doitac' => array(
(int) 0 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 6 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 7 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 8 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 9 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 10 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 11 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 12 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 13 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 14 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 15 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 16 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 17 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 18 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 19 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 20 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 21 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 22 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 23 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 24 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 25 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 26 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 27 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 28 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 29 => array(
'Advertisement' => array(
[maximum depth reached]
)
),
(int) 30 => array(
'Advertisement' => array(
[maximum depth reached]
)
)
),
'chayphai' => array(
'Advertisement' => array(
'id' => '50',
'name' => null,
'link' => '',
'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg',
'display' => '2',
'created' => '2021-01-20',
'modified' => '2021-01-20',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '53',
'rght' => '54'
)
),
'chaytrai' => array(
'Advertisement' => array(
'id' => '49',
'name' => null,
'link' => '',
'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg',
'display' => '1',
'created' => '2021-01-20',
'modified' => '2021-01-20',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '51',
'rght' => '52'
)
),
'chiasekinhnghiem' => array(),
'list_menu_footer' => array(),
'danhmuc_left_parent_sphot' => array(
(int) 0 => array(
'Catproduct' => array(
[maximum depth reached]
)
)
),
'danhmuc_left_parent' => array(
(int) 0 => array(
'Catproduct' => array(
[maximum depth reached]
)
)
),
'danhmuc' => array(
(int) 0 => array(
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 2 => array(
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 3 => array(
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 4 => array(
'Catproduct' => array(
[maximum depth reached]
)
),
(int) 5 => array(
'Catproduct' => array(
[maximum depth reached]
)
)
),
'support' => array(
(int) 0 => array(
'Support' => array(
[maximum depth reached]
)
),
(int) 1 => array(
'Support' => array(
[maximum depth reached]
)
)
),
'content_for_layout' => '<style>
@font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal}
#ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative}
#ez-toc-container.selected{
width: 10px;
}
#ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"}
.toc_cap2{
padding-left: 25px!important;
}
.toc_cap3{
padding-left: 50px!important;
}
.ct-tt table.download{
width: 100%!important;
}
.ct-tt a.download{
background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase;
}
.ct-tt table.dangkythamgia{
width: 100%!important;
}
.ct-tt a.dangkythamgia{
padding:10px 20px; background-color: #00ffff;
}
.ct-tt div{max-width: 100%;}
</style>
<div class="bg-cat-danhmuc">
<div class="cat-title-danhmuc">
<a href="" title="">
<h1></h1>
</a>
</div>
</div>
<div class="box-content-detail">
<div class="clear-content"></div><div class="clear-content"></div>
<div class="col-product">
<div class="box-new-content">
<div class="box-new-detail">
<div class="time-date">
12:00:00
<span>11/09/2017</span>
</div><!--end time-date--><div class="clear-content"></div>
<div class="box-like-share">
<div class="like1">
<div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div>
</div>
</div><!--end box-like-share--><div class="clear-content"></div>
<div class="ct-tt">
<style>
#row-2097407503{display: flex;flex-wrap: wrap;}
#row-2097407503 p{
margin-bottom: 20px;
}
.large-4 {
flex-basis: 33.3333333333%;text-align: center;
max-width: 33.3333333333%;margin-bottom: 30px;
}
.large-4 a{
color: #fff;text-transform: uppercase;font-weight:bold;
}
.large-4 .col-inner{padding:0 15px;}
.expand {
display: block;
max-width: 100%!important;
padding-left: 0!important;
padding-right: 0!important;
width: 100%!important;padding:10px;
}
.button.success {
background-color: #4a90e2;
}
.box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover {
transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%);
}
.box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner {
transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s;
}
.box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover {
box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%);
}
.button span {
font-weight: 400;
}
.is-shade:after {
box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%);
}
</style>
<div class="" id="row-2097407503">
<p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p>
<div id="col-680915017" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>Gọi Điện</span>
</a>
</div>
</div>
<div id="col-569433728" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>Nhắn Tin</span>
</a>
</div>
</div>
<div id="col-272138532" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>chat zalo</span>
</a>
</div>
</div>
</div>
<div class="clear-main"></div>
</div><!--end ct-tt-->
<!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>-->
<div class="clear-content"></div><div class="clear-content"></div>
</div><!--end box-new-detail-->
<div class="bar-new-detail">
<label>Private same category</label>
<div class="clear-main"></div>
<ul>
<li>
<a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title="">
<h3> <span>(18-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title="">
<h3> <span>(06-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title="">
<h3> <span>(05-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title="">
<h3> <span>(30-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title="">
<h3> <span>(29-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title="">
<h3> <span>(28-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title="">
<h3> <span>(25-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title="">
<h3> <span>(14-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title="">
<h3> <span>(12-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title="">
<h3> <span>(09-07-2021)</span></h3>
</a>
</li>
</ul>
<div class="clear-main"></div>
</div><!--end bar-new-detail-->
<div class="clear-main"></div>
<div class="pagination">
<span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div>
<div class="clear-main"></div>
</div><!--end box-ctbar-->
</div>
</div>
<script type="text/javascript">
var ToC =
"<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" +
// "<div class='tile_mucluc'><span>Mục lục:</span></div>" +
"<ul class='ez-toc-list ez-toc-list-level-1'>";
var newLine, el, title, link ,id;
$(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() {
el = $(this);
title = el.text();
id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,"");
$(this).attr('id', id);
if($(this).is("h2")){
newLine =
"<li>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
if($(this).is("h3")){
newLine =
"<li class='toc_cap2'>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
if($(this).is("h4")){
newLine =
"<li class='toc_cap3'>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
ToC += newLine;
});
ToC +=
"</ul>" +
"</nav></div><div style='clear:both;'></div>";
$(".ct-tt").prepend(ToC);
$( ".ez-toc-glyphicon" ).toggle(
function() {
$('#ez-toc-container').addClass( "selected" );
$('.menu_danhmuc').hide();
}, function() {
$('#ez-toc-container').removeClass( "selected" );
$('.menu_danhmuc').show();
}
);
</script>
',
'scripts_for_layout' => ''
)
$cat12 = array(
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
)
$description_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)'
$keywords_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)'
$title_for_layout = 'Máy kinh vĩ'
$tinmoiup = array(
(int) 0 => array(
'Post' => array(
'id' => '823',
'name' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật – Những bước quan trọng để đảm bảo độ chính xác',
'code' => null,
'alias' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-–-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập trạm Base RTK đúng cách có quan trọng không? Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Thiết lập trạm Base RTK đúng cách có quan trọng không?<br />
<br />
Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.<br />
<br />
Mặc dù giao diện phần mềm của mỗi hãng có thể khác nhau, quy trình thiết lập Base nhìn chung đều tuân theo các nguyên tắc giống nhau. Dưới đây là các bước cơ bản giúp triển khai một trạm Base RTK ổn định và đáng tin cậy.</em><br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7881291487147_f174a50258d6ad97ccd34f717df81a2b.jpg" style="width: 800px; height: 600px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Chọn vị trí đặt Base</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quan trọng nhất trước khi bật máy. Một vị trí tốt nên đáp ứng các điều kiện sau:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thoáng, có góc quan sát bầu trời rộng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh cây lớn, mái che hoặc công trình cao tầng che khuất vệ tinh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế đặt gần tường kính, mái tôn hoặc mặt nước để giảm hiện tượng phản xạ tín hiệu (Multipath).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh gần đường dây điện cao thế hoặc nguồn phát sóng mạnh nếu có thể.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nền đất hoặc mặt bằng ổn định, ít rung động.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu đặt Base trên mốc khống chế, cần đảm bảo mốc không bị xê dịch trong suốt quá trình đo.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lắp chân máy và định tâm</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi chọn vị trí phù hợp:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở chân máy chắc chắn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều chỉnh chiều cao thuận tiện cho việc thao tác.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định tâm chính xác trên mốc bằng dọi quang học hoặc dọi laser (nếu có).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng bọt thủy theo hướng dẫn của thiết bị.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trường hợp sử dụng chân máy thông thường ngoài hiện trường, nên kiểm tra lại việc định tâm sau khi siết chặt các khóa chân máy vì quá trình thao tác có thể làm lệch vị trí ban đầu.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Đo chiều cao anten</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten là một thông số rất quan trọng. Thông thường, phần mềm sẽ yêu cầu người dùng nhập:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao nghiêng (Slant Height), hoặc</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao đứng (Vertical Height).</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần đo đúng theo phương pháp mà phần mềm yêu cầu.<br />
<br />
> Một số lưu ý:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng thước chuyên dụng nếu có.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo ít nhất hai lần để kiểm tra.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại đơn vị (mét hoặc milimét).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không ước lượng bằng mắt.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc nhập sai chiều cao anten sẽ làm sai tọa độ của trạm Base và có thể ảnh hưởng đến toàn bộ dữ liệu hiệu chỉnh RTK.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Thiết lập tọa độ Base</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quyết định hệ quy chiếu mà Rover sẽ sử dụng. <br />
<br />
4.1 Trường hợp 1: Base đặt trên điểm đã biết tọa độ (<strong>Known Point</strong>)<br />
<br />
Đây là phương pháp được ưu tiên. Người dùng nhập chính xác:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X, Y, H hoặc B, L, H.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ tọa độ tương ứng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi xác nhận, Base sẽ phát dữ liệu hiệu chỉnh dựa trên tọa độ đã biết.<br />
<br />
> Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ tin cậy cao.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với đo địa chính, khảo sát công trình, hoàn công và các công việc yêu cầu liên kết với hệ tọa độ hiện có.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
4.2 Trường hợp 2: <strong>Base Here</strong> (Base tự xác định tọa độ)<br />
<br />
Nếu chưa có mốc khống chế, người dùng có thể để máy tự xác định vị trí hiện tại (Base Here hoặc Autonomous).<br />
Phương pháp này thường được sử dụng khi:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát sơ bộ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập lưới khống chế tạm.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình chưa yêu cầu liên kết với hệ tọa độ chính thức.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu ý rằng tọa độ Base Here chỉ mang tính tương đối. Nếu cần liên kết với hệ tọa độ công trình hoặc VN-2000, nên đo khống chế hoặc sử dụng các phương pháp chuyển đổi phù hợp trước khi triển khai chính thức.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cấu hình truyền dữ liệu cải chính</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Base có tọa độ, cần cấu hình phương thức truyền dữ liệu hiệu chỉnh đến Rover. Hai phương thức phổ biến hiện nay là:<br />
<br />
<strong>5.1 Truyền bằng Radio UHF</strong><br />
<br />
Khi dùng phương thức này cần kiểm tra:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tần số phát.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Băng thông (Bandwidth).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao thức truyền (Protocol).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten UHF đã được lắp đúng.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base và Rover phải sử dụng cùng cấu hình để có thể liên lạc.<br />
<br />
<strong>5.2 Truyền qua Internet (NTRIP)</strong><br />
<br />
Trong trường hợp sử dụng mạng Internet nội bộ hoặc triển khai Base riêng:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra kết nối 4G/5G hoặc Wi-Fi.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra địa chỉ IP hoặc Caster.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Port.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mountpoint.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tài khoản và mật khẩu nếu có.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Kiểm tra trạng thái phát cải chính</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi hoàn tất cấu hình, cần kiểm tra:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base đã bắt đủ số lượng vệ tinh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đã bắt đầu phát dữ liệu cải chính.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không xuất hiện cảnh báo lỗi.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radio hoặc Internet hoạt động ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin hoặc nguồn ngoài đủ cho thời gian làm việc.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các hệ thống Radio, nên kiểm tra thêm cường độ tín hiệu giữa Base và Rover trước khi bắt đầu đo.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Kiểm tra Rover đã FIX ổn định</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Rover kết nối với Base, không nên đo ngay. <br />
<br />
Nên kiểm tra:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm đạt FIX.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lượng vệ tinh ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PDOP ở mức phù hợp.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Age of Correction thấp và ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số RMS hoặc Estimated Precision nằm trong giới hạn cho phép của công việc.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu Rover liên tục chuyển giữa FIX và FLOAT, cần kiểm tra lại:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách đến Base.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu Radio hoặc Internet.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện che khuất vệ tinh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình truyền dữ liệu.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Một số lỗi thường gặp khi thiết lập Base</span></span></h2>
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đặt Base không phù hợp</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt dưới tán cây, gần nhà cao tầng hoặc gần nguồn phản xạ mạnh có thể làm giảm chất lượng quan sát GNSS.</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo sai chiều cao anten</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá phổ biến và có thể ảnh hưởng đến kết quả tính toán tọa độ của trạm Base.</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai tọa độ Base</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ, sai kinh tuyến trục, sai cao độ hoặc nhập nhầm tọa độ sẽ khiến Rover đo sai toàn bộ.</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai cấu hình Radio</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác tần số, giao thức hoặc công suất giữa Base và Rover sẽ khiến Rover không nhận được dữ liệu hiệu chỉnh.</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Di chuyển Base trong khi đang đo</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu chân máy bị dịch chuyển trong quá trình làm việc, toàn bộ kết quả sau thời điểm dịch chuyển đều có thể không còn đảm bảo độ tin cậy và nên được kiểm tra hoặc đo lại.</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguồn điện không đủ</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base mất nguồn hoặc khởi động lại giữa ca đo sẽ làm gián đoạn việc truyền dữ liệu hiệu chỉnh đến Rover.<br />
<br />
>>> Thiết lập Base RTK không chỉ là vài thao tác trên bộ điều khiển mà còn bao gồm việc lựa chọn vị trí đặt máy, định tâm chính xác, nhập đúng chiều cao anten, cấu hình tọa độ và kiểm tra trạng thái hoạt động của toàn bộ hệ thống. Thực hiện đúng các bước ngay từ đầu sẽ giúp Rover nhận dữ liệu hiệu chỉnh ổn định, giảm thời gian xử lý sự cố ngoài thực địa và nâng cao độ tin cậy của kết quả đo.<br />
<br />
Mặc dù tên gọi các chức năng hoặc giao diện có thể khác nhau giữa các hãng, nguyên tắc thiết lập trạm Base về cơ bản vẫn tương tự. Nắm vững các nguyên lý này sẽ giúp người sử dụng dễ dàng làm việc với nhiều dòng RTK khác nhau.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 260626.png" style="width: 800px; height: 533px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Liên hệ ngay <a href="https://zalo.me/0913051734"><span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt qua Zalo</strong></span></a> để được tư vấn chọn máy phù hợp nhất!</span></span><br />
<a class="zalo-float" href="https://zalo.me/0949322456" rel="noopener" target="_blank"> <span class="zalo-icon">Z</span> <span class="zalo-text">Nhắn Zalo</span> </a>
<style type="text/css">
.zalo-float {
position: fixed;
right: 20px;
bottom: 90px;
z-index: 9999;
display: flex;
align-items: center;
gap: 8px;
background: #0068ff;
color: #fff;
padding: 12px 16px;
border-radius: 999px;
font-weight: 700;
font-size: 15px;
text-decoration: none;
box-shadow: 0 8px 24px rgba(0,0,0,0.22);
}
.zalo-float:hover {
transform: translateY(-2px);
opacity: 0.95;
}
.zalo-icon {
width: 28px;
height: 28px;
border-radius: 50%;
background: #fff;
color: #0068ff;
display: flex;
align-items: center;
justify-content: center;
font-weight: 800;
}
@media (max-width: 768px) {
.zalo-float {
right: 14px;
bottom: 80px;
padding: 11px 14px;
font-size: 14px;
}
}</style>
',
'images' => '202606260951032f4d94b16f8c4b40c845fa69fd0c4dc4.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật từ A đến Z',
'meta_key' => '',
'meta_des' => 'Hướng dẫn chi tiết cách thiết lập trạm Base RTK: chọn vị trí, định tâm, đo chiều cao anten, cấu hình Known Point hoặc Base Here, Radio/NTRIP và các lỗi thường gặp.',
'created' => '2026-06-26',
'modified' => '2026-07-12',
'status' => '1',
'view' => '525',
'slug' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '557',
'rght' => '558',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 1 => array(
'Post' => array(
'id' => '822',
'name' => 'Hiểu đúng về RTCM 1021–1027, Helmert (Bursa-Wolf), 7 tham số và chuyển đổi hệ tọa độ',
'code' => null,
'alias' => 'hieu-dung-ve-rtcm-1021–1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàncầu sang hệ tọa độ làm việc tại địa phương.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàn cầu sang hệ tọa độ làm việc tại địa phương.<br />
<br />
Vậy RTK thực chất đo trong hệ nào?<br />
<br />
Máy thu GNSS không đo trực tiếp trong hệ tọa độ VN-2000. Thay vào đó, thiết bị xác định vị trí trong một hệ quy chiếu địa tâm toàn cầu (global geocentric reference frame), chẳng hạn như WGS84 hoặc các realization gần với ITRF (International Terrestrial Reference Frame).<br />
<br />
Trong khi đó, tại Việt Nam, phần lớn bản đồ địa hình, bản đồ địa chính, hồ sơ thiết kế và công trình lại sử dụng hệ tọa độ VN-2000 hoặc hệ tọa độ công trình. <br />
<br />
Vì vậy, trước khi có thể sử dụng ngoài thực địa, kết quả đo GNSS cần được chuyển đổi sang hệ tọa độ làm việc.<br />
<br />
Có thể hình dung quy trình tổng quát như sau: <strong>GNSS/RTK → WGS84 hoặc ITRF (realization cụ thể) → Chuyển đổi hệ quy chiếu và phép chiếu bản đồ (khi cần) → VN-2000 hoặc hệ tọa độ công trình.</strong><br />
<br />
<em>Lưu ý: WGS84 và ITRF đều có nhiều phiên bản (realizations) được cập nhật theo thời gian. Trong hầu hết công việc RTK thông thường, quá trình này đã được phần mềm RTK hoặc dịch vụ CORS xử lý. Tuy nhiên, với các ứng dụng yêu cầu độ chính xác cao hoặc xử lý dữ liệu nhiều thời kỳ, vẫn cần quan tâm đến reference frame và epoch của dữ liệu.</em></span></span><br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. 7 tham số là gì?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trắc địa, một trong những mô hình phổ biến để chuyển đổi giữa hai hệ quy chiếu là phép biến đổi 7 tham số (Seven-Parameter Transformation).<br />
<br />
Bộ tham số gồm: </span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔX: Tịnh tiến theo trục X</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔY: Tịnh tiến theo trục Y</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔZ: Tịnh tiến theo trục Z</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rx: Góc quay quanh trục X</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ry: Góc quay quanh trục Y</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rz: Góc quay quanh trục Z</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Scale: Hệ số tỷ lệ (ppm)</span></span></li>
</ul>
<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/coordtrans datum transformation.gif" style="width: 613px; height: 407px;" /></p>
<br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong đó:<br />
- Ba tham số đầu mô tả sự dịch chuyển giữa hai hệ quy chiếu.</span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ba tham số tiếp theo mô tả sự quay.</span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Tham số cuối cùng mô tả sự khác biệt về tỷ lệ.</span></span></span></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình này giả thiết rằng mối quan hệ giữa hai hệ quy chiếu có thể được biểu diễn bằng một phép biến đổi gồm ba tham số tịnh tiến, ba tham số quay và một tham số tỷ lệ.<br />
<br />
Trong các phần mềm RTK, người dùng có thể gặp nhiều tên gọi như:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Seven Parameters</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Helmert Transformation</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bursa-Wolf Transformation</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Datum Transformation</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư hiện trường, điều quan trọng cần nhớ là: 7 tham số là một mô hình dùng để chuyển đổi giữa hai hệ quy chiếu.<br />
<br />
Trong những khu vực có biến dạng không đồng nhất, mô hình này có thể không đạt độ chính xác cao bằng các phương pháp sử dụng lưới hiệu chỉnh (Grid Shift).<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Bursa-Wolf và Helmert có giống nhau không?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là điểm khá nhiều người nhầm lẫn. Trong nhiều phần mềm RTK, hai tên gọi: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Helmert Transformation & </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Bursa-Wolf Transformation </span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">được sử dụng gần như thay thế cho nhau. <br />
<br />
Tuy nhiên, xét dưới góc độ học thuật, Bursa-Wolf là một quy ước biểu diễn của phép biến đổi Helmert 7 tham số. Sự khác biệt chủ yếu nằm ở quy ước dấu và cách biểu diễn các tham số quay. Đối với phần lớn công việc RTK ngoài thực địa, sự khác biệt này thường không ảnh hưởng đến quá trình sử dụng nếu các tham số được khai báo đúng theo quy ước mà phần mềm yêu cầu.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Ngoài 7 tham số còn có những phương pháp nào?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi phép chuyển đổi tọa độ đều sử dụng mô hình 7 tham số. Một số phương pháp phổ biến khác gồm:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Molodensky–Badekas</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp này cũng sử dụng bảy tham số nhưng thực hiện phép quay quanh một điểm gốc cục bộ (origin point) thay vì tâm Trái Đất. Cách tiếp cận này thường giúp giảm ảnh hưởng của sai số quay trong các hệ tọa độ địa phương.</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Grid Shift</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác với mô hình 7 tham số, Grid Shift không sử dụng một bộ tham số chung cho toàn bộ khu vực mà áp dụng các giá trị hiệu chỉnh được nội suy từ lưới.<br />
<br />
Ví dụ: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">NTv2, </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Geoid Grid</span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với những khu vực có biến dạng không đồng đều, Grid Shift thường cho độ chính xác cao hơn mô hình 7 tham số.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. RTCM 1021–1027 là gì?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM (Radio Technical Commission for Maritime Services) là tiêu chuẩn quốc tế dùng để truyền dữ liệu hiệu chỉnh trong GNSS RTK. <br />
<br />
Khi nhắc đến RTCM, nhiều người chỉ nghĩ đến các bản tin phục vụ quá trình FIX. Tuy nhiên, trong tiêu chuẩn RTCM 3.x còn có nhóm bản tin 1021–1027, được định nghĩa để truyền các thông tin liên quan đến phép biến đổi datum, phép chiếu bản đồ và một số mô hình hiệu chỉnh phục vụ chuyển đổi sang hệ tọa độ địa phương.<br />
<br />
Theo tài liệu của RTCM SC-104 và một số nhà sản xuất phần mềm GNSS, nhóm bản tin này được thiết kế nhằm hỗ trợ việc chuyển đổi từ hệ quy chiếu GNSS sang hệ tọa độ địa phương. <br />
<br />
Tuy nhiên cần lưu ý:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi mạng CORS đều phát các bản tin này.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi bộ thu GNSS hoặc phần mềm RTK đều hỗ trợ đầy đủ việc giải mã và áp dụng các bản tin này.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc triển khai có thể khác nhau giữa các phiên bản RTCM, nhà sản xuất thiết bị và dịch vụ CORS.</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì vậy, không nên mặc định rằng mọi hệ thống CORS đều truyền hoặc sử dụng RTCM 1021–1027.<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/1655118093874(1).jpg" style="width: 600px; height: 450px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Vì sao có phần mềm RTK không cần nhập 7 tham số?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, người dùng không cần nhập thủ công, nhưng điều đó không có nghĩa quá trình chuyển đổi không tồn tại. <br />
<br />
Việc chuyển đổi có thể đã được thực hiện thông qua:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cơ sở dữ liệu CRS tích hợp trong phần mềm hoặc bộ điều khiển;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ffile hệ tọa độ (CRS/Projection) được import;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình do nhà sản xuất thiết lập;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin từ dịch vụ CORS;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc các cơ chế chuyển đổi riêng của phần mềm.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Do đó, việc không phải nhập không đồng nghĩa với không sử dụng phép chuyển đổi.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Khi nào vẫn phải nhập 7 tham số?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số tình huống vẫn cần người dùng thiết lập thủ công, chẳng hạn:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng Base cục bộ;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Llàm việc với hệ tọa độ công trình;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng hệ tọa độ địa phương chưa có trong phần mềm;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu khảo sát cũ;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc làm việc với các dự án có quy định riêng về hệ tọa độ.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, người dùng có thể phải:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập 7 tham số;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Import file hệ tọa độ;</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc thực hiện Site Calibration (Localization).</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. RTCM 1021–1027 có thay thế Site Calibration không?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Câu trả lời là không. Hai khái niệm này phục vụ những mục đích khác nhau.<br />
<br />
RTCM 1021–1027 là nhóm bản tin dùng để truyền các thông tin liên quan đến phép chuyển đổi hệ quy chiếu và phép chiếu bản đồ. Trong khi đó, Site Calibration (Localization) là quá trình thiết lập mối quan hệ giữa hệ tọa độ GNSS và hệ tọa độ của dự án thông qua các điểm khống chế ngoài thực địa.<br />
<br />
Site Calibration không thay thế phép chuyển đổi giữa các hệ quy chiếu mà chỉ hiệu chỉnh cục bộ để phù hợp với hệ tọa độ công trình. Ngay cả khi sử dụng mạng CORS và chọn đúng hệ tọa độ, nhiều dự án vẫn yêu cầu kiểm tra trên các mốc khống chế trước khi tiến hành đo chính thức.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Những lỗi thường gặp ngoài thực địa</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Qua thực tế sử dụng RTK, một số lỗi liên quan đến hệ tọa độ thường gặp gồm:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai kinh tuyến trục.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai múi chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai mô hình geoid.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai datum hoặc realization.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai đơn vị của Rx, Ry, Rz (độ, giây hoặc radian).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai hệ số Scale (ppm hoặc hệ số tỷ lệ).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dùng nhầm hệ tọa độ công trình.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tin tưởng trạng thái FIX nhưng không kiểm tra trên mốc khống chế.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những nguyên nhân có thể khiến tọa độ sai hàng mét, thậm chí hàng chục mét dù máy vẫn báo FIX bình thường.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">9. Người sử dụng RTK cần quan tâm đến điều gì?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với phần lớn công việc khảo sát, địa chính, thi công hoặc hoàn công, người dùng không nhất thiết phải nhớ chi tiết từng bản tin RTCM.<br />
<br />
Điều quan trọng hơn là:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo đúng Job / Project.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng hệ tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng kinh tuyến trục.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng múi chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng mountpoint khi dùng CORS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập đúng chiều cao anten.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại trên mốc khống chế.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ nhìn trạng thái FIX mà bỏ qua cấu hình hệ tọa độ.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu kết quả đo lệch toàn bộ so với bản vẽ hoặc mốc ngoài thực địa, cần kiểm tra lại hệ tọa độ trước khi nghi ngờ máy RTK hoặc tín hiệu vệ tinh.</span></span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
>>> RTCM 1021–1027, Helmert, Bursa-Wolf, 7 tham số và Site Calibration đều liên quan đến quá trình đưa kết quả GNSS về hệ tọa độ làm việc, nhưng chúng không phải là các khái niệm tương đương.</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS xác định vị trí trong hệ quy chiếu toàn cầu, thường là WGS84 hoặc các realization gần với ITRF.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">VN-2000 và hệ tọa độ công trình là các hệ tọa độ làm việc được sử dụng trong khảo sát, thiết kế và thi công tại Việt Nam.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7 tham số (Bursa-Wolf/Helmert) là một trong những mô hình phổ biến dùng để chuyển đổi tọa độ giữa các hệ quy chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM 1021–1027 là nhóm bản tin được thiết kế để hỗ trợ truyền thông tin liên quan đến phép biến đổi tọa độ và phép chiếu bản đồ. Tuy nhiên, việc các bản tin này có được sử dụng hay không còn phụ thuộc vào phiên bản RTCM, hệ thống CORS và phần mềm RTK.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Site Calibration (Localization) là quá trình hiệu chỉnh cục bộ theo các điểm khống chế của dự án và không nên xem là sự thay thế cho các phép biến đổi giữa các hệ quy chiếu.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư khảo sát và thi công, hiểu đúng vai trò của từng khái niệm sẽ giúp cấu hình RTK chính xác hơn, xử lý tốt các tình huống liên quan đến hệ tọa độ và hạn chế các sai lệch không đáng có ngoài thực địa.</span></span><br />
<br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 230626 2.png" style="width: 800px; height: 533px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;"><u><strong>Tài liệu tham khảo</strong></u></span></span><br />
<ul>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">RTCM Special Committee 104 – <em>RTCM Standard for Differential GNSS (Multiple Signal Messages)</em>.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IOGP – <em>Geomatics Guidance Note 7, Coordinate Conversions and Transformations</em>.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">EPSG Geodetic Parameter Dataset & Guidance Note 7-2.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">ISO 19111 – <em>Geographic Information — Referencing by Coordinates</em>.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Carlson Software – <em>RTCM 1021–1027 White Paper</em>.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Leica Geosystems – <em>Captivate Coordinate System Guide</em>.</span></span></li>
</ul>
',
'images' => '20260625150050d64d8db365e7a0f663896871ecf242ce.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'RTK chuyển từ WGS84 sang VN-2000 như thế nào? Giải thích RTCM 1021–1027 và 7 tham số',
'meta_key' => '',
'meta_des' => 'Tìm hiểu cách RTK chuyển đổi từ WGS84 sang VN-2000, bản chất của RTCM 1021–1027, Bursa-Wolf Transformation, Helmert 7 tham số và vai trò của Site Calibration trong GNSS RTK.',
'created' => '2026-06-25',
'modified' => '2026-07-12',
'status' => '1',
'view' => '752',
'slug' => 'hieu-dung-ve-rtcm-1021-1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '555',
'rght' => '556',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 2 => array(
'Post' => array(
'id' => '821',
'name' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân phổ biến và cách khắc phục!',
'code' => null,
'alias' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Với khả năng xác định tọa độ ở độ chính xác mức centimet, RTK đã trở thành công cụ gần như không thể thiếu đối với nhiều kỹ sư. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br />
<br />
Vậy vì sao máy RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Trong điều kiện làm việc phù hợp và khi đạt trạng thái FIX, công nghệ RTK có thể cung cấp tọa độ với độ chính xác ở mức centimet. Chính vì vậy, RTK đã trở thành một trong những công cụ quan trọng đối với nhiều kỹ sư khảo sát và xây dựng. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br />
<br />
Vậy vì sao máy GPS RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.<br />
</em><br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>I. Trạng thái FIX trong RTK là gì?</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công nghệ GNSS RTK, trạng thái FIX (Fixed Solution) là khi bộ thu đã giải được số nguyên chu kỳ sóng mang (<em>Integer Ambiguity</em>). Khi đó, hệ thống có thể xác định tọa độ với độ chính xác ở mức centimet trong điều kiện làm việc phù hợp.<br />
<br />
Thông thường, máy RTK sẽ hiển thị một trong các trạng thái sau:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Single: Định vị độc lập bằng tín hiệu vệ tinh, sai số thường ở mức vài mét.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DGPS/SBAS: Có dữ liệu hiệu chỉnh, độ chính xác được cải thiện so với Single nhưng chưa đạt mức RTK.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Float: Đã nhận dữ liệu cải chính nhưng chưa giải được hoàn toàn số nguyên chu kỳ sóng mang.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX: Định vị RTK với độ chính xác cao, đáp ứng phần lớn yêu cầu của công tác trắc địa.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lưu ý rằng, trạng thái FIX không đồng nghĩa với việc kết quả luôn chính xác tuyệt đối. Độ tin cậy của phép đo còn phụ thuộc vào điều kiện quan sát vệ tinh, môi trường làm việc, cấu hình hệ tọa độ và việc kiểm tra chất lượng số liệu ngoài thực địa.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 3 FIX.png" style="width: 620px; height: 566px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Không đủ vệ tinh hoặc hình học vệ tinh không thuận lợi</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để đạt được nghiệm FIX, máy RTK cần quan sát đồng thời đủ số lượng vệ tinh với sự phân bố hợp lý trên bầu trời. Máy có thể khó FIX hoặc FIX chậm khi làm việc trong các môi trường như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần nhà cao tầng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hẻm sâu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khu vực có nhiều cây lớn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dưới mái che hoặc trong nhà xưởng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa hình núi đá che khuất bầu trời.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài số lượng vệ tinh, chỉ số PDOP (Position Dilution of Precision) cũng ảnh hưởng đáng kể đến khả năng FIX. Dù quan sát được nhiều vệ tinh, nếu hình học vệ tinh không thuận lợi thì thời gian FIX vẫn có thể kéo dài hoặc nghiệm FIX kém ổn định.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 2 FIX.png" style="width: 600px; height: 400px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hiện tượng đa đường tín hiệu (Multipath)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đa đường tín hiệu là một trong những nguyên nhân phổ biến khiến máy RTK khó giữ FIX. Hiện tượng này xảy ra khi tín hiệu GNSS bị phản xạ qua các bề mặt như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tường kính.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhà thép tiền chế.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu kim loại.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xe ô tô hoặc container.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặt nước.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hàng rào thép.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi bộ thu nhận đồng thời tín hiệu trực tiếp và tín hiệu phản xạ, việc xác định pha sóng mang trở nên khó khăn hơn, khiến nghiệm RTK thiếu ổn định.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 5 FIX.png" style="width: 620px; height: 348px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Khoảng cách giữa Base và Rover quá lớn</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong hệ thống RTK Base – Rover truyền thống, khoảng cách giữa hai máy ảnh hưởng trực tiếp đến chất lượng dữ liệu cải chính. Trong điều kiện các yếu tố khác tương đương, khoảng cách giữa Base và Rover càng lớn thì việc giải nghiệm RTK thường càng khó khăn hơn.<br />
<br />
Khi khoảng cách tăng lên:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số tầng điện ly và tầng đối lưu giữa hai điểm tăng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mức độ tương quan của tín hiệu giảm.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian FIX có thể lâu hơn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giữ FIX giảm trong điều kiện khó.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK Network sử dụng CORS (VRS, iMAX hoặc Single Base), người dùng thường không làm việc với một trạm Base duy nhất. Khả năng FIX còn phụ thuộc vào mật độ mạng CORS, thuật toán xử lý của hệ thống và điều kiện quan sát vệ tinh.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 4 FIX.png" style="width: 620px; height: 410px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Kết nối Internet hoặc dữ liệu cải chính không ổn định</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi sử dụng RTK Network thông qua NTRIP, dữ liệu RTCM phải được truyền liên tục từ máy chủ CORS đến Rover. Một số nguyên nhân thường gặp gồm:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sóng 4G/5G yếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Wi-Fi không ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Server CORS bị gián đoạn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Age of Differential tăng cao.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, dữ liệu cải chính có thể bị trễ hoặc gián đoạn. Tùy từng hãng và từng dòng máy, một số thiết bị có thể duy trì nghiệm FIX trong thời gian ngắn nhờ các tính năng như RTK Hold, RTK Keep hoặc các cơ chế tương tự. Tuy nhiên, nếu việc gián đoạn kéo dài, máy thường sẽ chuyển sang FLOAT hoặc SINGLE.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Nhiễu điện từ và nhiễu vô tuyến</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS từ vệ tinh có công suất rất nhỏ khi đến mặt đất nên dễ bị ảnh hưởng bởi các nguồn nhiễu mạnh. Một số nguồn nhiễu thường gặp gồm:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạm BTS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radar.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường dây điện cao thế.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy phát sóng công suất lớn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống radio công nghiệp.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK sử dụng Radio UHF, nhiễu vô tuyến còn có thể làm giảm chất lượng liên lạc giữa Base và Rover.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 6 FIX.png" style="width: 620px; height: 411px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Anten GNSS bị che khuất hoặc lắp đặt chưa phù hợp</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng thu tín hiệu của máy RTK phụ thuộc rất nhiều vào vị trí đặt anten. Một số tình huống có thể làm giảm chất lượng tín hiệu gồm:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đứng quá sát tường.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt gần xe ô tô.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần mái tôn hoặc kết cấu kim loại.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten bị che bởi người đo.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cáp hoặc anten bị hư hỏng.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lựa chọn vị trí đặt máy thông thoáng luôn là một trong những giải pháp đơn giản nhưng mang lại hiệu quả cao.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Điều kiện khí quyển và hoạt động không gian</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS chịu ảnh hưởng của tầng điện ly và tầng đối lưu. Trong các thời điểm như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bão từ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Kp cao.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động điện ly mạnh.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">khả năng FIX có thể giảm so với điều kiện bình thường. Trong đa số trường hợp, mưa nhỏ không phải là nguyên nhân chính gây mất FIX.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 1 FIX.png" style="width: 620px; height: 413px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Firmware hoặc cấu hình máy chưa phù hợp<br />
</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các bản cập nhật firmware mới có thể:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cải thiện thuật toán RTK.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thêm tín hiệu GNSS mới.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khắc phục các lỗi đã được nhà sản xuất ghi nhận.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng khả năng tương thích với các chuẩn RTCM.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, một số cấu hình chưa phù hợp cũng có thể ảnh hưởng đến khả năng FIX, chẳng hạn như:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ bật một số hệ vệ tinh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập góc cắt vệ tinh chưa hợp lý.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai thông số truyền Radio giữa Base và Rover.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Người dùng nên cập nhật firmware theo khuyến nghị của nhà sản xuất và kiểm tra lại cấu hình trước khi làm việc ngoài hiện trường.</span></span><br />
<h3>
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">9. Hiệu năng của từng dòng máy RTK</span></h3>
<br />
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Không phải mọi bộ thu GNSS RTK đều có khả năng làm việc giống nhau. Hiệu năng của thiết bị phụ thuộc vào nhiều yếu tố như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thiết kế anten GNSS.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Chip xử lý tín hiệu.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thuật toán RTK.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Khả năng chống đa đường.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Tốc độ xử lý dữ liệu.</span></span></li>
<li>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Mức độ tối ưu của phần mềm điều khiển.</span></span></li>
</ul>
<br />
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Vì vậy, ngay cả khi làm việc trong cùng điều kiện hiện trường, tốc độ FIX và khả năng giữ FIX giữa các dòng máy cũng có thể khác nhau.</span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10. Máy vẫn FIX nhưng tọa độ bị sai</span></span></h3>
<h3>
</h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi thường bị nhầm với hiện tượng "không FIX". Trong nhiều trường hợp, máy vẫn báo FIX bình thường nhưng tọa độ sai đáng kể do:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai hệ tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mô hình geoid.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai tham số chuyển đổi.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp tình huống này, cần kiểm tra lại cấu hình hệ quy chiếu trước khi nghi ngờ chất lượng tín hiệu GNSS.</span></span><br />
<p style="text-align: center;">
<br />
<img alt="" src="/admin/webroot/upload/image/images/Esurvey.jpg" style="width: 620px; height: 324px;" /></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Làm thế nào để cải thiện khả năng FIX?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để nâng cao khả năng FIX khi đo RTK, người dùng nên:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đo thông thoáng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế làm việc gần các bề mặt phản xạ mạnh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra số lượng vệ tinh và chỉ số PDOP.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo kết nối Internet hoặc Radio ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi chỉ số Age of Differential.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra đúng cấu hình hệ tọa độ trước khi đo.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cập nhật firmware theo khuyến nghị của nhà sản xuất.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra định kỳ anten và phụ kiện.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm trên các điểm khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ dựa vào trạng thái FIX, nên kiểm tra trên mốc khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác. <br />
<br />
>>> Máy GPS RTK không phải lúc nào cũng đạt trạng thái FIX ngay sau khi khởi động. Khả năng FIX phụ thuộc vào nhiều yếu tố như điều kiện quan sát vệ tinh, hiện tượng đa đường, chất lượng dữ liệu cải chính, kết nối Internet hoặc Radio, điều kiện khí quyển, cấu hình thiết bị và môi trường làm việc.<br />
<br />
Trong thực tế, trạng thái FIX là điều kiện cần nhưng chưa phải điều kiện đủ để khẳng định chất lượng kết quả đo. Bên cạnh việc theo dõi trạng thái FIX, người sử dụng vẫn nên kết hợp kiểm tra trên mốc khống chế, đo lặp các điểm quan trọng và đánh giá điều kiện hiện trường nhằm đảm bảo độ tin cậy của số liệu.<br />
<br />
Hiểu rõ các nguyên nhân trên sẽ giúp kỹ sư trắc địa xử lý nhanh các tình huống ngoài thực địa, lựa chọn phương án đo phù hợp và khai thác hiệu quả hơn công nghệ GNSS RTK.</span></span><br />
<br />
<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/TRẮC ĐỊA THÀNH ĐẠT (Logo) (Ảnh bìa Facebook).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 300px;" /></p>
<br />
<br />
<span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ ngay </span><a href="https://zalo.me/0949322456" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><span style="margin: 0px; padding: 0px; color: rgb(255, 102, 0);"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt qua Zalo</strong></span></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để được tư vấn chọn máy phù hợp nhất!</span>',
'images' => '20260625110358e00121db9ef2b0248aadce5ad04f0e9d.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân và cách khắc phục',
'meta_key' => '',
'meta_des' => 'Máy GPS RTK không FIX được hoặc thường xuyên chuyển giữa FIX và FLOAT? Tìm hiểu 10 nguyên nhân phổ biến như vệ tinh, CORS, Internet, Base, nhiễu tín hiệu và cách khắc phục hiệu quả.',
'created' => '2026-06-25',
'modified' => '2026-07-12',
'status' => '1',
'view' => '537',
'slug' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '553',
'rght' => '554',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 3 => array(
'Post' => array(
'id' => '820',
'name' => 'AI trong ngành trắc địa: Công việc nào sẽ được tự động hóa trước?',
'code' => null,
'alias' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span><o:p></o:p></p>
<p data-end="686" data-start="526">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang dần xuất hiện trong nhiều công đoạn của quy trình khảo sát và thành lập bản đồ.</span></span><o:p></o:p></p>
',
'content' => '<p>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span></em><br />
<br />
<o:p></o:p></p>
<p data-end="686" data-start="526">
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, phân loại dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang giúp giảm đáng kể thời gian xử lý dữ liệu và hỗ trợ kỹ sư đưa ra quyết định nhanh hơn. Tuy nhiên, một câu hỏi được nhiều người quan tâm là: </span></span></em><em style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Công việc nào trong ngành trắc địa sẽ được AI tự động hóa trước?</strong></em></p>
<p style="text-align: center;">
</p>
<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/Ai and BIM 2.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 450px; height: 299px;" /></p>
<br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong quá trình khảo sát và thành lập bản đồ, khối lượng dữ liệu thu thập được ngày càng lớn. Một chuyến bay UAV có thể tạo ra hàng nghìn ảnh chụp.<br />
<br />
Một dự án LiDAR có thể tạo ra hàng triệu đến hàng tỷ điểm Point Cloud. <br />
<br />
Các hệ thống quan trắc hiện đại có thể ghi nhận dữ liệu liên tục 24/7.<br />
<br />
Khối lượng dữ liệu này vượt xa khả năng xử lý thủ công của con người. Đây chính là môi trường lý tưởng để AI phát huy hiệu quả. Theo nhiều nghiên cứu gần đây, AI đặc biệt phù hợp với các nhiệm vụ nhận dạng mẫu, phân loại dữ liệu, phát hiện bất thường và tự động hóa các quy trình xử lý lặp lại.</span></span><br />
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">A. AI đang được ứng dụng như thế nào trong trắc địa?</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Xử lý dữ liệu UAV và ảnh viễn thám</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lĩnh vực phát triển nhanh nhất hiện nay. AI có thể hỗ trợ:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng nhà cửa, đường giao thông và cây xanh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động phân loại lớp phủ bề mặt.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện thay đổi địa hình qua nhiều thời điểm.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thành lập bản đồ hiện trạng.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều nghiên cứu đã chứng minh AI có khả năng tự động nhận dạng và trích xuất đối tượng từ ảnh UAV với độ chính xác cao, giúp giảm đáng kể khối lượng công việc số hóa thủ công.</span></span><br />
<br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and UAV.jpg" style="width: 600px; height: 336px;" /></span></span></p>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Xử lý Point Cloud và LiDAR</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong các dự án quét laser mặt đất hoặc UAV LiDAR, việc phân loại Point Cloud thường tiêu tốn rất nhiều thời gian.<br />
AI hiện có thể:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tách điểm mặt đất.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại cây xanh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng công trình xây dựng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo mô hình 3D bán tự động.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số hệ thống hiện nay còn có khả năng xử lý dữ liệu LiDAR gần như theo thời gian thực và tự động phân loại địa vật với mức can thiệp thủ công rất thấp.</span></span><br />
<br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and Lidar.jpg" style="width: 500px; height: 333px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Thành lập và cập nhật bản đồ</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong lĩnh vực GIS và bản đồ, AI đang được ứng dụng để:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động số hóa đối tượng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất ranh giới địa vật.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lỗi dữ liệu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện các bất thường về hình học và thuộc tính.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các nghiên cứu về bản đồ địa chính và bản đồ nền cho thấy AI có tiềm năng rút ngắn đáng kể thời gian thành lập và cập nhật dữ liệu bản đồ.</span></span><br />
<br />
<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/Ai and Mapping(1).jpg" style="width: 600px; height: 300px;" /></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Quan trắc công trình và giám sát biến dạng</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các công trình cầu, đập, nhà cao tầng hoặc mỏ khai thác, dữ liệu quan trắc thường được thu thập liên tục trong thời gian dài AI có thể giúp:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện số liệu bất thường.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi xu hướng chuyển vị.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự báo nguy cơ lún hoặc nghiêng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ cảnh báo sớm.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây được xem là một trong những hướng ứng dụng có tiềm năng lớn vì AI rất giỏi trong việc phát hiện các quy luật ẩn trong tập dữ liệu dài hạn.</span></span><br />
<br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and monitoring.jpg" style="width: 600px; height: 335px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Công việc văn phòng</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu phải lựa chọn một nhóm công việc có khả năng được AI tự động hóa trước trong ngành trắc địa, thì đó có lẽ là các công việc văn phòng mang tính lặp lại và xử lý dữ liệu. Các công việc như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu giữa các định dạng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tổng hợp số liệu đo đạc.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra các lỗi dữ liệu đơn giản.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu, bảng biểu và báo cáo kỹ thuật.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất thông tin từ nhật ký hoặc sổ đo.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại và sắp xếp dữ liệu dự án.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những công việc có quy trình tương đối rõ ràng và ít phụ thuộc vào đánh giá chuyên môn của kỹ sư. Trên thực tế, nhiều phần mềm hiện nay đã bắt đầu tích hợp các tính năng tự động hóa dạng này. AI chỉ đang giúp các quy trình đó trở nên thông minh và hiệu quả hơn.</span></span><br />
<br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ai and office.jpg" style="width: 600px; height: 336px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">B. Công việc nào khó bị AI thay thế?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực tế hiện nay, đây có lẽ là nhóm ứng dụng AI gần gũi nhất với nhiều kỹ sư trắc địa. Thay vì mất hàng giờ để viết các công cụ Excel, Python hoặc VBA, nhiều kỹ sư đã bắt đầu sử dụng AI để hỗ trợ:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Viết chương trình chuyển đổi tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán stakeout tim tuyến, cọc khoan nhồi.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra dữ liệu đo đạc.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển ảnh sổ đo thành bảng tính.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu nghiệm thu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Soạn thảo báo cáo kỹ thuật.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AI không thực hiện thay công việc chuyên môn, nhưng có thể giúp rút ngắn đáng kể thời gian xử lý các công việc lặp lại.<br />
<br />
>>> Nếu GNSS giúp người làm trắc địa đo nhanh hơn, UAV giúp thu thập dữ liệu nhanh hơn thì AI có thể giúp xử lý dữ liệu nhanh hơn.</span></span>
<p data-end="2115" data-start="1963">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong tương lai gần, lợi thế có thể không nằm ở việc ai sử dụng AI hay không, mà nằm ở việc ai biết khai thác AI hiệu quả hơn trong công việc hàng ngày. </span></span><br />
<br />
<strong><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="text-align: justify; margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span></strong></p>
',
'images' => '20260617172058d2979529aed88d220bef4d1f33c5f441.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'AI trong trắc địa: Công việc nào sẽ được tự động hóa trước?',
'meta_key' => '',
'meta_des' => 'AI đang được ứng dụng ngày càng nhiều trong ngành trắc địa, từ xử lý UAV, LiDAR, bản đồ đến lập báo cáo kỹ thuật. Vậy công việc nào sẽ được AI tự động hóa trước? Tìm hiểu trong bài viết này.',
'created' => '2026-06-17',
'modified' => '2026-07-11',
'status' => '1',
'view' => '670',
'slug' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '551',
'rght' => '552',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 4 => array(
'Post' => array(
'id' => '819',
'name' => 'BIM và LiDAR đang dùng những định dạng dữ liệu nào? Giải thích IFC, RVT, NWD, LAS, LAZ từ A-Z',
'code' => null,
'alias' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.</span></span><br />
',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.<br />
<br />
Vậy các định dạng này dùng để làm gì và khác nhau như thế nào?</em></span></span><br />
<br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Nhóm dữ liệu BIM</span></span></h2>
<br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 IFC (Industry Foundation Classes)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC là định dạng trao đổi dữ liệu BIM mở được phát triển bởi buildingSMART. Mục đích chính của IFC là cho phép các phần mềm BIM khác nhau trao đổi mô hình với nhau mà không phụ thuộc vào một hãng phần mềm cụ thể.</span></span><br />
<br />
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>- Ưu điểm:</strong> Không phụ thuộc vào một nhà cung cấp phần mềm cụ thể, hỗ trợ phối hợp giữa nhiều bộ môn và phù hợp cho việc bàn giao, lưu trữ dữ liệu dự án trong thời gian dài.</span></span><br />
<br />
<o:p></o:p></p>
<p data-end="608" data-start="295">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="307" data-start="295">- Hạn chế:</strong> Không phải phần mềm BIM nào cũng hỗ trợ đầy đủ mọi tính năng của IFC. Trong một số trường hợp, các tham số đối tượng, Family phức tạp hoặc dữ liệu chuyên biệt có thể bị mất hoặc thay đổi khi chuyển đổi. Ngoài ra, khả năng tương thích còn phụ thuộc vào phiên bản IFC sử dụng (IFC2x3, IFC4, IFC4.3...).</span></span><br />
<br />
<o:p></o:p></p>
<p data-end="858" data-start="613">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="634" data-start="613">- Ứng dụng thực tế:</strong> IFC thường được sử dụng để trao đổi dữ liệu giữa các bộ môn, bàn giao mô hình BIM cho chủ đầu tư và lưu trữ dữ liệu dự án theo định dạng mở (vendor-neutral), giúp giảm sự phụ thuộc vào một phần mềm hoặc nhà cung cấp cụ thể.</span></span><o:p></o:p></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Autodesk Revit, Tekla Structures, Archicad, Bentley OpenBuildings đều có thể xuất hoặc nhập file IFC nên IFC thường được xem là "ngôn ngữ chung" của BIM.</span></span><br />
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 BCF (BIM Collaboration Format)</span></span></h3>
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">BCF được sử dụng để trao đổi các vấn đề (Issue), bình luận (Comment), góc nhìn (Viewpoint) và vị trí cần xử lý trong mô hình BIM. BCF không chứa mô hình 3D mà chỉ lưu thông tin phục vụ quá trình phối hợp giữa các bên.</span>
<p>
<br />
<strong data-end="337" data-start="325" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Dung lượng nhỏ, dễ chia sẻ và tích hợp với nhiều nền tảng BIM như Autodesk Construction Cloud (BIM 360), Solibri, Tekla BIMsight và các hệ thống quản lý Issue khác. BCF đặc biệt hữu ích trong các cuộc họp phối hợp (Coordination Meeting), kiểm tra va chạm (Clash Detection) và quy trình QA/QC.</span></p>
<p data-end="630" data-start="325">
<br />
<strong data-end="653" data-start="635" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Lưu ý thực tế:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> BCF thường được sử dụng kèm với các file mô hình như IFC, RVT hoặc NWD để người dùng có thể xem đầy đủ bối cảnh của vấn đề. Một ưu điểm quan trọng của BCF là khả năng theo dõi lịch sử xử lý (Traceability), giúp liên kết giữa vấn đề được phát hiện, người phụ trách và các thay đổi được thực hiện trong dự án.</span></p>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 RVT</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RVT là định dạng dự án của Autodesk Revit. Một file RVT có thể chứa:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiến trúc</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống MEP</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin BIM</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số vật liệu</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng BIM được sử dụng rất phổ biến hiện nay.</span></span><br />
<br />
<p data-end="355" data-start="108">
<strong data-end="372" data-start="360" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Lưu giữ đầy đủ tham số đối tượng, lịch sử làm việc, Worksharing và các thông tin thiết kế chi tiết. RVT là định dạng mang lại khả năng làm việc đầy đủ nhất trong môi trường Revit.</span></p>
<p data-end="552" data-start="360">
</p>
<p data-end="808" data-start="557">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="569" data-start="557">Hạn chế:</strong> RVT là định dạng độc quyền (proprietary) của Autodesk. Các phần mềm BIM khác thường không thể đọc hoặc khai thác đầy đủ toàn bộ thông tin trong file RVT. Vì vậy, khi cần phối hợp đa nền tảng, người dùng thường phải xuất sang IFC hoặc NWD.</span></span><br />
</p>
<p data-end="1161" data-start="813">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="831" data-start="813">Lưu ý thực tế:</strong> RVT thường được sử dụng trong nội bộ đơn vị thiết kế hoặc giữa các bên cùng sử dụng Revit. Khi cần trao đổi dữ liệu với chủ đầu tư, nhà thầu hoặc các đơn vị sử dụng phần mềm khác, IFC thường là lựa chọn phổ biến để bàn giao mô hình BIM, trong khi NWD thường được sử dụng cho công tác phối hợp và kiểm tra mô hình trên Navisworks.</span></span></p>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 RFA</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA là định dạng Family của Revit. Family có thể hiểu là thư viện các đối tượng BIM như:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa sổ</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị điện</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị cơ điện</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA tương tự như Block trong AutoCAD nhưng có nhiều thông tin tham số hơn.<br />
<br />
<strong>Ưu điểm</strong>: RFA cho phép mô tả đối tượng bằng các tham số chi tiết như kích thước, vật liệu, mã thiết bị và thông tin kỹ thuật. Nhờ đó, các đối tượng có thể dễ dàng tái sử dụng giữa nhiều dự án khác nhau, đồng thời giúp chuẩn hóa dữ liệu BIM trong doanh nghiệp.<br />
<br />
<strong>Hạn chế</strong>: RFA là định dạng riêng của Revit nên chủ yếu hoạt động trong hệ sinh thái Autodesk. Khi xuất sang IFC, các Family phức tạp có thể bị đơn giản hóa hoặc mất một phần tham số do sự khác biệt giữa các chuẩn dữ liệu BIM.<br />
<br />
<strong>Lưu ý</strong>: Nên tiêu chuẩn hóa thư viện Family trước khi triển khai dự án hoặc bàn giao dữ liệu. Đối với các Family quan trọng, cần quản lý phiên bản (Version Control) và tài liệu hóa các tham số chính để đảm bảo tính nhất quán giữa các bộ môn và các giai đoạn của dự án.</span></span><br />
<br />
<h3>
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.5 RTE</span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTE là định dạng Template của Revit. Đây là file mẫu được sử dụng khi khởi tạo dự án mới nhằm đảm bảo tiêu chuẩn hóa:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Family</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy ước đặt tên</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số dự án</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/BIM 2(1).jpg" style="width: 662px; height: 463px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Nhóm dữ liệu Navisworks</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 NWD</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD là định dạng mô hình tổng hợp của Autodesk Navisworks. File NWD có thể chứa:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều mô hình BIM</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Clash Detection</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Markup</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu phối hợp</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng thường được sử dụng trong các cuộc họp BIM hoặc bàn giao mô hình.</span></span>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 NWC</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWC là định dạng trung gian của Navisworks. File NWC thường nhẹ hơn NWD và được sử dụng để tăng tốc quá trình nạp mô hình.<br />
Nhiều dự án BIM sử dụng NWC làm định dạng trao đổi nội bộ giữa các bộ môn.</span></span><br />
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.3 NWV</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWV là định dạng Viewpoint của Navisworks. Nó lưu các thông tin về:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái hiển thị</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thiết lập quan sát mô hình</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với NWD hoặc NWC, NWV ít được sử dụng hơn.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Navisworks.jpg" style="width: 680px; height: 392px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Nhóm dữ liệu Point Cloud</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 LAS (LASer File Format)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS là định dạng tiêu chuẩn lưu trữ dữ liệu Point Cloud từ công nghệ LiDAR. Mỗi điểm trong file LAS có thể chứa:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Y</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Z</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Intensity</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GPS Time</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Classification</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Màu RGB</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS thường được tạo ra từ: UAV LiDAR; Mobile Mapping; SLAM Scanner; Máy quét laser mặt đất (TLS); LiDAR hàng không. Một file LAS có thể chứa từ hàng triệu đến hàng trăm triệu điểm.</span></span><br />
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 LAZ</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAZ là phiên bản nén của LAS. Tương tự như DXF, DWG; ZIP và thư mục dữ liệu. <br />
<br />
LAZ giúp giảm đáng kể dung lượng lưu trữ nhưng vẫn giữ nguyên thông tin Point Cloud. Hiện nay phần lớn các dự án LiDAR đều sử dụng LAZ để tối ưu dung lượng và tốc độ truyền dữ liệu.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lidar format.jpg" style="width: 565px; height: 353px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. So sánh nhanh các nhóm dữ liệu</span></span></h2>
<br />
<table border="1" cellpadding="0" cellspacing="3" style="width: 100%">
<tbody>
<tr>
<td style="width: 128px; text-align: center;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nhóm dữ liệu</strong></span></span></td>
<td style="width: 160px; text-align: center;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Định dạng phổ biến</strong></span></span></td>
<td style="width: 212px; text-align: center;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Mục đích</strong></span></span></td>
</tr>
<tr>
<td style="width:128px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ điểm</span></span></td>
<td style="width:160px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td>
<td style="width:212px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý điểm đo, stakeout</span></span></td>
</tr>
<tr>
<td style="width:128px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CAD</span></span></td>
<td style="width:160px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF, DWG</span></span></td>
<td style="width:212px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Bản vẽ kỹ thuật 2D/3D</span></span></td>
</tr>
<tr>
<td style="width:128px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">BIM</span></span></td>
<td style="width:160px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC, RVT, RFA, RTE, BCF</span></span></td>
<td style="width:212px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình công trình số</span></span></td>
</tr>
<tr>
<td style="width:128px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Navisworks</span></span></td>
<td style="width:160px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD, NWC, NWV</span></span></td>
<td style="width:212px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Phối hợp và kiểm tra mô hình</span></span></td>
</tr>
<tr>
<td style="width:128px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Cloud</span></span></td>
<td style="width:160px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS, LAZ</span></span></td>
<td style="width:212px;">
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu quét laser và LiDAR</span></span></td>
</tr>
</tbody>
</table>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Sự phát triển của BIM, UAV LiDAR và công nghệ quét laser 3D đang làm thay đổi cách dữ liệu được tạo ra và sử dụng trong ngành xây dựng.<br />
<br />
Nếu CSV và DXF vẫn là những định dạng quen thuộc đối với kỹ sư đo đạc thì IFC, RVT, NWD hay LAS đang trở thành những định dạng ngày càng phổ biến trong các dự án hiện đại.<br />
<br />
Việc hiểu được chức năng của từng loại dữ liệu sẽ giúp kỹ sư lựa chọn đúng định dạng, trao đổi thông tin hiệu quả hơn và tránh nhiều sai sót trong quá trình triển khai dự án.</span></span><br />
<br />
<h2 data-end="2546" data-start="2275" id="lien-he-trac-dia-thanh-dat-de-duoc-tu-van-giai-phap-phu-hop-voi-tung-loai-cong-trinh" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span><br />
<br />
<span style="display: none;"> </span><span style="display: none;"> </span><img alt="" src="/admin/webroot/upload/image/images/bim 5.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; color: rgb(34, 34, 34); width: 678px; height: 452px;" /><span style="display: none;"> </span><span style="display: none;"> </span></h2>
<p>
</p>
',
'images' => '2026061315274748a34b386d28d2887f07eb97a60c9540.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Ngoài CSV và DXF: Tìm hiểu các định dạng IFC, RVT, NWD, LAS trong BIM và quét laser 3D',
'meta_key' => '',
'meta_des' => 'iFC, RVT, NWD, LAS, LAZ là gì? Tìm hiểu các định dạng dữ liệu BIM, Navisworks và Point Cloud phổ biến trong xây dựng, đo đạc, UAV LiDAR và quét laser 3D.',
'created' => '2026-06-13',
'modified' => '2026-07-12',
'status' => '1',
'view' => '810',
'slug' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '549',
'rght' => '550',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 5 => array(
'Post' => array(
'id' => '818',
'name' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?',
'code' => null,
'alias' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<p>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></p>
<p>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></p>
',
'content' => '<p>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></em></p>
<p>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></em></p>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Từ cuộc đua vệ tinh đến cuộc đua trải nghiệm ngoài thực địa</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng 10 năm trước, khi một hãng giới thiệu thế hệ máy GNSS RTK mới, những thông số thường được nhắc đến nhiều nhất là:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi được bao nhiêu kênh vệ tinh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ những hệ thống GNSS nào.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX nhanh hơn bao nhiêu giây.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao hơn bao nhiêu milimet.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời điểm đó, đây thực sự là những yếu tố tạo nên sự khác biệt giữa các sản phẩm trên thị trường. Các hãng liên tục nâng số lượng kênh từ vài trăm lên hàng nghìn kênh. Những hệ thống mới như Galileo, BeiDou hay QZSS lần lượt được bổ sung. Công nghệ xử lý tín hiệu cũng ngày càng hoàn thiện.<br />
<br />
Tuy nhiên, khi nhìn vào thị trường hiện nay, có thể thấy cuộc đua đó đang dần thay đổi. Hầu hết các dòng RTK hiện đại đều đã hỗ trợ đa hệ vệ tinh, đa tần số và có khả năng đạt độ chính xác centimet trong điều kiện làm việc bình thường. Khi khoảng cách công nghệ về phần cứng GNSS ngày càng thu hẹp, các hãng bắt đầu tìm kiếm một hướng đi mới - Đó là nâng cao trải nghiệm làm việc ngoài thực địa.<br />
</span></span>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Điều mà kỹ sư đo đạc thực sự quan tâm là gì?</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với người sử dụng máy RTK ngoài công trường, câu hỏi quan trọng nhất thường không phải: "Máy này theo dõi được bao nhiêu vệ tinh?" mà là:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi hoàn thành công việc nhanh hơn không?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi đo được những vị trí khó không?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm được thời gian đi lại ngoài hiện trường không?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm số lượng thiết bị phải mang theo không?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp công việc an toàn hơn không?</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây chính là lý do nhiều công nghệ mới xuất hiện trong vài năm gần đây.<br />
<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. IMU – Bước thay đổi đầu tiên</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một trong những cải tiến có ảnh hưởng lớn nhất là công nghệ IMU. Trước đây, việc giữ sào GNSS thẳng đứng gần như là yêu cầu bắt buộc.<br />
Những vị trí như: chân tường, góc công trình, mép hàng rào hay khu vực cây cối thường gây khó khăn cho người đo. Nhưng IMU đã thay đổi hoàn toàn cách làm việc này. Người sử dụng có thể nghiêng sào trong một phạm vi nhất định mà vẫn duy trì được độ chính xác cao.<br />
<br />
Ngày nay, bù nghiêng gần như đã trở thành tính năng tiêu chuẩn trên các dòng RTK mới.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (1).png" style="width: 680px; height: 383px;" /></span></span></p>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Camera – Khi RTK bắt đầu "nhìn thấy" hiện trường</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau IMU, các hãng tiếp tục đưa camera lên Rover GNSS. Ban đầu, nhiều người cho rằng đây chỉ là một tính năng mang tính trình diễn công nghệ.<br />
Tuy nhiên, thực tế camera đã mở ra nhiều ứng dụng mới:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhận hiện trạng công trình.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo điểm từ ảnh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout bằng thực tế tăng cường (AR).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại dữ liệu sau khi khảo sát.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này giúp RTK không chỉ cung cấp tọa độ mà còn lưu giữ được bối cảnh thực tế của hiện trường.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (2).png" style="width: 680px; height: 678px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Laser Survey – Xu hướng đáng chú ý nhất hiện nay</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu IMU giúp người dùng đo nghiêng và camera giúp ghi nhận hình ảnh, thì Laser Survey đang hướng tới một mục tiêu khác. Đó là đo được những vị trí mà trước đây Rover GNSS khó hoặc không thể tiếp cận.<br />
Hãy hình dung một số tình huống quen thuộc mà anh em có thể gặp khi trực tiếp đo ngoài công trình: <br />
- Mép taluy cao.<br />
- Hồ điều hòa.<br />
- Bờ kênh.<br />
- Hố đào sâu.<br />
- Mái nhà.<br />
- Tường chắn.<br />
- Khu vực đang thi công nguy hiểm.<br />
<br />
Với RTK truyền thống, muốn lấy tọa độ chính xác, người đo thường phải đưa sào đến tận vị trí cần đo. Điều này không phải lúc nào cũng thuận lợi hoặc an toàn. Laser Survey ra đời để giải quyết vấn đề đó. Thay vì đưa anten GNSS đến điểm đo, người sử dụng chỉ cần hướng tia laser đến mục tiêu. Phần mềm sẽ kết hợp dữ liệu từ GNSS, IMU và laser để tính toán tọa độ của điểm cần khảo sát.</span></span><br />
<p data-end="1209" data-start="1006">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tất nhiên, việc đo các vị trí khó tiếp cận bằng tia laser không phải là điều hoàn toàn mới trong ngành đo đạc. Máy toàn đạc điện tử đã sử dụng công nghệ đo không gương (Reflectorless) từ nhiều năm trước. Điểm khác biệt là Laser Survey đang đưa khả năng này lên nền tảng Rover GNSS, cho phép người dùng vừa khai thác ưu thế định vị vệ tinh ngoài hiện trường, vừa thực hiện các phép đo từ xa trong những tình huống mà trước đây thường phải kết hợp thêm máy toàn đạc hoặc các thiết bị khác.</span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lý do nhiều chuyên gia nhận định rằng Laser Survey có thể là một trong những bước phát triển đáng chú ý nhất của Rover GNSS trong những năm gần đây.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/i85-gnss-imu-dual-cameras-laser-land-surveying.jpg" style="width: 472px; height: 354px;" /></span></span></p>
<br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>6. Vì sao các hãng TQ đầu tư mạnh vào hướng đi này?</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một lý do quan trọng là thị trường đã thay đổi. Trước đây, người mua thường so sánh:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu kênh vệ tinh?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu tần số?</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác bao nhiêu milimet?</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngày nay, người dùng bắt đầu quan tâm nhiều hơn đến các yếu tố như:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Năng suất làm việc.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trải nghiệm sử dụng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính linh hoạt ngoài thực địa.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giải quyết các tình huống thực tế.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này khiến các hãng phải chuyển hướng nghiên cứu: không chỉ phát triển bộ thu GNSS tốt hơn, mà còn phải tìm cách giúp người dùng làm việc hiệu quả hơn.<br />
</span></span>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>7. RTK đang dần trở thành nền tảng tích hợp cảm biến</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu quan sát sự phát triển của các thế hệ RTK gần đây, có thể thấy một xu hướng rất rõ. RTK không còn đơn thuần là thiết bị thu tín hiệu vệ tinh mà nó đang trở thành một nền tảng tích hợp nhiều cảm biến:<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IMU.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Laser.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công nghệ xử lý hình ảnh.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thuật toán tự động hóa và trí tuệ nhân tạo (AI).</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi công nghệ đều nhằm giải quyết một khó khăn cụ thể ngoài công trường.</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image(1).png" style="width: 680px; height: 680px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Có thể nói, khi khả năng thu tín hiệu GNSS giữa các thế hệ thiết bị ngày càng tiệm cận nhau, cuộc cạnh tranh của các hãng đang dần chuyển sang một hướng mới: giúp kỹ sư hoàn thành công việc nhanh hơn, an toàn hơn và thuận tiện hơn ngoài thực địa.</span></span>
<p data-end="2546" data-start="2275">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera, IMU và Laser Survey có thể chỉ là những bước khởi đầu cho xu hướng đó. Trong tương lai, GNSS RTK nhiều khả năng sẽ không chỉ là thiết bị định vị vệ tinh, mà sẽ trở thành một nền tảng tích hợp nhiều cảm biến phục vụ công tác khảo sát và thi công ngoài hiện trường. </span></span><br />
</p>
<h2 data-end="2546" data-start="2275">
<span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt </strong></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">để được tư vấn và hỗ trợ tốt nhất!</span></h2>
',
'images' => '2026061214390046f6215956d7c46255d00263c715c9d4.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng Trung Quốc chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?',
'meta_key' => '',
'meta_des' => 'Khám phá xu hướng phát triển mới của các hãng GNSS RTK như CHCNAV, eSurvey và nhiều thương hiệu khác. Từ IMU, Camera đến Laser Survey, cuộc đua công nghệ đang chuyển từ phần cứng GNSS sang nâng cao trải nghiệm làm việc ngoài thực địa.',
'created' => '2026-06-12',
'modified' => '2026-07-11',
'status' => '1',
'view' => '778',
'slug' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '547',
'rght' => '548',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 6 => array(
'Post' => array(
'id' => '817',
'name' => 'Định dạng file RTK: Hướng dẫn xuất, nhập và xử lý lỗi thường gặp trong đo đạc',
'code' => null,
'alias' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.</span></span>',
'content' => '<p>
<em><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong thực tế, công việc đo đạc không kết thúc khi Rover báo FIX hoặc khi hoàn thành việc thu thập tọa độ ngoài hiện trường. Sau bước đo đạc, dữ liệu thường phải trải qua nhiều công đoạn như:</span></em><br />
</p>
<ul>
<li>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển về văn phòng.</span></span></em></li>
<li>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biên tập trên AutoCAD hoặc CASS.</span></span></em></li>
<li>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý trên Civil 3D, Trimble Business Center (TBC), Leica Infinity.</span></span></em></li>
<li>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra trên Google Earth.</span></span></em></li>
<li>
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển giao cho chủ đầu tư hoặc đơn vị thiết kế.</span></span></em></li>
</ul>
<br />
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ cần xuất sai định dạng hoặc thiếu dữ liệu, toàn bộ quy trình phía sau có thể bị gián đoạn. Theo tài liệu của Trimble Business Center, hệ sinh thái khảo sát hiện nay hỗ trợ rất nhiều định dạng khác nhau như CSV, TXT, DXF, DWG, KML, SHP, XML, JOB, RINEX... phục vụ các mục đích sử dụng khác nhau.<br />
</span></span></em>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/61sq3Qk7zvL.jpg" style="width: 600px; height: 600px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Các định dạng file dữ liệu phổ biến ở máy RTK</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 CSV (*.csv)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV (Comma Separated Values) là định dạng được sử dụng nhiều nhất trong công tác đo đạc hiện nay. Thông thường file CSV có thể chứa:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số hiệu điểm (Point ID)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting (X)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing (Y)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation (H)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Code</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi chú</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ: </strong></u> Point,X,Y,H,Code<br />
P1,234567.123,1234567.456,15.234,COTDIEN</em><br />
<br />
<u><strong>Ưu điểm</strong></u></span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở được bằng Excel.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dung lượng nhỏ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ gửi Email, Zalo.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ nhập vào Civil 3D, AutoCAD, QGIS, TBC.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><u><strong>Nhược điểm</strong></u></span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có tiêu chuẩn cấu trúc thống nhất.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hai file CSV có thể chứa các trường dữ liệu khác nhau.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Leica Captivate và CHCNAV LandStar, người dùng có thể tự định nghĩa cấu trúc CSV xuất ra bằng cách thêm hoặc bớt các trường dữ liệu cần thiết.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên.png" style="width: 480px; height: 480px;" /> </span></span></p>
<p style="text-align: center;">
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ví dụ về File tọa độ mốc</span></span></em></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 TXT (*.txt)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">TXT là file dữ liệu dạng văn bản thuần và thường được sử dụng khi:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển dữ liệu giữa các phần mềm.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập dữ liệu stakeout.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉnh sửa thủ công bằng Notepad hoặc Notepad++.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ưu điểm lớn nhất là khả năng tùy biến cấu trúc dữ liệu.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 DAT (*.dat)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT là định dạng quen thuộc với nhiều đơn vị thành lập bản đồ địa hình với nhiều ứng dụng như:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AutoCAD.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CASS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập bản đồ địa hình.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại Việt Nam, DAT vẫn là định dạng được sử dụng rất nhiều trong công tác đo vẽ địa hình.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 DXF (*.dxf)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF là định dạng trao đổi dữ liệu CAD. Theo Leica Captivate, DXF được sử dụng để chuyển trực tiếp điểm, đường, layer và các đối tượng CAD giữa hiện trường và văn phòng.<br />
<br />
<strong><u>Ưu điểm</u></strong></span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở trực tiếp trên AutoCAD.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không cần nhập tọa độ thủ công.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giữ được nhiều thông tin bản vẽ.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5 KML (*.kml)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML là định dạng của Google Earth với nhiều ứng dụng như:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra vị trí điểm ngoài thực địa.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối chiếu dữ liệu khảo sát.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ nhanh vị trí công trình.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Trimble, KML/KMZ là một trong những định dạng phổ biến để trao đổi dữ liệu tọa độ địa lý 3D.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.6 SHP (*.shp)</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP (Shapefile) là định dạng GIS được sử dụng trong:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">QGIS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ArcGIS.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống quản lý dữ liệu không gian.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica Captivate còn cho phép xuất thêm các trường chất lượng điểm đo và thông tin tọa độ vào Shapefile.<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7 XLS / XLSX</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số phần mềm cho phép xuất trực tiếp sang Excel với ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ chỉnh sửa.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ lập bảng tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp cho hồ sơ hoàn công.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Khi nào nên chọn CSV, DAT, DXF hay SHP?</span></span></h2>
<br />
<table border="0" cellpadding="0" style="width: 100%">
<tbody>
<tr>
<td>
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mục đích</span></span></strong><br />
</td>
<td>
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng khuyến nghị</span></span></strong><br />
</td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gửi tọa độ cho chủ đầu tư</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, XLSX</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập AutoCAD</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT, DXF</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập Civil 3D</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Google Earth</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GIS</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout công trình</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td>
</tr>
<tr>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ dữ liệu nhanh</span></span></td>
<td>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV</span></span></td>
</tr>
</tbody>
</table>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/c64e8674de5294e51c9bd4133e27d964aede72fb_2_1024x516.png" style="width: 600px; height: 302px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Hướng dẫn xuất dữ liệu trên máy RTK</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù giao diện giữa Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay Matesurvey (Geomate) có khác nhau nhưng quy trình cơ bản tương đối giống nhau với các bước như sau:<br />
<br />
- <strong>Bước 1</strong>: Mở Project hoặc Job cần xuất.<br />
<br />
- <strong>Bước 2</strong>: Kiểm tra danh sách điểm đã lưu.<br />
<br />
- <strong>Bước 3</strong>:Chọn Export Data.<br />
<br />
- <strong>Bước 4</strong>: Chọn định dạng: <em>CSV; ;TXT; DAT; DXF; KML ; SHP</em><br />
<br />
- <strong>Bước 5</strong>: Kiểm tra cấu trúc dữ liệu xuất. Một số phần mềm cho phép tùy chỉnh:<br />
<em>Point ID<br />
Easting<br />
Northing<br />
Elevation<br />
Code<br />
Rod Height<br />
Antenna Height<br />
PDOP<br />
Trạng thái FIX/FLOAT</em><br />
<br />
- <strong>Bước 6</strong>: Lưu file và kiểm tra lại trước khi gửi.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Hướng dẫn nhập dữ liệu vào máy RTK</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài việc xuất dữ liệu từ máy RTK, nhu cầu nhập dữ liệu vào máy để phục vụ công tác bố trí công trình (Stake Out), dẫn đường hoặc kiểm tra tọa độ cũng rất phổ biến. Hiện nay hầu hết các phần mềm đo đạc như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey), MateSurvey (Geomate) đều hỗ trợ nhập các định dạng phổ biến như:CSV (*.csv); TXT (*.txt); DXF (*.dxf). Trong đó CSV là định dạng được sử dụng nhiều nhất.<br />
<br />
<strong>- Bước 1: </strong>Chuẩn bị File dữ liệu<br />
Xuất dữ liệu từ:AutoCAD; Civil 3D; Excel; QGIS; TBC; Leica Infinityvề định dạng CSV hoặc TXT.<br />
<br />
<strong>- Bước 2: </strong>Chép File vào sổ tay<br />
Có thể thực hiện bằngcáp USB, bluetooth, Wi-Fi, đồng bộ Cloud (tùy thiết bị).<br />
<br />
<strong>- Bước 3: </strong>Nhập dữ liệu<br />
Project > Import > Chọn định dạng file > Chọn file cần nhập.<br />
<br />
<strong>- Bước 4: </strong>Khai báo cấu trúc dữ liệu<br />
Đây là bước quan trọng nhất.Người dùng cần khai báo chính xác:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Point ID</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Easting (X)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Northing (Y)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Elevation (H)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Code</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Leica Captivate và Trimble Access, khi nhập dữ liệu cần kiểm tra chính xác thứ tự cột dữ liệu để tránh sai lệch tọa độ.<br />
</span></span><br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Những lỗi thường gặp khi nhập và xuất dữ liệu RTK</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù việc xuất và nhập dữ liệu trên các phần mềm như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay MateSurvey (Geomate) tương đối đơn giản, nhưng thực tế ngoài công trường vẫn thường xuyên phát sinh các lỗi làm mất thời gian xử lý dữ liệu hoặc thậm chí ảnh hưởng đến kết quả thi công.<br />
Dưới đây là những lỗi phổ biến nhất.</span></span><br />
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.1 Xuất file thành công nhưng mở ra không có dữ liệu</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá nhiều người dùng RTK từng gặp với các biểu hiện như:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File được tạo thành công.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có tên dự án hoặc tiêu đề file.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có điểm tọa độ bên trong.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường gặp:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Project hoặc Job.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Data File.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đang bật bộ lọc dữ liệu (Filter).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai loại điểm cần xuất.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Database không chứa dữ liệu.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br />
- Kiểm tra lại Point Database.<br />
- Kiểm tra đúng Project đang làm việc.<br />
- Tắt các bộ lọc dữ liệu trước khi xuất.<br />
- Chọn xuất toàn bộ điểm (All Points).<br />
</span></span><br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.2 File đuôi .CSV mở ra bằng excel nhưng hiển thị trống hoặc sai cột</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biểu hiện thường thấy:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File vẫn có dung lượng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel mở được nhưng dữ liệu dồn vào một cột.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tưởng rằng file bị lỗi hoặc mất dữ liệu.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel đọc sai dấu phân cách dữ liệu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File sử dụng dấu "," trong khi máy tính đang cấu hình dấu ";" hoặc ngược lại.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mã hóa ký tự (Encoding).</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br />
- Mở thử bằng Notepad hoặc Notepad++.<br />
- Sử dụng chức năng Import Data / From Text trong Excel.<br />
- Kiểm tra lại dấu phân cách dữ liệu.<br />
</span></span><br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.3 CSV của người khác có nhiều cột hơn hoặc ít cột hơn</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều người cho rằng CSV là định dạng cố định. Thực tế không phải vậy. Một file CSV có thể chỉ chứa:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point ID ( Số hiệu điểm)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting ( Tọa đọ X)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing ( Tọa độ Y)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation ( Cao độ)</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài các trường dữ liệu cơ bản như <strong>Số hiệu điểm, Tọa độ X, Tọa độ Y và Cao độ H</strong>, nhiều phần mềm RTK còn cho phép xuất thêm các thông tin như:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mã điểm (Code)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao sào (Rod Height)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao ăng-ten (Antenna Height)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số PDOP</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm (Fix Status)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc phương vị (Azimuth)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô tả hoặc ghi chú điểm (Description)</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân là do cấu hình định dạng xuất dữ liệu của từng phần mềm hoặc từng đơn vị sử dụng. Đây không phải lỗi dữ liệu.<br />
</span></span><br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.4 Nhập dữ iệu thành công nhưng điểm nằm sai vị trí</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi nguy hiểm nhất vì rất khó phát hiện nếu không kiểm tra lại.<br />
<br />
Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhầm thứ tự cột X và Y.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục VN-2000.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai đơn vị tọa độ.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ:</strong></u><br />
Đúng: Point,X,Y,H<br />
P1,234567.123,1234567.456,10.123<br />
<br />
Sai: Point,Y,X,H<br />
P1,1234567.456,234567.123,10.123</em><br />
<br />
Kết quả là điểm có thể xuất hiện cách vị trí thực hàng chục hoặc hàng trăm kilomet.<br />
<br />
<strong>Cách xử lý:</strong><br />
- Kiểm tra lại cấu trúc file.<br />
- Kiểm tra đúng thứ tự Easting và Northing.<br />
- Kiểm tra hệ tọa độ công trình.<br />
- Đối chiếu với một điểm khống chế đã biết.<br />
</span></span><br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.5 Nhập dữ liệu thành công nhưng không nhìn thấy điểm</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lúc này máy báo nhập dữ liệu thành công, danh sách điểm vẫn có nhưng không nhìn thấy điểm trên bản đồ.<br />
<br />
Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nằm ngoài phạm vi hiển thị.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai Projection.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br />
- Zoom Extents.<br />
- Kiểm tra lại hệ tọa độ.<br />
- Kiểm tra lại Projection và KTT.<br />
</span></span><br />
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.6 Nhập dữ liệu định dạng DXF nhưng không hiển thị đối tượng</span></span></h3>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lỗi này xảy ra do những nguyên nhân như:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer đang tắt.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF không tương thích.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng nằm ngoài vùng hiển thị.</span></span></li>
</ul>
<br />
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cách xử lý:</span></span></strong><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Layer.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thử lưu lại DXF phiên bản thấp hơn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Zoom Extents để kiểm tra toàn bộ bản vẽ.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
>>> CSV, TXT, DAT, DXF, KML hay SHP đều là những định dạng dữ liệu quan trọng trong công tác đo đạc hiện đại. Không có định dạng nào là "tốt nhất" cho mọi trường hợp. Lựa chọn đúng định dạng xuất dữ liệu sẽ giúp:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thời gian xử lý văn phòng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế lỗi chuyển đổi dữ liệu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả phối hợp giữa khảo sát, thiết kế và thi công.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm rủi ro mất dữ liệu hoặc bàn giao sai định dạng.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế hiện nay, CSV vẫn là định dạng phổ biến nhất nhờ tính linh hoạt, dễ sử dụng và khả năng tương thích với hầu hết các phần mềm đo đạc, CAD và GIS.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/588632958_1241954074621445_1455996422080404648_n.jpg" style="width: 747px; height: 420px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>',
'images' => '2026060609425746cdab6ee8d08331f2369b4b04a4a4d5.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Định dạng file RTK: CSV, DAT, DXF, KML, SHP và Cách Xuất, Nhập Dữ Liệu',
'meta_key' => '',
'meta_des' => 'Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.',
'created' => '2026-06-06',
'modified' => '2026-07-12',
'status' => '1',
'view' => '877',
'slug' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '545',
'rght' => '546',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 7 => array(
'Post' => array(
'id' => '816',
'name' => 'Sửa chữa máy thủy bình bị rơi, va đập – Nguyên nhân gây đo sai ngoài công trường',
'code' => null,
'alias' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-–-nguyen-nhan-gay-do-sai-ngoai-cong-truong',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br />
Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br />
<br />
Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy. Đây được xem như “trái tim” của máy thủy bình tự động.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850337449414_cbf23e5b4edf679eed8636152be1bb10.jpg" style="width: 600px; height: 800px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cụm cân bằng tự động hoạt động theo nguyên lý trọng lực với hệ thống con lắc treo bằng dây cực nhỏ kết hợp cơ cấu giảm dao động từ tính để giữ tia ngắm luôn nằm ngang. Nhờ đó máy có thể tự cân bằng nhanh và cho độ chính xác cao ngoài công trường. Tuy nhiên, cấu tạo này cũng khá nhạy với va đập. Chỉ một cú rơi hoặc vận chuyển mạnh cũng có thể gây các lỗi như:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Liệt rung cụm compensator.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhảy rung hoặc kẹt rung.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xoắn hoặc lệch dây treo con lắc.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i lớn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả khác nhau.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số cao độ tăng bất thường.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế sửa chữa, phần lớn các trường hợp máy thủy bình đo sai sau va đập đều liên quan trực tiếp đến cụm cân bằng tự động.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850429563246_858468dda57655643001cdc5b7476042.jpg" style="width: 600px; height: 800px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Một số dấu hiệu nhận biết máy thủy bình bị sai sau va đập</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi máy thủy bình bị rơi, va đập hoặc vận chuyển mạnh, nếu xuất hiện các dấu hiệu dưới đây thì nên kiểm tra ngay cụm cân bằng tự động bên trong máy:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả chênh lệch bất thường.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng một vị trí nhưng đo nhiều lần ra số khác nhau.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số rất lớn, thậm chí lệch đến hàng mét.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy vẫn đọc mia bình thường nhưng cao độ không ổn định.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi lắc nhẹ máy không còn nghe tiếng rung “roong roong” êm như lúc mới mua.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, cụm con lắc bên trong đã bị:<br />
<br />
• Liệt rung<br />
• Kẹt rung<br />
• Xoắn dây treo<br />
• Hoặc mất khả năng cân bằng tự động<br />
<br />
Điều nguy hiểm là bên ngoài máy vẫn có thể hoạt động “có vẻ bình thường”, khiến người dùng khó phát hiện nếu không kiểm tra sai số trước khi thi công. Vì vậy, sau mỗi lần máy bị va đập, nên kiểm tra sai số góc i hoặc test đo đi – đo về trước khi tiếp tục sử dụng ngoài công trường.<br />
<br />
Khuyến nghị sau khi thiết bị bị va đập:</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy và ốc cân bằng bằng cách quay máy 180° để quan sát độ dịch chuyển bọt thủy.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai số góc i bằng phương pháp hai mia hoặc thử nghiệm đối chiếu.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không tiếp tục đo công trình khi chưa xác định chính xác tình trạng thiết bị.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm.</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì chỉ một máy bị lệch cũng có thể truyền sai số cho toàn bộ số liệu ngoài công trường.</span></span><br />
<br />
<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (6).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 420px;" /></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Qui trình sửa chữa máy thủy bình tại Trắc địa Thành Đạt</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bước 1: Tiếp nhận và kiểm tra tổng thể thiết bị.<br />
Bước 2: Kiểm tra cụm treo con lắc và cụm cân bằng tự động.<br />
Bước 3: Báo lỗi, báo giá sửa chữa và hiệu chỉnh.<br />
Bước 4: Cân chỉnh cụm compensator — công đoạn quan trọng nhất.<br />
Bước 5: Hiệu chỉnh sai số góc i.<br />
Bước 6: Kiểm tra thực địa sau sửa chữa.<br />
Bước 7: Dán tem kiểm nghiệm trước khi bàn giao cho khách hàng.<br />
<br />
Một máy thủy bình bị lệch không chỉ làm sai một điểm đo… mà có thể truyền sai số cho toàn bộ tuyến hoặc số liệu ngoài công trường.</span></span><br />
<br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Q&A - Kiểm tra máy thủy bình/ thủy chuẩn sau khi bị rơi, va đập</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy thủy bình bị rơi/ va đập có cần kiểm tra lại không?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Đây là bước rất quan trọng trước khi tiếp tục thi công vì chỉ một sai lệch nhỏ trên máy thủy bình cũng có thể ảnh hưởng đến toàn bộ số liệu cao độ ngoài công trường. Nhiều trường hợp máy vẫn đọc mia bình thường nhưng thực tế tia ngắm đã bị sai lệch sau va đập.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi bị rơi máy thủy bình thường gặp những lỗi gì?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số lỗi phổ biến gồm:<br />
• Lệch bọt thủy.<br />
• Sai số góc i lớn.<br />
• Liệt rung hoặc nhảy rung cụm cân bằng tự động.<br />
• Nhìn mia hoặc mục tiêu không rõ.<br />
• Hư ốc cân bằng, vi động hoặc đế máy.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình bị lệch bọt thủy?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường do vận chuyển không đúng cách hoặc máy bị tác động mạnh khiến hệ thống cân bằng thay đổi vị trí, dẫn đến máy khó cân bằng hoặc cân bằng nhưng số đo không ổn định.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sai số góc i trên máy thủy bình là gì?</em></span></span></h3>
<p class="isSelectedEnd">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i là tình trạng tia ngắm không còn nằm ngang chuẩn. Khi đó đo đi – đo về có thể cho kết quả khác nhau và sai số cao độ tăng bất thường. Đây là lỗi rất phổ biến sau khi máy thủy bình bị va đập.</span></span></p>
<h3 style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/Sai số góc i.png" style="width: 665px; height: 295px;" /></h3>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>“Liệt rung” hoặc “nhảy rung” là gì?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi liên quan đến cụm cân bằng tự động (Automatic Compensator) bên trong máy thủy bình. Cụm con lắc bên trong có thể bị: đứt dây treo, xoắn dây, kẹt rung hoặc lệch cơ cấu giảm dao động từ tính. <br />
Khi đó máy không còn tự cân bằng chính xác dù vẫn có thể đọc mia bình thường.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850459087569_e24952711404d15f27d74612fb6b68f7.jpg" style="width: 460px; height: 219px;" /></span></span></p>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Dây rung máy thủy bình</em></span></span></p>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình nhìn mia không rõ sau va chạm?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân có thể do:<br />
<br />
• Kính bị bẩn hoặc trầy xước.<br />
• Hệ thống lấy nét bị ảnh hưởng.<br />
• Cụm quang học bị lệch sau va đập.<br />
<br />
Nếu không kiểm tra sớm có thể ảnh hưởng trực tiếp đến độ chính xác đo đạc.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy bị hư ốc cân bằng hoặc đế máy có nghiêm trọng không?</em></span></span></h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Nếu máy bị rơi mạnh, các bộ phận cơ khí như: vi động, ốc cân bằng, đế máy… có thể bị cong, nứt hoặc biến dạng khiến việc cân bằng và đo đạc không còn chính xác như ban đầu.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi máy thủy bình bị rơi nên làm gì?</em></span></span></h3>
<p class="isSelectedEnd">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy, kiểm tra sai số góc i và cụm con lắc tự động trước khi tiếp tục đo công trình. </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm để tránh truyền sai số cho toàn bộ số liệu thi công. </span></p>
<br />
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<strong style="margin: 0px; padding: 0px; font-weight: bold;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><a href="https://zalo.me/0913051734">Trắc Địa Thành Đạt</a> – Cung cấp máy thủy bình chính hãng!</span></span></strong></p>
<br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Hotline: <strong style="margin: 0px; padding: 0px; font-weight: bold;">0913 051 734 / 0942 288 388</strong></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Địa chỉ: 145 Láng Hạ – Đống Đa – Hà Nội<br style="margin: 0px; padding: 0px;" />
Fanpage: Trắc Địa Thành Đạt</span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>',
'images' => '20260521180410f10bb16a2b4a9dbcb155bfe047377890.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Sửa Chữa Máy Thủy Bình Bị Rơi, Va Đập – Nguyên Nhân Gây Đo Sai & Cách Khắc Phục!',
'meta_key' => '',
'meta_des' => 'Máy thủy bình bị rơi, va đập dễ gây liệt rung, nhảy rung, sai số góc i và đo cao độ sai. Tìm hiểu nguyên nhân, dấu hiệu nhận biết và quy trình sửa chữa – hiệu chỉnh máy thủy bình tại Trắc Địa Thành Đạt.',
'created' => '2026-05-21',
'modified' => '2026-07-12',
'status' => '1',
'view' => '910',
'slug' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-nguyen-nhan-gay-do-sai-ngoai-cong-truong',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '543',
'rght' => '544',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 8 => array(
'Post' => array(
'id' => '815',
'name' => 'Đo hầm bằng máy toàn đạc: So sánh Tunnel App Leica và giải pháp của các hãng khác',
'code' => null,
'alias' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi nói đến đo hầm bằng máy toàn đạc, thách thức lớn nhất không nằm ở thao tác đo… mà ở việc kiểm soát sai số và tiến độ thi công ngay tại hiện trường.</span></span>',
'content' => '<p>
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong các công trình hầm, metro hoặc hạ tầng ngầm, đo hầm bằng máy toàn đạc là phương pháp gần như bắt buộc do không thể sử dụng GNSS. </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tuy nhiên, thách thức lớn nhất không nằm ở việc đo được điểm, mà là kiểm soát sai số và phát hiện sai lệch kịp thời ngay tại hiện trường. Nếu sai số chỉ được phát hiện sau khi xử lý dữ liệu tại văn phòng, việc hiệu chỉnh sẽ trở nên tốn kém và ảnh hưởng trực tiếp đến tiến độ thi công. </span><br />
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chính vì vậy, các hãng thiết bị trắc địa đã phát triển nhiều giải pháp khác nhau nhằm hỗ trợ kỹ sư kiểm soát tốt hơn trong quá trình đo hầm.</span></p>
<p>
</p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Tunnel App trên máy toàn đạc Leica FlexLine</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 Tunnel App là gì?</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tunnel App là module phần mềm tích hợp trong hệ điều hành FlexField trên các dòng máy toàn đạc Leica FlexLine như TS03 và TS07.<br />
<br />
Ứng dụng này cho phép người dùng:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nạp dữ liệu thiết kế tuyến và biên dạng hầm</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực hiện stakeout trực tiếp ngoài hiện trường</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo profile và kiểm tra đào – đắp (cut & fill)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh sai lệch với thiết kế ngay trên máy</span></span></li>
</ul>
<h3>
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.2 Ưu điểm của Tunnel App</span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với phương pháp đo truyền thống, Tunnel App mang lại một số lợi ích rõ rệt:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thao tác trung gian giữa hiện trường và văn phòng</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hiển thị sai lệch trực quan theo biên dạng hầm</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ phát hiện sai số ngay trong quá trình đo</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng tốc độ thi công và kiểm tra</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nổi bật của Leica là khả năng tích hợp toàn bộ workflow ngay trên thiết bị, phù hợp với các công trình cần triển khai nhanh ngoài hiện trường.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Quy trình đo hầm ngoài công trường</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị của Leica, Trimble, Topcon hay các hãng khác, quy trình đo hầm bằng máy toàn đạc ngoài công trường về bản chất vẫn tuân theo một nguyên tắc chung: t<strong>hiết lập đúng – bố trí đúng – kiểm tra liên tục.</strong><br />
<br />
Bước đầu tiên và quan trọng nhất là <strong>thiết lập trạm máy</strong>. Kỹ sư trắc địa cần đặt máy tại vị trí khống chế đã biết tọa độ và định hướng bằng phương pháp <strong>backsight hoặc resection</strong>. Độ chính xác của bước này có ảnh hưởng trực tiếp đến toàn bộ tuyến hầm, bởi chỉ cần sai lệch nhỏ ở định hướng ban đầu cũng có thể dẫn đến sai số tích lũy theo chiều dài công trình.<br />
<br />
Sau khi trạm máy được thiết lập chính xác, dữ liệu thiết kế sẽ được nạp vào hệ thống. Các thông tin bao gồm tim tuyến (alignment), lý trình và biên dạng hầm (cross-section) đóng vai trò làm cơ sở để thực hiện stakeout ngoài thực địa. Ở giai đoạn này, việc kiểm tra lại hệ tọa độ, đơn vị và hướng tuyến là cần thiết nhằm tránh các sai sót do nhập liệu hoặc chuyển đổi dữ liệu.<br />
<br />
Trong quá trình thi công, các điểm đặc trưng của biên dạng hầm sẽ được bố trí trực tiếp ngoài hiện trường thông qua máy toàn đạc. Người đo sẽ lần lượt xác định vị trí các điểm theo thiết kế và hướng dẫn thi công đào hầm theo đúng hình học yêu cầu. Tuy nhiên, việc “bố trí đúng” chưa phải là bước cuối cùng.<br />
<br />
Khâu kiểm tra mới là yếu tố quyết định chất lượng. Các điểm sau khi bố trí cần được đo lại và so sánh với thiết kế bằng các phép đo lặp hoặc thông qua các công cụ kiểm tra trên máy. Việc này giúp phát hiện sớm các sai lệch về vị trí, cao độ hoặc hình dạng biên dạng hầm, từ đó kịp thời điều chỉnh trước khi sai số bị tích lũy.</span></span><br />
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/LGS_streamline_tunnel_construction_and_maintenance_2480x750.jpg" style="width: 800px; height: 242px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế, nhiều sai số lớn trong thi công hầm không đến từ thiết bị, mà đến từ việc không kiểm tra hoặc kiểm tra quá muộn. Vì vậy, một quy trình đo hầm hiệu quả luôn phải đảm bảo nguyên tắc: đo đến đâu, kiểm tra đến đó.<br />
<br />
Sự khác biệt giữa các hãng thiết bị hiện nay chủ yếu nằm ở mức độ hỗ trợ người dùng trong từng bước của quy trình này. Tuy nhiên, dù sử dụng công nghệ nào, cốt lõi của đo hầm bằng máy toàn đạc vẫn không thay đổi: <strong>Thiết lập chuẩn – dữ liệu đúng – kiểm tra liên tục.</strong></span></span> <br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. So sánh các giải pháp đo hầm của các hãng</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Leica – All-in-one tại hiện trường</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica là hãng đi theo hướng tích hợp toàn bộ quy trình đo hầm vào một ứng dụng duy nhất. Tunnel App giúp người dùng thực hiện liên tục các bước từ nạp dữ liệu, bố trí đến kiểm tra ngay tại hiện trường mà không cần phụ thuộc nhiều vào xử lý hậu kỳ.<br />
Phù hợp với:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình thi công nhanh</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đội thi công cần thao tác đơn giản, trực quan.</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica App Tunnel 3.jpg" style="width: 800px; height: 428px;" /></span></span></p>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Trimble – Hệ sinh thái và xử lý thiết kế</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trimble sử dụng phần mềm Trimble Access kết hợp với module Tunnels chuyên dụng. Giải pháp này tập trung vào khả năng:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý alignment phức tạp</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối với phần mềm thiết kế như TBC</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý dữ liệu trong các dự án lớn</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự án metro, hầm quy mô lớn</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu đồng bộ BIM</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Trimple tunnel.jpg" style="width: 800px; height: 446px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Topcon – Linh hoạt theo workflow</span></span></h3>
<p style="text-align: center;">
</p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không giống Leica, <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu-topcon-gm-50-series.html">Topcon</a> không phát triển một module “Tunnel App” riêng biệt cho dòng máy toàn đạc. Thay vào đó, hãng lựa chọn hướng tiếp cận linh hoạt hơn thông qua phần mềm <strong>MAGNET Field</strong>. Trong thực tế, công tác đo hầm bằng máy toàn đạc Topcon được thực hiện bằng cách kết hợp nhiều chức năng sẵn có như alignment, stakeout, offset và kiểm tra profile.<br />
<br />
<strong>Workflow điển hình trên Topcon</strong><br />
<br />
Người dùng sẽ bắt đầu bằng việc nạp dữ liệu tuyến (alignment) và các thông số thiết kế vào phần mềm. Sau khi thiết lập trạm máy, quá trình stakeout được thực hiện thông qua các điểm tuyến và các khoảng lệch (offset) theo biên dạng hầm. <br />
Đối với kiểm tra hình học, kỹ sư thường đo lại các điểm trên biên dạng thực tế và so sánh với thiết kế thông qua các công cụ kiểm tra trong phần mềm hoặc xử lý hậu kỳ.<br />
<br />
<strong>Ưu điểm của cách tiếp cận này</strong><br />
<br />
Điểm mạnh lớn nhất của Topcon là tính linh hoạt. Người dùng có thể tùy biến quy trình đo theo từng loại công trình mà không bị giới hạn bởi một module cố định. Điều này đặc biệt hữu ích trong các dự án có yêu cầu đặc thù hoặc khi dữ liệu thiết kế không theo một chuẩn cố định.<br />
<br />
<strong>Hạn chế cần lưu ý</strong><br />
<br />
Tuy nhiên, việc không có một module tunnel chuyên dụng cũng đồng nghĩa với việc:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy trình đo phụ thuộc nhiều vào kinh nghiệm người sử dụng,</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc kiểm tra sai số không trực quan bằng các hệ thống tích hợp,</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần hiểu rõ workflow để tránh sai sót trong quá trình triển khai.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nói cách khác, Topcon không làm “ít hơn”, nhưng yêu cầu người dùng phải “hiểu nhiều hơn”.</span></span><br />
<br />
<h3 style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel.jpg" style="text-align: center; font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 800px; height: 533px;" /></h3>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.4 Nikon / Sokkia – Phương pháp truyền thống</span></span></h3>
<p style="text-align: center;">
</p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các dòng máy của Nikon và Sokkia chủ yếu sử dụng phương pháp truyền thống:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout cơ bản</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo và kiểm tra thủ công</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giải pháp này vẫn đáp ứng tốt các công trình quy mô nhỏ, nhưng hạn chế khi cần xử lý các dự án phức tạp.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Sự khác biệt cốt lõi trong đo hầm và yếu tố ảnh hưởng tới độ chính xác</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm khác biệt quan trọng nhất giữa các giải pháp không nằm ở khả năng đo, mà nằm ở thời điểm phát hiện sai số.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp truyền thống: phát hiện sai sau khi đo</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm tích hợp (Tunnel App, Tunnels Module): phát hiện sai ngay trong quá trình đo</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc phát hiện sai số sớm giúp giảm chi phí hiệu chỉnh và hạn chế rủi ro trong thi công.<br />
</span></span>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Những yếu tố ảnh hưởng đến độ chính xác</strong></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị hay phần mềm nào, độ chính xác trong đo hầm vẫn phụ thuộc vào:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định hướng trạm máy (backsight)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện môi trường ảnh hưởng đến đo EDM</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số truyền tọa độ</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kỹ năng và thao tác của người sử dụng</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các phần mềm hiện đại chỉ đóng vai trò hỗ trợ, không thể thay thế hoàn toàn quy trình kiểm soát kỹ thuật ngoài công trường.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel 2.jpg" style="width: 800px; height: 415px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Đo hầm bằng máy toàn đạc đã có sự chuyển dịch rõ rệt từ phương pháp thủ công sang các giải pháp tích hợp và trực quan hơn. Tunnel App của Leica là một ví dụ điển hình cho xu hướng đưa việc kiểm soát sai số xuống ngay tại hiện trường. Trong khi đó, các hãng khác như Trimble, Topcon hay Nikon lựa chọn những hướng tiếp cận khác nhau, phù hợp với từng loại công trình và nhu cầu sử dụng.<br />
Tuy nhiên, yếu tố quan trọng nhất vẫn là: Hiểu đúng quy trình đo và chủ động kiểm soát sai số trong suốt quá trình thi công<br />
<br />
Nếu bạn cần tư vấn lựa chọn máy toàn đạc hoặc giải pháp đo hầm phù hợp với công trình, liên hệ ngay với chúng tôi!<br />
<br />
<span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt – Luôn đồng hành cùng bạn!</strong></span><br />
</span></span>',
'images' => '202604231558382137741e17c2868ead929b32a270f9f6.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Đo hầm bằng máy toàn đạc: Leica Tunnel App và các hãng khác',
'meta_key' => '',
'meta_des' => 'Tìm hiểu cách đo hầm bằng máy toàn đạc Leica với Tunnel App và so sánh với Trimble, Topcon, Nikon. Quy trình, ưu nhược điểm và cách kiểm soát sai số ngoài công trường.',
'created' => '2026-04-23',
'modified' => '2026-07-12',
'status' => '1',
'view' => '1482',
'slug' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '541',
'rght' => '542',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 9 => array(
'Post' => array(
'id' => '814',
'name' => 'Máy toàn đạc điện tử: ĐO CHUẨN – BỐ TRÍ NHANH – ỔN ĐỊNH NGOÀI CÔNG TRƯỜNG!',
'code' => null,
'alias' => 'may-toan-dac-dien-tu-do-chuan-–-bo-tri-nhanh-–-on-dinh-ngoai-cong-truong',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br />
Tại <strong>Trắc Địa Thành Đạt</strong>, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br />
<br />
Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.<br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Vì sao máy toàn đạc vẫn là thiết bị không thể thay thế?</span></span></h2>
<br />
<p data-end="216" data-start="105">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong điều kiện thi công thực tế tại Việt Nam, nhiều khu vực thường gặp hạn chế về khả năng đo GNSS, chẳng hạn:</span></span></p>
<ul data-end="407" data-start="218">
<li data-end="296" data-section-id="3ju1r3" data-start="218">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không gian bị che khuất bởi nhà cao tầng, công trình dày đặc hoặc tầng hầm</span></span></li>
<li data-end="337" data-section-id="k3xm0j" data-start="297">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu vệ tinh yếu hoặc nhiễu mạnh</span></span></li>
<li data-end="407" data-section-id="utqol9" data-start="338">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Yêu cầu độ chính xác cao đến milimet trong quan trắc và hoàn công.</span></span></li>
</ul>
<p data-end="491" data-start="409">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong những trường hợp này, máy toàn đạc vẫn là giải pháp hiệu quả và ổn định nhờ:</span></span></p>
<ul data-end="665" data-start="493">
<li data-end="553" data-section-id="1rjirb8" data-start="493">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng đo khoảng cách chính xác cao bằng công nghệ EDM</span></span></li>
<li data-end="594" data-section-id="1tziawf" data-start="554">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phụ thuộc vào tín hiệu vệ tinh</span></span></li>
<li data-end="665" data-section-id="rakyqa" data-start="595">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm soát chặt chẽ công tác bố trí điểm và thi công ngoài thực địa.</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hai chức năng cốt lõi của máy toàn đạc</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 Đo điểm (Measurement)</span></span></h3>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là chức năng cơ bản và quan trọng nhất của máy toàn đạc trong công tác khảo sát. Máy thực hiện đo các yếu tố hình học gồm:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc ngang (Horizontal Angle)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc đứng (Vertical Angle)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách (EDM – Electronic Distance Measurement)</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ các giá trị này, hệ thống sẽ tính toán và xác định tọa độ không gian của điểm đo dưới dạng (X, Y, Z).<br />
<br />
Ngoài ra, máy toàn đạc hiện đại còn hỗ trợ:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo không gương (Non-prism) trong điều kiện khó tiếp cận</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu trữ và quản lý dữ liệu điểm đo trực tiếp trên máy</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xuất dữ liệu phục vụ xử lý nội nghiệp (CAD, TBC, Civil 3D…)</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát địa hình, đo vẽ bản đồ</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo hiện trạng công trình, kiểm tra kích thước</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lập lưới khống chế và thu thập dữ liệu phục vụ thiết kế</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica-Nova-TS60-BC-facing-right.jpg" style="width: 750px; height: 258px;" /></span></span><span style="display: none;"> </span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 Bố trí điểm (Stakeout)</span></span></h3>
<p data-end="1067" data-start="941">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí điểm là quá trình chuyển thông tin từ bản vẽ thiết kế ra vị trí ngoài thực địa, đóng vai trò quan trọng trong thi công.</span></span></p>
<p data-end="1114" data-start="1069">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựa trên tọa độ thiết kế, hệ thống thực hiện:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh tọa độ thiết kế với vị trí thực tế của gương (prism)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán sai lệch theo các phương</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn người đo di chuyển theo các chỉ dẫn:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trái / phải</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tiến / lùi</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lên / xuống</span></span></li>
</ul>
</li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhờ đó, điểm ngoài thực địa được đưa về đúng vị trí thiết kế với độ chính xác cao.<br />
<br />
Ngoài ra, các dòng máy hiện nay còn hỗ trợ:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí tuyến, cung tròn (Road / Arc stakeout)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí theo lưới, theo tim trục</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai lệch sau thi công (As-built check)</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định vị tim trục công trình</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí móng, cột, dầm, sàn</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thi công hạ tầng, giao thông, công trình kỹ thuật</span></span></li>
</ul>
<h2 style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/image (11).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 660px; height: 371px;" /></h2>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Những lỗi đo cạnh thường gặp và cách xử lý</span></span></h2>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Nguyên lý đo cạnh của máy toàn đạc</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc xác định khoảng cách bằng cách:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát tín hiệu laser hoặc hồng ngoại đến gương (prism)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận tín hiệu phản xạ quay về</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán khoảng cách dựa trên thời gian truyền (Time of Flight) hoặc độ lệch pha (Phase Measurement).</span></span></li>
</ul>
</li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các hãng như Leica, Topcon, Nikon hay Trimble đều sử dụng nguyên lý này, chỉ khác nhau về công nghệ xử lý tín hiệu và thuật toán nội bộ.</span></span>
<h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Các nguyên nhân gây lỗi đo cạnh</span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.1 Suy giảm hệ đo EDM<br />
<br />
Đây là nguyên nhân phổ biến nhất trong thực tế. Biểu hiện:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo lặp lại cho kết quả khác nhau</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách “nhảy số”, không ổn định</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Linh kiện EDM xuống cấp theo thời gian</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát yếu hoặc bộ thu tín hiệu kém</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Làm việc trong điều kiện ánh sáng mạnh hoặc phản xạ kém</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo tài liệu của Leica Geosystems, độ chính xác đo cạnh phụ thuộc lớn vào cường độ tín hiệu phản xạ và điều kiện môi trường.<br />
<br />
3.2.2 Lệch trục EDM – trục ngắm (Collimation error)<br />
<br />
Biểu hiện:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo gần tương đối đúng</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo xa sai lệch tăng dần</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bị va đập, rung lắc trong quá trình sử dụng</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lâu không hiệu chuẩn</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai lệch cơ khí tích lũy</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số này ảnh hưởng rõ rệt khi đo khoảng cách lớn, đặc biệt trong các công trình yêu cầu độ chính xác cao.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lỗi đo cạnh ( trục) 2.png" style="width: 680px; height: 295px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.3 Sai hằng số gương (Prism constant)<br />
<br />
Biểu hiện:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số gần như cố định trên mọi khoảng cách</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng sai loại gương</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai giá trị hằng số gương (0, -30, +17.5 mm…)</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Trimble, việc thiết lập đúng prism constant là điều kiện bắt buộc để đảm bảo độ chính xác đo cạnh.<br />
<br />
3.2.4 Ảnh hưởng môi trường đo<br />
<br />
Các yếu tố môi trường có thể ảnh hưởng đáng kể đến kết quả đo:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiệt độ và áp suất (P/T)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiễu khí quyển</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bề mặt phản xạ kém (tường sơn tối, bề mặt ướt, kim loại)</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo khuyến nghị của FIG, sai số EDM tăng lên đáng kể trong điều kiện khí quyển không ổn định.<br />
<br />
3.2.5 Sai số do thao tác người dùng<br />
<br />
Đây là nhóm lỗi rất phổ biến ngoài công trường.Bao gồm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựng sào không thẳng</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai chiều cao gương</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập sai trạm máy hoặc điểm định hướng</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình hệ tọa độ không phù hợp</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số do người dùng thường khó nhận biết nếu không có quy trình kiểm tra chéo.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Cách khắc phục</span></span></h3>
<br />
<ul>
<li data-end="2098" data-section-id="zvrhg8" data-start="2066">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra EDM, 2C, MO định kỳ</span></span></li>
<li data-end="2130" data-section-id="uu2tiv" data-start="2099">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng đúng prism constant</span></span></li>
<li data-end="2172" data-section-id="nwvnt0" data-start="2131">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm tra cạnh chuẩn trước thi công</span></span></li>
<li data-end="2209" data-section-id="ux2ibp" data-start="2173">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh đo trong điều kiện bất lợi</span></span></li>
</ul>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Các dòng máy toàn đạc phổ biến</span></span></h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Leica</strong><br />
<br />
Leica là thương hiệu cao cấp trong lĩnh vực trắc địa, nổi bật với độ chính xác và độ ổn định lâu dài. Hệ EDM mạnh, khả năng làm việc tốt trong nhiều điều kiện môi trường khác nhau, đặc biệt phù hợp với các công trình yêu cầu kỹ thuật cao.<br />
<br />
Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao, ổn định theo thời gian</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ EDM mạnh, ít bị ảnh hưởng bởi môi trường</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm và thuật toán xử lý tốt</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình cao tầng, cầu đường, quan trắc, dự án yêu cầu kiểm soát sai số chặt chẽ.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Leica toàn đạc.jpg" style="width: 680px; height: 907px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Topcon</strong><br />
<br />
Topcon là dòng máy phổ biến nhờ sự cân bằng giữa hiệu năng và chi phí. Thiết bị dễ sử dụng, độ bền tốt, đáp ứng đa dạng nhu cầu thi công ngoài công trường.<br />
<br />
Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, thao tác nhanh</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ ổn định tốt trong điều kiện công trường</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chi phí hợp lý</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, hạ tầng, thi công phổ thông.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z6599539340575_12c3eac505cba39e86905990604ee094.jpg" style="width: 680px; height: 907px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nikon</strong><br />
<br />
Nikon là lựa chọn phù hợp cho các đơn vị cần thiết bị đo đạc cơ bản với chi phí đầu tư thấp. Thiết kế đơn giản, dễ tiếp cận và đáp ứng tốt các công việc đo đạc thông thường.<br />
<br />
Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giá tốt, dễ tiếp cận</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, phù hợp người mới</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền ổn định</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, khảo sát cơ bản.<br />
</span></span>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/DTM 352 Nikon 2.jpg" style="width: 680px; height: 509px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Sokkia</strong><br />
<br />
Sokkia có cùng hệ sinh thái với Topcon, nổi bật về độ bền và khả năng làm việc ổn định trong điều kiện công trường khắc nghiệt. Thiết bị được đánh giá cao về tính “lành”, ít lỗi vặt.<br />
<br />
Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền cao, ổn định lâu dài</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động tốt trong môi trường khắc nghiệt</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác đáp ứng tốt thi công</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình hạ tầng, công trường làm việc cường độ cao.<br />
<br />
<strong>Trimble</strong><br />
<br />
Trimble tập trung mạnh vào giải pháp tích hợp và hệ sinh thái phần mềm. Các dòng máy toàn đạc của Trimble nổi bật ở khả năng kết nối, xử lý dữ liệu và làm việc đồng bộ với GNSS.<br />
<br />
Ưu điểm:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ sinh thái phần mềm mạnh (Access, TBC…)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tích hợp GNSS và quản lý dữ liệu tốt</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp quy trình làm việc hiện đại</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Dự án lớn, doanh nghiệp cần đồng bộ dữ liệu và quản lý thi công<br />
<br />
> Mỗi thương hiệu đều có định hướng và thế mạnh riêng. Việc lựa chọn nên dựa trên nhu cầu thực tế, điều kiện công trường và yêu cầu kỹ thuật của từng dự án để đạt hiệu quả tối ưu.</span></span><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
</span></span>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cách chọn máy toàn đạc phù hợp công trình</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc lựa chọn máy toàn đạc cần dựa vào yêu cầu kỹ thuật và điều kiện thi công thực tế, thay vì chỉ nhìn vào thương hiệu hoặc giá thành.</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình dân dụng, hạ tầng cơ bản</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với các dòng Nikon hoặc Topcon nhờ dễ sử dụng, độ ổn định tốt và chi phí hợp lý. Đáp ứng hiệu quả cho các công việc đo đạc, bố trí thông thường.<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu độ chính xác cao</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên ưu tiên Leica hoặc các dòng cao cấp, với độ chính xác và độ ổn định cao, phù hợp cho nhà cao tầng, kết cấu thép hoặc các hạng mục cần kiểm soát sai số chặt chẽ.<br />
</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quan trắc, kiểm soát biến dạng</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lựa chọn máy có độ chính xác cao và hệ EDM ổn định, đảm bảo khả năng lặp lại kết quả trong nhiều chu kỳ đo.<br />
<br />
Nguyên tắc quan trọng: Lựa chọn đúng thiết bị theo nhu cầu thực tế sẽ giúp:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm sai số trong đo đạc</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tối ưu chi phí đầu tư</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nâng cao hiệu quả thi công</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo chất lượng công trình</span></span></li>
</ul>
<h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Tại sao nên mua máy toàn đạc tại Trắc địa Thành Đạt?</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi cung cấp đa dạng các loại máy toàn đạc của các hãng <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu">Leica</a>, Nikon, Topcon, đáp ứng nhiều nhu cầu khác nhau trong thi công và khảo sát.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tư vấn đúng nhu cầu công trình</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ kỹ thuật ngoài công trường</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn sử dụng, kiểm tra sai số</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cung cấp thiết bị chính hãng.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
Bạn đang phân vân giữa các dòng máy toàn đạc? Hoặc gặp lỗi đo cạnh ngoài công trường?<br />
<br />
>>> Liên hệ ngay <a href="https://zalo.me/0913051734"><strong>Trắc Địa Thành Đạt</strong></a> để được tư vấn phù hợp nhất! </span></span>',
'images' => '20260505102744e930c0e340a0ba993987b0238086413c.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy toàn đạc điện tử: Báo giá, tư vấn chọn máy chuẩn công trình!',
'meta_key' => '',
'meta_des' => 'Tìm hiểu máy toàn đạc điện tử, cách chọn máy phù hợp công trình. Tư vấn thiết bị chính hãng tại Trắc Địa Thành Đạt!',
'created' => '2026-04-20',
'modified' => '2026-07-11',
'status' => '1',
'view' => '6424',
'slug' => 'may-toan-dac-dien-tu-do-chuan-bo-tri-nhanh-on-dinh-ngoai-cong-truong',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '539',
'rght' => '540',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
)
)
$tinlq = array(
(int) 0 => array(
'Post' => array(
'id' => '644',
'name' => 'GNSS RTK',
'code' => null,
'alias' => 'gnss-rtk',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; border: 0px; background-image: initial; background-position: 0px 0px; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; outline: 0px; vertical-align: top; color: rgb(0, 0, 0); font-size: 14px; text-align: justify; font-weight: 700 !important;">GNSS RTK</span><span style="color: rgb(0, 0, 0); font-size: 14px; text-align: justify;"> được biết đến là thiết bị dùng trong công tác trắc địa giúp hỗ trợ quá trình khảo sát địa hình. Với khả năng tự động vẽ và lưu lại các khu vực khảo sát giúp nhanh chóng hoàn thiện các bản vẽ đầy đủ, chính xác với các thông số kỹ thuật cần thiết. Đây là thiết bị hỗ trợ đắc lực cho những người làm công tác trắc địa để có thể hoàn thành công việc nhanh chóng, tiết kiệm thời gian và chi phí với độ chính xác cao.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường hiện nay có rất nhiều dòng máy GNSS RTK với sự đa dạng về kiểu dáng thiết kế, các tính năng cũng như kích thước cho khách hàng lựa chọn. Với mỗi sản phẩm sẽ có những đặc tính cũng như công năng riêng phù hợp với nhu cầu sử dụng của từng đối tượng khách hàng cũng như tính chất công việc. Cùng tìm hiểu ưu và nhược điểm của máy GNSS RTK để có cái nhìn tổng quan về nó trước khi bạn lựa chọn đầu tư cho dự án của mình.</span></span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <strong>Ưu điểm nổi bật của máy GNSS RTK </strong><br />
<br />
Đảm bảo độ chính xác cao nhất trong quá trình làm việc. Đối với công tác trắc địa thì độ chính xác là thông số quan trọng nhất cần hướng tới trong quá trình làm việc do đó các thiết bị hỗ trợ cũng cần tối ưu hóa được yếu tố này. Với việc áp dụng công nghệ RTK cũng như CORS Network các mẫu máy này đảm bảo mang đến các thông số chuẩn nhất để cung cấp dữ liệu cho quá trình vẽ cũng như hình thành các dữ liệu chung.<br />
<br />
Trong việc sử dụng công nghệ GNSS thì CORS là trạm tham chiếu hoạt động liên tục để tạo sự liên kết các thiết bị với đường truyền tín hiệu. Công nghệ này giúp khoảng cách tối đa giữa trạm gốc và máy định vị GNSS được thiết lập khoảng 10 - 15km, giúp tăng khoảng cách cho hoạt động của máy. Điều này giúp giảm nhân công cũng như chi phí trong quá trình làm việc.<br />
<br />
Với thiết kế nhỏ gọn, dễ dàng di chuyển giúp mang đến sự tiện lợi tối đa trong quá trình sử dụng. <br />
<br />
Một ưu điểm phải kế đến của loại máy GNSS RTK đó là việc tích hợp nhiều tính năng thông minh trong cùng thiết bị. Các tính năng điều khiển bằng giọng nói, bảng điều khiển điện tử, việc thay đổi kích thước máy được tích hợp …giúp dễ dàng sử dụng cũng như có thể thực hiện được nhiều chức năng khác nhau cùng lúc.<br />
<br />
Bộ nhớ trong lớn giúp tăng khả năng lưu trữ thông tin cùng với đó là khả năng kết nối với máy tính, điện thoại, bluetooth hay 3G, 4G giúp nâng cao tối đa được các công năng cũng như sự tiện lợi trong quá trình sử dụng.<br />
<br />
Khả năng kết nối với các thiết bị khác tối ưu cùng với hệ thống CORS.<br />
<br />
Với chất liệu cao cấp có khả năng chống va đập cũng như hạn chế tối đa các tác động của các yếu tố bên ngoài giúp mang đến sản phẩm bền đẹp lâu dài theo thời gian sử dụng.<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/phân phối máy định vị vệ tinh 2 tần số rtk (1).png" style="width: 850px; height: 604px;" /><br />
<br />
<strong>Nhược điểm của máy GNSS RTK</strong><br />
<br />
Hiện nay, máy GPS –GNSS RTK chất lượng dù đã được tích hợp đầy đủ các tính năng nhưng để có được độ chính xác tuyệt đối cùng với vi</span>ệc</span> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">thực hiện thêm nhiều công việc khác các bạn cần phải có sự kết nối thêm các thiết bị khác để sử dụng.<br />
<br />
Giới hạn làm việc của máy trong một phạm vi nhất định cũng là một khó khăn trong quá trình sử dụng. Do đó, cần tìm hiểu đầy đủ các thông số của máy trước khi lựa chọn để phù hợp với đặc điểm công việc.<br />
<br />
Giá thành cao cũng là một nhược điểm cần tính đến khi quyết định đầu tư. <br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/Máy RTK.png" style="width: 850px; height: 680px;" /><br />
<br />
</span></span>',
'images' => '2021081816133230412c34d3b16d2ec66a3d1eba4d0d89.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy RTK',
'meta_key' => 'Máy RTK, máy định vị vệ tinh RTK, máy GPS RTK, máy định vị vệ tinh GNSS RTK, máy RTK giá rẻ, máy RTK tốt nhất',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-08-18',
'modified' => '2026-07-12',
'status' => '1',
'view' => '20547',
'slug' => 'gnss-rtk',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '231',
'rght' => '232',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 1 => array(
'Post' => array(
'id' => '641',
'name' => 'Phần mềm LandStar 7 và cách cài đặt trên máy tính',
'code' => null,
'alias' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LandStar 7 là một ứng dụng miễn phí được phát triển bởi www.chcnav.com, thuộc danh mục Bản đồ và dẫn đường. </span></span>',
'content' => '<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="294" src="https://www.youtube.com/embed/04hr6Gy-3RE" title="YouTube video player" width="680"></iframe><br />
<br />
LandStar7 là giải pháp phần mềm khảo sát đã được kiểm chứng thực địa mới nhất dành cho mọi thiết bị Android và bộ điều khiển dữ liệu CHCNAV. Được thiết kế cho các nhiệm vụ khảo sát và lập bản đồ có độ chính xác cao, LandStar7 cung cấp khả năng quản lý quy trình làm việc liền mạch, giao diện người dùng đồ họa dễ học và dễ sử dụng để hoàn thành tất cả các dự án của bạn một cách hiệu quả. Các định dạng nhập và xuất dữ liệu toàn diện, nhiều phương pháp đo lường đảm bảo năng suất tức thì.<br />
<br />
- Hỗ trợ nhiều loại định dạng nhập và xuất khác nhau LandStar7 nhập và xuất DXF, DWG, SHP, KML, KMZ, CSV, DAT, TXT cũng như nội dung dữ liệu được tùy chỉnh đầy đủ từ dự án khảo sát lựa chọn các định dạng CSV, DAT và TXT.<br />
<br />
- Xác định vị trí và trực quan hóa dữ liệu dự án của bạn trong nháy mắt LandStar7 tích hợp bản đồ trực tuyến của Google, OSM, BING và WMS để cung cấp thông tin vị trí có ý nghĩa cho các nhà khảo sát và chuyên gia xây dựng. Các dự án được hiển thị trong địa hình khu vực hoặc hình ảnh vệ tinh trong thời gian thực.<br />
<br />
- Rất linh hoạt và sẵn sàng cho nhiều ứng dụng LandStar7 được thiết kế để cung cấp cho bạn các bộ tính năng đặc biệt, từ khảo sát đất đai, các dự án xây dựng và kỹ thuật, lập bản đồ, thu thập dữ liệu GIS, liên quan đến đường đến khảo sát đường ống.<br />
<br />
Giao diện người dùng có thể tùy chỉnh của nó giúp LandStar7 dễ sử dụng bằng cách tập trung vào các chức năng thiết yếu thường được sử dụng. Quy trình phát triển phần mềm linh hoạt Nhóm phát triển LandStar7 của chúng tôi giữ liên lạc thường xuyên với các nhà khảo sát, các chuyên gia xây dựng và mạng lưới đối tác trên toàn thế giới của chúng tôi để mang lại các chức năng vượt trội mới. Khi sử dụng LandStar7 ngay hôm nay, bạn được đảm bảo tận hưởng các tính năng mới thường xuyên mà không phải trả thêm phí.<br />
<br />
<strong>>>></strong> Trong bài viết bên dưới đây chúng tôi sẽ giới thiệu tới bạn cách cài đặt LandStar 7 trên máy tính (PC Windows & Mac). Phương pháp mà chúng tôi áp dụng là sử dụng Bluestacks, công cụ giả lập hệ điều hành Android hàng đầu hiện nay. Tất cả những gì bạn cần chỉ là một chiếc máy tính chạy Windows hoặc Mac.<br />
<br />
<strong>Bước 1:</strong> Tải xuống và cài đặt Bluestacks<br />
Tải phiên bản mới nhất tại đây <a href="https://www.bluestacks.com/vi/index.html" target="_blank">https://www.bluestacks.com/vi/index.html</a>. Trang web này hỗ trợ tiếng Việt nên bạn có thể dễ dàng tải về file cài đặt của Bluestacks. Quá trình tải về có thể mất vài phút.<br />
Sau khi tải về, nhấp chuột vào file bạn mới tải xuống để bắt đầu quá trình cài đặt. Giao diện cài đặt rất đơn giản, quá trình cặt đặt sẽ diễn ra nhanh chóng. Nếu có bất cứ vấn đề gì bạn có thể vào mục hỏi đáp của Bluestacks để tham khảo cách xử lý.<br />
<br />
<strong>Bước 2:</strong> Tải xuống file cài đặt của LandStar 7 cho máy tính PC Windows<br />
File cài đặt này có đuôi là .APK. APK là viết tắt của cụm từ tiếng Anh "Android application package" (tạm dịch là bộ cài đặt ứng dụng cho hệ điều hành Android). Bạn có thể tải về file apk này từ trang web của chúng tôi <a href="https://drive.google.com/file/d/1vSHDZvVz9EjJtpVAeKgVzJaua3D-Wwf1/view?usp=sharing">TẠI ĐÂY</a>.<br />
<br />
<strong>Bước 3:</strong> Tiến hành cài đặt LandStar 7 bằng Bluestacks<br />
Tập tin APK của LandStar 7 sau khi tải về có thể được cài đặt vào Bluestacks theo một trong các cách sau:</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhấp đúp vào file APK, cách này đơn giản và nhanh nhất.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuột phải vào file APK, chọn "Open With", sau đó chọn Bluestacks.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kéo thả file APK vào màn hình ứng dụng Bluestacks</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quá trình cài đặt LandStar 7 sẽ diễn ra nhanh chóng. Ngay sau khi quá trình cài đặt kết thúc, bạn sẽ thấy biểu tượng icon của LandStar 7 trên màn hình trang chủ của Bluestacks. Nhấp chuột vào biểu tượng icon này để bắt đầu sử dụng LandStar 7 trên máy tính PC Windows.</span></span><br />
<br />
<img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p>
',
'images' => '2021080616092739e989a091af097f2762083a8ccfb10e.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy RTK',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-08-06',
'modified' => '2026-07-12',
'status' => '1',
'view' => '23109',
'slug' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '225',
'rght' => '226',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 2 => array(
'Post' => array(
'id' => '640',
'name' => 'iRTK4 Hi-Target - A Simple but not Simplistic GNSS System',
'code' => null,
'alias' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">iRTK4 Hi-Target là hệ thống thu GNSS thông minh đầy đủ tính năng được trang bị anten mới tích hợp đa kênh tiên tiến cho phép người dùng giải được các bài toán đo đạc một cách chính xác, đáng tin cậy. Tính năng Tilt-Surveying không cần hiệu chuẩn mà vẫn có thể thu thập dữ liệu ở nhiều nơi.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. RTK tiên tiến thế hệ mới<br />
<br />
Quản lý tín hiệu vệ tinh linh hoạt giúp bạn có được giải pháp chính xác hơn. Hiệu suất được cải thiện 20% trong môi trường GNSS đầy thử thách.<br />
<br />
2.IMU (Biểu tượng)<br />
<br />
Bắt đầu ngay lập tức với công nghệ bù nghiêng không cần hiệu chuẩn, hỗ trợ bạn khảo sát nhanh chóng và chính xác hoặc xác định các điểm mà không cần cân bằng cột, Sai số dưới 3cm trong phạm vi nghiêng 45 °, tăng hiệu suất làm việc lên 20%.<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/iRTK4(1).jpg" style="width: 383px; height: 131px;" /><br />
<br />
3. Sạc nhanh<br />
<br />
Sạc pin của bạn lên đến 50 phần trăm chỉ trong 50 phút với bộ chuyển đổi 45W, nhờ khả năng sạc nhanh, bạn có thể sạc lại trong thời gian ngắn hơn.<br />
<br />
4. Giao diện người dùng web (WEB UI)<br />
<br />
Cách nhanh chóng và hiệu quả để giám sát và điều khiển các thiết bị phần cứng. Ngoài ra, cung cấp quyền truy cập vào các tính năng được sử dụng phổ biến nhất thông qua trình duyệt web hiện có trên thiết bị bạn chọn — không cần tải xuống hoặc cài đặt bất kỳ thứ gì!<br />
<br />
5. Smart Base<br />
<br />
Tối ưu hóa tuyệt vời cài đặt chế độ làm việc, Tự động ghép nối Base và Rover của bạn bằng dịch vụ toàn cầu Hi-target, mở rộng phạm vi công việc và tiết kiệm thời gian của bạn.<br />
<br />
Radio ngoài thế hệ mới<br />
<br />
HDL-460A cung cấp thông tin liên lạc dữ liệu đáng tin cậy cho các ứng dụng quan trọng trong đó yêu cầu sự kết hợp của sự ổn định, hiệu suất cao và phạm vi xa.<br />
<br />
<img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br />
</span></span>',
'images' => '20210805113424adf751172d9f3d7ddcf7e526d09e3fb6.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy RTK',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-08-05',
'modified' => '2026-07-12',
'status' => '1',
'view' => '23795',
'slug' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '223',
'rght' => '224',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 3 => array(
'Post' => array(
'id' => '639',
'name' => 'Thông số kỹ thuật của một số dòng máy toàn đạc điện tử Leica (cũ): TCR-403, TCR-405, TCR-407, TCR-705, TCR-802, TCR-805',
'code' => null,
'alias' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><font color="#323232">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ: </font><span style="line-height: 107%; letter-spacing: 0.1pt;">Leica TCR-802 Power, Leica TCR-805, Leica TC-705.</span></span></span>
<h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;">
</h1>
<h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;">
<span style="font-size: 17pt; line-height: 107%; font-family: Helvetica, sans-serif; letter-spacing: 0.1pt;"><o:p></o:p></span></h1>
',
'content' => '<p>
<font color="#323232" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ:<br />
<br />
- </font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; line-height: 14.98px; letter-spacing: 0.1pt;">Leica TCR-802 Power<br />
- Leica TCR-805<br />
- Leica TC-705</span><br />
- <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica TCR 403, 405,407 Power</span></span><br />
</p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">I. Máy toàn đạc điện tử Leica TCR-802 Power</span></span></h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
1. Ống kính<br />
- Có độ phóng đại là: 30 x<br />
- Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br />
- Phạm vi điều tiêu là: 1.7m cho tới vô cực<br />
- Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br />
2. Bộ nhớ và truyền dữ liệu<br />
- Bộ nhớ trong của máy là: 24.000 điểm ghi<br />
- Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br />
3. Bàn phím và màn hình<br />
- Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br />
- Trang bị bàn phím tiêu chuẩn Alpha<br />
4. Đo góc ( Hz, V)<br />
- Có độ chính xác (ISO 171233) là: 2”<br />
- Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br />
- Phương pháp: liên tục, đối tâm, tuyệt đối<br />
- Bộ bù: tăng lên 4 lần sự bù trục<br />
- Độ chính xác cài đặt độ bù là: 2”<br />
5. Đo khoảng cách cho đến điểm phản xạ<br />
- Với gương GPR1: 3500m<br />
- Với tấm phản xạ (60 mm x 60 mm): 250m<br />
- Độ chính xác / Thời gian đo:<br />
+ Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br />
+ Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br />
+ Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br />
6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br />
7. Dọi tâm tia laser<br />
- Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br />
- Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br />
8. Nguồn pin (GEB221)<br />
- Thể loại: LithiumIon<br />
- Thời gian máy hoạt động: hơn 20 giờ<br />
- Máy có trọng lượngg: 5.1 kg<br />
9. Môi trường hoạt động:<br />
- Làm việc tốt: từ -20°C cho đến +50°C<br />
- Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br />
- Độ ẩm là: 95% không ngưng tụ</span></span><br />
<h1 style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/154253643_1379364745733010_5284105879190099443_o (1)(1).jpg" style="width: 480px; height: 360px;" /></span></span></h1>
<h1>
</h1>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Máy toàn đạc điện tử Leica TCR-805</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Ống kính<br />
- Có độ phóng đại là: 30 x<br />
- Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br />
- Phạm vi điều tiêu là: 1.7m cho tới vô cực<br />
- Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br />
2. Bộ nhớ và truyền dữ liệu<br />
- Bộ nhớ trong của máy là: 24.000 điểm ghi<br />
- Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br />
3. Bàn phím và màn hình<br />
- Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br />
- Trang bị bàn phím tiêu chuẩn Alpha<br />
4. Đo góc ( Hz, V)<br />
- Có độ chính xác (ISO 171233) là: 5”<br />
- Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br />
- Phương pháp: liên tục, đối tâm, tuyệt đối<br />
- Bộ bù: tăng lên 4 lần sự bù trục<br />
- Độ chính xác cài đặt độ bù là: 2”<br />
5. Đo khoảng cách cho đến điểm phản xạ<br />
- Với gương GPR1: 3500m<br />
- Với tấm phản xạ (60 mm x 60 mm): 250m<br />
- Độ chính xác / Thời gian đo:<br />
+ Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br />
+ Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br />
+ Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br />
6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br />
7. Dọi tâm tia laser<br />
- Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br />
- Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br />
8. Nguồn pin (GEB221)<br />
- Thể loại: LithiumIon<br />
- Thời gian máy hoạt động: hơn 20 giờ<br />
- Máy có trọng lượngg: 5.1 kg<br />
9. Môi trường hoạt động:<br />
- Làm việc tốt: từ -20°C cho đến +50°C<br />
- Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br />
- Độ ẩm là: 95% không ngưng tụ</span></span><br />
<h1 style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/abaec5a286b071ee28a19.jpg" style="width: 480px; height: 640px;" /></span></span></h1>
<h1>
</h1>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">III. Máy toàn đạc điện tử Leica TC-705</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Đo góc<br />
- Có độ chính xác là: ±5”<br />
- Cách đo: liên tục, đối tâm và tuyệt đối.<br />
2. Hệ thống bù trục<br />
- 4 trục bù nghiêng<br />
- Dải bù nghiêng là : 4’<br />
- Có độ chính xác bù trục là: ±0.5”<br />
3. Đo cạnh có gương<br />
- Khi đo bằng gương GPR1 là: 1.000m<br />
- Khi đo bằng gương GRZ4 là: 600m<br />
- Khi đo bằng gương mini GMP 101 là: 400m<br />
- Đối với gương giấy 60 x 60mm là: 250m<br />
- Có độ chính xác là: ±1mm + 1.5 ppm / 2.4 giây<br />
- Khi đo nhanh là: ±3 mm+1.5 ppm / 0.8s<br />
- Hiển thị là: 0.1 mm<br />
- Cách thức: Đổi pha với tia laze đỏ đồng trục, rõ rệt.<br />
4. Đo cạnh không gương<br />
- PinPoint R200 là : 200m<br />
- Có độ chính xác là: ±2mm + 2 ppm / 3 giây<br />
5. Ống kính<br />
- Có độ phóng đại ống kính là: 30 X<br />
- Độ mở ống kính là : 40mm<br />
- Dải điều quang: từ 1.7 m cho tới vô cùng<br />
6. Dọi tâm<br />
- Kiểu dọi tâm: bằng tia laze<br />
- Có độ chính xác là: ±1mm tại 1.5 chiều cao máy<br />
7. Màn hình, bàn phím<br />
- Được trang bị 01 Màn hình LCD rõ nét<br />
- Bàn phím gồm có chữ và số. Có chiếu sáng cho màn hình<br />
8. Quản lý dữ liệu<br />
- Có bộ nhớ trong là: 10.000 điểm nhập cùng với điểm đo được<br />
- Truyền dữ liệu: GSI-Format via RS232<br />
- Trao đổi dữ liệu: GS116 / IDEX / GS18 / dxf<br />
9. Pin của máy<br />
- Sử dụng Pin Lithium-Ion GEB 121,<br />
- Thời gian vận hành: từ 5 đến 8 tiếng<br />
10. Trọng lượng<br />
- Đầu máy nặng: 5,6 kg<br />
11. Khả năng chống nước và chống bụi<br />
- Đã đạt được tiêu chuẩn IP54<br />
- Có khả năng chịu độ ẩm lên đến 95%</span></span><br />
<br />
<h2>
<span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IV. Máy toàn đạc điện tử Leica TCR-403; TCR-405; TCR-407</span></span></h2>
<br />
<span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Dòng sản phẩm LEICA Total Station TPS400 Power (TCR403/405/407 Power) nổi bật với chế độ đo không gương (bằng tia laser) và laser chỉ hướng.</span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" />
<span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Thừa hưởng đầy đủ các tính năng của TPS400, TPS400 Power còn được tích hợp thêm khả năng đo xa bằng tia laser không cần gương, chỉ cần ngắm vào vật có độ phản xạ đủ cao (90%). Điều này đã giúp cho TPS400 Power năng động và tiện lợi hơn.</span><br />
<br />
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">1. Ống kính:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ phóng đại: 30 x<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Trường nhìn : 1° 30’(1.66 gon) 26m tại khoảng cách 1km<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Phạm vi điều tiêu: 1.7 m đến vô cùng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Thể lưới: chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
2. Bộ nhớ, truyền dữ liệu:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Bộ nhớ trong: 24.000 điểm ghi<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Định dạng dữ liệu: GSI / DXF / XML / ASCII/XLS/ Định dạng tự do<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
3. Bàn phím và màn hình<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Màn hình: 01 màn hình tinh thể lỏng LCD <a href="http://tracdiathanhdat.vn/gioi-thieu-cong-ty-cp-cn-va-tm-thanh-dat.htm" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;">160×280</a> pixel, đèn chiếu sang 5 cấp<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Bàn phím tiêu chuẩn Alpha<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
4. Đo góc ( Hz, V)<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ chính xác (ISO 171233): 5”<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Hiển thị: 1” / 0.1 mgon / 0.01 mil<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Phương pháp: tuyệt đối, liên tục, đối tâm<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Bộ bù: tăng lên bốn lần sự bù trục<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ chính xác thiết đặt độ bù: 2”</span></span></p>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">5. Đo khoảng cách tới điểm phản xạ:</span></span></p>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Đo không gương (đo Laser RL): 170 m </span></span></p>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Gương GPR1: 3500m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Tấm phản xạ (60mmx60mm): 250m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ chính xác/ Thời gian đo:<br style="margin: 0px; padding: 0px;" />
+ Đo chính xác (Fine) : ±(5 mm+2 ppmD)/ 2.4 giây,<br style="margin: 0px; padding: 0px;" />
+ Đo nhanh: ±(5mm+2ppmD)/0.8 giây,<br style="margin: 0px; padding: 0px;" />
+ Đo đuổi: ±(5mm+2ppmD)/< 0.15 s<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
6. Hệ điều hành: Windows CE: 5.0 Core<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
7. Dọi tâm laser:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Loại : Điểm laser,chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ chính xác dọi tâm:1.5mm trên 1.5m chiều cao máy<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
8. Nguồn pin (GEB221):<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Loại: LithiumIon<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Thời gian làm việc: hơn 20 h<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Trọng lượng: 5.1 kg<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
9. Môi trường hoạt động:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Biên độ làm việc: từ -20°C tới +50°C<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Chịu nước và bụi (IEC 60529): IP55<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" />
– Độ ẩm: 95% không ngưng tụ</span></span><br />
</p>
<table border="1" cellpadding="0" cellspacing="0" style="width:619px;" width="619">
<tbody>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu kỹ thuật </strong></span></span></td>
<td style="width:102px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>403</strong></span></span></td>
<td style="width:132px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>405</strong></span></span></td>
<td style="width:120px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>407</strong></span></span></td>
</tr>
<tr>
<td colspan="3" style="width:499px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Độ góc (Hz, V)</strong></span></span></td>
<td style="width:120px;">
</td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương thức</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo liện tục tuyệt đối</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gốc hiển thị (bước nhảy)</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″ / 0.1 mgon / 0.01 mil</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br />
(ISO 17123 -3)</span></span></td>
<td style="width:102px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3″ (1 mgon)</span></span></td>
<td style="width:132px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5″ (1.5 mgon)</span></span></td>
<td style="width:120px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7″ (2 mgon)</span></span></td>
</tr>
<tr>
<td colspan="4" style="width:619px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Ống kính</strong></span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ số phóng đại</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">30x</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trưng nhìn</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1° 30′ (26 m at 1 km)</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khỏang cách nhìn gần I</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7m</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưới chữ thập</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiếu sáng</span></span></td>
</tr>
<tr>
<td colspan="4" style="width:619px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Bù nghiêng</strong></span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống bù nghiêng</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng 2 trục</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Setting accuracy</span></span></td>
<td style="width:102px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″</span></span></td>
<td style="width:132px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5″</span></span></td>
<td style="width:120px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2″</span></span></td>
</tr>
<tr>
<td colspan="4" style="width:619px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Đo khoảng cách bằng tia hồng ngoại</strong></span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring range with circular prism GPR1</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.500 m</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring with reflective foil<br />
(60 mm x 60 mm)</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">250m</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br />
(ISO 17123 -4)<br />
(fine/quick/tracking)</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2mm + 2 ppm/5 mm + 2 ppm/5 mm + 2 ppm</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">< 1 sec/< 0.5 sec/< 0.15 sec</span></span></td>
</tr>
<tr>
<td colspan="4" style="width:619px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chính xác, nhanh, do liên tục.</strong></span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo khoảng cách không gương</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R100 (“power”) 170m (90 % reflective)</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(Medium atmospheric conditions)</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R300 (“ultra”) > 500 m (90 % reflective)<br />
Laser at GPR circular reflector 7’500 m</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3mm+2 ppm/5 mm+2 ppm</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">typ. 3 s/1 s</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kíck cỡ điểm với 100 m</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">12mm x 40 mm</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu</strong></span></span></td>
<td colspan="3" style="width:354px;">
</td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ trong</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 Điểm đo</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao tiếp</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RS232</span></span></td>
</tr>
<tr>
<td style="width:265px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng dữ liệu</span></span></td>
<td colspan="3" style="width:354px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GSI/ASCII/dxf/Freely definable formats</span></span></td>
</tr>
</tbody>
</table>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"> </span></span></span></span></p>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="width: 250px; height: 100px;" /></span></span></p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>',
'images' => '202107301638040599a20d3fb57fe46b312b506c17e5cc.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy toàn đạc điện tử ',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-30',
'modified' => '2026-07-12',
'status' => '1',
'view' => '19533',
'slug' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '221',
'rght' => '222',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 4 => array(
'Post' => array(
'id' => '638',
'name' => 'Những lỗi thường gặp ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m',
'code' => null,
'alias' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span>',
'content' => '<br />
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tham khảo một số lỗi và ý nghĩa của những lỗi này ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m</span></span><br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/1565334829-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-dathop-02.jpg" style="width: 620px; height: 477px;" /><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp các lỗi trên hãy liên hệ với chúng tôi qua số hotline để được khắc phục nhé!<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/hotline(1).png" style="width: 250px; height: 100px;" /></span></span><br />
',
'images' => '2021072917090604e0ee7f57cb99fce8677b2f946c35af.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy thuỷ bình điện tử',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-29',
'modified' => '2026-07-12',
'status' => '1',
'view' => '14983',
'slug' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '219',
'rght' => '220',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 5 => array(
'Post' => array(
'id' => '637',
'name' => 'So sánh giữa Garmin GPSMAP 66S vs GPSMAP 64S',
'code' => null,
'alias' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tham khảo sự khác nhau giữa hai dòng máy định vị GPSMAP 66s và 64s của hãng Garmin và những ưu điểm vượt trội mà Garmin đã mang tới cho dòng máy GPSMAP 66s nhé.</span></span>',
'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>GPSMAP 66s</strong>: Thiết bị cầm tay đa vệ tinh tích hợp cảm biến.</span></span><br />
<br />
<strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">GPSMAP 64s</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">: </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);">Độ nhạy máy thu cao, thiết bị có thể cùng lúc nhận được tín hiệu vệ tinh từ hai hệ thống GPS và GLONASS. GPSMAP 64s</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);"> kèm theo khí áp kế để đo cao độ, la bàn điện tử, kết nối USB tốc độ cao, hỗ trợ khe cắm thẻ nhớ, đồng thời có khả chia sẽ dữ liệu bằng Wireless với các thiết bị Garmin tương thích khác.</span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/So sánh GPS 66 và 64.jpg" style="width: 690px; height: 459px;" /><br />
<br />
<br />
<u><strong>>>> Cùng so sánh thông số kỹ thuật của hai dòng máy GPSMAP 66s và 64s:</strong></u></span></span><br />
<br />
<br />
<table border="1" cellpadding="0" cellspacing="0">
<tbody>
<tr>
<td style="width:161px;">
</td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 66s</strong></span></span><br />
</td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 64s</strong></span></span><br />
</td>
</tr>
<tr>
<td style="width:161px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước tổng thể:</span></span><br />
</td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.2 x 16.3 x 3.5cm</span></span><br />
</td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.1 x 16 x 3.6cm</span></span><br />
</td>
</tr>
<tr>
<td style="width:161px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước màn hình:</span></span><br />
</td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3 inches</span></span><br />
</td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.6 inches</span></span><br />
</td>
</tr>
<tr>
<td style="width:161px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ phân giải màn hình:</span></span><br />
</td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">240 x 400p (pixel)</span></span><br />
</td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">160 x 240p (pixel)</span></span><br />
</td>
</tr>
<tr>
<td style="width:161px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ khả năng:</span></span><br />
</td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">16GB</span></span><br />
</td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4GB</span></span><br />
</td>
</tr>
<tr>
<td style="width:161px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Waypoint/Routes/ Tracklog:</span></span></td>
<td style="width:211px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">20000 Điểm, 250 GPX Track và 300 điểm được lưu</span></span></td>
<td style="width:18px;">
</td>
<td style="width:202px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 điểm, 200 điểm được lưu</span></span></td>
</tr>
</tbody>
</table>
<br />
<ul>
<li>
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Theo dõi hoạt động thời tiết </span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tải xuống hình ảnh vệ tinh trực tiếp (không đăng ký)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chắc chắn theo tiêu chuẩn MIL-STD 810G cho hiệu suất nhiệt, sốc và nước.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhật ký Rinex</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối WiFi / Bluetooth</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Thiết kế phần cứng</strong><br />
Từ góc độ thiết kế, cả hai thiết bị đều cực kỳ giống nhau, với một vài khác biệt nhỏ về kích thước và màn hình<strong>. </strong>GPSMAP 66S có kích thước tổng thể lớn hơn một chút, nhưng sự khác biệt là gần như không thể nhận ra. Ngoài những thay đổi trực quan rõ ràng, họ cảm thấy khá giống với mẫu cũ. Những thay đổi khác là các nút nhỏ gọn hơn một chút nhưng rộng hơn. Các chức năng của nút giống nhau mặc dù phiên bản GPSMAP 66s có menu khác.<br />
<br />
Nút nguồn được đặt ở phía trên của thiết bị. Vị trí trên GPSMAP 64 có vẻ được ưu thích hơn vì bật / tắt dễ dàng nhưng bạn có thể hiểu lý do tại sao Garmin muốn thực hiện thay đổi này vì nó ít có khả năng bị hỏng khi bật thiết bị và lãng phí điện năng của bạn.<br />
<br />
Khác với những thay đổi đó và màn hình lớn hơn một chút, tất cả các cổng đều giống nhau, mặc dù Garmin đã thay đổi dây nguồn / dữ liệu thành MicroUSB. Khe cắm thẻ Micro SD có thể bên dưới pin.<br />
<br />
<strong>Tuổi thọ pin</strong><br />
Cả hai thiết bị đều hoạt động trên hai pin AA và tuổi thọ thông thường sẽ là 16 giờ mặc dù điều đó chủ yếu phụ thuộc vào chức năng ứng dụng và sử dụng GPS của bạn. GPSMAP 66 mới cũng có chức năng "<strong>Expedition"</strong> , giúp tăng đáng kể thời lượng pin của thiết bị bằng cách hạn chế các chức năng phần mềm tự động như điểm theo dõi, thời gian hiển thị và vào chế độ năng lượng thấp.<br />
<br />
<strong>Cách bật chế độ Expedition trên GPSMAP 66s</strong><br />
<br />
Chuyển đến menu chính của thiết bị> Chọn <strong>Cài đặt</strong> > Chọn "<strong>Expedition"</strong> . Sau đó, bạn sẽ được yêu cầu chọn "<em>Tự động, Nhắc hoặc Không bao giờ</em>".<br />
Chọn <em>Tự động</em> sẽ tự động đặt thiết bị sang chế độ thám hiểm sau hai phút hoạt động.<br />
Chọn <em>Nhắc </em>có nghĩa là lần sau khi bạn tắt thiết bị, nó sẽ yêu cầu bạn bật chế độ thám hiểm thay vì tắt.<br />
Chọn <em>Không bao giờ</em> sẽ tắt bất kỳ hình thức chế độ thám hiểm nào bạn đã chạy (Nhắc hoặc Tự động).<br />
<br />
<strong>Các tính năng phần mềm khả dụng trên cả hai thiết bị</strong><br />
Cả hai thiết bị đều có thể ghi lại các điểm / tuyến đường và nhật ký theo dõi, mặc dù GPSMAP 66s có thể ghi lại nhiều hơn.<br />
<br />
Một số tính năng của cả hai dòng máy:</span></span>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính diện tích trên các thiết bị (chỉ cần đi bộ chu vi của khu vực).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tải bản đồ tùy chỉnh - bạn có thể tải bản đồ tùy chỉnh tương thích với các thiết bị của Garmin (Garmin Topo hoặc thậm chí City Nav Maps). Nếu bạn tải một trong hai bản đồ này, thì bạn sẽ có quyền truy cập vào chức năng định tuyến tự động trên thiết bị. * Bạn cần sử dụng bản đồ Topo bản FULL để định tuyến.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Geocaching thân thiện - ứng dụng Geocaching được tải sẵn trên các thiết bị, mặc dù vậy bạn cần phải đăng ký thiết bị.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lịch săn / cá - được tải sẵn trên thiết bị</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin Mặt trời và Mặt trăng - được tải sẵn trên thiết bị</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng xem ảnh </span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Kết nối GARMIN</strong><br />
<br />
Garmin Connect - khả dụng trên cả hai thiết bị cho phép thông tin hoạt động được gửi đến tài khoản kết nối Garmin của bạn và cho phép các tính năng được kết nối với điện thoại thông minh của bạn. Các tính năng được kết nối bao gồm Thông báo điện thoại, LiveTrack, GroupTrack.<br />
<br />
<strong>Chức năng cảm biến</strong><br />
Cả hai thiết bị GPS cầm tay trên đều có thể đo độ cao áp kế, la bàn bù 3 trục nghiêng. Việc đo độ cao áp kế sẽ có thể cung cấp cho bạn thông tin về những thay đổi của điều kiện thời tiết (giả sử bạn vẫn ở cùng độ cao) mặc dù nó cần phải được hiệu chỉnh đầy đủ. Cảm biến này cũng có thể được sử dụng để đo lường thay đổi độ cao của bạn và thậm chí đo lường thay đổi độ dốc AVG khi nhìn vào dữ liệu điểm của bạn.<br />
<br />
<strong>>>> Các tính năng phần mềm CHỈ khả dụng trên GPSMAP 66s:</strong><br />
<br />
- Tương thích với ứng dụng khám phá của Garmin - Sau khi được kết nối với ứng dụng điện thoại thông minh của bạn, ứng dụng khám phá của Garmin sẽ tự động đồng bộ hóa và chia sẻ điểm tham chiếu, tuyến đường và tuyến đường với thiết bị của bạn. Bạn cũng có thể tải bản đồ về điện thoại thông minh của mình để truy cập ngoại tuyến.<br />
<br />
- Theo dõi hoạt động thời tiết <br />
Garmin đã tăng thông tin thời tiết của họ một cách đáng kể với lần lặp này. Bây giờ bạn có thể nhận được rất nhiều dữ liệu thời tiết dựa trên thông tin dự báo thời gian thực. Họ có các tùy chọn bản đồ dự đoán riêng biệt về nhiệt độ, gió, mưa và mây. Nó cũng cung cấp radar thời tiết trực tiếp để bạn sẵn sàng thay đổi kế hoạch nếu bạn sắp bị bắt. Tính năng này không phụ thuộc vào kết nối Bluetooth hoạt động với điện thoại thông minh của bạn có bộ phận tiếp nhận. <br />
Hình ảnh vệ tinh hoạt động chính xác giống như trên loạt GPSMAP 64s nhưng bạn không còn phải trả tiền cho nó nữa.<br />
<br />
- Điểm mới của dòng GPSMAP 66s là khả năng tương thích với cửa hàng Connect Connect của Garmin, về cơ bản là 'App Store' của Garmin. <br />
<br />
- Chức năng InReach Remote: bạn có thể điều khiển thiết bị inReach mini của mình.<br />
<br />
- Đèn pin và SOS <br />
Một tính năng độc đáo khác là <strong>đèn pin LED</strong> rất sáng và<strong> đèn hiệu SOS</strong> có thể được sử dụng để báo hiệu sự giúp đỡ. Chức năng SOS chỉ là một nét khẩn cấp. Tuy nhiên, bạn cũng có thể đặt đèn pin nhấp nháy trong khoảng 1-9 lần mỗi giây.<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp.jpg" style="width: 250px; height: 100px;" /><br />
<br />
</span></span>',
'images' => '202408021508551192007d993f13fc9de7ce32bd9bab16.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy định vị GPS cầm tay Garmin',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-28',
'modified' => '2026-07-12',
'status' => '1',
'view' => '27644',
'slug' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '217',
'rght' => '218',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 6 => array(
'Post' => array(
'id' => '636',
'name' => 'Máy thuỷ bình kỹ thuật số Leica LS10 và LS15',
'code' => null,
'alias' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span></span>',
'content' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10, LS15 có thể làm việc liên tục nhiều giờ, độ sai lệch gần như tuyệt đối không ảnh hưởng tới độ chính xác kết quả đo.<br />
<br />
Leica LS10, LS15 thường được dùng để đo chênh cao, đo khoảng cách với yêu cầu độ chính xác cao tuyệt đối. Máy có thể dẫn cao độ phục vụ cho vẽ thành lập bản đồ.</span></span><br />
<br />
<ul>
<li>
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> Tính linh hoạt </span></span></strong></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dòng máy thủy bình Leica LS10, LS15 được thiết kế để khảo sát, thực hiện san lấp mặt bằng thường xuyên trên các công trường xây dựng, kiểm tra hoặc giám sát các tòa nhà, đường sắt hoặc đường bộ. Với Leica LS10, LS15 bạn luôn có sẵn công cụ làm việc phù hợp.</span></span><br />
<br />
<ul>
<li>
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác và độ tin cậy cao nhất</span></span></strong></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bạn sẽ nhận được kết quả đáng tin cậy và chính xác ngay. Chất lượng quang học hàng đầu của Leica Geystems luôn mang lại hình ảnh có độ tương phản cao và giúp việc đọc chính xác và dễ dàng ngay cả trong điều kiện ánh sáng không thuận lợi. Do sự ổn định nhiệt độ cao, Leica LS10, LS15 luôn mang lại kết quả đáng tin cậy không ảnh hưởng bởi bức xạ mặt trời trực tiếp.</span></span><br />
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chăm sóc khách hàng chỉ với một cú nhấp chuột.</strong> </span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông qua <a href="https://leica-geosystems.com/services-and-support/customer-support-services/active-customer-care">ACTIVE CUSTOMER CARE</a> - một mạng lưới toàn cầu gồm các chuyên gia giàu kinh nghiệm bạn sẽ được hướng dẫn một cách thành thạo mọi vấn đề:<br />
- Loại bỏ sự chậm trễ với dịch vụ kỹ thuật cao cấp<br />
- Hoàn thành công việc nhanh hơn với hỗ trợ tư vấn tuyệt vời<br />
- Tránh các lần truy cập trang web tốn kém với dịch vụ trực tuyến để gửi và nhận dữ liệu trực tiếp từ hiện trườn</span></span>g.<br />
<br />
<ul>
<li>
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cài đặt nhanh chóng và thuận tiện</span></span></strong></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả và giảm thời gian làm việc với Leica LS10, LS15. Sử dụng núm lấy nét để cài đặt nhanh chóng. Chuyển động tốt mang lại một hình ảnh hoàn hảo. LS10 & LS15 cung cấp cho bạn một mức độ bảo mật cao!</span></span><br />
<br />
<br />
<iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="394" src="https://www.youtube.com/embed/lBe6-DiokBQ" title="YouTube video player" width="700"></iframe>',
'images' => '20221227151040ffcdeffa3829f4a633ea0b404e2b4a0a.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy thuỷ bình Leica',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-25',
'modified' => '2026-07-12',
'status' => '1',
'view' => '26500',
'slug' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '215',
'rght' => '216',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 7 => array(
'Post' => array(
'id' => '635',
'name' => 'Ống nhòm và những lưu ý khi mua ống nhòm',
'code' => null,
'alias' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tìm hiểu về ống nhòm và tham khảo một số lưu ý khi chọn ống nhòm!</span></span>',
'content' => '<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Ống nhòm là gì?</strong></span></span></h2>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm, còn gọi là ống ngắm hay con mắt xa, là một hệ hai kính viễn vọng quang học được gắn cạnh nhau và cùng hướng, cho phép người quan sát đặt cả hai mắt để quan sát các vật ở xa. Cấu tạo gồm vật kính, thị kính và thường có thêm hệ thống lăng kính. Vật kính bao gồm một thấu kính hội tụ, thị kính là thấu kính hội tụ có tiêu cự nhỏ nhất nhưng sẽ làm hình ảnh bị ngược nên cần thêm lăng kính đảo ảnh.<br />
<br />
* Cấu tạo ống nhòm gồm một hệ thống hai thấu kính hội tụ đặt đồng trục.</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vật kính L1: tiêu cự f1 rất dài (vài m)</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thị kính L2: tiêu cự f2 ngắn (vài cm) và được sử dụng như kính lúp</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách giữa thị kính và vật kính thay đổi được.<br />
<br />
<img alt="" src="/admin/webroot/upload/image/images/Cấu tạo ống nhòm.png" style="width: 300px; height: 383px;" /><br />
<br />
</span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Tìm hiểu về các thông số về ống nhòm</strong></span></span></h2>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thường ta hay nhìn thấy ký hiệu 7×50, 8×40, 10×42, 15×70, 25×100… ở trên các ống nhòm. Hai chữ số này nói lên điều gì?<br />
<br />
<u>Ví dụ</u>: <span style="color:#000000;"><span style="text-align: justify;">Ống nhòm Nikon MONARCH 7 10x42</span></span><br />
<br />
<strong>10</strong> - số đằng trước dấu nhân (x) sẽ là độ phóng đại của ống nhòm đó (tức là 10 lần).<br />
<strong>42</strong> - số đằng sau dấu nhân sẽ là đường kính của vật kính ống nhòm theo đơn vị millimet ( tức là 42mm).<br />
<br />
Thông số độ phóng đại có nghĩa là bạn sẽ nhìn vật đó gần lại bạn 10 lần theo tỉ lệ xấp xỉ 1/10. Có nghĩa là bạn nhìn một vật xa 1km bằng ống nhòm, thì khi đó như bằng mắt thường bạn nhìn 100m.<br />
<br />
Nhiều bạn hay thắc mắc một câu hỏi khi mua ống nhòm: <strong>ống nhòm này nhìn bao xa?</strong> Thực chất cái xa vô cùng mà mình nói ở đây nó là một vật đủ lớn mà khi nhìn qua ống nhòm chúng ta có thể thấy nó và nhìn được hình dạng của nó. Điều quan trọng mà các bạn hay bỏ quên đó là ”chất lượng ảnh như thế nào?” thì rất ít bạn quan tâm. Đây là điều quan trọng để đánh giá một chiếc ống nhòm tốt hay không?</span></span></p>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường kính vật kính là thông số được tính bằng đơn vị mm. Nếu vật kính càng lớn thì khả năng thu sáng và chất lượng ảnh của bạn sẽ càng tốt và ngược lại. Tuy nhiên nếu mà lớn quá thì một trong những nhược điểm đó là ảnh quan sát thu được sẽ bị sai sắc (là điều không thể tránh khỏi). Bởi vậy khi lựa chọn mua ống nhòm thì các bạn nên chọn sao cho phù hợp với độ phóng đại ống nhòm mà mình mong muốn. Ví dụ 7×50, 8×40, 10×42, 10×50, 12×60, 15×70…</span></span></p>
<p>
</p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Xuất xứ tất cả các loại ống nhòm hiện nay</strong></span></span></h2>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm hiện nay có ba nguồn gốc xuất xứ chính, đó là tự lực sản xuất sản phẩm, OEM và ODM. Vậy những khái niệm này là gì?</span></span></p>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Những sản phẩm đến từ các thương hiệu tự lực sản xuất có nghĩa là ống nhòm của thương hiệu này được thiết kế và gia công bởi chính một đơn vị. Tuy nhiên hiện nay có khá ít thương hiệu có thể tự lực sản xuất được mà không nhờ bên thứ ba. Đối với những sản phẩm được tự lực sản xuất này thì sẽ mang đậm dấu ấn của thương hiệu và không bị ảnh hưởng bởi các yếu tố kỹ thuật từ các bên. Tuy nhiên những chiếc ống nhòm được tự lực sản xuất có giá thành khá cao.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm <strong>OEM</strong> là những chiếc ống nhòm được công ty chủ chủ quản thiết kế nhưng lại không trực tiếp gia công, mà phải nhờ đến một bên thứ 3. Đơn vị gia công sẽ hoàn thiện sản phẩm dựa trên bản thiết kế và chịu sự kiểm soát chất lượng từ đơn vị chủ quản thiết kế. Với hình thức này thì sản phẩm thường có giá thành rẻ hơn nhưng về dấu ấn thương hiệu của sản phẩm thì không nổi bật nhiều.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Và hình thức cuối cùng là sản phẩm <strong>ODM</strong>, những sản phẩm ống nhòm thường đến từ các thương hiệu có khả năng kinh doanh nhưng không có khả năng thiết kế hay gia công sản phẩm. Ống nhòm của những thương hiệu này sẽ được đặt thiết kế và gia công ở một đơn vị nào đó và in thương hiệu của mình lên.</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc xác định được nguồn gốc của sản phẩm cũng là cách chọn mua ống nhòm mà bạn nên lưu tâm. Mỗi thương hiệu đều có một ưu nhược điểm riêng, tùy vào nhu cầu bạn có thể lựa phương thức sản xuất phù hợp.<br />
<br />
</span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Phân loại các loại ống nhòm hiện nay theo chức năng</strong></span></span></h2>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường có rất nhiều loại ống nhòm khác nhau, dưới đây là một số loại ống nhòm phố biến được nhiều người lựa chọn nhất.<br />
- <strong>Ống nhòm mini</strong> là loại ống nhòm có kích thước gọn nhẹ đến bất ngờ, tuy nhiên tầm nhìn thì hơi hạn chế. Loại ống nhòm này có kích thước rất nhỏ nên có thể bỏ trong balo, túi xách để mang theo bên người, trong các chuyên tham quan, thám hiểm, du lịch.<br />
- <strong>Ống nhòm ban đêm</strong> là loại ống nhòm có khả năng nhìn xuyên bóng tối nhờ được trang bị đèn hồng ngoại. Hình ảnh nhìn được trong bóng tối qua ống nhòm hồng ngoại thường không màu. Ngoài ra, loại ống nhòm hồng ngoài ngày còn được tích hợp tích năng ghi hình, chụp ảnh.<br />
- <strong>Ống nhòm chụp ảnh</strong> là loại ống nhòm được tích hợp thêm chức năng bắt lại những khoảnh khắc đẹp khi chúng ta quan sát. Tuy nhiên, vì không phải là thiết bị chuyên về chụp ảnh nên hình ảnh chụp được có chất lượng còn hạn chế.<br />
- <strong>Ống nhòm đo khoảng cách</strong> là loại ống nhòm ngoài việc quan sát một đối tượng thì còn đo được khoảng cách từ chỗ chúng ta đứng đến vật thể. Ngoài ra, loại ống nhòm này còn được tích hợp tính năng đo góc, đo chiều cao<br />
- <strong>Ống nhòm nhiệt</strong> loại ống nhòm hiện đại có khả năng hiển thị thân nhiệt của đối tượng bạn đang quan sát, cũng như phân biệt được đối tượng với môi trường xung quanh nhờ sự chênh lệch nhiệt độ.<br />
<br />
</span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Một số lưu ý khi chọn ống nhòm phù hợp với nhu cầu</strong></span></span></h2>
<p>
</p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.1 Kích thước ống nhòm</strong></span></span></h3>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ống nhòm có kích thước lớn Full-Size (8x42, 10x50)<br />
Các dòng ống nhòm có kích thước lớn thường thu nhận ánh sáng tốt hơn, có thể xem và quan sát trong điều kiện ánh sáng yếu như lúc bình minh hay hoàng hôn. Các ống nhòm này sẽ cung cấp cho bạn cái nhìn rộng lớn về quang cảnh phía trước, thích hợp cho ngắm chim, động vật hoang dã,... nhưng ngược lại kích thước của chúng lại lớn và thường rất nặng.<br />
<br />
- Ống nhòm có kích thước trung bình Mid-Size (7x40, 16x32, 10x42)<br />
Các dòng ống nhòm có kích thước trung bình thường được sử dụng cho ngắm cảnh thiên nhiên, cho các hoạt động du lịch dã ngoại hoặc sử dụng để quan sát các buổi biểu diễn, xem các trận bóng đá,... Ống nhòm này có kích thước vừa phải, khả năng quan sát tốt, trọng lượng phù hợp với mọi người. Tuy nhiên mức độ truyền dẫn ánh sáng lại không được bằng ống nhòm có kích thước lớn.<br />
<br />
- Ống nhòm có kích thước nhỏ gọn - ống nhòm mini (6x18, 8x21)<br />
Các loại ống nhòm này thường thích hợp để sử dụng cho các hoạt động ban ngày. Đây là loại ống nhòm có kích thước nhỏ gọn, cầm vừa tay, thoải mái khi sử dụng trong thời gian dài.</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/genmedia_PIC1739447_RL_02_w1500_h1500_c217224230255(1).jpg" style="width: 420px; height: 420px;" /></span></span></p>
<p style="text-align: center;">
</p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.2 Độ phóng đại của ống nhòm</strong></span></span></h3>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi ống nhòm thường được xác định bởi hai cặp số. Số đầu tiên chỉ độ phóng đại của ống nhòm và số thứ 2 thể hiện đường kính vật kính của ống nhòm. Ở đây ta thấy đối với ống nhòm có độ phóng đại lớn hình ảnh quan sát được sẽ càng gần hơn. Tuy nhiên, nếu bạn chọn ống nhòm có độ phóng đại quá lớn, ống nhòm siêu zoom thì kích thước lớn sẽ làm tăng độ rung khi tay bạn cầm không chắc dẫn đến hiện tượng mỏi mắt.<br />
<br />
</span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.3 Đường kính ống kính mục tiêu rộng</strong></span></span></h3>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giống như độ phóng đại, thông số thứ 2 của ống nhòm là về đường kính ống kính vật kính. Đường kính ống kính càng rộng cho phép tiếp nhận càng nhiều ánh sáng hơn. Khi nhiều ánh sáng bạn sẽ quan sát thấy hình ảnh tươi sáng hơn đặc biệt là trong điều kiện ánh sáng yếu như hoàng hôn hay lúc bình minh.</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ong-nhom-hong-ngoai-2-mat-co-ghi-hinh-4x50mm-equinox-z_2253.png" style="width: 420px; height: 329px;" /></span></span></p>
<p style="text-align: center;">
</p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.4 Thoát sinh học - Exit Pupil</strong></span></span></h3>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ thoát sinh học cho biết ảnh, độ sáng của vật thể khi đang quan sát. Nếu thông số này lớn sẽ làm cho hình ảnh quan sát được rõ nét hơn, tươi sáng hơn. Cách tính toán thông số này bằng cách lấy đường kính phóng đại chia cho độ phóng đại của ống kính. Nếu thông số này nằm ở ngưỡng 7 thì đó là ống kính tốt có thể lựa chọn để quan sát các vật trong ánh trời sáng trăng, lúc ánh sáng yếu, ở ngưỡng 5mm hoặc cao hơn sẽ thích hợp cho quan sát ban ngày hoặc ánh sáng yếu.<br />
<br />
</span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.5 Khoảng cách đặt mắt - Relief Eye</strong></span></span></h3>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Relief Eye là khoảng cách đặt mắt giữa thị kính tới mắt của bạn sao cho khả năng quan sát tốt nhất thoải mái nhất. Khoảng đặt mắt càng lớn bạn lại càng phải đưa ống nhòm ra xa hơn so với mắt mình, nhưng lại tốt đối với những người đeo kính (đối với những người đeo kính nên chọn thông số này là 11mm hoặc cao hơn).<br />
<br />
</span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.6 Trường nhìn</strong></span></span></h3>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trường nhìn là thông số cho phép bạn biết độ rộng khu vực mình muốn quan sát tại khoảng cách 1000m từ nơi bạn đang đứng. Trường nhìn rộng để quan sát thiên nhiên, quan sát động vật, trường nhìn hẹp giúp quan sát các đối tượng ít di chuyển.</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/nikon-coolshot-40-i-4(1).jpg" style="width: 420px; height: 420px;" /></span></span></p>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.7 Hệ thống lấy nét</strong></span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm thường được trang bị hệ thống lấy nét ở trung tâm cho cả hai mắt, hoặc điều chỉnh diop trên cả hai mắt. Việc điều chỉnh diop trên hai mắt giúp bù đắp những hạn chế về thị lực giữa hai mắt của bạn.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.8 Lớp phủ thấu kính</strong></span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm giá rẻ thường không được tráng phủ nhiều lớp ra vậy cảm giác nhìn qua ống nhòm này thường mờ và không rõ nét. Lớp phủ thấu kính giúp giảm sự phản xạ ánh sáng và tăng khả năng truyền dẫn ánh sáng.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.9 Khả năng chống nước và kháng thời tiết</strong></span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng chống nước trên ống nhòm có thể là khả năng chịu nước, khả năng chống thấm, khi sử dụng ở điều kiện thời tiết thay đổi, nhiệt độ thay đổi.<br />
Các loại ống nhòm du lịch thường được trang bị khả năng chống nước mưa, ống nhòm quân sự, ống nhòm hải quân có thể được trang bị thêm khả năng chịu được áp lực nước hoặc nổi trên mặt nước.<br />
<br />
</span></span>
<h3>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.10 Khả năng chống đọng sương</strong></span></span></h3>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm giá rẻ thường bị mờ sương khi di chuyển qua lại giữa các vùng có nhiệt độ khác nhau. Mờ sương gây nhiều phiền toái cho bạn, thậm chí có thể làm hỏng ống nhòm nếu không loại bỏ độ ẩm đó ra khỏi ống nhòm.<br />
Hiện nay, các ống nhòm chuyên dụng, ống nhòm cao cấp đã được bơm các loại khí trơ, khí nitor bên trong ống nhòm để tránh gây hiện tượng ngưng tụ hơi nước. Điều này giúp bảo vệ ống nhòm của bạn tránh đọng sương lên bền mặt ống kính.</span></span><br />
<br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Địa chỉ mua ống nhòm/ ống nhòm đo khoảng cách uy tín</span></span></h2>
<p id="2-dia-chi-mua-thiet-bi-may-bay-khong-nguoi-lai-uav-uy-tin" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;">
</p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại ống nhòm/ ống nhòm đo khoảng cách của các hãng Leica, Nikon, Barska, Garmin, Terrinox, Steiner, SNDWAY, ... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<div style="margin: 0px; padding: 0px; line-height: 20px;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="color: rgb(51, 51, 51); text-align: justify;"> </span><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div>
<br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" />
<br style="margin: 0px; padding: 0px;" />
Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" />
Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" />
Tel: 024.37764930<br style="margin: 0px; padding: 0px;" />
Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" />
Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" />
Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"> </span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span><br />
',
'images' => '20210714155415df03af942339bf722676fd2f752f2a1f.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'ống nhòm đo khoảng cách',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-14',
'modified' => '2026-07-12',
'status' => '1',
'view' => '24581',
'slug' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '213',
'rght' => '214',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 8 => array(
'Post' => array(
'id' => '634',
'name' => 'Phụ kiện trắc địa',
'code' => null,
'alias' => 'phu-kien-trac-dia',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span>',
'content' => '<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Phụ kiện trắc địa là gì?</span></span></h2>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span></span></p>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hầu hết những phụ kiện trắc địa đều thiết kế có thể tách rời với máy, phòng trong những trường hợp bị hư hỏng, chỉ phải thay thế phụ kiện mới. Điều này khiến cho việc lắp ráp phụ kiện cũng như sử dụng các máy trắc địa được linh hoạt với mọi trường hợp.<br />
Phụ kiện đo đạc, trắc địa bao gồm nhiều loại khác nhau ứng dụng cho các thiết bị đo đạc ( máy thủy bình, máy kinh vĩ điện tử, máy toàn đạc điện tử, máy định vị GPS) như: thước thép, bật mực, đế dọi tâm, thước đẩy bánh xe, mốc sứ, thùng máy, gương sào, đế dọi tâm, chân mia, dây cáp, pin sạc,…</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/PHỤ KIỆN TRẮC ĐỊA(2).png" style="width: 680px; height: 544px;" /></span></span></p>
<p style="text-align: center;">
</p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lưu ý khi lựa chọn phụ kiện trắc địa</span></span></h2>
<br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải đảm bảo phù hợp với cấu tạo của máy, chức năng của máy.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải cùng hãng sản xuất hoặc phải là sản phẩm chính hãng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải phù hợp với công suất của máy, tránh trường hợp chọn phụ kiện có công suất thấp hoặc lớn hơn công suất thực của máy gây hư hỏng.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải có cấu tạo tính năng tương đồng với từng đời máy</span></span></li>
</ul>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Phụ kiện máy(2).jpg" style="width: 620px; height: 803px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Địa chỉ mua phụ kiện trắc địa uy tín</span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại phụ kiện trắc địa: chân máy toàn đạc, chân máy thủy bình, mia 5m, mia Invar, sào gương, pin máy toàn đạc, sạc pin máy toàn đạc, đế máy, cáp trút số liệu,... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;">
<br style="margin: 0px; padding: 0px;" />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> </span><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></span></span></div>
<br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" />
<br style="margin: 0px; padding: 0px;" />
Số 145 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" />
Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" />
Tel: 024.37764930<br style="margin: 0px; padding: 0px;" />
Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" />
Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" />
Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" />
<span style="margin: 0px; padding: 0px;"> </span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" />
<span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span></span></span>',
'images' => '20211207150823dc9ff8b8d2712352c76fd4e56030baca.png',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Phụ kiện trắc địa',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-12',
'modified' => '2026-07-12',
'status' => '1',
'view' => '24887',
'slug' => 'phu-kien-trac-dia',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '211',
'rght' => '212',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
),
(int) 9 => array(
'Post' => array(
'id' => '632',
'name' => 'Một số lưu ý khi chọn mua máy bộ đàm',
'code' => null,
'alias' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng chúng tôi tham khảo một số lưu ý để lựa chọn cho mình một chiếc bộ đàm phù hợp nhé!</span></span>',
'content' => '<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Lựa chọn băng tần sử dụng</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm cầm tay và máy bộ đàm cố định có 2 loại băng tần là VHF (136 – 174MHz) và UHF (400 – 527MHz).<br />
<br />
Nếu mua thêm để dùng chung với máy có sẵn, phải xác định máy bộ đàm đang dùng là loại băng tần nào (VHF hay UHF) và model là gì. Trong trường hợp đây là lần đầu tiên mua bộ đàm và chỉ có nhu cầu dùng chúng với nhau thì người dùng có thể chọn loại băng tần nào cũng được. Tùy thuộc vào địa hình, khu vực sử dụng và để đảm bảo liên lạc xa nhất, tốt nhất bạn nên chú ý:</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ở vị trí khu vực trống trải, ít vật cản nên chọn băng tần VHF.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại khu vực nhà cao tầng, nhiều công trình dân dụng, trong thành phố nên chọn tần số UHF.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cũng cần lưu ý đến khả năng được cấp phép sử dụng tần số tại vùng sử dụng bộ đàm.</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Lưu ý:</strong></span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách liên lạc tối đa giữa hai máy cầm tay tại khu vực trống trải là khoảng 3km, trong thành phố không quá 2km. Những vị trí càng đông dân cư, càng nhiều công trình kiến trúc. Mật độ dân cư đông thì cự ly sẽ rút ngắn lại.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ đàm cầm tay có thể liên lạc với trung tâm của mình ở cự ly xa hơn so với cự ly giữa 2 máy cầm tay. Điều kiện là máy tại trung tâm phải có công suất lớn. Và anten đặt trên cột cao (càng cao thì liên lạc càng xa).</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu muốn tăng cự li liên lạc giữa các máy với nhau, có thể chọn dùng Repeater (Bộ lặp) với anten lắp trên cao.</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><img alt="" src="/admin/webroot/upload/image/images/1534383704-bodam_02.jpg" style="width: 480px; height: 360px;" /></strong></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Lựa chọn dòng máy phù hợp</strong></span></span></h2>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tùy thuộc vào khả năng tài chính cũng như nhu cầu mà lựa chọn dòng máy phù hợp. Trên thị trường hiện nay có khá nhiều thương hiệu máy bộ đàm. Nổi bật hơn cả là các dòng máy đến từ thương hiệu Motorola, Icom và Kenwood. Các dòng sản phẩm khác được đánh giá là có độ bền kém hơn, chất lượng thu phát cũng không tốt bằng.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu dùng cho công trường xây dựng hay dịch vụ bảo vệ thì nên chọn loại có cấu hình trung bình. Motorola CP1100, CP1300, GP3188 loại không bàn phím với khả năng kháng nước, chống bụi, chống va đập tốt là một gợi ý.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các công ty vận tải, vận chuyển hàng hóa/hành khách…thì có thể chọn máy bộ đàm gắn xe cố định như Motorola GM3188, GM338. Nếu công ty yêu cầu đảm bảo quản lý liên lạc tại nhiều khu vực địa lý có khoảng cách xa thì phải chọn dòng máy kĩ thuật số.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Với bộ đàm dùng cho nhà hàng, khách sạn, khu công nghiệp thì nên chọn dòng máy bộ đàm cầm tay giá rẻ như Motorola MagOne A8, GP2000s, Kenwood TK-2107 hay Icom IC-F3003 đều được.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các đơn vị chuyên nghiệp mà yêu cầu sản phẩm cần phải đảm bảo an ninh để liên lạc thông suốt kể cả trong điều kiện thời tiết khắc nghiệt, môi trường phức tạp như Công an, Bộ đội, phục vụ công tác Phòng chống thiên tai, bão lũ, các công ty dầu khí…bộ đàm được lựa chọn phải là dòng chuyên nghiệp, chuyên dụng và hiệu suất cao\</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm phổ thông có giá thành tương đối rẻ, cấu hình vừa đủ đáp ứng những yêu cầu đơn giản. Vừa hài hòa về chi phí, vừa mang lại hiệu quả công việc. Trong khi đó, các dòng sản phẩm chuyên nghiệp thường có mức giá cao hơn với nhiều tính năng hơn.<br />
<br />
Có thể nói, dòng sản phẩm máy bộ đàm đến từ thương hiệu Motorola hiện đang đứng đầu về công nghệ (cả analog và digital). Nhờ vào ưu điểm là độ bền cao, khả năng chống chịu tốt cũng như cách vận hành đơn giản. Các dòng sản phẩm chuyên dụng có thể kể đến như Motorola GP3188, GP328, XiR P8200/8208, P8260/8268…</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/business-radios-2021.png" style="width: 480px; height: 238px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br />
<h2 style="box-sizing: border-box; margin-top: 0px; margin-bottom: 0.5rem; font-weight: 500; line-height: 1.2; font-size: 20px; color: rgb(68, 68, 68); font-family: Roboto, sans-serif;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; font-weight: 600;">3. Lựa chọn máy bộ đàm với những tính năng phù hợp</span></span></span></h2>
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát RF: Máy cầm tay thường có công suất tối đa khoảng 5W, con số này càng cao thì cự ly liên lạc càng lớn.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất âm thanh: Nếu sử dụng trong môi trường ồn ào, nhiều tiếng động. Thì nên chọn máy công suất lớn có bộ lọc âm thanh tốt.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các tính năng bảo vệ: Máy được thiết kế với kết cấu vững chắc, theo tiêu chuẩn quân đội Mỹ (MIL-STD810), chống nước, chống nổ…</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mạch mã hóa và giải mã PL/DPL, CTCSS/DTCS: Tránh được những cuộc liên lạc không cần thiết khi nhiều người dùng chung 1 kênh tần số.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng kích phát bằng giọng nói (VOX) để hoạt động khi rảnh tay</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng nhập tần số từ bàn phím của máy: Thường được trang bị ở các dòng máy phổ thông. Tuy vậy, tính năng này lại khiến người dùng vô tình làm sai tần số kênh đã đặt ra khiến máy bộ đàm không liên lạc được với máy khác.</span></span></li>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng bảo mật thông tin: Nhiều cấp bảo mật khác nhau như Voice Scramler, AES/DES…</span></span></li>
</ul>
<p style="text-align: center;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br />
<img alt="" src="/admin/webroot/upload/image/images/MotorolaG3588.jpg" style="width: 480px; height: 480px;" /></span></span></p>
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Chọn phụ kiện bộ đàm</strong></span></span></h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin bộ đàm</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên chọn pin dung lượng lớn, thời gian sử dụng lâu cho mỗi lần sạc. Pin cho máy bộ đàm nên từ 1000mAh – 2200mAh với thời gian hoạt động tối đa đến 19 giờ.<br />
Pin Li-Ion có dung lượng lớn và tuổi thọ pin cao có thể sạc bất cứ lúc nào mà không cần dùng hết trước khi sạc như các loại pin khác. Pin Ni-MH có dung lượng và tuổi thọ pin thấp hơn Li-Ion. Muốn pin sử dụng bền lâu thì không thể sạc nhồi mà phải dùng hết trước khi sạc lại. Trong trường hợp dùng lâu, để tránh bị hết pin bất ngờ, hãy mua thêm pin dự phòng để đảm bảo liên lạc được thông suốt.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ sạc</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu không có thời gian sạc pin lâu, hãy sử dụng bộ sạc nhanh, nhanh hơn bộ sạc chuẩn từ 3-5 giờ.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Loa – Micro và các loại tai nghe choàng đầu, áp cổ</span></span></li>
</ul>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo liên lạc kể cả khi đeo máy thường xuyên ở thắt lưng, trên cầu vai/gắn trên cổ áo. Phù hợp với những ai thường xuyên dùng tay cho những công việc khác như bảo an, nhân viên phục vụ…<br />
Tai nghe choàng đầu và bộ áp cổ khi dùng với máy có chức năng kích phát bằng giọng nói (VOX) sẽ giúp rảnh tay hoàn toàn khi liên lạc bằng bộ đàm. Bộ áp cổ sẽ giúp âm thanh gửi đi trong hơn, không có tiếng ồn kể cả khi đang nói trong khu vực nhiều tiếng ồn.</span></span><br />
<ul>
<li>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten</span></span></li>
</ul>
<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm của mỗi hãng khác nhau đều kèm theo anten tiêu chuẩn, cho cự li liên lạc tốt nhất. Loại cải tiến kích có thước ngắn hơn giúp máy gọn và đỡ vướng víu. Anten không phù hợp có thể làm hư hỏng máy. Do vậy, nếu cần một anten mới, hãy chọn đúng mã số của loại kèm theo máy.</span></span></p>
<p style="text-align: center;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/bo-dam-motorola-gp-3588-plus(1).jpg" style="width: 480px; height: 270px;" /></span></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br />
<h2>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ mua máy bộ đàm uy tín</span></span></h2>
<p>
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên phân phối các loại máy bộ đàm của các hãng Motorola, Kenwood, Icom, Hypersia,... lâu năm uy tín trên toàn quốc.</span></p>
<div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> <span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<br style="margin: 0px; padding: 0px;" />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" />
<br style="margin: 0px; padding: 0px;" />
Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" />
Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" />
Tel: 024.37764930<br style="margin: 0px; padding: 0px;" />
Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" />
Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" />
Email: tracdiathanhdat@gmail.com</span></span></span></span><br style="margin: 0px; padding: 0px;" />
</p>
<p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">@ Luôn đồng hành cùng bạn!</strong><span style="margin: 0px; padding: 0px;"> </span></span></span></p>
',
'images' => '20210709160653d0336e3b94fd76fc2ef669058d11917a.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'máy bộ đàm',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-07-09',
'modified' => '2026-07-12',
'status' => '1',
'view' => '15419',
'slug' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '209',
'rght' => '210',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
)
)
$detailNews = array(
'Post' => array(
'id' => '494',
'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử',
'code' => null,
'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu',
'cat_id' => '40',
'price' => '0',
'type' => 'new',
'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>',
'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li>
</ul>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li>
</ul>
<p>
<img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p>
<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p>
<p>
</p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p>
<p>
</p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li>
</ul>
<p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li>
</ul>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li>
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li>
</ul>
<ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;">
<li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;">
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li>
</ul>
<div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;">
<img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div>
',
'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg',
'images_multi' => '',
'pos' => null,
'new' => null,
'hot' => null,
'saleoff' => null,
'title_seo' => 'Máy kinh vĩ',
'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'created' => '2017-09-11',
'modified' => '2026-07-12',
'status' => '1',
'view' => '40085',
'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '19',
'rght' => '20',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'parent_id' => null,
'alias' => 'kien-thuc-ung-dung',
'images' => '',
'lft' => '103',
'rght' => '104',
'pos' => '5',
'status' => '1',
'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế',
'meta_key' => '',
'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc.
',
'created' => '2015-12-16',
'modified' => '2026-02-24',
'slug' => 'kien-thuc-ung-dung',
'cate' => '4',
'link' => 'tin-tuc',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!',
'display' => '0',
'content_eng' => null
)
)
$setting = array(
'id' => '1',
'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt',
'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)',
'address_eng' => '',
'address' => '<p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p>
<p>
<span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br />
Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p>
<div>
<p>
<strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p>
</div>
<p>
<span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p>
<p>
<span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br />
<br />
<a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p>
',
'contactinfo_eng' => '',
'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br />
<br />
1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br />
2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br />
3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br />
4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br />
5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội',
'contactinfo' => '<div dir="rtl" style="text-align: left;">
<u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div>
<div style="">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br />
Tel: (024) 3776 4930 <br />
Fax: (024) 3776 5908<br />
Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br />
Hotline: <strong>0913 051 734</strong><br />
<br />
<strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br />
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br />
</div>
<div style="">
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div>
<div style="">
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div>
<div style="">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br />
<br />
- 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br />
<img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div>
',
'telephone' => '01659 014592',
'hotline' => '0913 051 734',
'email' => 'tracdiathanhdat@gmail.com',
'url' => '',
'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ',
'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!',
'created' => '2012-06-05',
'modified' => '1783492910',
'youtube' => 'http://youtube.com',
'twitter' => 'https://twitter.com/',
'myspace' => 'https://myspace.com/',
'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/',
'email2' => 'duycuong7640',
'skype' => 'hothihuyen.hn',
'yahoo' => 'duycuong7640',
'yahoo1' => 'duycuong7640',
'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873',
'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>',
'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux',
'slogan_eng' => '',
'printer' => '',
'googleplus' => '',
'bando' => '<p>
<iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p>
',
'gioithieu' => '<p style="text-align: center;">
<img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p>
',
'thongtincongty' => 'Sửa máy lạnh tại nhà
Sửa máy lạnh tại HCM
Sửa tủ lạnh
Bơm ga máy lạnh ',
'trogiupkh' => 'Tai nghe Iphone
Sua may tinh tai nha
Máy Ozone Z755',
'dichvuft' => 'Sửa máy lạnh
Bảo dưỡng máy lạnh
Vệ sinh máy lạnh
Lắp đặt máy lạnh',
'bb' => '',
'zing' => '',
'hotline2' => '0912 35 65 75',
'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script>
<script>
(function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){
(i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o),
m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m)
})(window,document,'script','//www.google-analytics.com/analytics.js','ga');
ga('create', 'UA-72584674-1', 'auto');
ga('send', 'pageview');
</script>
<!-- Global site tag (gtag.js) - Google Ads: 876059345 -->
<script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script>
<script>
window.dataLayer = window.dataLayer || [];
function gtag(){dataLayer.push(arguments);}
gtag('js', new Date());
gtag('config', 'AW-876059345');
</script>
<script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>',
'theh1' => 'thanhdatsurvey.JSC',
'hanoi' => '<div>
<strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div>
<div>
<strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div>
<div>
<strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div>
<div>
<strong>Email </strong>: info@ifes.vn</div>
',
'tphcm' => '<div>
<strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div>
<div>
<strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div>
<div>
<strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div>
<div>
<strong>Email </strong>: info@ifes.vn</div>
',
'tt' => '',
'pp' => 'https://www.facebook.com/ruaxetudong.net',
'tphcm_eng' => '',
'hanoi_eng' => '',
'hotline_eng' => '',
'name_eng' => '',
'chinhsach' => null,
'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>',
'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>',
'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;">
<span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br />
<br />
Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br />
</p>
<span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>',
'gt_eng' => ''
)
$tin_ft = array(
(int) 0 => array(
'Post' => array(
'id' => '588',
'name' => 'Hướng dẫn mua hàng',
'code' => null,
'alias' => 'huong-dan-mua-hang',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<p>
<span style="color:#000000;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br />
<span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> </span></span><span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></p>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="line-height: 107%;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></span></span>
<p>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="color:#000000;">Quý khách có thể mua hàng theo những cách sau:</span></span></span><br />
</p>
<p>
<span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Cách 1: </strong>Đặt hàng trực tiếp tại mục ĐẶT HÀNG (Thêm vào giỏ hàng) trên website: </span></span><span style="font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><a href="https://maytracdiasaoviet.vn/" target="_blank"><span style="color:#000000;">https://tracdiathanhdat.vn/</span></a></span></span><span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;">.</span></span></p>
<p>
<br />
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngay sau khi tiếp nhận thông tin đặt hàng, nhân viên kinh doanh công ty sẽ gọi điện cho quý khách để xác nhận đơn hàng và tiến hành giao hàng cho quý khách ngay trong ngày.</span></span></span></p>
<br />
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Cách 2: </strong>Đặt hàng trực tiếp qua số hotline của công ty <br />
<br />
– Tại trụ sở Hà Nội: <strong>0913 051 734 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br />
<br />
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">– Tại VPGD Hồ Chí Minh:<strong> 0904 925 936 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br />
<br />
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Cách 3: </strong>Quý khách mua hàng trực tiếp tại địa chỉ sau:<br />
<br />
<strong>CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></span></span></span><br />
<div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;">
<br style="margin: 0px; padding: 0px;" />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 145 Láng Hạ, Phường Láng Hạ, Hà Nội</span><br />
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div>
<div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;">
</div>
<div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;">
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rất mong được hợp tác với Quý khách hàng trên cả nước.<br />
<br />
Trân trọng!</span></span></span></div>
',
'images' => '202104071220058398ebc1b9cf669cf602eb8040be387a.jpg',
'images_multi' => '',
'pos' => '1',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Máy trắc địa chính hãng | RTK GNSS, máy toàn đạc, máy thủy bình – Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy RTK GNSS, máy toàn đạc, máy thủy bình, GPS cầm tay chính hãng. Tư vấn kỹ thuật – giao hàng toàn quốc. Trắc địa Thành Đạt – 0913 051 734',
'created' => '2021-04-07',
'modified' => '2026-07-11',
'status' => '1',
'view' => '4244',
'slug' => 'huong-dan-mua-hang',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '143',
'rght' => '144',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 1 => array(
'Post' => array(
'id' => '586',
'name' => 'Chính sách thanh toán',
'code' => null,
'alias' => 'chinh-sach-thanh-toan',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;">
<span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br />
<br />
<span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> <!--[if !supportLineBreakNewLine]--><!--[endif]--></span> </span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chúng tôi c</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">hấp nhận các hình thức thanh toán bằng tiền mặt, chuyển khoản theo đúng quy định pháp luật. </span></span></p>
<p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;">
<img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (22).png" style="width: 320px; height: 183px;" /></p>
<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;">
<span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Quý khách có thể chọn các phương thức thanh toán sau đây:</span></span><br />
<br />
<strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">I. Thanh toán trực tiếp tại cửa hàng<br />
<br />
II. Thanh toán qua hình thức chuyển khoản</span></strong><br />
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Thông tin tài khoản:</span></span></p>
<p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;">
<strong style="color: rgb(0, 0, 0); margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"><em>Chủ tài khoản</em>: CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></p>
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em style="margin: 0px; padding: 0px;"><strong>Số tài khoản</strong></em><em style="margin: 0px; padding: 0px;">: <strong>0611001648635</strong> tại Ngân hàng TMCP Ngoại thương Việt Nam, chi nhánh Ba Đình<br />
<br />
<strong>Nội dung chuyển khoản</strong>: Tên công ty - Thông tin sản phẩm đã mua – Số điện thoại người chuyển tiền</em></span></span></span><br />
<br />
<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;">
<span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Sau khi chuyển khoản hãy thông báo lại cho chúng tôi để chúng tôi kiểm tra và xác nhận lại cho Quý khách.</span></span><br />
<br />
<strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">III. Thanh toán khi nhân viên đến giao nhận hàng</span></strong></span></p>
<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66);">
<span style="color:#000000;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">Quý khách hàng thanh toán trực tiếp bằng tiền mặt cho nhân viên giao hàng của chúng tôi ngay khi kiểm tra và nhận hàng.<br />
<br />
Mọi phản hồi và thắc mắc về việc thanh toán, Quý khách liên hệ <strong>0942 288 388</strong> để được tư vấn.</span></font><br />
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span></span></p>
',
'images' => '20210407122232bf3e6d52a68ca60f97fc6048b14e4acc.jpg',
'images_multi' => '',
'pos' => '2',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-04-07',
'modified' => '2026-07-12',
'status' => '1',
'view' => '3881',
'slug' => 'chinh-sach-thanh-toan',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '139',
'rght' => '140',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 2 => array(
'Post' => array(
'id' => '587',
'name' => 'Chính sách vận chuyển',
'code' => null,
'alias' => 'chinh-sach-van-chuyen',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<div>
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><span style="font-family:verdana,geneva,sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></strong><br />
<br />
Chúng tôi hỗ trợ giao hàng toàn quốc cho Quý khách mua hàng tại hệ thống cửa hàng của chúng tôi.</span></span><br />
</div>
<div>
<p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">Sau khi nhận được thông tin đặt hàng chúng tôi sẽ lập tức xử lý đơn hàng và phản hồi lại thông tin cho khách hàng về việc thanh toán và giao nhận.<br />
<br />
<strong>> Thời gian giao hàng </strong><br />
<br />
- Trong vòng 24 giờ nếu địa điểm giao hàng <b style="color: rgb(74, 74, 74); box-sizing: border-box;">≤ 20 km</b> tính từ cửa hàng của chúng tôi.</span></span></p>
<p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Trong vòng 1-2 ngày nếu địa điểm giao hàng nằm trong phạm vi <b style="box-sizing: border-box">50 - 100 km</b> </span></span><span style="font-family: Arial, sans-serif;"><o:p></o:p></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">tính từ cửa hàng của chúng tôi.<br />
<br />
- Trong vòng 3-5 ngày</span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> nếu địa điểm giao hàng từ <strong>20</strong></span><b style="font-family: tahoma, geneva, sans-serif; font-size: 14px; box-sizing: border-box;">0 km</b><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> trở lên </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">tính từ cửa hàng của chúng tôi.</span></p>
<p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;">
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trước khi vận chuyển, bộ phận giao nhận sẽ liên lạc với Quý khách hàng để xác nhận khoảng thời gian và địa điểm giao hàng cụ thể.</span></p>
<p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;">
<strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">> Phí vận chuyển</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> sẽ được tính theo từng giá trị đơn hàng và được thoả thuận giữa hai bên ngay trước khi giao hàng. </span></p>
<p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;">
<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px;">Mọi thắc mắc liên quan đến việc giao hàng, Quý khách hàng liên hệ số điện thoại <strong>0942 288 388</strong> để được giải đáp và giải quyết kịp thời.<br />
<br />
Trân trọng!</span></span></span></p>
</div>
',
'images' => '20210407122135505ddef64809ce7ee5f9db7cfdfd3e2e.jpg',
'images_multi' => '',
'pos' => '3',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-04-07',
'modified' => '2026-07-12',
'status' => '1',
'view' => '3923',
'slug' => 'chinh-sach-van-chuyen',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '141',
'rght' => '142',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 3 => array(
'Post' => array(
'id' => '585',
'name' => 'Chính sách đổi trả',
'code' => null,
'alias' => 'chinh-sach-doi-tra',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Chúng tôi hỗ trợ đổi trả sản phẩm trong vòng 07 ngày nếu lỗi phát sinh do nhà sản xuất.<br />
<br />
Trong thời gian đổi trả, Công ty CP Công nghệ và Thương mại Thành Đạt sẽ hỗ trợ cung cấp máy móc thay thế kịp thời để công việc khảo sát, đo đạc của Quý khách không bị gián đoạn. Chi phí vận chuyển cho việc đổi trả do hai bên tự thoả thuận.</span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" />
<br />
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">> Điều kiện đổi trả: </span></span></strong></span><br />
<ul>
<li style="box-sizing: border-box;">
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm phải còn nguyên tem mác.</span></span></span></li>
<li style="box-sizing: border-box;">
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm bị lỗi do nhà sản xuất.</span></span></span></li>
<li style="box-sizing: border-box;">
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm không đúng như đơn đặt hàng.</span></span></span></li>
<li style="box-sizing: border-box;">
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lần đổi trả cho 1 sản phẩm là 1 lần</span></span></span></li>
</ul>
<br />
<div style="text-align: start;">
<span style="color:#000000;"><strong><span style="text-align: justify;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">> </span></font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Việc đổi trả sẽ không được chấp nhận nếu:</span> <span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"> </span></span></strong></span></div>
<ul>
<li>
<span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Trong quá trình sử dụng sản phẩm Quý khách không tuân thủ các chỉ dẫn của Nhà sản xuất.</span></span></li>
<li>
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="text-align: justify;">S</span>ản phẩm bị trầy xước, không nguyên vẹn</span></span></span></li>
</ul>
<br />
<span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, chúng tôi cũng hỗ trợ đổi trả sản phẩm vì lý do chủ quan của Quý khách hàng ( muốn đổi sang sản phẩm cùng chủng loại nhưng khác về màu sắc, hãng sản xuất hay thông số kỹ thuật). Chi phí cho việc đổi trả này do Quý khách hàng chịu.</span></span><br />
<br />
<span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"><img alt="" src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/lien-he.jpg" style="margin: 0px; padding: 8px 0px; height: 36px; max-width: 100%; vertical-align: middle; border: 0px; opacity: 1; font-size: 13px; width: 38px;" /><span style="margin: 0px; padding: 0px; font-size: 13px;"> </span></strong></span></span><span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"> </strong></span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Liên hệ hotline <strong>0913 051 734</strong> để được tư vấn đổi trả theo đúng qui định.</span></span>',
'images' => '202104071223177d9b7f6e319f9fa90078c7c61ed9bd19.jpg',
'images_multi' => '',
'pos' => '4',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-04-07',
'modified' => '2026-07-11',
'status' => '1',
'view' => '3915',
'slug' => 'chinh-sach-doi-tra',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '137',
'rght' => '138',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 4 => array(
'Post' => array(
'id' => '583',
'name' => 'Chính sách bảo hành',
'code' => null,
'alias' => 'chinh-sach-bao-hanh',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<div>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="color: rgb(66, 66, 66); text-align: justify;">Tất cả các sản phẩm mua tại hệ thống cửa hàng của chúng tôi đều được bảo hành chính hãng theo quy định của nhà sản xuất. </span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" />
<br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" />
<span style="color: rgb(66, 66, 66); text-align: justify;">Chúng tôi hỗ trợ kỹ thuật 24/7 qua số hotline <strong>0913 051 734</strong> trong suốt quá trình Quý khách sử dụng sản phẩm.</span></span></span></div>
<div>
<br />
<strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">1. Sản phẩm được bảo hành miễn phí: </span></span></strong><br />
<br />
<ul>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm sẽ được bảo hành miễn phí nếu sản phẩm đó còn thời hạn bảo hành (được tính kể từ ngày mua hàng).</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Thời hạn bảo hành được ghi trên Tem Bảo Hành và theo quy định của từng Nhà sản xuất đối với tất cả các sự cố về mặt kỹ thuật.</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Có Tem bảo hành trên sản phẩm.</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi sản phẩm có sự cố kĩ thuật chúng tôi sẽ trực tiếp khắc phục sự cố tại cửa hàng hoặc thay mặt khách hàng mang sản phẩm tới Trung Tâm Bảo Hành của hãng.</span></span></li>
</ul>
<br />
<strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">2. Những trường hợp không được bảo hành (sửa chữa có tính phí): </span></span></strong><br />
<br />
<ul>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm đã quá thời hạn bảo hành hoặc không có Tem bảo hành trên máy.</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hư hỏng do tác động cơ học làm rơi, vỡ, va đập, trầy xước, móp méo, ẩm ướt, hoen rỉ, chảy nước hoặc do hỏa hoạn, thiên tai gây nên.</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hỏng do sử dụng không đúng cách, sử dụng sai điện áp quy định.</span></span></li>
<li>
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Tự ý tháo dỡ, sửa chữa sản phẩm</span></span></li>
</ul>
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span><br />
<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"> </span></span></div>
',
'images' => '20210407123801c4049edabae0c54e2347c82e21413ec3.jpg',
'images_multi' => '',
'pos' => '5',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-04-07',
'modified' => '2026-07-11',
'status' => '1',
'view' => '3646',
'slug' => 'chinh-sach-bao-hanh',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '133',
'rght' => '134',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 5 => array(
'Post' => array(
'id' => '584',
'name' => 'Chính sách bảo mật thông tin',
'code' => null,
'alias' => 'chinh-sach-bao-mat-thong-tin',
'cat_id' => '4',
'price' => '0',
'type' => 'new',
'shortdes' => '',
'content' => '<div>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">1. Mục đích thu nhập thông tin cá nhân</span></span></span></span></h2>
<p style="text-align: justify;">
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51);">Thông tin cá nhân mà chúng tôi thu thập bao gồm: họ tên, địa chỉ giao hàng, địa chỉ email, số điện thoại cố định, số điện thoại di động, cookies.</span></p>
<ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Đối với các giao dịch thanh toán qua cổng thanh toán trực tuyến, Chúng tôi không lưu trữ thông tin số tài khoản, số thẻ ngân hàng của khách hàng, những thông tin này sẽ được cổng thanh toán lưu trữ để phục vụ việc đối soát giao dịch.</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân khách hàng sẽ được sử dụng cho một hoặc tất cả các mục đích sau đây:</span></span></span></span>
<ul style="margin: 0px; padding: 0px 0px 0px 15px;">
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Giao hàng cho quý khách đã mua hàng</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông báo về việc giao hàng và hỗ trợ khách hàng</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Cung cấp thông tin liên quan đến sản phẩm</span></span></span></span></li>
</ul>
</li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoài ra, chúng tôi sẽ sử dụng thông tin của quý khách cung cấp để hỗ trợ quản lý tài khoản khách hàng (nếu có); xác nhận và thực hiện các giao dịch tài chính liên quan đến các khoản thanh toán trực tuyến của quý khách;</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi không được phép thu nhập thông tin nếu khách hàng không tự nguyện, cũng không sử dụng phương thức thu thập thông tin khách hàng bằng các hình thức bất hợp pháp.</span></span></span></span></li>
</ul>
<p style="text-align: justify;">
</p>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">2. Phạm vi sử dụng thông tin</span></span></span></span></h2>
<br />
<ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân thu thập được sẽ chỉ được sử dụng trong nội bộ công ty.</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể chia sẻ tên và địa chỉ của quý khách cho dịch vụ chuyển phát nhanh có uy tín để giao hàng cho quý khách theo cam kết.</span></span></span></span></li>
</ul>
<p style="text-align: justify;">
</p>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">3. Thời gian lưu trữ thông tin</span></span></span></span></h2>
<p style="text-align: justify;">
<br />
<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">Thông tin khách hàng được lưu trữ nội bộ cho đến khi có yêu cầu xóa thông tin từ phía khách hàng.</span></p>
<div style="margin: 0px; padding: 0px; line-height: 20px;">
<div>
<div style="text-align: justify;">
</div>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Những người hoặc tổ chức có thể được tiếp cận với thông tin </span></span></h2>
<br />
<div style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng được tiếp cận với thông tin cá nhân của khách hàng thuộc một trong những trường hợp sau:</span></span><br />
</div>
<div style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Nhân viên của Công ty Cổ phần Công nghệ và thương mại Thành Đạt</span></span></div>
<div style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Các đối tác có ký hợp đồng thực hiện 1 phần dịch vụ của Công ty. Các đối tác này sẽ nhận được những thông tin theo thỏa thuận hợp đồng (có thể 1 phần hoặc toàn bộ thông tin tuy theo điều khoản hợp đồng) để tiến hành hỗ trợ người dùng sử dụng dịch vụ do Công ty cung cấp.</span></span></div>
<div style="text-align: justify;">
</div>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ của đơn vị thu thập và quản lý thông tin</span></span></h2>
<div style="text-align: justify;">
<em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(bao gồm cách thức liên lạc để người tiêu dùng có thể hỏi về hoạt động thu thập, xử lý thông tin liên quan đến cá nhân mình)</span></span></em></div>
<div style="text-align: justify;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ của đơn vị thu thập và quản lý thông tin:</span></span><br />
</div>
<div style="text-align: justify;">
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Công ty Cổ phần Công nghệ và thương mại Thành Đạt </span></span></strong></div>
<div style="text-align: justify;">
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Địa chỉ: số 157 phố Đặng Văn Ngữ, P. Phương Liên, Q. Đống Đa, Tp. Hà Nội</span></span></strong></div>
<div style="text-align: justify;">
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Điện thoại: 0243 7764930</span></span></strong></div>
<div style="text-align: justify;">
<strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Email: tracdiathanhdat@gmail.com<span style="white-space: pre;"> </span></span></span></strong></div>
</div>
</div>
<p style="text-align: justify;">
<br />
<span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Người dùng có thể gọi điện tới tổng đài hỗ trợ và chăm sóc khách hàng </span><strong style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify; margin: 0px; padding: 0px;">0949 322 456</strong><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để điều chỉnh hoặc xóa đi dữ liệu cá nhân của mình.</span><br />
</p>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">6. Cam kết bảo mật thông tin cá nhân khách hàng</span></span></span></span></h2>
<br />
<ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;">
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Không bán, chia sẻ hay trao đổi thông tin cá nhân của khách hàng thu thập trên trang web cho một bên thứ ba nào khác.</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoại trừ các trường hợp về sử dụng thông tin cá nhân như đã nêu trong chính sách này,chúng tôi cam kết không tiết lộ thông tin cá nhân của bạn ra ngoài. Trong một số trường hợp, chúng tôi có thể thuê một đơn vị độc lập để tiến hành các dự án nghiên cứu thị trường và khi đó thông tin của bạn sẽ được cung cấp cho đơn vị này để tiến hành dự án. Bên thứ ba này sẽ bị ràng buộc bởi một thỏa thuận về bảo mật mà theo đó họ chỉ được phép sử dụng những thông tin được cung cấp cho mục đích hoàn thành dự án.</span></span></span></span></li>
<li style="margin: 0px; padding: 0px; line-height: 20px;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể tiết lộ hoặc cung cấp thông tin cá nhân của bạn trong các trường hợp thật sự cần thiết như sau: (a) khi có yêu cầu của các cơ quan pháp luật; (b) trong trường hợp mà chúng tôi tin rằng điều đó sẽ giúp chúng tôi bảo vệ quyền lợi chính đáng của mình trước pháp luật.</span></span></span></span></li>
</ul>
<p style="text-align: justify;">
</p>
<h2 style="text-align: justify;">
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">7. Thay đổi về chính sách</span></span></span></span></h2>
<p style="text-align: justify;">
<br style="margin: 0px; padding: 0px;" />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Nội dung của “Chính sách bảo mật” này có thể thay đổi để phù hợp với các nhu cầu của Công Ty CP Công nghệ và Thương Mại Thành Đạt cũng như nhu cầu và sự phản hồi từ khách hàng (nếu có). </span></span></span></span></p>
</div>
<div style="text-align: justify;">
<br />
<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi hiểu rằng quyền lợi của bạn trong việc bảo vệ thông tin cá nhân cũng chính là trách nhiệm của chúng tôi nên trong bất kỳ trường hợp có thắc mắc, góp ý nào liên quan đến chính sách bảo mật, việc thông tin cá nhân bị sử dụng sai mục đích vui lòng liên hệ qua số điện thoại <strong>0949 322 456</strong> hoặc gửi phản hồi về địa chỉ email: <em><strong>tracdiathanhdat@gmail.com.</strong></em><br />
<br />
Trân trọng!</span></span></div>
',
'images' => '202104071236589b665b2accf17da9077cea4c5dad8e94.jpg',
'images_multi' => '',
'pos' => '6',
'new' => '0',
'hot' => '1',
'saleoff' => null,
'title_seo' => 'Trắc địa Thành Đạt',
'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!',
'created' => '2021-04-07',
'modified' => '2026-07-12',
'status' => '1',
'view' => '3920',
'slug' => 'chinh-sach-bao-mat-thong-tin',
'name_eng' => '',
'shortdes_eng' => '',
'content_eng' => '',
'phut' => null,
'shortdes_tq' => null,
'content_tq' => null,
'name_tq' => null,
'nguoilon' => null,
'treem' => null,
'truso' => null,
'don' => null,
'doi' => null,
'lon' => null,
'tour' => null,
'tourtrongnuoc' => null,
'tournuocngoai' => null,
'noiden' => null,
'ngaydi' => null,
'thangdi' => null,
'namdi' => null,
'ngaykhoihanh' => null,
'thoigiandi' => null,
'ngaykhoihanh_eng' => null,
'thoigiandi_eng' => null,
'videoyou' => null,
'nt' => null,
'duration' => null,
'duration_eng' => null,
'twodaypro' => null,
'twodaypro_eng' => null,
'threedaypro' => null,
'threedaypro_eng' => null,
'photo' => null,
'lft' => '135',
'rght' => '136',
'vat' => null,
'hangsx' => null,
'baohanh' => null,
'tinhtrang' => '1',
'tailieu' => null,
'tag' => null
),
'Catproduct' => array(
'id' => '4',
'name' => 'Chính sách bán hàng',
'parent_id' => null,
'alias' => 'chinh-sach-ban-hang',
'images' => '',
'lft' => '47',
'rght' => '48',
'pos' => '3',
'status' => '0',
'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc',
'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...',
'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!',
'created' => '2015-12-02',
'modified' => '2025-10-29',
'slug' => 'chinh-sach-ban-hang-1',
'cate' => '4',
'link' => 'dich-vu',
'name_eng' => 'Sales Policy',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
)
)
$slideshow = array(
(int) 0 => array(
'Slideshow' => array(
'id' => '1158',
'name' => '',
'images' => '202607021457295d6b626c7966fea8ed15b90188f75e84.png',
'created' => '2026-07-02 14:57:29',
'modified' => '2026-07-02 14:57:29',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 1 => array(
'Slideshow' => array(
'id' => '1157',
'name' => '',
'images' => '20260630144106967d7220891508e0bc589157b72a4a6f.png',
'created' => '2026-06-30 14:41:06',
'modified' => '2026-06-30 14:41:06',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 2 => array(
'Slideshow' => array(
'id' => '1156',
'name' => '',
'images' => '20260627100900c4525d4b0ad85bb7ed6e5f31fbe008ce.png',
'created' => '2026-06-27 10:09:00',
'modified' => '2026-06-27 10:09:00',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 3 => array(
'Slideshow' => array(
'id' => '1153',
'name' => '',
'images' => '2026060910315463c4488ef0eebcd97a80c7be838ec857.png',
'created' => '2026-06-09 10:31:54',
'modified' => '2026-06-09 10:31:54',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 4 => array(
'Slideshow' => array(
'id' => '1151',
'name' => '',
'images' => '20260505105747cef035cfde3d3e4fc486dcc70906dab9.png',
'created' => '2026-05-05 10:57:47',
'modified' => '2026-05-05 10:57:47',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 5 => array(
'Slideshow' => array(
'id' => '1147',
'name' => '',
'images' => '20260504151401463305739b212edcd50d4df28ea21663.png',
'created' => '2026-05-04 15:14:01',
'modified' => '2026-05-04 15:14:01',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 6 => array(
'Slideshow' => array(
'id' => '1111',
'name' => '',
'images' => '2025091214412921cbc3cbc42d3d64fe4364ad8b7a9b7e.png',
'created' => '2025-09-12 14:41:29',
'modified' => '2025-09-12 14:41:29',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 7 => array(
'Slideshow' => array(
'id' => '1099',
'name' => '',
'images' => '20250707100715baf5ecd84c6a8766519b98f66eec1511.png',
'created' => '2025-07-07 10:07:15',
'modified' => '2025-07-07 10:07:15',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 8 => array(
'Slideshow' => array(
'id' => '1096',
'name' => '',
'images' => '202504251616158fbd912c821051db2e9e1ebe215c4da4.png',
'created' => '2025-04-25 16:16:15',
'modified' => '2025-04-25 16:16:15',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 9 => array(
'Slideshow' => array(
'id' => '1055',
'name' => '',
'images' => '202502071107533894de97e081b06e5749a83e6bed2399.png',
'created' => '2025-02-07 11:07:53',
'modified' => '2025-02-07 11:07:53',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 10 => array(
'Slideshow' => array(
'id' => '1008',
'name' => '',
'images' => '20240822084848c3089726a8fff539a5f1adcaaca9cd73.png',
'created' => '2024-08-22 08:48:48',
'modified' => '2024-08-22 08:48:48',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 11 => array(
'Slideshow' => array(
'id' => '961',
'name' => '',
'images' => '202403121029063cfd7328162ff668a881f7e275a1a01d.png',
'created' => '2024-03-12 10:29:08',
'modified' => '2024-03-12 10:29:08',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 12 => array(
'Slideshow' => array(
'id' => '850',
'name' => '',
'images' => '20230605160932d4a880ffcab96141d7a3538bf17255de.png',
'created' => '2023-06-05 16:09:33',
'modified' => '2023-12-25 09:27:46',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 13 => array(
'Slideshow' => array(
'id' => '817',
'name' => '',
'images' => '20230306160629b7490cbbbd5cfd081d8ec1930914a677.png',
'created' => '2023-03-06 16:06:29',
'modified' => '2025-12-23 09:03:28',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
),
(int) 14 => array(
'Slideshow' => array(
'id' => '617',
'name' => '',
'images' => '20220713143712ec1e28dc996e7d39d7535a730ead176e.png',
'created' => '2022-07-13 14:37:12',
'modified' => '2024-12-02 16:11:15',
'status' => '1',
'pos' => '0',
'type' => 'intro',
'link' => '',
'content' => '',
'shortdes' => '',
'content_eng' => '',
'shortdes_eng' => '',
'name_eng' => '',
'name_tq' => '',
'shortdes_tq' => '',
'content_tq' => ''
)
)
)
$adv_khuyenmai = array(
'Advertisement' => array(
'id' => '104',
'name' => null,
'link' => '',
'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png',
'display' => '5',
'created' => '2024-01-16',
'modified' => '2024-06-21',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '121',
'rght' => '122'
)
)
$doitac = array(
(int) 0 => array(
'Advertisement' => array(
'id' => '36',
'name' => null,
'link' => 'http://tracdiathanhdat.vn/bosch',
'images' => '20151223081939be7f9ca66f2fb4e760fb991d89d74002.png',
'display' => '3',
'created' => '2015-12-23',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '33',
'rght' => '34'
)
),
(int) 1 => array(
'Advertisement' => array(
'id' => '33',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/pentax',
'images' => '20151216094854d7903c4f5ae6da9780bc88cbb048d417.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '27',
'rght' => '28'
)
),
(int) 2 => array(
'Advertisement' => array(
'id' => '16',
'name' => null,
'link' => 'http://tracdiathanhdat.vn/topcon',
'images' => '2015121609180430293457191c29e0d0d7a715d26041bd.png',
'display' => '3',
'created' => '2015-12-10',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '7',
'rght' => '8'
)
),
(int) 3 => array(
'Advertisement' => array(
'id' => '27',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/trimple',
'images' => '2015121609470060450f77189189cce8edb27ef59c46d2.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '15',
'rght' => '16'
)
),
(int) 4 => array(
'Advertisement' => array(
'id' => '28',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '20151216094709d0c1b1d5ffcc17a598904261de69c485.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '17',
'rght' => '18'
)
),
(int) 5 => array(
'Advertisement' => array(
'id' => '29',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/kenwood',
'images' => '201512160947288286f4b931bdbc0e64dfd484fc6c12e5.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '19',
'rght' => '20'
)
),
(int) 6 => array(
'Advertisement' => array(
'id' => '30',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/nikon',
'images' => '202210171542300b1b7918f461a4dd8d877236543412d8.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2022-10-17',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '21',
'rght' => '22'
)
),
(int) 7 => array(
'Advertisement' => array(
'id' => '34',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/sincon',
'images' => '20151216095020f699fb43b225af9cb76ffe022e057faf.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '29',
'rght' => '30'
)
),
(int) 8 => array(
'Advertisement' => array(
'id' => '31',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/garmin',
'images' => '201512160948147d3b76212a8ebdd03d45fc49a95a9868.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '23',
'rght' => '24'
)
),
(int) 9 => array(
'Advertisement' => array(
'id' => '26',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/leica',
'images' => '20151216094654c3a83e015935188821aa9ee65e6b322f.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '13',
'rght' => '14'
)
),
(int) 10 => array(
'Advertisement' => array(
'id' => '25',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/sokkia',
'images' => '2015121609464772166f729226cebe52ae986c2699c3a1.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '11',
'rght' => '12'
)
),
(int) 11 => array(
'Advertisement' => array(
'id' => '24',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/foif',
'images' => '2015121609482733afba0b93b9383e6ea26a08124e8a76.png',
'display' => '3',
'created' => '2015-12-16',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '9',
'rght' => '10'
)
),
(int) 12 => array(
'Advertisement' => array(
'id' => '54',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '20210424094203a24f4d5a812351010a6355d888b944ec.png',
'display' => '3',
'created' => '2021-04-24',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '57',
'rght' => '58'
)
),
(int) 13 => array(
'Advertisement' => array(
'id' => '55',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '2021042409421996a13aed03c03b49b7d965db5dbcfdd6.png',
'display' => '3',
'created' => '2021-04-24',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '59',
'rght' => '60'
)
),
(int) 14 => array(
'Advertisement' => array(
'id' => '56',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/motorola',
'images' => '20220805103835e45b76131731a737df5e8dec49916375.jpg',
'display' => '3',
'created' => '2021-04-24',
'modified' => '2022-08-05',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '61',
'rght' => '62'
)
),
(int) 15 => array(
'Advertisement' => array(
'id' => '57',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/yamayo',
'images' => '20250304144532ee8e939d0c9e884e1a50ad352b272730.jpg',
'display' => '3',
'created' => '2021-04-24',
'modified' => '2025-03-04',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '63',
'rght' => '64'
)
),
(int) 16 => array(
'Advertisement' => array(
'id' => '58',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '20210424100013ce6e6d048914eccdc312d53e64e566b7.jpg',
'display' => '3',
'created' => '2021-04-24',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '65',
'rght' => '66'
)
),
(int) 17 => array(
'Advertisement' => array(
'id' => '59',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/geomax',
'images' => '2021051416090922e7bec3a6dfe8041780aa125f5f4932.jpg',
'display' => '3',
'created' => '2021-05-14',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '67',
'rght' => '68'
)
),
(int) 18 => array(
'Advertisement' => array(
'id' => '60',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/south',
'images' => '20210623100351b1da5960a28a9deb6af4e028880d625b.png',
'display' => '3',
'created' => '2021-06-23',
'modified' => '2021-06-23',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '69',
'rght' => '70'
)
),
(int) 19 => array(
'Advertisement' => array(
'id' => '62',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/e-survey',
'images' => '20211124221103bda9f65e28426fc1f93c4f5f223cd1bc.png',
'display' => '3',
'created' => '2021-06-23',
'modified' => '2021-11-24',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '71',
'rght' => '72'
)
),
(int) 20 => array(
'Advertisement' => array(
'id' => '68',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hi-target',
'images' => '2021112422134905fc59de564b69bfad9ca0b5f7204ffa.png',
'display' => '3',
'created' => '2021-08-05',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '73',
'rght' => '74'
)
),
(int) 21 => array(
'Advertisement' => array(
'id' => '73',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/dji',
'images' => '2021102921504774fd5e8eec5eed69455accd89f7429e5.png',
'display' => '3',
'created' => '2021-10-29',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '83',
'rght' => '84'
)
),
(int) 22 => array(
'Advertisement' => array(
'id' => '74',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/spectra-geospatial-spectra-precision',
'images' => '202110292149162a2a919ea2a12b8255429f33eb51a1a8.png',
'display' => '3',
'created' => '2021-10-29',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '85',
'rght' => '86'
)
),
(int) 23 => array(
'Advertisement' => array(
'id' => '75',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/efix',
'images' => '202207131224432d602a710c7f1a152566aec421d281d7.png',
'display' => '3',
'created' => '2022-07-13',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '87',
'rght' => '88'
)
),
(int) 24 => array(
'Advertisement' => array(
'id' => '76',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/chcnav',
'images' => '20220714162725db2138b3dcabb86eedc65c4ba1f6ccce.jpg',
'display' => '3',
'created' => '2022-07-14',
'modified' => '2022-07-27',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '89',
'rght' => '90'
)
),
(int) 25 => array(
'Advertisement' => array(
'id' => '78',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '202208051039345c0c28b21fe05a0c9d4f65b176fe7063.jpg',
'display' => '3',
'created' => '2022-08-05',
'modified' => '2022-08-05',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '93',
'rght' => '94'
)
),
(int) 26 => array(
'Advertisement' => array(
'id' => '79',
'name' => null,
'link' => 'https://tracdiathanhdat.vn/hang-khac',
'images' => '202210171541561896d0eb31d272d3d99a9a8c0d3582fa.png',
'display' => '3',
'created' => '2022-10-17',
'modified' => '2022-10-17',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '95',
'rght' => '96'
)
),
(int) 27 => array(
'Advertisement' => array(
'id' => '100',
'name' => null,
'link' => '',
'images' => '20230515143931e088ce1b8d5b9bcf57916a733e5ff5e3.jpg',
'display' => '3',
'created' => '2023-05-15',
'modified' => '2023-05-15',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '117',
'rght' => '118'
)
),
(int) 28 => array(
'Advertisement' => array(
'id' => '107',
'name' => null,
'link' => 'https://www.tracdiathanhdat.vn/bua-dung-cho-khao-sat-dia-chat-estwing-e3-22p.html',
'images' => '20240130151328303b311c40a2276c91bf7e4f0aa460ce.png',
'display' => '3',
'created' => '2024-01-30',
'modified' => '2024-01-30',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '125',
'rght' => '126'
)
),
(int) 29 => array(
'Advertisement' => array(
'id' => '108',
'name' => null,
'link' => 'https://www.tracdiathanhdat.vn/ong-nhom-celestron-nature-dx-10-42.html',
'images' => '20240130151701574ebc151c3252c2eb93d6504efdc5ab.jpg',
'display' => '3',
'created' => '2024-01-30',
'modified' => '2024-01-30',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '127',
'rght' => '128'
)
),
(int) 30 => array(
'Advertisement' => array(
'id' => '114',
'name' => null,
'link' => '',
'images' => '20250917151944a9ff8314bd4af3bf87c9037dceceff53.png',
'display' => '3',
'created' => '2025-09-17',
'modified' => '2025-09-17',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '131',
'rght' => '132'
)
)
)
$chayphai = array(
'Advertisement' => array(
'id' => '50',
'name' => null,
'link' => '',
'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg',
'display' => '2',
'created' => '2021-01-20',
'modified' => '2021-01-20',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '53',
'rght' => '54'
)
)
$chaytrai = array(
'Advertisement' => array(
'id' => '49',
'name' => null,
'link' => '',
'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg',
'display' => '1',
'created' => '2021-01-20',
'modified' => '2021-01-20',
'status' => '1',
'pos' => '0',
'content' => null,
'slug' => null,
'lft' => '51',
'rght' => '52'
)
)
$chiasekinhnghiem = array()
$list_menu_footer = array()
$danhmuc_left_parent_sphot = array(
(int) 0 => array(
'Catproduct' => array(
'id' => '2',
'name' => 'Sản phẩm',
'slug' => 'san-pham-1'
)
)
)
$danhmuc_left_parent = array(
(int) 0 => array(
'Catproduct' => array(
'id' => '2',
'name' => 'Sản phẩm',
'slug' => 'san-pham-1'
)
)
)
$danhmuc = array(
(int) 0 => array(
'Catproduct' => array(
'id' => '1',
'name' => 'Trang chủ',
'slug' => 'trang-chu'
)
),
(int) 1 => array(
'Catproduct' => array(
'id' => '3',
'name' => 'Giới thiệu ',
'slug' => 'gioi-thieu'
)
),
(int) 2 => array(
'Catproduct' => array(
'id' => '2',
'name' => 'Sản phẩm',
'slug' => 'san-pham-1'
)
),
(int) 3 => array(
'Catproduct' => array(
'id' => '5',
'name' => 'Phần mềm - HDSD ',
'slug' => 'phan-mem-hdsd'
)
),
(int) 4 => array(
'Catproduct' => array(
'id' => '40',
'name' => 'Kiến thức - Ứng dụng',
'slug' => 'kien-thuc-ung-dung'
)
),
(int) 5 => array(
'Catproduct' => array(
'id' => '6',
'name' => 'Liên hệ',
'slug' => 'lien-he'
)
)
)
$support = array(
(int) 0 => array(
'Support' => array(
'id' => '13',
'name' => 'Co so Ha noi',
'phone' => '098 987 678',
'yahoo' => 'duycuong7640',
'skype' => 'duycuong7640',
'pos' => '0',
'created' => '2013-09-13',
'modified' => '2015-05-05',
'status' => '1',
'yahoo1' => 'duycuong7640',
'skype1' => '',
'hotline' => '0987 654 999',
'email' => '',
'name1' => ''
)
),
(int) 1 => array(
'Support' => array(
'id' => '16',
'name' => 'Co so TP.HCM',
'phone' => '3252 436 432',
'yahoo' => 'duycuong7640',
'skype' => 'tuvantubep',
'pos' => '0',
'created' => '2014-01-15',
'modified' => '2015-05-05',
'status' => '1',
'yahoo1' => 'duycuong7640',
'skype1' => '',
'hotline' => '0987 654 999',
'email' => '',
'name1' => ''
)
)
)
$content_for_layout = '<style>
@font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal}
#ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative}
#ez-toc-container.selected{
width: 10px;
}
#ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"}
.toc_cap2{
padding-left: 25px!important;
}
.toc_cap3{
padding-left: 50px!important;
}
.ct-tt table.download{
width: 100%!important;
}
.ct-tt a.download{
background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase;
}
.ct-tt table.dangkythamgia{
width: 100%!important;
}
.ct-tt a.dangkythamgia{
padding:10px 20px; background-color: #00ffff;
}
.ct-tt div{max-width: 100%;}
</style>
<div class="bg-cat-danhmuc">
<div class="cat-title-danhmuc">
<a href="" title="">
<h1></h1>
</a>
</div>
</div>
<div class="box-content-detail">
<div class="clear-content"></div><div class="clear-content"></div>
<div class="col-product">
<div class="box-new-content">
<div class="box-new-detail">
<div class="time-date">
12:00:00
<span>11/09/2017</span>
</div><!--end time-date--><div class="clear-content"></div>
<div class="box-like-share">
<div class="like1">
<div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div>
</div>
</div><!--end box-like-share--><div class="clear-content"></div>
<div class="ct-tt">
<style>
#row-2097407503{display: flex;flex-wrap: wrap;}
#row-2097407503 p{
margin-bottom: 20px;
}
.large-4 {
flex-basis: 33.3333333333%;text-align: center;
max-width: 33.3333333333%;margin-bottom: 30px;
}
.large-4 a{
color: #fff;text-transform: uppercase;font-weight:bold;
}
.large-4 .col-inner{padding:0 15px;}
.expand {
display: block;
max-width: 100%!important;
padding-left: 0!important;
padding-right: 0!important;
width: 100%!important;padding:10px;
}
.button.success {
background-color: #4a90e2;
}
.box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover {
transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%);
}
.box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner {
transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s;
}
.box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover {
box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%);
}
.button span {
font-weight: 400;
}
.is-shade:after {
box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%);
}
</style>
<div class="" id="row-2097407503">
<p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p>
<div id="col-680915017" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>Gọi Điện</span>
</a>
</div>
</div>
<div id="col-569433728" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>Nhắn Tin</span>
</a>
</div>
</div>
<div id="col-272138532" class="col medium-4 small-4 large-4">
<div class="col-inner">
<a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;">
<span>chat zalo</span>
</a>
</div>
</div>
</div>
<div class="clear-main"></div>
</div><!--end ct-tt-->
<!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>-->
<div class="clear-content"></div><div class="clear-content"></div>
</div><!--end box-new-detail-->
<div class="bar-new-detail">
<label>Private same category</label>
<div class="clear-main"></div>
<ul>
<li>
<a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title="">
<h3> <span>(18-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title="">
<h3> <span>(06-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title="">
<h3> <span>(05-08-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title="">
<h3> <span>(30-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title="">
<h3> <span>(29-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title="">
<h3> <span>(28-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title="">
<h3> <span>(25-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title="">
<h3> <span>(14-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title="">
<h3> <span>(12-07-2021)</span></h3>
</a>
</li>
<li>
<a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title="">
<h3> <span>(09-07-2021)</span></h3>
</a>
</li>
</ul>
<div class="clear-main"></div>
</div><!--end bar-new-detail-->
<div class="clear-main"></div>
<div class="pagination">
<span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div>
<div class="clear-main"></div>
</div><!--end box-ctbar-->
</div>
</div>
<script type="text/javascript">
var ToC =
"<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" +
// "<div class='tile_mucluc'><span>Mục lục:</span></div>" +
"<ul class='ez-toc-list ez-toc-list-level-1'>";
var newLine, el, title, link ,id;
$(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() {
el = $(this);
title = el.text();
id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,"");
$(this).attr('id', id);
if($(this).is("h2")){
newLine =
"<li>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
if($(this).is("h3")){
newLine =
"<li class='toc_cap2'>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
if($(this).is("h4")){
newLine =
"<li class='toc_cap3'>" +
"<a href='#"+ id + "' >" +
title +
"</a>" +
"</li>";
}
ToC += newLine;
});
ToC +=
"</ul>" +
"</nav></div><div style='clear:both;'></div>";
$(".ct-tt").prepend(ToC);
$( ".ez-toc-glyphicon" ).toggle(
function() {
$('#ez-toc-container').addClass( "selected" );
$('.menu_danhmuc').hide();
}, function() {
$('#ez-toc-container').removeClass( "selected" );
$('.menu_danhmuc').show();
}
);
</script>
'
$scripts_for_layout = ''
$count = (int) 0
$price = (int) 0
$sl = (int) 0
$cap1 = array(
'Catproduct' => array(
'id' => '2',
'name' => 'Sản phẩm',
'slug' => 'san-pham-1'
)
)
$dm_c2 = array(
(int) 0 => array(
'Catproduct' => array(
'id' => '64',
'name' => 'UAV/DRONE',
'parent_id' => '2',
'alias' => 'uav-drone',
'images' => '202401081512521957a61f2ef900e93835e8f9f7aeab18.png',
'lft' => '34',
'rght' => '35',
'pos' => '0',
'status' => '1',
'title_seo' => 'UAV/ Drone, máy bay không người lái',
'meta_key' => 'UAV',
'meta_des' => 'Là công ty chuyên nhập khẩu, cung cấp máy bay không người lái UAV/ Drone chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2022-03-24',
'modified' => '2024-01-08',
'slug' => 'uav-drone',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 1 => array(
'Catproduct' => array(
'id' => '69',
'name' => 'Laser SCANNER/Layout Navigator',
'parent_id' => '2',
'alias' => 'laser-scanner-layout-navigator',
'images' => '20240108152018614d9162875c6961b48a1567b62fd41d.png',
'lft' => '36',
'rght' => '37',
'pos' => '0',
'status' => '1',
'title_seo' => 'Trắc địa Thành Đạt chuyên cung cấp và chuyển giao công nghệ các loại máy đo đạc, trắc địa phục vụ khảo sát thiết kế, xây dựng và đo vẽ bản đồ của các hãng nổi tiếng trên thế giới như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, GLUNZ, TRIMPLE, SPECTRA, GEOMAX, GARMIN,...',
'meta_key' => 'Laser scanner, Layout Navigator',
'meta_des' => 'Là công ty chuyên nhập khẩu, cung cấp máy định vị điểm chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2022-12-05',
'modified' => '2025-01-14',
'slug' => 'laser-scanner-layout-navigator',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 2 => array(
'Catproduct' => array(
'id' => '7',
'name' => 'Máy toàn đạc điện tử',
'parent_id' => '2',
'alias' => 'may-toan-dac-dien-tu',
'images' => '202401081516562d6c3e4023165b5a99515b9bf87cb41d.png',
'lft' => '4',
'rght' => '5',
'pos' => '1',
'status' => '1',
'title_seo' => 'Máy toàn đạc là gì? Báo giá & cách chọn máy toàn đạc phù hợp!',
'meta_key' => '',
'meta_des' => 'Máy toàn đạc điện tử chính hãng Leica, Topcon, Nikon – giá tốt, hỗ trợ kỹ thuật tận nơi. Tư vấn chọn máy phù hợp công trình ngay hôm nay!',
'created' => '2015-12-02',
'modified' => '2026-04-18',
'slug' => 'may-toan-dac-dien-tu',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => 'May toan dac dien tu',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => 'Máy toàn đạc điện tử là thiết bị đo đạc trắc địa quan trọng, được sử dụng phổ biến trong xây dựng, khảo sát địa hình và bố trí công trình với độ chính xác cao.
Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy toàn đạc chính hãng từ Leica, Topcon, Nikon…, hỗ trợ kỹ thuật tận nơi, phù hợp cho nhiều loại công trình từ dân dụng đến dự án lớn.',
'display' => '0',
'content_eng' => null
)
),
(int) 3 => array(
'Catproduct' => array(
'id' => '8',
'name' => 'Máy kinh vĩ điện tử',
'parent_id' => '2',
'alias' => 'may-kinh-vi-dien-tu',
'images' => '2024010815204855ce9983bd34eb588124dc84b353f5b2.png',
'lft' => '6',
'rght' => '7',
'pos' => '2',
'status' => '1',
'title_seo' => 'may kinh vi, máy kinh vĩ, máy kinh vĩ điện tử',
'meta_key' => 'Máy kinh vĩ tại Hà Nội, Máy kinh vĩ điện tử chính hãng',
'meta_des' => 'Máy kinh vĩ điện tử còn gọi là máy kinh vĩ số DT (Digital Theodolite). Máy kinh vĩ là loại dụng cụ đo lường các góc mặt bằng và góc đứng trong không gian. Chúng được dùng phổ biến trong điều tra khảo sát thực địa.
Là công ty chuyên nhập khẩu, cung cấp máy kinh vĩ các loại chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2015-12-02',
'modified' => '2024-01-08',
'slug' => 'may-kinh-vi-dien-tu',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 4 => array(
'Catproduct' => array(
'id' => '9',
'name' => 'Máy kinh vĩ quang cơ',
'parent_id' => '2',
'alias' => 'may-kinh-vi-quang-co',
'images' => '202106091707040312c4b8f08be04fc109109fba92a7b0.jpg',
'lft' => '8',
'rght' => '9',
'pos' => '3',
'status' => '1',
'title_seo' => 'may kinh vi, máy kinh vĩ',
'meta_key' => 'may kinh vi, máy kinh vĩ chính hãng tại Hà Nội',
'meta_des' => 'Máy kinh vĩ là loại dụng cụ đo lường các góc mặt bằng và góc đứng trong không gian. Chúng được dùng phổ biến trong điều tra khảo sát thực địa',
'created' => '2015-12-02',
'modified' => '2024-01-08',
'slug' => 'may-kinh-vi-quang-co',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 5 => array(
'Catproduct' => array(
'id' => '10',
'name' => 'Máy thủy bình tự động',
'parent_id' => '2',
'alias' => 'may-thuy-binh-tu-dong',
'images' => '20240108152516627905f21b5ae408516847694d6bf571.png',
'lft' => '10',
'rght' => '11',
'pos' => '4',
'status' => '1',
'title_seo' => 'Máy Thủy Bình Tự Động Pentax, Nikon, Sokkia, Leica, Topcon – Chính Hãng, Giá Tốt',
'meta_key' => '',
'meta_des' => 'Máy thủy bình tự động chính hãng Pentax, Nikon, Sokkia, Leica, Topcon, Sokkia… độ chính xác cao, phù hợp mọi công trình. Giá tốt, tư vấn chọn máy chuẩn nhu cầu.
Liên hệ Trắc Địa Thành Đạt để được hỗ trợ nhanh 24/7!',
'created' => '2015-12-02',
'modified' => '2026-04-18',
'slug' => 'may-thuy-binh-tu-dong',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => 'Máy thủy bình tự động là thiết bị đo cao độ phổ biến trong trắc địa và xây dựng, giúp xác định chênh cao với độ chính xác cao và thao tác nhanh ngoài công trường.
Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy thủy bình chính hãng từ Penatx, Nikon, Sokkia, Leica, Topcon, Sokkia… phù hợp từ công trình dân dụng đến dự án yêu cầu độ chính xác cao.
',
'display' => '0',
'content_eng' => null
)
),
(int) 6 => array(
'Catproduct' => array(
'id' => '11',
'name' => 'Máy thủy bình điện tử',
'parent_id' => '2',
'alias' => 'may-thuy-binh-dien-tu',
'images' => '20240108152655355622b7e39186c76b1c8d7c90d8d67b.png',
'lft' => '12',
'rght' => '13',
'pos' => '5',
'status' => '1',
'title_seo' => 'may thuy binh dien tu, máy thủy bình điện tử, máy thủy bình điện tử Leica, Nikon, Topcon, Sokkia, Trimple',
'meta_key' => 'may thuy binh dien tu, máy thủy bình điện tử, máy thủy bình điện tử Leica, Nikon, Topcon, Sokkia, Trimple chính hãng tại Việt Nam',
'meta_des' => 'Máy thủy bình điện tử là loại máy sử dụng tia hồng ngoại để đọc những số liệu cần đo đạc, rồi tự động tính toán theo các phép tính mà người sử dụng lựa chọn. Cuối cùng, kết quả sẽ hiển thị trên màn hình LCD. Các dữ liệu tính toán và đo đạc được lưu trữ ở bộ nhớ trong của máy. Hoặc có thể chuyển qua máy tính để xử lý các số liệu mà người sử dụng cần.
',
'created' => '2015-12-02',
'modified' => '2024-01-08',
'slug' => 'may-thuy-binh-dien-tu',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 7 => array(
'Catproduct' => array(
'id' => '16',
'name' => 'Máy thủy bình laser',
'parent_id' => '2',
'alias' => 'may-thuy-binh-laser',
'images' => '2024010815374917fb38b64f9f6f9f2d1bc004b3e3e59c.png',
'lft' => '22',
'rght' => '23',
'pos' => '6',
'status' => '1',
'title_seo' => 'Máy thủy bình laser chính hãng giá rẻ tại Hà Nội, may thuy binh laser, may laser, máy laser giá rẻ, máy laser Bosch, máy laser Leica',
'meta_key' => 'Máy thủy bình laser chính hãng giá rẻ tại Hà Nội, may thuy binh laser, may laser, máy laser giá rẻ, máy laser Bosch, máy laser Leica',
'meta_des' => 'Chuyên nhập khẩu, cung cấp máy laser chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2015-12-09',
'modified' => '2024-02-28',
'slug' => 'may-thuy-binh-laser',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 8 => array(
'Catproduct' => array(
'id' => '17',
'name' => 'Máy đo khoảng cách laser',
'parent_id' => '2',
'alias' => 'may-do-khoang-cach-laser',
'images' => '2024010815293974051a0f3faad4fe0033fe98318caed8.png',
'lft' => '24',
'rght' => '25',
'pos' => '6',
'status' => '1',
'title_seo' => 'Máy Đo Khoảng Cách Laser chính hãng giá rẻ',
'meta_key' => 'Máy Đo Khoảng Cách Laser, Máy Đo Khoảng Cách Laser chính hãng, May do khoang cach laser, May do khoang cach laser chinh hang, May do khoang cach',
'meta_des' => 'Là công ty chuyên nhập khẩu, cung cấp máy đo khoảng cách laser chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2015-12-09',
'modified' => '2024-01-08',
'slug' => 'may-do-khoang-cach-laser',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => 'May do khoang cach laser',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 9 => array(
'Catproduct' => array(
'id' => '13',
'name' => 'Máy RTK',
'parent_id' => '2',
'alias' => 'may-rtk',
'images' => '20240108152853b1305732e016ad5c534f8371d76c092b.png',
'lft' => '16',
'rght' => '17',
'pos' => '7',
'status' => '1',
'title_seo' => 'Máy GPS RTK GNSS chính hãng | Esurvey, CHCNAV, Meridian, Geomate, Leica | Trắc Địa Thành Đạt',
'meta_key' => '',
'meta_des' => 'Máy GPS RTK GNSS chính hãng Esurvey, CHCNAV, Meridian, Geomate, Leica. Độ chính xác centimet, hỗ trợ kỹ thuật 24/7, giao hàng toàn quốc. Hotline 0913 051 734.',
'created' => '2015-12-02',
'modified' => '2026-07-04',
'slug' => 'may-rtk',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => 'Máy RTK GNSS là thiết bị đo đạc trắc địa hiện đại, được sử dụng rộng rãi trong các công trình xây dựng, khảo sát địa hình và định vị chính xác cao ngoài thực địa.
Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy RTK chính hãng, hỗ trợ kỹ thuật tận nơi, phù hợp cho nhiều nhu cầu từ công trình dân dụng đến dự án lớn.',
'display' => '0',
'content_eng' => null
)
),
(int) 10 => array(
'Catproduct' => array(
'id' => '19',
'name' => 'Máy định vị GPS cầm tay',
'parent_id' => '2',
'alias' => 'may-dinh-vi-gps-cam-tay',
'images' => '20240108153154a6b2faa25954f0bdc29b481c798007e7.png',
'lft' => '26',
'rght' => '27',
'pos' => '7',
'status' => '1',
'title_seo' => 'máy định vị GPS cầm tay, may GPS cam tay, Máy GPS Garmin',
'meta_key' => 'máy định vị GPS cầm tay, may GPS cam tay, Máy GPS Garmin chính hãng',
'meta_des' => 'Chuyên nhập khẩu, cung cấp máy GPS cầm tay Garmin chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2015-12-10',
'modified' => '2024-01-08',
'slug' => 'may-dinh-vi-gps-cam-tay',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 11 => array(
'Catproduct' => array(
'id' => '14',
'name' => 'Máy thông tầng',
'parent_id' => '2',
'alias' => 'may-thong-tang',
'images' => '2024010816025097a2e124175b25dae1b26701340708c7.png',
'lft' => '18',
'rght' => '19',
'pos' => '8',
'status' => '1',
'title_seo' => 'máy thông tầng, máy chiếu đứng, may chieu dung, Foif,',
'meta_key' => 'Máy thông tầng, máy chiếu đứng, may chieu dung, Foif,',
'meta_des' => 'Chuyên cung cấp máy chiếu đứng các loại. Cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2015-12-02',
'modified' => '2024-01-19',
'slug' => 'may-thong-tang',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 12 => array(
'Catproduct' => array(
'id' => '15',
'name' => 'Máy bộ đàm',
'parent_id' => '2',
'alias' => 'may-bo-dam',
'images' => '20240108153715f990518da54698e33be2ea01d6b75f59.png',
'lft' => '20',
'rght' => '21',
'pos' => '8',
'status' => '1',
'title_seo' => 'máy bộ đàm, may bo dam, máy bộ đàm Kenwood, máy bộ đàm Motorola, may bo dam chinh hang',
'meta_key' => 'máy bộ đàm, may bo dam, máy bộ đàm Kenwood, máy bộ đàm Motorola, may bo dam chinh hang, máy bộ đàm chính hãng tại Việt Nam',
'meta_des' => 'Chuyên nhập khẩu, cung cấp máy bộ đàm chính hãng các loại, Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2015-12-02',
'modified' => '2024-01-08',
'slug' => 'may-bo-dam',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 13 => array(
'Catproduct' => array(
'id' => '51',
'name' => 'Thước đo các loại',
'parent_id' => '2',
'alias' => 'thuoc-do-cac-loai',
'images' => '202401081540347d3b76212a8ebdd03d45fc49a95a9868.png',
'lft' => '32',
'rght' => '33',
'pos' => '10',
'status' => '1',
'title_seo' => 'thước thép, thước Yamayo, thuoc thep, thước đo sâu, thuoc do sau',
'meta_key' => 'thước thép, thước Yamayo, thuoc thep, thước đo sâu, thuoc do sau chính hãng tại Việt Nam ',
'meta_des' => 'Chuyên nhập khẩu, cung cấp thước đo các loại chính hãng, Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2021-03-25',
'modified' => '2024-01-08',
'slug' => 'thuoc-do-cac-loai',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 14 => array(
'Catproduct' => array(
'id' => '50',
'name' => 'Ống nhòm - Ống nhòm đo khoảng cách',
'parent_id' => '2',
'alias' => 'ong-nhom-ong-nhom-do-khoang-cach',
'images' => '20240108154447aa6b0fa969e5b4b7e097ef929cddbc0b.png',
'lft' => '30',
'rght' => '31',
'pos' => '11',
'status' => '1',
'title_seo' => 'ống nhòm, ống nhòm đo khoảng cách, ong nhom gia re, ống nhòm chính hãng, ống nhòm golf',
'meta_key' => 'ống nhòm, ống nhòm đo khoảng cách, ong nhom gia re, ống nhòm chính hãng, ống nhòm golf chính hãng',
'meta_des' => 'Chuyên cung cấp ống nhòm, ống nhòm đo khoảng cách chính hãng giá rẻ tại Hà Nội. Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2021-03-25',
'modified' => '2024-01-08',
'slug' => 'ong-nhom-ong-nhom-do-khoang-cach',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 15 => array(
'Catproduct' => array(
'id' => '12',
'name' => 'Phụ kiện trắc địa',
'parent_id' => '2',
'alias' => 'phu-kien-trac-dia',
'images' => '2024010815484273190bae8513cd20f76eb5a6816de822.png',
'lft' => '14',
'rght' => '15',
'pos' => '12',
'status' => '1',
'title_seo' => 'phụ kiện trắc địa, phu kien trac dia, chân máy, chân máy toàn đạc, chân thủy bình, pin GPS, pin sạc RTK, pin máy toàn đạc điện tử, mia, gương sào, gường Leica, gương Topcon, gương Nikon, sào gương',
'meta_key' => 'phụ kiện trắc địa, phu kien trac dia, chân máy, chân máy toàn đạc, chân thủy bình, pin GPS, pin sạc RTK, pin máy toàn đạc điện tử, mia, gương sào, gường Leica, gương Topcon, gương Nikon, sào gương chính hãng',
'meta_des' => 'Chuyên cung cấp phụ kiện trắc địa các loại: mia, chân toàn đạc, chân thủy bình, sạc pin RTK, sạc pin máy toàn đạc, gương sào,.... Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2015-12-02',
'modified' => '2024-01-08',
'slug' => 'phu-kien-trac-dia',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => 'Equipments',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
),
(int) 16 => array(
'Catproduct' => array(
'id' => '47',
'name' => 'Sản phẩm khác',
'parent_id' => '2',
'alias' => 'san-pham-khac',
'images' => '2024010816004972262bc63fc2344d41a2a0d35c8176a7.png',
'lft' => '28',
'rght' => '29',
'pos' => '14',
'status' => '1',
'title_seo' => 'địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,..',
'meta_key' => 'địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,..',
'meta_des' => 'Chuyên cung cấp địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,.. Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ',
'created' => '2016-01-25',
'modified' => '2024-01-08',
'slug' => 'san-pham-khac',
'cate' => '4',
'link' => 'san-pham',
'name_eng' => '',
'name_tq' => '',
'type' => 'product',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
)
)
$cap2 = array(
'Catproduct' => array(
'id' => '45',
'name' => 'Dịch vụ thuê máy',
'parent_id' => '3',
'alias' => 'dich-vu-thue-may',
'images' => '',
'lft' => '42',
'rght' => '43',
'pos' => '2',
'status' => '1',
'title_seo' => '',
'meta_key' => '',
'meta_des' => '',
'created' => '2016-01-21',
'modified' => '2016-01-21',
'slug' => 'dich-vu-thue-may',
'cate' => '4',
'link' => 'gioi-thieu',
'name_eng' => '',
'name_tq' => '',
'type' => 'new',
'hot' => '0',
'content' => '',
'display' => '0',
'content_eng' => null
)
)
$dm_c3 = array()include - APP/View/Elements/menu.ctp, line 55 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::element() - CORE/Cake/View/View.php, line 424 include - APP/View/Layouts/home.ctp, line 169 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::renderLayout() - CORE/Cake/View/View.php, line 539 View::render() - CORE/Cake/View/View.php, line 483 Controller::render() - CORE/Cake/Controller/Controller.php, line 957 ProductController::chitiet() - APP/Controller/ProductController.php, line 135 ReflectionMethod::invokeArgs() - [internal], line ?? Controller::invokeAction() - CORE/Cake/Controller/Controller.php, line 485 Dispatcher::_invoke() - CORE/Cake/Routing/Dispatcher.php, line 186 Dispatcher::dispatch() - CORE/Cake/Routing/Dispatcher.php, line 161 [main] - APP/webroot/index.php, line 92
Notice (8): Undefined index: name_eng [APP/View/Elements/menu.ctp, line 56]Code Context<div class="accordion-heading"><a class="accordion-toggle" <?php if(!empty($dm_c2)){?>data-toggle="collapse" data-parent="#accordion2" href="#collapse<?php echo $cap1['Catproduct']['id'];?>" title="<?php echo $cap1['Catproduct']['name'.LANGUAGE];?>"<?php }else{?>href="<?php echo DOMAIN.$cap1['Catproduct']['slug'];?>"<?php }?>><?php echo $cap1['Catproduct']['name'.LANGUAGE];?>$viewFile = '/home/tracdiathanhda/domains/tracdiathanhdat.vn/public_html/app/View/Elements/menu.ctp' $dataForView = array( 'cat12' => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'description_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'keywords_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'title_for_layout' => 'Máy kinh vĩ', 'tinmoiup' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'tinlq' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'detailNews' => array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'setting' => array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ), 'tin_ft' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'slideshow' => array( (int) 0 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 1 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 2 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 3 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 4 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 5 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 6 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 7 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 8 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 9 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 10 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 11 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 12 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 13 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 14 => array( 'Slideshow' => array( [maximum depth reached] ) ) ), 'adv_khuyenmai' => array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ), 'doitac' => array( (int) 0 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 1 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 2 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 3 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 4 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 5 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 6 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 7 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 8 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 9 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 10 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 11 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 12 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 13 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 14 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 15 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 16 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 17 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 18 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 19 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 20 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 21 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 22 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 23 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 24 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 25 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 26 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 27 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 28 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 29 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 30 => array( 'Advertisement' => array( [maximum depth reached] ) ) ), 'chayphai' => array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ), 'chaytrai' => array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ), 'chiasekinhnghiem' => array(), 'list_menu_footer' => array(), 'danhmuc_left_parent_sphot' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc_left_parent' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'support' => array( (int) 0 => array( 'Support' => array( [maximum depth reached] ) ), (int) 1 => array( 'Support' => array( [maximum depth reached] ) ) ), 'content_for_layout' => '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ', 'scripts_for_layout' => '' ) $cat12 = array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $description_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $keywords_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $title_for_layout = 'Máy kinh vĩ' $tinmoiup = array( (int) 0 => array( 'Post' => array( 'id' => '823', 'name' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật – Những bước quan trọng để đảm bảo độ chính xác', 'code' => null, 'alias' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-–-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập trạm Base RTK đúng cách có quan trọng không? Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Thiết lập trạm Base RTK đúng cách có quan trọng không?<br /> <br /> Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.<br /> <br /> Mặc dù giao diện phần mềm của mỗi hãng có thể khác nhau, quy trình thiết lập Base nhìn chung đều tuân theo các nguyên tắc giống nhau. Dưới đây là các bước cơ bản giúp triển khai một trạm Base RTK ổn định và đáng tin cậy.</em><br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7881291487147_f174a50258d6ad97ccd34f717df81a2b.jpg" style="width: 800px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Chọn vị trí đặt Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quan trọng nhất trước khi bật máy. Một vị trí tốt nên đáp ứng các điều kiện sau:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thoáng, có góc quan sát bầu trời rộng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh cây lớn, mái che hoặc công trình cao tầng che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế đặt gần tường kính, mái tôn hoặc mặt nước để giảm hiện tượng phản xạ tín hiệu (Multipath).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh gần đường dây điện cao thế hoặc nguồn phát sóng mạnh nếu có thể.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nền đất hoặc mặt bằng ổn định, ít rung động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu đặt Base trên mốc khống chế, cần đảm bảo mốc không bị xê dịch trong suốt quá trình đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lắp chân máy và định tâm</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi chọn vị trí phù hợp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở chân máy chắc chắn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều chỉnh chiều cao thuận tiện cho việc thao tác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định tâm chính xác trên mốc bằng dọi quang học hoặc dọi laser (nếu có).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng bọt thủy theo hướng dẫn của thiết bị.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trường hợp sử dụng chân máy thông thường ngoài hiện trường, nên kiểm tra lại việc định tâm sau khi siết chặt các khóa chân máy vì quá trình thao tác có thể làm lệch vị trí ban đầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Đo chiều cao anten</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten là một thông số rất quan trọng. Thông thường, phần mềm sẽ yêu cầu người dùng nhập:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao nghiêng (Slant Height), hoặc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao đứng (Vertical Height).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần đo đúng theo phương pháp mà phần mềm yêu cầu.<br /> <br /> > Một số lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng thước chuyên dụng nếu có.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo ít nhất hai lần để kiểm tra.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại đơn vị (mét hoặc milimét).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không ước lượng bằng mắt.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc nhập sai chiều cao anten sẽ làm sai tọa độ của trạm Base và có thể ảnh hưởng đến toàn bộ dữ liệu hiệu chỉnh RTK.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Thiết lập tọa độ Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quyết định hệ quy chiếu mà Rover sẽ sử dụng. <br /> <br /> 4.1 Trường hợp 1: Base đặt trên điểm đã biết tọa độ (<strong>Known Point</strong>)<br /> <br /> Đây là phương pháp được ưu tiên. Người dùng nhập chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X, Y, H hoặc B, L, H.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ tọa độ tương ứng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi xác nhận, Base sẽ phát dữ liệu hiệu chỉnh dựa trên tọa độ đã biết.<br /> <br /> > Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ tin cậy cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với đo địa chính, khảo sát công trình, hoàn công và các công việc yêu cầu liên kết với hệ tọa độ hiện có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 4.2 Trường hợp 2: <strong>Base Here</strong> (Base tự xác định tọa độ)<br /> <br /> Nếu chưa có mốc khống chế, người dùng có thể để máy tự xác định vị trí hiện tại (Base Here hoặc Autonomous).<br /> Phương pháp này thường được sử dụng khi:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát sơ bộ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập lưới khống chế tạm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình chưa yêu cầu liên kết với hệ tọa độ chính thức.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu ý rằng tọa độ Base Here chỉ mang tính tương đối. Nếu cần liên kết với hệ tọa độ công trình hoặc VN-2000, nên đo khống chế hoặc sử dụng các phương pháp chuyển đổi phù hợp trước khi triển khai chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cấu hình truyền dữ liệu cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Base có tọa độ, cần cấu hình phương thức truyền dữ liệu hiệu chỉnh đến Rover. Hai phương thức phổ biến hiện nay là:<br /> <br /> <strong>5.1 Truyền bằng Radio UHF</strong><br /> <br /> Khi dùng phương thức này cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tần số phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Băng thông (Bandwidth).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao thức truyền (Protocol).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten UHF đã được lắp đúng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base và Rover phải sử dụng cùng cấu hình để có thể liên lạc.<br /> <br /> <strong>5.2 Truyền qua Internet (NTRIP)</strong><br /> <br /> Trong trường hợp sử dụng mạng Internet nội bộ hoặc triển khai Base riêng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra kết nối 4G/5G hoặc Wi-Fi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra địa chỉ IP hoặc Caster.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Port.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mountpoint.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tài khoản và mật khẩu nếu có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Kiểm tra trạng thái phát cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi hoàn tất cấu hình, cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base đã bắt đủ số lượng vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đã bắt đầu phát dữ liệu cải chính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không xuất hiện cảnh báo lỗi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radio hoặc Internet hoạt động ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin hoặc nguồn ngoài đủ cho thời gian làm việc.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các hệ thống Radio, nên kiểm tra thêm cường độ tín hiệu giữa Base và Rover trước khi bắt đầu đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Kiểm tra Rover đã FIX ổn định</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Rover kết nối với Base, không nên đo ngay. <br /> <br /> Nên kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm đạt FIX.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lượng vệ tinh ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PDOP ở mức phù hợp.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Age of Correction thấp và ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số RMS hoặc Estimated Precision nằm trong giới hạn cho phép của công việc.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu Rover liên tục chuyển giữa FIX và FLOAT, cần kiểm tra lại:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách đến Base.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu Radio hoặc Internet.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình truyền dữ liệu.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Một số lỗi thường gặp khi thiết lập Base</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đặt Base không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt dưới tán cây, gần nhà cao tầng hoặc gần nguồn phản xạ mạnh có thể làm giảm chất lượng quan sát GNSS.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo sai chiều cao anten</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá phổ biến và có thể ảnh hưởng đến kết quả tính toán tọa độ của trạm Base.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai tọa độ Base</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ, sai kinh tuyến trục, sai cao độ hoặc nhập nhầm tọa độ sẽ khiến Rover đo sai toàn bộ.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai cấu hình Radio</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác tần số, giao thức hoặc công suất giữa Base và Rover sẽ khiến Rover không nhận được dữ liệu hiệu chỉnh.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Di chuyển Base trong khi đang đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu chân máy bị dịch chuyển trong quá trình làm việc, toàn bộ kết quả sau thời điểm dịch chuyển đều có thể không còn đảm bảo độ tin cậy và nên được kiểm tra hoặc đo lại.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguồn điện không đủ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base mất nguồn hoặc khởi động lại giữa ca đo sẽ làm gián đoạn việc truyền dữ liệu hiệu chỉnh đến Rover.<br /> <br /> >>> Thiết lập Base RTK không chỉ là vài thao tác trên bộ điều khiển mà còn bao gồm việc lựa chọn vị trí đặt máy, định tâm chính xác, nhập đúng chiều cao anten, cấu hình tọa độ và kiểm tra trạng thái hoạt động của toàn bộ hệ thống. Thực hiện đúng các bước ngay từ đầu sẽ giúp Rover nhận dữ liệu hiệu chỉnh ổn định, giảm thời gian xử lý sự cố ngoài thực địa và nâng cao độ tin cậy của kết quả đo.<br /> <br /> Mặc dù tên gọi các chức năng hoặc giao diện có thể khác nhau giữa các hãng, nguyên tắc thiết lập trạm Base về cơ bản vẫn tương tự. Nắm vững các nguyên lý này sẽ giúp người sử dụng dễ dàng làm việc với nhiều dòng RTK khác nhau.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 260626.png" style="width: 800px; height: 533px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Liên hệ ngay <a href="https://zalo.me/0913051734"><span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt qua Zalo</strong></span></a> để được tư vấn chọn máy phù hợp nhất!</span></span><br /> <a class="zalo-float" href="https://zalo.me/0949322456" rel="noopener" target="_blank"> <span class="zalo-icon">Z</span> <span class="zalo-text">Nhắn Zalo</span> </a> <style type="text/css"> .zalo-float { position: fixed; right: 20px; bottom: 90px; z-index: 9999; display: flex; align-items: center; gap: 8px; background: #0068ff; color: #fff; padding: 12px 16px; border-radius: 999px; font-weight: 700; font-size: 15px; text-decoration: none; box-shadow: 0 8px 24px rgba(0,0,0,0.22); } .zalo-float:hover { transform: translateY(-2px); opacity: 0.95; } .zalo-icon { width: 28px; height: 28px; border-radius: 50%; background: #fff; color: #0068ff; display: flex; align-items: center; justify-content: center; font-weight: 800; } @media (max-width: 768px) { .zalo-float { right: 14px; bottom: 80px; padding: 11px 14px; font-size: 14px; } }</style> ', 'images' => '202606260951032f4d94b16f8c4b40c845fa69fd0c4dc4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật từ A đến Z', 'meta_key' => '', 'meta_des' => 'Hướng dẫn chi tiết cách thiết lập trạm Base RTK: chọn vị trí, định tâm, đo chiều cao anten, cấu hình Known Point hoặc Base Here, Radio/NTRIP và các lỗi thường gặp.', 'created' => '2026-06-26', 'modified' => '2026-07-12', 'status' => '1', 'view' => '525', 'slug' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '557', 'rght' => '558', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '822', 'name' => 'Hiểu đúng về RTCM 1021–1027, Helmert (Bursa-Wolf), 7 tham số và chuyển đổi hệ tọa độ', 'code' => null, 'alias' => 'hieu-dung-ve-rtcm-1021–1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàncầu sang hệ tọa độ làm việc tại địa phương.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàn cầu sang hệ tọa độ làm việc tại địa phương.<br /> <br /> Vậy RTK thực chất đo trong hệ nào?<br /> <br /> Máy thu GNSS không đo trực tiếp trong hệ tọa độ VN-2000. Thay vào đó, thiết bị xác định vị trí trong một hệ quy chiếu địa tâm toàn cầu (global geocentric reference frame), chẳng hạn như WGS84 hoặc các realization gần với ITRF (International Terrestrial Reference Frame).<br /> <br /> Trong khi đó, tại Việt Nam, phần lớn bản đồ địa hình, bản đồ địa chính, hồ sơ thiết kế và công trình lại sử dụng hệ tọa độ VN-2000 hoặc hệ tọa độ công trình. <br /> <br /> Vì vậy, trước khi có thể sử dụng ngoài thực địa, kết quả đo GNSS cần được chuyển đổi sang hệ tọa độ làm việc.<br /> <br /> Có thể hình dung quy trình tổng quát như sau: <strong>GNSS/RTK → WGS84 hoặc ITRF (realization cụ thể) → Chuyển đổi hệ quy chiếu và phép chiếu bản đồ (khi cần) → VN-2000 hoặc hệ tọa độ công trình.</strong><br /> <br /> <em>Lưu ý: WGS84 và ITRF đều có nhiều phiên bản (realizations) được cập nhật theo thời gian. Trong hầu hết công việc RTK thông thường, quá trình này đã được phần mềm RTK hoặc dịch vụ CORS xử lý. Tuy nhiên, với các ứng dụng yêu cầu độ chính xác cao hoặc xử lý dữ liệu nhiều thời kỳ, vẫn cần quan tâm đến reference frame và epoch của dữ liệu.</em></span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. 7 tham số là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trắc địa, một trong những mô hình phổ biến để chuyển đổi giữa hai hệ quy chiếu là phép biến đổi 7 tham số (Seven-Parameter Transformation).<br /> <br /> Bộ tham số gồm: </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔX: Tịnh tiến theo trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔY: Tịnh tiến theo trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔZ: Tịnh tiến theo trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rx: Góc quay quanh trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ry: Góc quay quanh trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rz: Góc quay quanh trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Scale: Hệ số tỷ lệ (ppm)</span></span></li> </ul> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/coordtrans datum transformation.gif" style="width: 613px; height: 407px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong đó:<br /> - Ba tham số đầu mô tả sự dịch chuyển giữa hai hệ quy chiếu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ba tham số tiếp theo mô tả sự quay.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Tham số cuối cùng mô tả sự khác biệt về tỷ lệ.</span></span></span></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình này giả thiết rằng mối quan hệ giữa hai hệ quy chiếu có thể được biểu diễn bằng một phép biến đổi gồm ba tham số tịnh tiến, ba tham số quay và một tham số tỷ lệ.<br /> <br /> Trong các phần mềm RTK, người dùng có thể gặp nhiều tên gọi như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Seven Parameters</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Helmert Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bursa-Wolf Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Datum Transformation</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư hiện trường, điều quan trọng cần nhớ là: 7 tham số là một mô hình dùng để chuyển đổi giữa hai hệ quy chiếu.<br /> <br /> Trong những khu vực có biến dạng không đồng nhất, mô hình này có thể không đạt độ chính xác cao bằng các phương pháp sử dụng lưới hiệu chỉnh (Grid Shift).<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Bursa-Wolf và Helmert có giống nhau không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là điểm khá nhiều người nhầm lẫn. Trong nhiều phần mềm RTK, hai tên gọi: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Helmert Transformation & </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Bursa-Wolf Transformation </span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">được sử dụng gần như thay thế cho nhau. <br /> <br /> Tuy nhiên, xét dưới góc độ học thuật, Bursa-Wolf là một quy ước biểu diễn của phép biến đổi Helmert 7 tham số. Sự khác biệt chủ yếu nằm ở quy ước dấu và cách biểu diễn các tham số quay. Đối với phần lớn công việc RTK ngoài thực địa, sự khác biệt này thường không ảnh hưởng đến quá trình sử dụng nếu các tham số được khai báo đúng theo quy ước mà phần mềm yêu cầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Ngoài 7 tham số còn có những phương pháp nào?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi phép chuyển đổi tọa độ đều sử dụng mô hình 7 tham số. Một số phương pháp phổ biến khác gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Molodensky–Badekas</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp này cũng sử dụng bảy tham số nhưng thực hiện phép quay quanh một điểm gốc cục bộ (origin point) thay vì tâm Trái Đất. Cách tiếp cận này thường giúp giảm ảnh hưởng của sai số quay trong các hệ tọa độ địa phương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Grid Shift</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác với mô hình 7 tham số, Grid Shift không sử dụng một bộ tham số chung cho toàn bộ khu vực mà áp dụng các giá trị hiệu chỉnh được nội suy từ lưới.<br /> <br /> Ví dụ: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">NTv2, </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Geoid Grid</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với những khu vực có biến dạng không đồng đều, Grid Shift thường cho độ chính xác cao hơn mô hình 7 tham số.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. RTCM 1021–1027 là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM (Radio Technical Commission for Maritime Services) là tiêu chuẩn quốc tế dùng để truyền dữ liệu hiệu chỉnh trong GNSS RTK. <br /> <br /> Khi nhắc đến RTCM, nhiều người chỉ nghĩ đến các bản tin phục vụ quá trình FIX. Tuy nhiên, trong tiêu chuẩn RTCM 3.x còn có nhóm bản tin 1021–1027, được định nghĩa để truyền các thông tin liên quan đến phép biến đổi datum, phép chiếu bản đồ và một số mô hình hiệu chỉnh phục vụ chuyển đổi sang hệ tọa độ địa phương.<br /> <br /> Theo tài liệu của RTCM SC-104 và một số nhà sản xuất phần mềm GNSS, nhóm bản tin này được thiết kế nhằm hỗ trợ việc chuyển đổi từ hệ quy chiếu GNSS sang hệ tọa độ địa phương. <br /> <br /> Tuy nhiên cần lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi mạng CORS đều phát các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi bộ thu GNSS hoặc phần mềm RTK đều hỗ trợ đầy đủ việc giải mã và áp dụng các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc triển khai có thể khác nhau giữa các phiên bản RTCM, nhà sản xuất thiết bị và dịch vụ CORS.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì vậy, không nên mặc định rằng mọi hệ thống CORS đều truyền hoặc sử dụng RTCM 1021–1027.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1655118093874(1).jpg" style="width: 600px; height: 450px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Vì sao có phần mềm RTK không cần nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, người dùng không cần nhập thủ công, nhưng điều đó không có nghĩa quá trình chuyển đổi không tồn tại. <br /> <br /> Việc chuyển đổi có thể đã được thực hiện thông qua:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cơ sở dữ liệu CRS tích hợp trong phần mềm hoặc bộ điều khiển;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ffile hệ tọa độ (CRS/Projection) được import;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình do nhà sản xuất thiết lập;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin từ dịch vụ CORS;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc các cơ chế chuyển đổi riêng của phần mềm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Do đó, việc không phải nhập không đồng nghĩa với không sử dụng phép chuyển đổi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Khi nào vẫn phải nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số tình huống vẫn cần người dùng thiết lập thủ công, chẳng hạn:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng Base cục bộ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Llàm việc với hệ tọa độ công trình;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng hệ tọa độ địa phương chưa có trong phần mềm;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu khảo sát cũ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc làm việc với các dự án có quy định riêng về hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, người dùng có thể phải:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập 7 tham số;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Import file hệ tọa độ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc thực hiện Site Calibration (Localization).</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. RTCM 1021–1027 có thay thế Site Calibration không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Câu trả lời là không. Hai khái niệm này phục vụ những mục đích khác nhau.<br /> <br /> RTCM 1021–1027 là nhóm bản tin dùng để truyền các thông tin liên quan đến phép chuyển đổi hệ quy chiếu và phép chiếu bản đồ. Trong khi đó, Site Calibration (Localization) là quá trình thiết lập mối quan hệ giữa hệ tọa độ GNSS và hệ tọa độ của dự án thông qua các điểm khống chế ngoài thực địa.<br /> <br /> Site Calibration không thay thế phép chuyển đổi giữa các hệ quy chiếu mà chỉ hiệu chỉnh cục bộ để phù hợp với hệ tọa độ công trình. Ngay cả khi sử dụng mạng CORS và chọn đúng hệ tọa độ, nhiều dự án vẫn yêu cầu kiểm tra trên các mốc khống chế trước khi tiến hành đo chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Những lỗi thường gặp ngoài thực địa</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Qua thực tế sử dụng RTK, một số lỗi liên quan đến hệ tọa độ thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai datum hoặc realization.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai đơn vị của Rx, Ry, Rz (độ, giây hoặc radian).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai hệ số Scale (ppm hoặc hệ số tỷ lệ).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dùng nhầm hệ tọa độ công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tin tưởng trạng thái FIX nhưng không kiểm tra trên mốc khống chế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những nguyên nhân có thể khiến tọa độ sai hàng mét, thậm chí hàng chục mét dù máy vẫn báo FIX bình thường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">9. Người sử dụng RTK cần quan tâm đến điều gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với phần lớn công việc khảo sát, địa chính, thi công hoặc hoàn công, người dùng không nhất thiết phải nhớ chi tiết từng bản tin RTCM.<br /> <br /> Điều quan trọng hơn là:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo đúng Job / Project.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng mountpoint khi dùng CORS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập đúng chiều cao anten.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại trên mốc khống chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ nhìn trạng thái FIX mà bỏ qua cấu hình hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu kết quả đo lệch toàn bộ so với bản vẽ hoặc mốc ngoài thực địa, cần kiểm tra lại hệ tọa độ trước khi nghi ngờ máy RTK hoặc tín hiệu vệ tinh.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> RTCM 1021–1027, Helmert, Bursa-Wolf, 7 tham số và Site Calibration đều liên quan đến quá trình đưa kết quả GNSS về hệ tọa độ làm việc, nhưng chúng không phải là các khái niệm tương đương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS xác định vị trí trong hệ quy chiếu toàn cầu, thường là WGS84 hoặc các realization gần với ITRF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">VN-2000 và hệ tọa độ công trình là các hệ tọa độ làm việc được sử dụng trong khảo sát, thiết kế và thi công tại Việt Nam.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7 tham số (Bursa-Wolf/Helmert) là một trong những mô hình phổ biến dùng để chuyển đổi tọa độ giữa các hệ quy chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM 1021–1027 là nhóm bản tin được thiết kế để hỗ trợ truyền thông tin liên quan đến phép biến đổi tọa độ và phép chiếu bản đồ. Tuy nhiên, việc các bản tin này có được sử dụng hay không còn phụ thuộc vào phiên bản RTCM, hệ thống CORS và phần mềm RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Site Calibration (Localization) là quá trình hiệu chỉnh cục bộ theo các điểm khống chế của dự án và không nên xem là sự thay thế cho các phép biến đổi giữa các hệ quy chiếu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư khảo sát và thi công, hiểu đúng vai trò của từng khái niệm sẽ giúp cấu hình RTK chính xác hơn, xử lý tốt các tình huống liên quan đến hệ tọa độ và hạn chế các sai lệch không đáng có ngoài thực địa.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 230626 2.png" style="width: 800px; height: 533px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;"><u><strong>Tài liệu tham khảo</strong></u></span></span><br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">RTCM Special Committee 104 – <em>RTCM Standard for Differential GNSS (Multiple Signal Messages)</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IOGP – <em>Geomatics Guidance Note 7, Coordinate Conversions and Transformations</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">EPSG Geodetic Parameter Dataset & Guidance Note 7-2.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">ISO 19111 – <em>Geographic Information — Referencing by Coordinates</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Carlson Software – <em>RTCM 1021–1027 White Paper</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Leica Geosystems – <em>Captivate Coordinate System Guide</em>.</span></span></li> </ul> ', 'images' => '20260625150050d64d8db365e7a0f663896871ecf242ce.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'RTK chuyển từ WGS84 sang VN-2000 như thế nào? Giải thích RTCM 1021–1027 và 7 tham số', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách RTK chuyển đổi từ WGS84 sang VN-2000, bản chất của RTCM 1021–1027, Bursa-Wolf Transformation, Helmert 7 tham số và vai trò của Site Calibration trong GNSS RTK.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '752', 'slug' => 'hieu-dung-ve-rtcm-1021-1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '555', 'rght' => '556', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '821', 'name' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân phổ biến và cách khắc phục!', 'code' => null, 'alias' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Với khả năng xác định tọa độ ở độ chính xác mức centimet, RTK đã trở thành công cụ gần như không thể thiếu đối với nhiều kỹ sư. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Trong điều kiện làm việc phù hợp và khi đạt trạng thái FIX, công nghệ RTK có thể cung cấp tọa độ với độ chính xác ở mức centimet. Chính vì vậy, RTK đã trở thành một trong những công cụ quan trọng đối với nhiều kỹ sư khảo sát và xây dựng. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy GPS RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.<br /> </em><br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>I. Trạng thái FIX trong RTK là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công nghệ GNSS RTK, trạng thái FIX (Fixed Solution) là khi bộ thu đã giải được số nguyên chu kỳ sóng mang (<em>Integer Ambiguity</em>). Khi đó, hệ thống có thể xác định tọa độ với độ chính xác ở mức centimet trong điều kiện làm việc phù hợp.<br /> <br /> Thông thường, máy RTK sẽ hiển thị một trong các trạng thái sau:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Single: Định vị độc lập bằng tín hiệu vệ tinh, sai số thường ở mức vài mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DGPS/SBAS: Có dữ liệu hiệu chỉnh, độ chính xác được cải thiện so với Single nhưng chưa đạt mức RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Float: Đã nhận dữ liệu cải chính nhưng chưa giải được hoàn toàn số nguyên chu kỳ sóng mang.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX: Định vị RTK với độ chính xác cao, đáp ứng phần lớn yêu cầu của công tác trắc địa.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lưu ý rằng, trạng thái FIX không đồng nghĩa với việc kết quả luôn chính xác tuyệt đối. Độ tin cậy của phép đo còn phụ thuộc vào điều kiện quan sát vệ tinh, môi trường làm việc, cấu hình hệ tọa độ và việc kiểm tra chất lượng số liệu ngoài thực địa.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 3 FIX.png" style="width: 620px; height: 566px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Không đủ vệ tinh hoặc hình học vệ tinh không thuận lợi</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để đạt được nghiệm FIX, máy RTK cần quan sát đồng thời đủ số lượng vệ tinh với sự phân bố hợp lý trên bầu trời. Máy có thể khó FIX hoặc FIX chậm khi làm việc trong các môi trường như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần nhà cao tầng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hẻm sâu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khu vực có nhiều cây lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dưới mái che hoặc trong nhà xưởng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa hình núi đá che khuất bầu trời.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài số lượng vệ tinh, chỉ số PDOP (Position Dilution of Precision) cũng ảnh hưởng đáng kể đến khả năng FIX. Dù quan sát được nhiều vệ tinh, nếu hình học vệ tinh không thuận lợi thì thời gian FIX vẫn có thể kéo dài hoặc nghiệm FIX kém ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 2 FIX.png" style="width: 600px; height: 400px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hiện tượng đa đường tín hiệu (Multipath)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đa đường tín hiệu là một trong những nguyên nhân phổ biến khiến máy RTK khó giữ FIX. Hiện tượng này xảy ra khi tín hiệu GNSS bị phản xạ qua các bề mặt như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tường kính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhà thép tiền chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xe ô tô hoặc container.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặt nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hàng rào thép.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi bộ thu nhận đồng thời tín hiệu trực tiếp và tín hiệu phản xạ, việc xác định pha sóng mang trở nên khó khăn hơn, khiến nghiệm RTK thiếu ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 5 FIX.png" style="width: 620px; height: 348px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Khoảng cách giữa Base và Rover quá lớn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong hệ thống RTK Base – Rover truyền thống, khoảng cách giữa hai máy ảnh hưởng trực tiếp đến chất lượng dữ liệu cải chính. Trong điều kiện các yếu tố khác tương đương, khoảng cách giữa Base và Rover càng lớn thì việc giải nghiệm RTK thường càng khó khăn hơn.<br /> <br /> Khi khoảng cách tăng lên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số tầng điện ly và tầng đối lưu giữa hai điểm tăng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mức độ tương quan của tín hiệu giảm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian FIX có thể lâu hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giữ FIX giảm trong điều kiện khó.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK Network sử dụng CORS (VRS, iMAX hoặc Single Base), người dùng thường không làm việc với một trạm Base duy nhất. Khả năng FIX còn phụ thuộc vào mật độ mạng CORS, thuật toán xử lý của hệ thống và điều kiện quan sát vệ tinh.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 4 FIX.png" style="width: 620px; height: 410px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Kết nối Internet hoặc dữ liệu cải chính không ổn định</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi sử dụng RTK Network thông qua NTRIP, dữ liệu RTCM phải được truyền liên tục từ máy chủ CORS đến Rover. Một số nguyên nhân thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sóng 4G/5G yếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Wi-Fi không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Server CORS bị gián đoạn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Age of Differential tăng cao.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, dữ liệu cải chính có thể bị trễ hoặc gián đoạn. Tùy từng hãng và từng dòng máy, một số thiết bị có thể duy trì nghiệm FIX trong thời gian ngắn nhờ các tính năng như RTK Hold, RTK Keep hoặc các cơ chế tương tự. Tuy nhiên, nếu việc gián đoạn kéo dài, máy thường sẽ chuyển sang FLOAT hoặc SINGLE.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Nhiễu điện từ và nhiễu vô tuyến</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS từ vệ tinh có công suất rất nhỏ khi đến mặt đất nên dễ bị ảnh hưởng bởi các nguồn nhiễu mạnh. Một số nguồn nhiễu thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạm BTS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radar.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường dây điện cao thế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy phát sóng công suất lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống radio công nghiệp.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK sử dụng Radio UHF, nhiễu vô tuyến còn có thể làm giảm chất lượng liên lạc giữa Base và Rover.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 6 FIX.png" style="width: 620px; height: 411px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Anten GNSS bị che khuất hoặc lắp đặt chưa phù hợp</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng thu tín hiệu của máy RTK phụ thuộc rất nhiều vào vị trí đặt anten. Một số tình huống có thể làm giảm chất lượng tín hiệu gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đứng quá sát tường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt gần xe ô tô.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần mái tôn hoặc kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten bị che bởi người đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cáp hoặc anten bị hư hỏng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lựa chọn vị trí đặt máy thông thoáng luôn là một trong những giải pháp đơn giản nhưng mang lại hiệu quả cao.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Điều kiện khí quyển và hoạt động không gian</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS chịu ảnh hưởng của tầng điện ly và tầng đối lưu. Trong các thời điểm như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bão từ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Kp cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động điện ly mạnh.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">khả năng FIX có thể giảm so với điều kiện bình thường. Trong đa số trường hợp, mưa nhỏ không phải là nguyên nhân chính gây mất FIX.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 1 FIX.png" style="width: 620px; height: 413px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Firmware hoặc cấu hình máy chưa phù hợp<br /> </span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các bản cập nhật firmware mới có thể:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cải thiện thuật toán RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thêm tín hiệu GNSS mới.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khắc phục các lỗi đã được nhà sản xuất ghi nhận.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng khả năng tương thích với các chuẩn RTCM.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, một số cấu hình chưa phù hợp cũng có thể ảnh hưởng đến khả năng FIX, chẳng hạn như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ bật một số hệ vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập góc cắt vệ tinh chưa hợp lý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai thông số truyền Radio giữa Base và Rover.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Người dùng nên cập nhật firmware theo khuyến nghị của nhà sản xuất và kiểm tra lại cấu hình trước khi làm việc ngoài hiện trường.</span></span><br /> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">9. Hiệu năng của từng dòng máy RTK</span></h3> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Không phải mọi bộ thu GNSS RTK đều có khả năng làm việc giống nhau. Hiệu năng của thiết bị phụ thuộc vào nhiều yếu tố như:</span></span><br /> <br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thiết kế anten GNSS.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Chip xử lý tín hiệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thuật toán RTK.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Khả năng chống đa đường.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Tốc độ xử lý dữ liệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Mức độ tối ưu của phần mềm điều khiển.</span></span></li> </ul> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Vì vậy, ngay cả khi làm việc trong cùng điều kiện hiện trường, tốc độ FIX và khả năng giữ FIX giữa các dòng máy cũng có thể khác nhau.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10. Máy vẫn FIX nhưng tọa độ bị sai</span></span></h3> <h3> </h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi thường bị nhầm với hiện tượng "không FIX". Trong nhiều trường hợp, máy vẫn báo FIX bình thường nhưng tọa độ sai đáng kể do:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai tham số chuyển đổi.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp tình huống này, cần kiểm tra lại cấu hình hệ quy chiếu trước khi nghi ngờ chất lượng tín hiệu GNSS.</span></span><br /> <p style="text-align: center;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/Esurvey.jpg" style="width: 620px; height: 324px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Làm thế nào để cải thiện khả năng FIX?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để nâng cao khả năng FIX khi đo RTK, người dùng nên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đo thông thoáng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế làm việc gần các bề mặt phản xạ mạnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra số lượng vệ tinh và chỉ số PDOP.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo kết nối Internet hoặc Radio ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi chỉ số Age of Differential.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra đúng cấu hình hệ tọa độ trước khi đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cập nhật firmware theo khuyến nghị của nhà sản xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra định kỳ anten và phụ kiện.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm trên các điểm khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ dựa vào trạng thái FIX, nên kiểm tra trên mốc khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác. <br /> <br /> >>> Máy GPS RTK không phải lúc nào cũng đạt trạng thái FIX ngay sau khi khởi động. Khả năng FIX phụ thuộc vào nhiều yếu tố như điều kiện quan sát vệ tinh, hiện tượng đa đường, chất lượng dữ liệu cải chính, kết nối Internet hoặc Radio, điều kiện khí quyển, cấu hình thiết bị và môi trường làm việc.<br /> <br /> Trong thực tế, trạng thái FIX là điều kiện cần nhưng chưa phải điều kiện đủ để khẳng định chất lượng kết quả đo. Bên cạnh việc theo dõi trạng thái FIX, người sử dụng vẫn nên kết hợp kiểm tra trên mốc khống chế, đo lặp các điểm quan trọng và đánh giá điều kiện hiện trường nhằm đảm bảo độ tin cậy của số liệu.<br /> <br /> Hiểu rõ các nguyên nhân trên sẽ giúp kỹ sư trắc địa xử lý nhanh các tình huống ngoài thực địa, lựa chọn phương án đo phù hợp và khai thác hiệu quả hơn công nghệ GNSS RTK.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/TRẮC ĐỊA THÀNH ĐẠT (Logo) (Ảnh bìa Facebook).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 300px;" /></p> <br /> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ ngay </span><a href="https://zalo.me/0949322456" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><span style="margin: 0px; padding: 0px; color: rgb(255, 102, 0);"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt qua Zalo</strong></span></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để được tư vấn chọn máy phù hợp nhất!</span>', 'images' => '20260625110358e00121db9ef2b0248aadce5ad04f0e9d.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân và cách khắc phục', 'meta_key' => '', 'meta_des' => 'Máy GPS RTK không FIX được hoặc thường xuyên chuyển giữa FIX và FLOAT? Tìm hiểu 10 nguyên nhân phổ biến như vệ tinh, CORS, Internet, Base, nhiễu tín hiệu và cách khắc phục hiệu quả.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '537', 'slug' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '553', 'rght' => '554', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '820', 'name' => 'AI trong ngành trắc địa: Công việc nào sẽ được tự động hóa trước?', 'code' => null, 'alias' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span><o:p></o:p></p> <p data-end="686" data-start="526"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang dần xuất hiện trong nhiều công đoạn của quy trình khảo sát và thành lập bản đồ.</span></span><o:p></o:p></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span></em><br /> <br /> <o:p></o:p></p> <p data-end="686" data-start="526"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, phân loại dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang giúp giảm đáng kể thời gian xử lý dữ liệu và hỗ trợ kỹ sư đưa ra quyết định nhanh hơn. Tuy nhiên, một câu hỏi được nhiều người quan tâm là: </span></span></em><em style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Công việc nào trong ngành trắc địa sẽ được AI tự động hóa trước?</strong></em></p> <p style="text-align: center;"> </p> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and BIM 2.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 450px; height: 299px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong quá trình khảo sát và thành lập bản đồ, khối lượng dữ liệu thu thập được ngày càng lớn. Một chuyến bay UAV có thể tạo ra hàng nghìn ảnh chụp.<br /> <br /> Một dự án LiDAR có thể tạo ra hàng triệu đến hàng tỷ điểm Point Cloud. <br /> <br /> Các hệ thống quan trắc hiện đại có thể ghi nhận dữ liệu liên tục 24/7.<br /> <br /> Khối lượng dữ liệu này vượt xa khả năng xử lý thủ công của con người. Đây chính là môi trường lý tưởng để AI phát huy hiệu quả. Theo nhiều nghiên cứu gần đây, AI đặc biệt phù hợp với các nhiệm vụ nhận dạng mẫu, phân loại dữ liệu, phát hiện bất thường và tự động hóa các quy trình xử lý lặp lại.</span></span><br /> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">A. AI đang được ứng dụng như thế nào trong trắc địa?</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Xử lý dữ liệu UAV và ảnh viễn thám</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lĩnh vực phát triển nhanh nhất hiện nay. AI có thể hỗ trợ:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng nhà cửa, đường giao thông và cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động phân loại lớp phủ bề mặt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện thay đổi địa hình qua nhiều thời điểm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thành lập bản đồ hiện trạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều nghiên cứu đã chứng minh AI có khả năng tự động nhận dạng và trích xuất đối tượng từ ảnh UAV với độ chính xác cao, giúp giảm đáng kể khối lượng công việc số hóa thủ công.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and UAV.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Xử lý Point Cloud và LiDAR</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong các dự án quét laser mặt đất hoặc UAV LiDAR, việc phân loại Point Cloud thường tiêu tốn rất nhiều thời gian.<br /> AI hiện có thể:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tách điểm mặt đất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng công trình xây dựng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo mô hình 3D bán tự động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số hệ thống hiện nay còn có khả năng xử lý dữ liệu LiDAR gần như theo thời gian thực và tự động phân loại địa vật với mức can thiệp thủ công rất thấp.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and Lidar.jpg" style="width: 500px; height: 333px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Thành lập và cập nhật bản đồ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong lĩnh vực GIS và bản đồ, AI đang được ứng dụng để:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động số hóa đối tượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất ranh giới địa vật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lỗi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện các bất thường về hình học và thuộc tính.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các nghiên cứu về bản đồ địa chính và bản đồ nền cho thấy AI có tiềm năng rút ngắn đáng kể thời gian thành lập và cập nhật dữ liệu bản đồ.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and Mapping(1).jpg" style="width: 600px; height: 300px;" /></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Quan trắc công trình và giám sát biến dạng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các công trình cầu, đập, nhà cao tầng hoặc mỏ khai thác, dữ liệu quan trắc thường được thu thập liên tục trong thời gian dài AI có thể giúp:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện số liệu bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi xu hướng chuyển vị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự báo nguy cơ lún hoặc nghiêng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ cảnh báo sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây được xem là một trong những hướng ứng dụng có tiềm năng lớn vì AI rất giỏi trong việc phát hiện các quy luật ẩn trong tập dữ liệu dài hạn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and monitoring.jpg" style="width: 600px; height: 335px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Công việc văn phòng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu phải lựa chọn một nhóm công việc có khả năng được AI tự động hóa trước trong ngành trắc địa, thì đó có lẽ là các công việc văn phòng mang tính lặp lại và xử lý dữ liệu. Các công việc như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu giữa các định dạng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tổng hợp số liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra các lỗi dữ liệu đơn giản.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu, bảng biểu và báo cáo kỹ thuật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất thông tin từ nhật ký hoặc sổ đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại và sắp xếp dữ liệu dự án.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những công việc có quy trình tương đối rõ ràng và ít phụ thuộc vào đánh giá chuyên môn của kỹ sư. Trên thực tế, nhiều phần mềm hiện nay đã bắt đầu tích hợp các tính năng tự động hóa dạng này. AI chỉ đang giúp các quy trình đó trở nên thông minh và hiệu quả hơn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ai and office.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">B. Công việc nào khó bị AI thay thế?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực tế hiện nay, đây có lẽ là nhóm ứng dụng AI gần gũi nhất với nhiều kỹ sư trắc địa. Thay vì mất hàng giờ để viết các công cụ Excel, Python hoặc VBA, nhiều kỹ sư đã bắt đầu sử dụng AI để hỗ trợ:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Viết chương trình chuyển đổi tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán stakeout tim tuyến, cọc khoan nhồi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra dữ liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển ảnh sổ đo thành bảng tính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu nghiệm thu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Soạn thảo báo cáo kỹ thuật.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AI không thực hiện thay công việc chuyên môn, nhưng có thể giúp rút ngắn đáng kể thời gian xử lý các công việc lặp lại.<br /> <br /> >>> Nếu GNSS giúp người làm trắc địa đo nhanh hơn, UAV giúp thu thập dữ liệu nhanh hơn thì AI có thể giúp xử lý dữ liệu nhanh hơn.</span></span> <p data-end="2115" data-start="1963"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong tương lai gần, lợi thế có thể không nằm ở việc ai sử dụng AI hay không, mà nằm ở việc ai biết khai thác AI hiệu quả hơn trong công việc hàng ngày. </span></span><br /> <br /> <strong><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="text-align: justify; margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span></strong></p> ', 'images' => '20260617172058d2979529aed88d220bef4d1f33c5f441.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'AI trong trắc địa: Công việc nào sẽ được tự động hóa trước?', 'meta_key' => '', 'meta_des' => 'AI đang được ứng dụng ngày càng nhiều trong ngành trắc địa, từ xử lý UAV, LiDAR, bản đồ đến lập báo cáo kỹ thuật. Vậy công việc nào sẽ được AI tự động hóa trước? Tìm hiểu trong bài viết này.', 'created' => '2026-06-17', 'modified' => '2026-07-11', 'status' => '1', 'view' => '670', 'slug' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '551', 'rght' => '552', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '819', 'name' => 'BIM và LiDAR đang dùng những định dạng dữ liệu nào? Giải thích IFC, RVT, NWD, LAS, LAZ từ A-Z', 'code' => null, 'alias' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.</span></span><br /> ', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.<br /> <br /> Vậy các định dạng này dùng để làm gì và khác nhau như thế nào?</em></span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Nhóm dữ liệu BIM</span></span></h2> <br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 IFC (Industry Foundation Classes)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC là định dạng trao đổi dữ liệu BIM mở được phát triển bởi buildingSMART. Mục đích chính của IFC là cho phép các phần mềm BIM khác nhau trao đổi mô hình với nhau mà không phụ thuộc vào một hãng phần mềm cụ thể.</span></span><br /> <br /> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>- Ưu điểm:</strong> Không phụ thuộc vào một nhà cung cấp phần mềm cụ thể, hỗ trợ phối hợp giữa nhiều bộ môn và phù hợp cho việc bàn giao, lưu trữ dữ liệu dự án trong thời gian dài.</span></span><br /> <br /> <o:p></o:p></p> <p data-end="608" data-start="295"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="307" data-start="295">- Hạn chế:</strong> Không phải phần mềm BIM nào cũng hỗ trợ đầy đủ mọi tính năng của IFC. Trong một số trường hợp, các tham số đối tượng, Family phức tạp hoặc dữ liệu chuyên biệt có thể bị mất hoặc thay đổi khi chuyển đổi. Ngoài ra, khả năng tương thích còn phụ thuộc vào phiên bản IFC sử dụng (IFC2x3, IFC4, IFC4.3...).</span></span><br /> <br /> <o:p></o:p></p> <p data-end="858" data-start="613"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="634" data-start="613">- Ứng dụng thực tế:</strong> IFC thường được sử dụng để trao đổi dữ liệu giữa các bộ môn, bàn giao mô hình BIM cho chủ đầu tư và lưu trữ dữ liệu dự án theo định dạng mở (vendor-neutral), giúp giảm sự phụ thuộc vào một phần mềm hoặc nhà cung cấp cụ thể.</span></span><o:p></o:p></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Autodesk Revit, Tekla Structures, Archicad, Bentley OpenBuildings đều có thể xuất hoặc nhập file IFC nên IFC thường được xem là "ngôn ngữ chung" của BIM.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 BCF (BIM Collaboration Format)</span></span></h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">BCF được sử dụng để trao đổi các vấn đề (Issue), bình luận (Comment), góc nhìn (Viewpoint) và vị trí cần xử lý trong mô hình BIM. BCF không chứa mô hình 3D mà chỉ lưu thông tin phục vụ quá trình phối hợp giữa các bên.</span> <p> <br /> <strong data-end="337" data-start="325" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Dung lượng nhỏ, dễ chia sẻ và tích hợp với nhiều nền tảng BIM như Autodesk Construction Cloud (BIM 360), Solibri, Tekla BIMsight và các hệ thống quản lý Issue khác. BCF đặc biệt hữu ích trong các cuộc họp phối hợp (Coordination Meeting), kiểm tra va chạm (Clash Detection) và quy trình QA/QC.</span></p> <p data-end="630" data-start="325"> <br /> <strong data-end="653" data-start="635" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Lưu ý thực tế:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> BCF thường được sử dụng kèm với các file mô hình như IFC, RVT hoặc NWD để người dùng có thể xem đầy đủ bối cảnh của vấn đề. Một ưu điểm quan trọng của BCF là khả năng theo dõi lịch sử xử lý (Traceability), giúp liên kết giữa vấn đề được phát hiện, người phụ trách và các thay đổi được thực hiện trong dự án.</span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 RVT</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RVT là định dạng dự án của Autodesk Revit. Một file RVT có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiến trúc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống MEP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số vật liệu</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng BIM được sử dụng rất phổ biến hiện nay.</span></span><br /> <br /> <p data-end="355" data-start="108"> <strong data-end="372" data-start="360" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Lưu giữ đầy đủ tham số đối tượng, lịch sử làm việc, Worksharing và các thông tin thiết kế chi tiết. RVT là định dạng mang lại khả năng làm việc đầy đủ nhất trong môi trường Revit.</span></p> <p data-end="552" data-start="360"> </p> <p data-end="808" data-start="557"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="569" data-start="557">Hạn chế:</strong> RVT là định dạng độc quyền (proprietary) của Autodesk. Các phần mềm BIM khác thường không thể đọc hoặc khai thác đầy đủ toàn bộ thông tin trong file RVT. Vì vậy, khi cần phối hợp đa nền tảng, người dùng thường phải xuất sang IFC hoặc NWD.</span></span><br /> </p> <p data-end="1161" data-start="813"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="831" data-start="813">Lưu ý thực tế:</strong> RVT thường được sử dụng trong nội bộ đơn vị thiết kế hoặc giữa các bên cùng sử dụng Revit. Khi cần trao đổi dữ liệu với chủ đầu tư, nhà thầu hoặc các đơn vị sử dụng phần mềm khác, IFC thường là lựa chọn phổ biến để bàn giao mô hình BIM, trong khi NWD thường được sử dụng cho công tác phối hợp và kiểm tra mô hình trên Navisworks.</span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 RFA</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA là định dạng Family của Revit. Family có thể hiểu là thư viện các đối tượng BIM như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa sổ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị điện</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị cơ điện</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA tương tự như Block trong AutoCAD nhưng có nhiều thông tin tham số hơn.<br /> <br /> <strong>Ưu điểm</strong>: RFA cho phép mô tả đối tượng bằng các tham số chi tiết như kích thước, vật liệu, mã thiết bị và thông tin kỹ thuật. Nhờ đó, các đối tượng có thể dễ dàng tái sử dụng giữa nhiều dự án khác nhau, đồng thời giúp chuẩn hóa dữ liệu BIM trong doanh nghiệp.<br /> <br /> <strong>Hạn chế</strong>: RFA là định dạng riêng của Revit nên chủ yếu hoạt động trong hệ sinh thái Autodesk. Khi xuất sang IFC, các Family phức tạp có thể bị đơn giản hóa hoặc mất một phần tham số do sự khác biệt giữa các chuẩn dữ liệu BIM.<br /> <br /> <strong>Lưu ý</strong>: Nên tiêu chuẩn hóa thư viện Family trước khi triển khai dự án hoặc bàn giao dữ liệu. Đối với các Family quan trọng, cần quản lý phiên bản (Version Control) và tài liệu hóa các tham số chính để đảm bảo tính nhất quán giữa các bộ môn và các giai đoạn của dự án.</span></span><br /> <br /> <h3> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.5 RTE</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTE là định dạng Template của Revit. Đây là file mẫu được sử dụng khi khởi tạo dự án mới nhằm đảm bảo tiêu chuẩn hóa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Family</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy ước đặt tên</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số dự án</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/BIM 2(1).jpg" style="width: 662px; height: 463px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Nhóm dữ liệu Navisworks</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 NWD</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD là định dạng mô hình tổng hợp của Autodesk Navisworks. File NWD có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều mô hình BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Clash Detection</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Markup</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu phối hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng thường được sử dụng trong các cuộc họp BIM hoặc bàn giao mô hình.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 NWC</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWC là định dạng trung gian của Navisworks. File NWC thường nhẹ hơn NWD và được sử dụng để tăng tốc quá trình nạp mô hình.<br /> Nhiều dự án BIM sử dụng NWC làm định dạng trao đổi nội bộ giữa các bộ môn.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.3 NWV</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWV là định dạng Viewpoint của Navisworks. Nó lưu các thông tin về:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái hiển thị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thiết lập quan sát mô hình</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với NWD hoặc NWC, NWV ít được sử dụng hơn.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Navisworks.jpg" style="width: 680px; height: 392px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Nhóm dữ liệu Point Cloud</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 LAS (LASer File Format)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS là định dạng tiêu chuẩn lưu trữ dữ liệu Point Cloud từ công nghệ LiDAR. Mỗi điểm trong file LAS có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Intensity</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GPS Time</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Classification</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Màu RGB</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS thường được tạo ra từ: UAV LiDAR; Mobile Mapping; SLAM Scanner; Máy quét laser mặt đất (TLS); LiDAR hàng không. Một file LAS có thể chứa từ hàng triệu đến hàng trăm triệu điểm.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 LAZ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAZ là phiên bản nén của LAS. Tương tự như DXF, DWG; ZIP và thư mục dữ liệu. <br /> <br /> LAZ giúp giảm đáng kể dung lượng lưu trữ nhưng vẫn giữ nguyên thông tin Point Cloud. Hiện nay phần lớn các dự án LiDAR đều sử dụng LAZ để tối ưu dung lượng và tốc độ truyền dữ liệu.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lidar format.jpg" style="width: 565px; height: 353px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. So sánh nhanh các nhóm dữ liệu</span></span></h2> <br /> <table border="1" cellpadding="0" cellspacing="3" style="width: 100%"> <tbody> <tr> <td style="width: 128px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nhóm dữ liệu</strong></span></span></td> <td style="width: 160px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Định dạng phổ biến</strong></span></span></td> <td style="width: 212px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Mục đích</strong></span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ điểm</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý điểm đo, stakeout</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CAD</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF, DWG</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Bản vẽ kỹ thuật 2D/3D</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">BIM</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC, RVT, RFA, RTE, BCF</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình công trình số</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Navisworks</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD, NWC, NWV</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Phối hợp và kiểm tra mô hình</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Cloud</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS, LAZ</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu quét laser và LiDAR</span></span></td> </tr> </tbody> </table> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Sự phát triển của BIM, UAV LiDAR và công nghệ quét laser 3D đang làm thay đổi cách dữ liệu được tạo ra và sử dụng trong ngành xây dựng.<br /> <br /> Nếu CSV và DXF vẫn là những định dạng quen thuộc đối với kỹ sư đo đạc thì IFC, RVT, NWD hay LAS đang trở thành những định dạng ngày càng phổ biến trong các dự án hiện đại.<br /> <br /> Việc hiểu được chức năng của từng loại dữ liệu sẽ giúp kỹ sư lựa chọn đúng định dạng, trao đổi thông tin hiệu quả hơn và tránh nhiều sai sót trong quá trình triển khai dự án.</span></span><br /> <br /> <h2 data-end="2546" data-start="2275" id="lien-he-trac-dia-thanh-dat-de-duoc-tu-van-giai-phap-phu-hop-voi-tung-loai-cong-trinh" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span><br /> <br /> <span style="display: none;"> </span><span style="display: none;"> </span><img alt="" src="/admin/webroot/upload/image/images/bim 5.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; color: rgb(34, 34, 34); width: 678px; height: 452px;" /><span style="display: none;"> </span><span style="display: none;"> </span></h2> <p> </p> ', 'images' => '2026061315274748a34b386d28d2887f07eb97a60c9540.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Ngoài CSV và DXF: Tìm hiểu các định dạng IFC, RVT, NWD, LAS trong BIM và quét laser 3D', 'meta_key' => '', 'meta_des' => 'iFC, RVT, NWD, LAS, LAZ là gì? Tìm hiểu các định dạng dữ liệu BIM, Navisworks và Point Cloud phổ biến trong xây dựng, đo đạc, UAV LiDAR và quét laser 3D.', 'created' => '2026-06-13', 'modified' => '2026-07-12', 'status' => '1', 'view' => '810', 'slug' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '549', 'rght' => '550', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '818', 'name' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'code' => null, 'alias' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></p> <p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></em></p> <p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></em></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Từ cuộc đua vệ tinh đến cuộc đua trải nghiệm ngoài thực địa</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng 10 năm trước, khi một hãng giới thiệu thế hệ máy GNSS RTK mới, những thông số thường được nhắc đến nhiều nhất là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi được bao nhiêu kênh vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ những hệ thống GNSS nào.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX nhanh hơn bao nhiêu giây.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao hơn bao nhiêu milimet.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời điểm đó, đây thực sự là những yếu tố tạo nên sự khác biệt giữa các sản phẩm trên thị trường. Các hãng liên tục nâng số lượng kênh từ vài trăm lên hàng nghìn kênh. Những hệ thống mới như Galileo, BeiDou hay QZSS lần lượt được bổ sung. Công nghệ xử lý tín hiệu cũng ngày càng hoàn thiện.<br /> <br /> Tuy nhiên, khi nhìn vào thị trường hiện nay, có thể thấy cuộc đua đó đang dần thay đổi. Hầu hết các dòng RTK hiện đại đều đã hỗ trợ đa hệ vệ tinh, đa tần số và có khả năng đạt độ chính xác centimet trong điều kiện làm việc bình thường. Khi khoảng cách công nghệ về phần cứng GNSS ngày càng thu hẹp, các hãng bắt đầu tìm kiếm một hướng đi mới - Đó là nâng cao trải nghiệm làm việc ngoài thực địa.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Điều mà kỹ sư đo đạc thực sự quan tâm là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với người sử dụng máy RTK ngoài công trường, câu hỏi quan trọng nhất thường không phải: "Máy này theo dõi được bao nhiêu vệ tinh?" mà là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi hoàn thành công việc nhanh hơn không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi đo được những vị trí khó không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm được thời gian đi lại ngoài hiện trường không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm số lượng thiết bị phải mang theo không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp công việc an toàn hơn không?</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây chính là lý do nhiều công nghệ mới xuất hiện trong vài năm gần đây.<br /> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. IMU – Bước thay đổi đầu tiên</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một trong những cải tiến có ảnh hưởng lớn nhất là công nghệ IMU. Trước đây, việc giữ sào GNSS thẳng đứng gần như là yêu cầu bắt buộc.<br /> Những vị trí như: chân tường, góc công trình, mép hàng rào hay khu vực cây cối thường gây khó khăn cho người đo. Nhưng IMU đã thay đổi hoàn toàn cách làm việc này. Người sử dụng có thể nghiêng sào trong một phạm vi nhất định mà vẫn duy trì được độ chính xác cao.<br /> <br /> Ngày nay, bù nghiêng gần như đã trở thành tính năng tiêu chuẩn trên các dòng RTK mới.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (1).png" style="width: 680px; height: 383px;" /></span></span></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Camera – Khi RTK bắt đầu "nhìn thấy" hiện trường</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau IMU, các hãng tiếp tục đưa camera lên Rover GNSS. Ban đầu, nhiều người cho rằng đây chỉ là một tính năng mang tính trình diễn công nghệ.<br /> Tuy nhiên, thực tế camera đã mở ra nhiều ứng dụng mới:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhận hiện trạng công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo điểm từ ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout bằng thực tế tăng cường (AR).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại dữ liệu sau khi khảo sát.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này giúp RTK không chỉ cung cấp tọa độ mà còn lưu giữ được bối cảnh thực tế của hiện trường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (2).png" style="width: 680px; height: 678px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Laser Survey – Xu hướng đáng chú ý nhất hiện nay</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu IMU giúp người dùng đo nghiêng và camera giúp ghi nhận hình ảnh, thì Laser Survey đang hướng tới một mục tiêu khác. Đó là đo được những vị trí mà trước đây Rover GNSS khó hoặc không thể tiếp cận.<br /> Hãy hình dung một số tình huống quen thuộc mà anh em có thể gặp khi trực tiếp đo ngoài công trình: <br /> - Mép taluy cao.<br /> - Hồ điều hòa.<br /> - Bờ kênh.<br /> - Hố đào sâu.<br /> - Mái nhà.<br /> - Tường chắn.<br /> - Khu vực đang thi công nguy hiểm.<br /> <br /> Với RTK truyền thống, muốn lấy tọa độ chính xác, người đo thường phải đưa sào đến tận vị trí cần đo. Điều này không phải lúc nào cũng thuận lợi hoặc an toàn. Laser Survey ra đời để giải quyết vấn đề đó. Thay vì đưa anten GNSS đến điểm đo, người sử dụng chỉ cần hướng tia laser đến mục tiêu. Phần mềm sẽ kết hợp dữ liệu từ GNSS, IMU và laser để tính toán tọa độ của điểm cần khảo sát.</span></span><br /> <p data-end="1209" data-start="1006"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tất nhiên, việc đo các vị trí khó tiếp cận bằng tia laser không phải là điều hoàn toàn mới trong ngành đo đạc. Máy toàn đạc điện tử đã sử dụng công nghệ đo không gương (Reflectorless) từ nhiều năm trước. Điểm khác biệt là Laser Survey đang đưa khả năng này lên nền tảng Rover GNSS, cho phép người dùng vừa khai thác ưu thế định vị vệ tinh ngoài hiện trường, vừa thực hiện các phép đo từ xa trong những tình huống mà trước đây thường phải kết hợp thêm máy toàn đạc hoặc các thiết bị khác.</span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lý do nhiều chuyên gia nhận định rằng Laser Survey có thể là một trong những bước phát triển đáng chú ý nhất của Rover GNSS trong những năm gần đây.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/i85-gnss-imu-dual-cameras-laser-land-surveying.jpg" style="width: 472px; height: 354px;" /></span></span></p> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>6. Vì sao các hãng TQ đầu tư mạnh vào hướng đi này?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một lý do quan trọng là thị trường đã thay đổi. Trước đây, người mua thường so sánh:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu kênh vệ tinh?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu tần số?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác bao nhiêu milimet?</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngày nay, người dùng bắt đầu quan tâm nhiều hơn đến các yếu tố như:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Năng suất làm việc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trải nghiệm sử dụng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính linh hoạt ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giải quyết các tình huống thực tế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này khiến các hãng phải chuyển hướng nghiên cứu: không chỉ phát triển bộ thu GNSS tốt hơn, mà còn phải tìm cách giúp người dùng làm việc hiệu quả hơn.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>7. RTK đang dần trở thành nền tảng tích hợp cảm biến</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu quan sát sự phát triển của các thế hệ RTK gần đây, có thể thấy một xu hướng rất rõ. RTK không còn đơn thuần là thiết bị thu tín hiệu vệ tinh mà nó đang trở thành một nền tảng tích hợp nhiều cảm biến:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IMU.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Laser.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công nghệ xử lý hình ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thuật toán tự động hóa và trí tuệ nhân tạo (AI).</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi công nghệ đều nhằm giải quyết một khó khăn cụ thể ngoài công trường.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image(1).png" style="width: 680px; height: 680px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Có thể nói, khi khả năng thu tín hiệu GNSS giữa các thế hệ thiết bị ngày càng tiệm cận nhau, cuộc cạnh tranh của các hãng đang dần chuyển sang một hướng mới: giúp kỹ sư hoàn thành công việc nhanh hơn, an toàn hơn và thuận tiện hơn ngoài thực địa.</span></span> <p data-end="2546" data-start="2275"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera, IMU và Laser Survey có thể chỉ là những bước khởi đầu cho xu hướng đó. Trong tương lai, GNSS RTK nhiều khả năng sẽ không chỉ là thiết bị định vị vệ tinh, mà sẽ trở thành một nền tảng tích hợp nhiều cảm biến phục vụ công tác khảo sát và thi công ngoài hiện trường. </span></span><br /> </p> <h2 data-end="2546" data-start="2275"> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt </strong></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">để được tư vấn và hỗ trợ tốt nhất!</span></h2> ', 'images' => '2026061214390046f6215956d7c46255d00263c715c9d4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng Trung Quốc chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'meta_key' => '', 'meta_des' => 'Khám phá xu hướng phát triển mới của các hãng GNSS RTK như CHCNAV, eSurvey và nhiều thương hiệu khác. Từ IMU, Camera đến Laser Survey, cuộc đua công nghệ đang chuyển từ phần cứng GNSS sang nâng cao trải nghiệm làm việc ngoài thực địa.', 'created' => '2026-06-12', 'modified' => '2026-07-11', 'status' => '1', 'view' => '778', 'slug' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '547', 'rght' => '548', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '817', 'name' => 'Định dạng file RTK: Hướng dẫn xuất, nhập và xử lý lỗi thường gặp trong đo đạc', 'code' => null, 'alias' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.</span></span>', 'content' => '<p> <em><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong thực tế, công việc đo đạc không kết thúc khi Rover báo FIX hoặc khi hoàn thành việc thu thập tọa độ ngoài hiện trường. Sau bước đo đạc, dữ liệu thường phải trải qua nhiều công đoạn như:</span></em><br /> </p> <ul> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển về văn phòng.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biên tập trên AutoCAD hoặc CASS.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý trên Civil 3D, Trimble Business Center (TBC), Leica Infinity.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra trên Google Earth.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển giao cho chủ đầu tư hoặc đơn vị thiết kế.</span></span></em></li> </ul> <br /> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ cần xuất sai định dạng hoặc thiếu dữ liệu, toàn bộ quy trình phía sau có thể bị gián đoạn. Theo tài liệu của Trimble Business Center, hệ sinh thái khảo sát hiện nay hỗ trợ rất nhiều định dạng khác nhau như CSV, TXT, DXF, DWG, KML, SHP, XML, JOB, RINEX... phục vụ các mục đích sử dụng khác nhau.<br /> </span></span></em> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/61sq3Qk7zvL.jpg" style="width: 600px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Các định dạng file dữ liệu phổ biến ở máy RTK</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 CSV (*.csv)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV (Comma Separated Values) là định dạng được sử dụng nhiều nhất trong công tác đo đạc hiện nay. Thông thường file CSV có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số hiệu điểm (Point ID)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Code</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi chú</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ: </strong></u> Point,X,Y,H,Code<br /> P1,234567.123,1234567.456,15.234,COTDIEN</em><br /> <br /> <u><strong>Ưu điểm</strong></u></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở được bằng Excel.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dung lượng nhỏ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ gửi Email, Zalo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ nhập vào Civil 3D, AutoCAD, QGIS, TBC.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><u><strong>Nhược điểm</strong></u></span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có tiêu chuẩn cấu trúc thống nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hai file CSV có thể chứa các trường dữ liệu khác nhau.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Leica Captivate và CHCNAV LandStar, người dùng có thể tự định nghĩa cấu trúc CSV xuất ra bằng cách thêm hoặc bớt các trường dữ liệu cần thiết.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên.png" style="width: 480px; height: 480px;" /> </span></span></p> <p style="text-align: center;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ví dụ về File tọa độ mốc</span></span></em></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 TXT (*.txt)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">TXT là file dữ liệu dạng văn bản thuần và thường được sử dụng khi:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển dữ liệu giữa các phần mềm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập dữ liệu stakeout.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉnh sửa thủ công bằng Notepad hoặc Notepad++.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ưu điểm lớn nhất là khả năng tùy biến cấu trúc dữ liệu.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 DAT (*.dat)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT là định dạng quen thuộc với nhiều đơn vị thành lập bản đồ địa hình với nhiều ứng dụng như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CASS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập bản đồ địa hình.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại Việt Nam, DAT vẫn là định dạng được sử dụng rất nhiều trong công tác đo vẽ địa hình.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 DXF (*.dxf)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF là định dạng trao đổi dữ liệu CAD. Theo Leica Captivate, DXF được sử dụng để chuyển trực tiếp điểm, đường, layer và các đối tượng CAD giữa hiện trường và văn phòng.<br /> <br /> <strong><u>Ưu điểm</u></strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở trực tiếp trên AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không cần nhập tọa độ thủ công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giữ được nhiều thông tin bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5 KML (*.kml)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML là định dạng của Google Earth với nhiều ứng dụng như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra vị trí điểm ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối chiếu dữ liệu khảo sát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ nhanh vị trí công trình.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Trimble, KML/KMZ là một trong những định dạng phổ biến để trao đổi dữ liệu tọa độ địa lý 3D.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.6 SHP (*.shp)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP (Shapefile) là định dạng GIS được sử dụng trong:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">QGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ArcGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống quản lý dữ liệu không gian.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica Captivate còn cho phép xuất thêm các trường chất lượng điểm đo và thông tin tọa độ vào Shapefile.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7 XLS / XLSX</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số phần mềm cho phép xuất trực tiếp sang Excel với ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ chỉnh sửa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ lập bảng tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp cho hồ sơ hoàn công.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Khi nào nên chọn CSV, DAT, DXF hay SHP?</span></span></h2> <br /> <table border="0" cellpadding="0" style="width: 100%"> <tbody> <tr> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mục đích</span></span></strong><br /> </td> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng khuyến nghị</span></span></strong><br /> </td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gửi tọa độ cho chủ đầu tư</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, XLSX</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập AutoCAD</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT, DXF</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập Civil 3D</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Google Earth</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GIS</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout công trình</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ dữ liệu nhanh</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV</span></span></td> </tr> </tbody> </table> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/c64e8674de5294e51c9bd4133e27d964aede72fb_2_1024x516.png" style="width: 600px; height: 302px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Hướng dẫn xuất dữ liệu trên máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù giao diện giữa Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay Matesurvey (Geomate) có khác nhau nhưng quy trình cơ bản tương đối giống nhau với các bước như sau:<br /> <br /> - <strong>Bước 1</strong>: Mở Project hoặc Job cần xuất.<br /> <br /> - <strong>Bước 2</strong>: Kiểm tra danh sách điểm đã lưu.<br /> <br /> - <strong>Bước 3</strong>:Chọn Export Data.<br /> <br /> - <strong>Bước 4</strong>: Chọn định dạng: <em>CSV; ;TXT; DAT; DXF; KML ; SHP</em><br /> <br /> - <strong>Bước 5</strong>: Kiểm tra cấu trúc dữ liệu xuất. Một số phần mềm cho phép tùy chỉnh:<br /> <em>Point ID<br /> Easting<br /> Northing<br /> Elevation<br /> Code<br /> Rod Height<br /> Antenna Height<br /> PDOP<br /> Trạng thái FIX/FLOAT</em><br /> <br /> - <strong>Bước 6</strong>: Lưu file và kiểm tra lại trước khi gửi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Hướng dẫn nhập dữ liệu vào máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài việc xuất dữ liệu từ máy RTK, nhu cầu nhập dữ liệu vào máy để phục vụ công tác bố trí công trình (Stake Out), dẫn đường hoặc kiểm tra tọa độ cũng rất phổ biến. Hiện nay hầu hết các phần mềm đo đạc như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey), MateSurvey (Geomate) đều hỗ trợ nhập các định dạng phổ biến như:CSV (*.csv); TXT (*.txt); DXF (*.dxf). Trong đó CSV là định dạng được sử dụng nhiều nhất.<br /> <br /> <strong>- Bước 1: </strong>Chuẩn bị File dữ liệu<br /> Xuất dữ liệu từ:AutoCAD; Civil 3D; Excel; QGIS; TBC; Leica Infinityvề định dạng CSV hoặc TXT.<br /> <br /> <strong>- Bước 2: </strong>Chép File vào sổ tay<br /> Có thể thực hiện bằngcáp USB, bluetooth, Wi-Fi, đồng bộ Cloud (tùy thiết bị).<br /> <br /> <strong>- Bước 3: </strong>Nhập dữ liệu<br /> Project > Import > Chọn định dạng file > Chọn file cần nhập.<br /> <br /> <strong>- Bước 4: </strong>Khai báo cấu trúc dữ liệu<br /> Đây là bước quan trọng nhất.Người dùng cần khai báo chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Point ID</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Code</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Leica Captivate và Trimble Access, khi nhập dữ liệu cần kiểm tra chính xác thứ tự cột dữ liệu để tránh sai lệch tọa độ.<br /> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Những lỗi thường gặp khi nhập và xuất dữ liệu RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù việc xuất và nhập dữ liệu trên các phần mềm như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay MateSurvey (Geomate) tương đối đơn giản, nhưng thực tế ngoài công trường vẫn thường xuyên phát sinh các lỗi làm mất thời gian xử lý dữ liệu hoặc thậm chí ảnh hưởng đến kết quả thi công.<br /> Dưới đây là những lỗi phổ biến nhất.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.1 Xuất file thành công nhưng mở ra không có dữ liệu</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá nhiều người dùng RTK từng gặp với các biểu hiện như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File được tạo thành công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có tên dự án hoặc tiêu đề file.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có điểm tọa độ bên trong.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường gặp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Project hoặc Job.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Data File.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đang bật bộ lọc dữ liệu (Filter).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai loại điểm cần xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Database không chứa dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Kiểm tra lại Point Database.<br /> - Kiểm tra đúng Project đang làm việc.<br /> - Tắt các bộ lọc dữ liệu trước khi xuất.<br /> - Chọn xuất toàn bộ điểm (All Points).<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.2 File đuôi .CSV mở ra bằng excel nhưng hiển thị trống hoặc sai cột</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biểu hiện thường thấy:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File vẫn có dung lượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel mở được nhưng dữ liệu dồn vào một cột.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tưởng rằng file bị lỗi hoặc mất dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel đọc sai dấu phân cách dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File sử dụng dấu "," trong khi máy tính đang cấu hình dấu ";" hoặc ngược lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mã hóa ký tự (Encoding).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Mở thử bằng Notepad hoặc Notepad++.<br /> - Sử dụng chức năng Import Data / From Text trong Excel.<br /> - Kiểm tra lại dấu phân cách dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.3 CSV của người khác có nhiều cột hơn hoặc ít cột hơn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều người cho rằng CSV là định dạng cố định. Thực tế không phải vậy. Một file CSV có thể chỉ chứa:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point ID ( Số hiệu điểm)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting ( Tọa đọ X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing ( Tọa độ Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation ( Cao độ)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài các trường dữ liệu cơ bản như <strong>Số hiệu điểm, Tọa độ X, Tọa độ Y và Cao độ H</strong>, nhiều phần mềm RTK còn cho phép xuất thêm các thông tin như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mã điểm (Code)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao sào (Rod Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao ăng-ten (Antenna Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số PDOP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm (Fix Status)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc phương vị (Azimuth)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô tả hoặc ghi chú điểm (Description)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân là do cấu hình định dạng xuất dữ liệu của từng phần mềm hoặc từng đơn vị sử dụng. Đây không phải lỗi dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.4 Nhập dữ iệu thành công nhưng điểm nằm sai vị trí</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi nguy hiểm nhất vì rất khó phát hiện nếu không kiểm tra lại.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhầm thứ tự cột X và Y.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục VN-2000.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai đơn vị tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ:</strong></u><br /> Đúng: Point,X,Y,H<br /> P1,234567.123,1234567.456,10.123<br /> <br /> Sai: Point,Y,X,H<br /> P1,1234567.456,234567.123,10.123</em><br /> <br /> Kết quả là điểm có thể xuất hiện cách vị trí thực hàng chục hoặc hàng trăm kilomet.<br /> <br /> <strong>Cách xử lý:</strong><br /> - Kiểm tra lại cấu trúc file.<br /> - Kiểm tra đúng thứ tự Easting và Northing.<br /> - Kiểm tra hệ tọa độ công trình.<br /> - Đối chiếu với một điểm khống chế đã biết.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.5 Nhập dữ liệu thành công nhưng không nhìn thấy điểm</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lúc này máy báo nhập dữ liệu thành công, danh sách điểm vẫn có nhưng không nhìn thấy điểm trên bản đồ.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nằm ngoài phạm vi hiển thị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai Projection.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Zoom Extents.<br /> - Kiểm tra lại hệ tọa độ.<br /> - Kiểm tra lại Projection và KTT.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.6 Nhập dữ liệu định dạng DXF nhưng không hiển thị đối tượng</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lỗi này xảy ra do những nguyên nhân như:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer đang tắt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF không tương thích.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng nằm ngoài vùng hiển thị.</span></span></li> </ul> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cách xử lý:</span></span></strong><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Layer.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thử lưu lại DXF phiên bản thấp hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Zoom Extents để kiểm tra toàn bộ bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> CSV, TXT, DAT, DXF, KML hay SHP đều là những định dạng dữ liệu quan trọng trong công tác đo đạc hiện đại. Không có định dạng nào là "tốt nhất" cho mọi trường hợp. Lựa chọn đúng định dạng xuất dữ liệu sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thời gian xử lý văn phòng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế lỗi chuyển đổi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả phối hợp giữa khảo sát, thiết kế và thi công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm rủi ro mất dữ liệu hoặc bàn giao sai định dạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế hiện nay, CSV vẫn là định dạng phổ biến nhất nhờ tính linh hoạt, dễ sử dụng và khả năng tương thích với hầu hết các phần mềm đo đạc, CAD và GIS.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/588632958_1241954074621445_1455996422080404648_n.jpg" style="width: 747px; height: 420px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '2026060609425746cdab6ee8d08331f2369b4b04a4a4d5.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Định dạng file RTK: CSV, DAT, DXF, KML, SHP và Cách Xuất, Nhập Dữ Liệu', 'meta_key' => '', 'meta_des' => 'Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.', 'created' => '2026-06-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '877', 'slug' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '545', 'rght' => '546', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '816', 'name' => 'Sửa chữa máy thủy bình bị rơi, va đập – Nguyên nhân gây đo sai ngoài công trường', 'code' => null, 'alias' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-–-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> <br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy. Đây được xem như “trái tim” của máy thủy bình tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850337449414_cbf23e5b4edf679eed8636152be1bb10.jpg" style="width: 600px; height: 800px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cụm cân bằng tự động hoạt động theo nguyên lý trọng lực với hệ thống con lắc treo bằng dây cực nhỏ kết hợp cơ cấu giảm dao động từ tính để giữ tia ngắm luôn nằm ngang. Nhờ đó máy có thể tự cân bằng nhanh và cho độ chính xác cao ngoài công trường. Tuy nhiên, cấu tạo này cũng khá nhạy với va đập. Chỉ một cú rơi hoặc vận chuyển mạnh cũng có thể gây các lỗi như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Liệt rung cụm compensator.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhảy rung hoặc kẹt rung.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xoắn hoặc lệch dây treo con lắc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số cao độ tăng bất thường.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế sửa chữa, phần lớn các trường hợp máy thủy bình đo sai sau va đập đều liên quan trực tiếp đến cụm cân bằng tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850429563246_858468dda57655643001cdc5b7476042.jpg" style="width: 600px; height: 800px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Một số dấu hiệu nhận biết máy thủy bình bị sai sau va đập</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi máy thủy bình bị rơi, va đập hoặc vận chuyển mạnh, nếu xuất hiện các dấu hiệu dưới đây thì nên kiểm tra ngay cụm cân bằng tự động bên trong máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả chênh lệch bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng một vị trí nhưng đo nhiều lần ra số khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số rất lớn, thậm chí lệch đến hàng mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy vẫn đọc mia bình thường nhưng cao độ không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi lắc nhẹ máy không còn nghe tiếng rung “roong roong” êm như lúc mới mua.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, cụm con lắc bên trong đã bị:<br /> <br /> • Liệt rung<br /> • Kẹt rung<br /> • Xoắn dây treo<br /> • Hoặc mất khả năng cân bằng tự động<br /> <br /> Điều nguy hiểm là bên ngoài máy vẫn có thể hoạt động “có vẻ bình thường”, khiến người dùng khó phát hiện nếu không kiểm tra sai số trước khi thi công. Vì vậy, sau mỗi lần máy bị va đập, nên kiểm tra sai số góc i hoặc test đo đi – đo về trước khi tiếp tục sử dụng ngoài công trường.<br /> <br /> Khuyến nghị sau khi thiết bị bị va đập:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy và ốc cân bằng bằng cách quay máy 180° để quan sát độ dịch chuyển bọt thủy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai số góc i bằng phương pháp hai mia hoặc thử nghiệm đối chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không tiếp tục đo công trình khi chưa xác định chính xác tình trạng thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì chỉ một máy bị lệch cũng có thể truyền sai số cho toàn bộ số liệu ngoài công trường.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (6).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 420px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Qui trình sửa chữa máy thủy bình tại Trắc địa Thành Đạt</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bước 1: Tiếp nhận và kiểm tra tổng thể thiết bị.<br /> Bước 2: Kiểm tra cụm treo con lắc và cụm cân bằng tự động.<br /> Bước 3: Báo lỗi, báo giá sửa chữa và hiệu chỉnh.<br /> Bước 4: Cân chỉnh cụm compensator — công đoạn quan trọng nhất.<br /> Bước 5: Hiệu chỉnh sai số góc i.<br /> Bước 6: Kiểm tra thực địa sau sửa chữa.<br /> Bước 7: Dán tem kiểm nghiệm trước khi bàn giao cho khách hàng.<br /> <br /> Một máy thủy bình bị lệch không chỉ làm sai một điểm đo… mà có thể truyền sai số cho toàn bộ tuyến hoặc số liệu ngoài công trường.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Q&A - Kiểm tra máy thủy bình/ thủy chuẩn sau khi bị rơi, va đập</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy thủy bình bị rơi/ va đập có cần kiểm tra lại không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Đây là bước rất quan trọng trước khi tiếp tục thi công vì chỉ một sai lệch nhỏ trên máy thủy bình cũng có thể ảnh hưởng đến toàn bộ số liệu cao độ ngoài công trường. Nhiều trường hợp máy vẫn đọc mia bình thường nhưng thực tế tia ngắm đã bị sai lệch sau va đập.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi bị rơi máy thủy bình thường gặp những lỗi gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số lỗi phổ biến gồm:<br /> • Lệch bọt thủy.<br /> • Sai số góc i lớn.<br /> • Liệt rung hoặc nhảy rung cụm cân bằng tự động.<br /> • Nhìn mia hoặc mục tiêu không rõ.<br /> • Hư ốc cân bằng, vi động hoặc đế máy.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình bị lệch bọt thủy?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường do vận chuyển không đúng cách hoặc máy bị tác động mạnh khiến hệ thống cân bằng thay đổi vị trí, dẫn đến máy khó cân bằng hoặc cân bằng nhưng số đo không ổn định.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sai số góc i trên máy thủy bình là gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i là tình trạng tia ngắm không còn nằm ngang chuẩn. Khi đó đo đi – đo về có thể cho kết quả khác nhau và sai số cao độ tăng bất thường. Đây là lỗi rất phổ biến sau khi máy thủy bình bị va đập.</span></span></p> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Sai số góc i.png" style="width: 665px; height: 295px;" /></h3> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>“Liệt rung” hoặc “nhảy rung” là gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi liên quan đến cụm cân bằng tự động (Automatic Compensator) bên trong máy thủy bình. Cụm con lắc bên trong có thể bị: đứt dây treo, xoắn dây, kẹt rung hoặc lệch cơ cấu giảm dao động từ tính. <br /> Khi đó máy không còn tự cân bằng chính xác dù vẫn có thể đọc mia bình thường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850459087569_e24952711404d15f27d74612fb6b68f7.jpg" style="width: 460px; height: 219px;" /></span></span></p> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Dây rung máy thủy bình</em></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình nhìn mia không rõ sau va chạm?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân có thể do:<br /> <br /> • Kính bị bẩn hoặc trầy xước.<br /> • Hệ thống lấy nét bị ảnh hưởng.<br /> • Cụm quang học bị lệch sau va đập.<br /> <br /> Nếu không kiểm tra sớm có thể ảnh hưởng trực tiếp đến độ chính xác đo đạc.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy bị hư ốc cân bằng hoặc đế máy có nghiêm trọng không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Nếu máy bị rơi mạnh, các bộ phận cơ khí như: vi động, ốc cân bằng, đế máy… có thể bị cong, nứt hoặc biến dạng khiến việc cân bằng và đo đạc không còn chính xác như ban đầu.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi máy thủy bình bị rơi nên làm gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy, kiểm tra sai số góc i và cụm con lắc tự động trước khi tiếp tục đo công trình. </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm để tránh truyền sai số cho toàn bộ số liệu thi công. </span></p> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <strong style="margin: 0px; padding: 0px; font-weight: bold;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><a href="https://zalo.me/0913051734">Trắc Địa Thành Đạt</a> – Cung cấp máy thủy bình chính hãng!</span></span></strong></p> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Hotline: <strong style="margin: 0px; padding: 0px; font-weight: bold;">0913 051 734 / 0942 288 388</strong></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Địa chỉ: 145 Láng Hạ – Đống Đa – Hà Nội<br style="margin: 0px; padding: 0px;" /> Fanpage: Trắc Địa Thành Đạt</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '20260521180410f10bb16a2b4a9dbcb155bfe047377890.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Sửa Chữa Máy Thủy Bình Bị Rơi, Va Đập – Nguyên Nhân Gây Đo Sai & Cách Khắc Phục!', 'meta_key' => '', 'meta_des' => 'Máy thủy bình bị rơi, va đập dễ gây liệt rung, nhảy rung, sai số góc i và đo cao độ sai. Tìm hiểu nguyên nhân, dấu hiệu nhận biết và quy trình sửa chữa – hiệu chỉnh máy thủy bình tại Trắc Địa Thành Đạt.', 'created' => '2026-05-21', 'modified' => '2026-07-12', 'status' => '1', 'view' => '910', 'slug' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '543', 'rght' => '544', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '815', 'name' => 'Đo hầm bằng máy toàn đạc: So sánh Tunnel App Leica và giải pháp của các hãng khác', 'code' => null, 'alias' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi nói đến đo hầm bằng máy toàn đạc, thách thức lớn nhất không nằm ở thao tác đo… mà ở việc kiểm soát sai số và tiến độ thi công ngay tại hiện trường.</span></span>', 'content' => '<p> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong các công trình hầm, metro hoặc hạ tầng ngầm, đo hầm bằng máy toàn đạc là phương pháp gần như bắt buộc do không thể sử dụng GNSS. </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tuy nhiên, thách thức lớn nhất không nằm ở việc đo được điểm, mà là kiểm soát sai số và phát hiện sai lệch kịp thời ngay tại hiện trường. Nếu sai số chỉ được phát hiện sau khi xử lý dữ liệu tại văn phòng, việc hiệu chỉnh sẽ trở nên tốn kém và ảnh hưởng trực tiếp đến tiến độ thi công. </span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chính vì vậy, các hãng thiết bị trắc địa đã phát triển nhiều giải pháp khác nhau nhằm hỗ trợ kỹ sư kiểm soát tốt hơn trong quá trình đo hầm.</span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Tunnel App trên máy toàn đạc Leica FlexLine</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 Tunnel App là gì?</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tunnel App là module phần mềm tích hợp trong hệ điều hành FlexField trên các dòng máy toàn đạc Leica FlexLine như TS03 và TS07.<br /> <br /> Ứng dụng này cho phép người dùng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nạp dữ liệu thiết kế tuyến và biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực hiện stakeout trực tiếp ngoài hiện trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo profile và kiểm tra đào – đắp (cut & fill)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh sai lệch với thiết kế ngay trên máy</span></span></li> </ul> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.2 Ưu điểm của Tunnel App</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với phương pháp đo truyền thống, Tunnel App mang lại một số lợi ích rõ rệt:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thao tác trung gian giữa hiện trường và văn phòng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hiển thị sai lệch trực quan theo biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ phát hiện sai số ngay trong quá trình đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng tốc độ thi công và kiểm tra</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nổi bật của Leica là khả năng tích hợp toàn bộ workflow ngay trên thiết bị, phù hợp với các công trình cần triển khai nhanh ngoài hiện trường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Quy trình đo hầm ngoài công trường</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị của Leica, Trimble, Topcon hay các hãng khác, quy trình đo hầm bằng máy toàn đạc ngoài công trường về bản chất vẫn tuân theo một nguyên tắc chung: t<strong>hiết lập đúng – bố trí đúng – kiểm tra liên tục.</strong><br /> <br /> Bước đầu tiên và quan trọng nhất là <strong>thiết lập trạm máy</strong>. Kỹ sư trắc địa cần đặt máy tại vị trí khống chế đã biết tọa độ và định hướng bằng phương pháp <strong>backsight hoặc resection</strong>. Độ chính xác của bước này có ảnh hưởng trực tiếp đến toàn bộ tuyến hầm, bởi chỉ cần sai lệch nhỏ ở định hướng ban đầu cũng có thể dẫn đến sai số tích lũy theo chiều dài công trình.<br /> <br /> Sau khi trạm máy được thiết lập chính xác, dữ liệu thiết kế sẽ được nạp vào hệ thống. Các thông tin bao gồm tim tuyến (alignment), lý trình và biên dạng hầm (cross-section) đóng vai trò làm cơ sở để thực hiện stakeout ngoài thực địa. Ở giai đoạn này, việc kiểm tra lại hệ tọa độ, đơn vị và hướng tuyến là cần thiết nhằm tránh các sai sót do nhập liệu hoặc chuyển đổi dữ liệu.<br /> <br /> Trong quá trình thi công, các điểm đặc trưng của biên dạng hầm sẽ được bố trí trực tiếp ngoài hiện trường thông qua máy toàn đạc. Người đo sẽ lần lượt xác định vị trí các điểm theo thiết kế và hướng dẫn thi công đào hầm theo đúng hình học yêu cầu. Tuy nhiên, việc “bố trí đúng” chưa phải là bước cuối cùng.<br /> <br /> Khâu kiểm tra mới là yếu tố quyết định chất lượng. Các điểm sau khi bố trí cần được đo lại và so sánh với thiết kế bằng các phép đo lặp hoặc thông qua các công cụ kiểm tra trên máy. Việc này giúp phát hiện sớm các sai lệch về vị trí, cao độ hoặc hình dạng biên dạng hầm, từ đó kịp thời điều chỉnh trước khi sai số bị tích lũy.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/LGS_streamline_tunnel_construction_and_maintenance_2480x750.jpg" style="width: 800px; height: 242px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế, nhiều sai số lớn trong thi công hầm không đến từ thiết bị, mà đến từ việc không kiểm tra hoặc kiểm tra quá muộn. Vì vậy, một quy trình đo hầm hiệu quả luôn phải đảm bảo nguyên tắc: đo đến đâu, kiểm tra đến đó.<br /> <br /> Sự khác biệt giữa các hãng thiết bị hiện nay chủ yếu nằm ở mức độ hỗ trợ người dùng trong từng bước của quy trình này. Tuy nhiên, dù sử dụng công nghệ nào, cốt lõi của đo hầm bằng máy toàn đạc vẫn không thay đổi: <strong>Thiết lập chuẩn – dữ liệu đúng – kiểm tra liên tục.</strong></span></span> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. So sánh các giải pháp đo hầm của các hãng</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Leica – All-in-one tại hiện trường</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica là hãng đi theo hướng tích hợp toàn bộ quy trình đo hầm vào một ứng dụng duy nhất. Tunnel App giúp người dùng thực hiện liên tục các bước từ nạp dữ liệu, bố trí đến kiểm tra ngay tại hiện trường mà không cần phụ thuộc nhiều vào xử lý hậu kỳ.<br /> Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình thi công nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đội thi công cần thao tác đơn giản, trực quan.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica App Tunnel 3.jpg" style="width: 800px; height: 428px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Trimble – Hệ sinh thái và xử lý thiết kế</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trimble sử dụng phần mềm Trimble Access kết hợp với module Tunnels chuyên dụng. Giải pháp này tập trung vào khả năng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý alignment phức tạp</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối với phần mềm thiết kế như TBC</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý dữ liệu trong các dự án lớn</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự án metro, hầm quy mô lớn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu đồng bộ BIM</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Trimple tunnel.jpg" style="width: 800px; height: 446px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Topcon – Linh hoạt theo workflow</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không giống Leica, <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu-topcon-gm-50-series.html">Topcon</a> không phát triển một module “Tunnel App” riêng biệt cho dòng máy toàn đạc. Thay vào đó, hãng lựa chọn hướng tiếp cận linh hoạt hơn thông qua phần mềm <strong>MAGNET Field</strong>. Trong thực tế, công tác đo hầm bằng máy toàn đạc Topcon được thực hiện bằng cách kết hợp nhiều chức năng sẵn có như alignment, stakeout, offset và kiểm tra profile.<br /> <br /> <strong>Workflow điển hình trên Topcon</strong><br /> <br /> Người dùng sẽ bắt đầu bằng việc nạp dữ liệu tuyến (alignment) và các thông số thiết kế vào phần mềm. Sau khi thiết lập trạm máy, quá trình stakeout được thực hiện thông qua các điểm tuyến và các khoảng lệch (offset) theo biên dạng hầm. <br /> Đối với kiểm tra hình học, kỹ sư thường đo lại các điểm trên biên dạng thực tế và so sánh với thiết kế thông qua các công cụ kiểm tra trong phần mềm hoặc xử lý hậu kỳ.<br /> <br /> <strong>Ưu điểm của cách tiếp cận này</strong><br /> <br /> Điểm mạnh lớn nhất của Topcon là tính linh hoạt. Người dùng có thể tùy biến quy trình đo theo từng loại công trình mà không bị giới hạn bởi một module cố định. Điều này đặc biệt hữu ích trong các dự án có yêu cầu đặc thù hoặc khi dữ liệu thiết kế không theo một chuẩn cố định.<br /> <br /> <strong>Hạn chế cần lưu ý</strong><br /> <br /> Tuy nhiên, việc không có một module tunnel chuyên dụng cũng đồng nghĩa với việc:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy trình đo phụ thuộc nhiều vào kinh nghiệm người sử dụng,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc kiểm tra sai số không trực quan bằng các hệ thống tích hợp,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần hiểu rõ workflow để tránh sai sót trong quá trình triển khai.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nói cách khác, Topcon không làm “ít hơn”, nhưng yêu cầu người dùng phải “hiểu nhiều hơn”.</span></span><br /> <br /> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel.jpg" style="text-align: center; font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 800px; height: 533px;" /></h3> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.4 Nikon / Sokkia – Phương pháp truyền thống</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các dòng máy của Nikon và Sokkia chủ yếu sử dụng phương pháp truyền thống:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout cơ bản</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo và kiểm tra thủ công</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giải pháp này vẫn đáp ứng tốt các công trình quy mô nhỏ, nhưng hạn chế khi cần xử lý các dự án phức tạp.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Sự khác biệt cốt lõi trong đo hầm và yếu tố ảnh hưởng tới độ chính xác</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm khác biệt quan trọng nhất giữa các giải pháp không nằm ở khả năng đo, mà nằm ở thời điểm phát hiện sai số.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp truyền thống: phát hiện sai sau khi đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm tích hợp (Tunnel App, Tunnels Module): phát hiện sai ngay trong quá trình đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc phát hiện sai số sớm giúp giảm chi phí hiệu chỉnh và hạn chế rủi ro trong thi công.<br /> </span></span> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Những yếu tố ảnh hưởng đến độ chính xác</strong></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị hay phần mềm nào, độ chính xác trong đo hầm vẫn phụ thuộc vào:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định hướng trạm máy (backsight)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện môi trường ảnh hưởng đến đo EDM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số truyền tọa độ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kỹ năng và thao tác của người sử dụng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các phần mềm hiện đại chỉ đóng vai trò hỗ trợ, không thể thay thế hoàn toàn quy trình kiểm soát kỹ thuật ngoài công trường.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel 2.jpg" style="width: 800px; height: 415px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Đo hầm bằng máy toàn đạc đã có sự chuyển dịch rõ rệt từ phương pháp thủ công sang các giải pháp tích hợp và trực quan hơn. Tunnel App của Leica là một ví dụ điển hình cho xu hướng đưa việc kiểm soát sai số xuống ngay tại hiện trường. Trong khi đó, các hãng khác như Trimble, Topcon hay Nikon lựa chọn những hướng tiếp cận khác nhau, phù hợp với từng loại công trình và nhu cầu sử dụng.<br /> Tuy nhiên, yếu tố quan trọng nhất vẫn là: Hiểu đúng quy trình đo và chủ động kiểm soát sai số trong suốt quá trình thi công<br /> <br /> Nếu bạn cần tư vấn lựa chọn máy toàn đạc hoặc giải pháp đo hầm phù hợp với công trình, liên hệ ngay với chúng tôi!<br /> <br /> <span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt – Luôn đồng hành cùng bạn!</strong></span><br /> </span></span>', 'images' => '202604231558382137741e17c2868ead929b32a270f9f6.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Đo hầm bằng máy toàn đạc: Leica Tunnel App và các hãng khác', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách đo hầm bằng máy toàn đạc Leica với Tunnel App và so sánh với Trimble, Topcon, Nikon. Quy trình, ưu nhược điểm và cách kiểm soát sai số ngoài công trường.', 'created' => '2026-04-23', 'modified' => '2026-07-12', 'status' => '1', 'view' => '1482', 'slug' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '541', 'rght' => '542', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '814', 'name' => 'Máy toàn đạc điện tử: ĐO CHUẨN – BỐ TRÍ NHANH – ỔN ĐỊNH NGOÀI CÔNG TRƯỜNG!', 'code' => null, 'alias' => 'may-toan-dac-dien-tu-do-chuan-–-bo-tri-nhanh-–-on-dinh-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> Tại <strong>Trắc Địa Thành Đạt</strong>, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> <br /> Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Vì sao máy toàn đạc vẫn là thiết bị không thể thay thế?</span></span></h2> <br /> <p data-end="216" data-start="105"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong điều kiện thi công thực tế tại Việt Nam, nhiều khu vực thường gặp hạn chế về khả năng đo GNSS, chẳng hạn:</span></span></p> <ul data-end="407" data-start="218"> <li data-end="296" data-section-id="3ju1r3" data-start="218"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không gian bị che khuất bởi nhà cao tầng, công trình dày đặc hoặc tầng hầm</span></span></li> <li data-end="337" data-section-id="k3xm0j" data-start="297"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu vệ tinh yếu hoặc nhiễu mạnh</span></span></li> <li data-end="407" data-section-id="utqol9" data-start="338"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Yêu cầu độ chính xác cao đến milimet trong quan trắc và hoàn công.</span></span></li> </ul> <p data-end="491" data-start="409"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong những trường hợp này, máy toàn đạc vẫn là giải pháp hiệu quả và ổn định nhờ:</span></span></p> <ul data-end="665" data-start="493"> <li data-end="553" data-section-id="1rjirb8" data-start="493"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng đo khoảng cách chính xác cao bằng công nghệ EDM</span></span></li> <li data-end="594" data-section-id="1tziawf" data-start="554"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phụ thuộc vào tín hiệu vệ tinh</span></span></li> <li data-end="665" data-section-id="rakyqa" data-start="595"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm soát chặt chẽ công tác bố trí điểm và thi công ngoài thực địa.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hai chức năng cốt lõi của máy toàn đạc</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 Đo điểm (Measurement)</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là chức năng cơ bản và quan trọng nhất của máy toàn đạc trong công tác khảo sát. Máy thực hiện đo các yếu tố hình học gồm:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc ngang (Horizontal Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc đứng (Vertical Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách (EDM – Electronic Distance Measurement)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ các giá trị này, hệ thống sẽ tính toán và xác định tọa độ không gian của điểm đo dưới dạng (X, Y, Z).<br /> <br /> Ngoài ra, máy toàn đạc hiện đại còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo không gương (Non-prism) trong điều kiện khó tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu trữ và quản lý dữ liệu điểm đo trực tiếp trên máy</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xuất dữ liệu phục vụ xử lý nội nghiệp (CAD, TBC, Civil 3D…)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát địa hình, đo vẽ bản đồ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo hiện trạng công trình, kiểm tra kích thước</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lập lưới khống chế và thu thập dữ liệu phục vụ thiết kế</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica-Nova-TS60-BC-facing-right.jpg" style="width: 750px; height: 258px;" /></span></span><span style="display: none;"> </span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 Bố trí điểm (Stakeout)</span></span></h3> <p data-end="1067" data-start="941"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí điểm là quá trình chuyển thông tin từ bản vẽ thiết kế ra vị trí ngoài thực địa, đóng vai trò quan trọng trong thi công.</span></span></p> <p data-end="1114" data-start="1069"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựa trên tọa độ thiết kế, hệ thống thực hiện:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh tọa độ thiết kế với vị trí thực tế của gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán sai lệch theo các phương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn người đo di chuyển theo các chỉ dẫn:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trái / phải</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tiến / lùi</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lên / xuống</span></span></li> </ul> </li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhờ đó, điểm ngoài thực địa được đưa về đúng vị trí thiết kế với độ chính xác cao.<br /> <br /> Ngoài ra, các dòng máy hiện nay còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí tuyến, cung tròn (Road / Arc stakeout)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí theo lưới, theo tim trục</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai lệch sau thi công (As-built check)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định vị tim trục công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí móng, cột, dầm, sàn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thi công hạ tầng, giao thông, công trình kỹ thuật</span></span></li> </ul> <h2 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/image (11).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 660px; height: 371px;" /></h2> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Những lỗi đo cạnh thường gặp và cách xử lý</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Nguyên lý đo cạnh của máy toàn đạc</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc xác định khoảng cách bằng cách:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát tín hiệu laser hoặc hồng ngoại đến gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận tín hiệu phản xạ quay về</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán khoảng cách dựa trên thời gian truyền (Time of Flight) hoặc độ lệch pha (Phase Measurement).</span></span></li> </ul> </li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các hãng như Leica, Topcon, Nikon hay Trimble đều sử dụng nguyên lý này, chỉ khác nhau về công nghệ xử lý tín hiệu và thuật toán nội bộ.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Các nguyên nhân gây lỗi đo cạnh</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.1 Suy giảm hệ đo EDM<br /> <br /> Đây là nguyên nhân phổ biến nhất trong thực tế. Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo lặp lại cho kết quả khác nhau</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách “nhảy số”, không ổn định</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Linh kiện EDM xuống cấp theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát yếu hoặc bộ thu tín hiệu kém</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Làm việc trong điều kiện ánh sáng mạnh hoặc phản xạ kém</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo tài liệu của Leica Geosystems, độ chính xác đo cạnh phụ thuộc lớn vào cường độ tín hiệu phản xạ và điều kiện môi trường.<br /> <br /> 3.2.2 Lệch trục EDM – trục ngắm (Collimation error)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo gần tương đối đúng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo xa sai lệch tăng dần</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bị va đập, rung lắc trong quá trình sử dụng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lâu không hiệu chuẩn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai lệch cơ khí tích lũy</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số này ảnh hưởng rõ rệt khi đo khoảng cách lớn, đặc biệt trong các công trình yêu cầu độ chính xác cao.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lỗi đo cạnh ( trục) 2.png" style="width: 680px; height: 295px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.3 Sai hằng số gương (Prism constant)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số gần như cố định trên mọi khoảng cách</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng sai loại gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai giá trị hằng số gương (0, -30, +17.5 mm…)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Trimble, việc thiết lập đúng prism constant là điều kiện bắt buộc để đảm bảo độ chính xác đo cạnh.<br /> <br /> 3.2.4 Ảnh hưởng môi trường đo<br /> <br /> Các yếu tố môi trường có thể ảnh hưởng đáng kể đến kết quả đo:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiệt độ và áp suất (P/T)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiễu khí quyển</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bề mặt phản xạ kém (tường sơn tối, bề mặt ướt, kim loại)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo khuyến nghị của FIG, sai số EDM tăng lên đáng kể trong điều kiện khí quyển không ổn định.<br /> <br /> 3.2.5 Sai số do thao tác người dùng<br /> <br /> Đây là nhóm lỗi rất phổ biến ngoài công trường.Bao gồm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựng sào không thẳng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai chiều cao gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập sai trạm máy hoặc điểm định hướng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình hệ tọa độ không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số do người dùng thường khó nhận biết nếu không có quy trình kiểm tra chéo.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Cách khắc phục</span></span></h3> <br /> <ul> <li data-end="2098" data-section-id="zvrhg8" data-start="2066"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra EDM, 2C, MO định kỳ</span></span></li> <li data-end="2130" data-section-id="uu2tiv" data-start="2099"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng đúng prism constant</span></span></li> <li data-end="2172" data-section-id="nwvnt0" data-start="2131"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm tra cạnh chuẩn trước thi công</span></span></li> <li data-end="2209" data-section-id="ux2ibp" data-start="2173"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh đo trong điều kiện bất lợi</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Các dòng máy toàn đạc phổ biến</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Leica</strong><br /> <br /> Leica là thương hiệu cao cấp trong lĩnh vực trắc địa, nổi bật với độ chính xác và độ ổn định lâu dài. Hệ EDM mạnh, khả năng làm việc tốt trong nhiều điều kiện môi trường khác nhau, đặc biệt phù hợp với các công trình yêu cầu kỹ thuật cao.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao, ổn định theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ EDM mạnh, ít bị ảnh hưởng bởi môi trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm và thuật toán xử lý tốt</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình cao tầng, cầu đường, quan trắc, dự án yêu cầu kiểm soát sai số chặt chẽ.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Leica toàn đạc.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Topcon</strong><br /> <br /> Topcon là dòng máy phổ biến nhờ sự cân bằng giữa hiệu năng và chi phí. Thiết bị dễ sử dụng, độ bền tốt, đáp ứng đa dạng nhu cầu thi công ngoài công trường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, thao tác nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ ổn định tốt trong điều kiện công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chi phí hợp lý</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, hạ tầng, thi công phổ thông.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z6599539340575_12c3eac505cba39e86905990604ee094.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nikon</strong><br /> <br /> Nikon là lựa chọn phù hợp cho các đơn vị cần thiết bị đo đạc cơ bản với chi phí đầu tư thấp. Thiết kế đơn giản, dễ tiếp cận và đáp ứng tốt các công việc đo đạc thông thường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giá tốt, dễ tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, phù hợp người mới</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền ổn định</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, khảo sát cơ bản.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/DTM 352 Nikon 2.jpg" style="width: 680px; height: 509px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Sokkia</strong><br /> <br /> Sokkia có cùng hệ sinh thái với Topcon, nổi bật về độ bền và khả năng làm việc ổn định trong điều kiện công trường khắc nghiệt. Thiết bị được đánh giá cao về tính “lành”, ít lỗi vặt.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền cao, ổn định lâu dài</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động tốt trong môi trường khắc nghiệt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác đáp ứng tốt thi công</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình hạ tầng, công trường làm việc cường độ cao.<br /> <br /> <strong>Trimble</strong><br /> <br /> Trimble tập trung mạnh vào giải pháp tích hợp và hệ sinh thái phần mềm. Các dòng máy toàn đạc của Trimble nổi bật ở khả năng kết nối, xử lý dữ liệu và làm việc đồng bộ với GNSS.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ sinh thái phần mềm mạnh (Access, TBC…)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tích hợp GNSS và quản lý dữ liệu tốt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp quy trình làm việc hiện đại</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Dự án lớn, doanh nghiệp cần đồng bộ dữ liệu và quản lý thi công<br /> <br /> > Mỗi thương hiệu đều có định hướng và thế mạnh riêng. Việc lựa chọn nên dựa trên nhu cầu thực tế, điều kiện công trường và yêu cầu kỹ thuật của từng dự án để đạt hiệu quả tối ưu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cách chọn máy toàn đạc phù hợp công trình</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc lựa chọn máy toàn đạc cần dựa vào yêu cầu kỹ thuật và điều kiện thi công thực tế, thay vì chỉ nhìn vào thương hiệu hoặc giá thành.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình dân dụng, hạ tầng cơ bản</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với các dòng Nikon hoặc Topcon nhờ dễ sử dụng, độ ổn định tốt và chi phí hợp lý. Đáp ứng hiệu quả cho các công việc đo đạc, bố trí thông thường.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu độ chính xác cao</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên ưu tiên Leica hoặc các dòng cao cấp, với độ chính xác và độ ổn định cao, phù hợp cho nhà cao tầng, kết cấu thép hoặc các hạng mục cần kiểm soát sai số chặt chẽ.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quan trắc, kiểm soát biến dạng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lựa chọn máy có độ chính xác cao và hệ EDM ổn định, đảm bảo khả năng lặp lại kết quả trong nhiều chu kỳ đo.<br /> <br /> Nguyên tắc quan trọng: Lựa chọn đúng thiết bị theo nhu cầu thực tế sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm sai số trong đo đạc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tối ưu chi phí đầu tư</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nâng cao hiệu quả thi công</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo chất lượng công trình</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Tại sao nên mua máy toàn đạc tại Trắc địa Thành Đạt?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi cung cấp đa dạng các loại máy toàn đạc của các hãng <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu">Leica</a>, Nikon, Topcon, đáp ứng nhiều nhu cầu khác nhau trong thi công và khảo sát.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tư vấn đúng nhu cầu công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ kỹ thuật ngoài công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn sử dụng, kiểm tra sai số</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cung cấp thiết bị chính hãng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> Bạn đang phân vân giữa các dòng máy toàn đạc? Hoặc gặp lỗi đo cạnh ngoài công trường?<br /> <br /> >>> Liên hệ ngay <a href="https://zalo.me/0913051734"><strong>Trắc Địa Thành Đạt</strong></a> để được tư vấn phù hợp nhất! </span></span>', 'images' => '20260505102744e930c0e340a0ba993987b0238086413c.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử: Báo giá, tư vấn chọn máy chuẩn công trình!', 'meta_key' => '', 'meta_des' => 'Tìm hiểu máy toàn đạc điện tử, cách chọn máy phù hợp công trình. Tư vấn thiết bị chính hãng tại Trắc Địa Thành Đạt!', 'created' => '2026-04-20', 'modified' => '2026-07-11', 'status' => '1', 'view' => '6424', 'slug' => 'may-toan-dac-dien-tu-do-chuan-bo-tri-nhanh-on-dinh-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '539', 'rght' => '540', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $tinlq = array( (int) 0 => array( 'Post' => array( 'id' => '644', 'name' => 'GNSS RTK', 'code' => null, 'alias' => 'gnss-rtk', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; border: 0px; background-image: initial; background-position: 0px 0px; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; outline: 0px; vertical-align: top; color: rgb(0, 0, 0); font-size: 14px; text-align: justify; font-weight: 700 !important;">GNSS RTK</span><span style="color: rgb(0, 0, 0); font-size: 14px; text-align: justify;"> được biết đến là thiết bị dùng trong công tác trắc địa giúp hỗ trợ quá trình khảo sát địa hình. Với khả năng tự động vẽ và lưu lại các khu vực khảo sát giúp nhanh chóng hoàn thiện các bản vẽ đầy đủ, chính xác với các thông số kỹ thuật cần thiết. Đây là thiết bị hỗ trợ đắc lực cho những người làm công tác trắc địa để có thể hoàn thành công việc nhanh chóng, tiết kiệm thời gian và chi phí với độ chính xác cao.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường hiện nay có rất nhiều dòng máy GNSS RTK với sự đa dạng về kiểu dáng thiết kế, các tính năng cũng như kích thước cho khách hàng lựa chọn. Với mỗi sản phẩm sẽ có những đặc tính cũng như công năng riêng phù hợp với nhu cầu sử dụng của từng đối tượng khách hàng cũng như tính chất công việc. Cùng tìm hiểu ưu và nhược điểm của máy GNSS RTK để có cái nhìn tổng quan về nó trước khi bạn lựa chọn đầu tư cho dự án của mình.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <strong>Ưu điểm nổi bật của máy GNSS RTK </strong><br /> <br /> Đảm bảo độ chính xác cao nhất trong quá trình làm việc. Đối với công tác trắc địa thì độ chính xác là thông số quan trọng nhất cần hướng tới trong quá trình làm việc do đó các thiết bị hỗ trợ cũng cần tối ưu hóa được yếu tố này. Với việc áp dụng công nghệ RTK cũng như CORS Network các mẫu máy này đảm bảo mang đến các thông số chuẩn nhất để cung cấp dữ liệu cho quá trình vẽ cũng như hình thành các dữ liệu chung.<br /> <br /> Trong việc sử dụng công nghệ GNSS thì CORS là trạm tham chiếu hoạt động liên tục để tạo sự liên kết các thiết bị với đường truyền tín hiệu. Công nghệ này giúp khoảng cách tối đa giữa trạm gốc và máy định vị GNSS được thiết lập khoảng 10 - 15km, giúp tăng khoảng cách cho hoạt động của máy. Điều này giúp giảm nhân công cũng như chi phí trong quá trình làm việc.<br /> <br /> Với thiết kế nhỏ gọn, dễ dàng di chuyển giúp mang đến sự tiện lợi tối đa trong quá trình sử dụng. <br /> <br /> Một ưu điểm phải kế đến của loại máy GNSS RTK đó là việc tích hợp nhiều tính năng thông minh trong cùng thiết bị. Các tính năng điều khiển bằng giọng nói, bảng điều khiển điện tử, việc thay đổi kích thước máy được tích hợp …giúp dễ dàng sử dụng cũng như có thể thực hiện được nhiều chức năng khác nhau cùng lúc.<br /> <br /> Bộ nhớ trong lớn giúp tăng khả năng lưu trữ thông tin cùng với đó là khả năng kết nối với máy tính, điện thoại, bluetooth hay 3G, 4G giúp nâng cao tối đa được các công năng cũng như sự tiện lợi trong quá trình sử dụng.<br /> <br /> Khả năng kết nối với các thiết bị khác tối ưu cùng với hệ thống CORS.<br /> <br /> Với chất liệu cao cấp có khả năng chống va đập cũng như hạn chế tối đa các tác động của các yếu tố bên ngoài giúp mang đến sản phẩm bền đẹp lâu dài theo thời gian sử dụng.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/phân phối máy định vị vệ tinh 2 tần số rtk (1).png" style="width: 850px; height: 604px;" /><br /> <br /> <strong>Nhược điểm của máy GNSS RTK</strong><br /> <br /> Hiện nay, máy GPS –GNSS RTK chất lượng dù đã được tích hợp đầy đủ các tính năng nhưng để có được độ chính xác tuyệt đối cùng với vi</span>ệc</span> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">thực hiện thêm nhiều công việc khác các bạn cần phải có sự kết nối thêm các thiết bị khác để sử dụng.<br /> <br /> Giới hạn làm việc của máy trong một phạm vi nhất định cũng là một khó khăn trong quá trình sử dụng. Do đó, cần tìm hiểu đầy đủ các thông số của máy trước khi lựa chọn để phù hợp với đặc điểm công việc.<br /> <br /> Giá thành cao cũng là một nhược điểm cần tính đến khi quyết định đầu tư. <br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Máy RTK.png" style="width: 850px; height: 680px;" /><br /> <br /> </span></span>', 'images' => '2021081816133230412c34d3b16d2ec66a3d1eba4d0d89.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Máy RTK, máy định vị vệ tinh RTK, máy GPS RTK, máy định vị vệ tinh GNSS RTK, máy RTK giá rẻ, máy RTK tốt nhất', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-18', 'modified' => '2026-07-12', 'status' => '1', 'view' => '20547', 'slug' => 'gnss-rtk', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '231', 'rght' => '232', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '641', 'name' => 'Phần mềm LandStar 7 và cách cài đặt trên máy tính', 'code' => null, 'alias' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LandStar 7 là một ứng dụng miễn phí được phát triển bởi www.chcnav.com, thuộc danh mục Bản đồ và dẫn đường. </span></span>', 'content' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="294" src="https://www.youtube.com/embed/04hr6Gy-3RE" title="YouTube video player" width="680"></iframe><br /> <br /> LandStar7 là giải pháp phần mềm khảo sát đã được kiểm chứng thực địa mới nhất dành cho mọi thiết bị Android và bộ điều khiển dữ liệu CHCNAV. Được thiết kế cho các nhiệm vụ khảo sát và lập bản đồ có độ chính xác cao, LandStar7 cung cấp khả năng quản lý quy trình làm việc liền mạch, giao diện người dùng đồ họa dễ học và dễ sử dụng để hoàn thành tất cả các dự án của bạn một cách hiệu quả. Các định dạng nhập và xuất dữ liệu toàn diện, nhiều phương pháp đo lường đảm bảo năng suất tức thì.<br /> <br /> - Hỗ trợ nhiều loại định dạng nhập và xuất khác nhau LandStar7 nhập và xuất DXF, DWG, SHP, KML, KMZ, CSV, DAT, TXT cũng như nội dung dữ liệu được tùy chỉnh đầy đủ từ dự án khảo sát lựa chọn các định dạng CSV, DAT và TXT.<br /> <br /> - Xác định vị trí và trực quan hóa dữ liệu dự án của bạn trong nháy mắt LandStar7 tích hợp bản đồ trực tuyến của Google, OSM, BING và WMS để cung cấp thông tin vị trí có ý nghĩa cho các nhà khảo sát và chuyên gia xây dựng. Các dự án được hiển thị trong địa hình khu vực hoặc hình ảnh vệ tinh trong thời gian thực.<br /> <br /> - Rất linh hoạt và sẵn sàng cho nhiều ứng dụng LandStar7 được thiết kế để cung cấp cho bạn các bộ tính năng đặc biệt, từ khảo sát đất đai, các dự án xây dựng và kỹ thuật, lập bản đồ, thu thập dữ liệu GIS, liên quan đến đường đến khảo sát đường ống.<br /> <br /> Giao diện người dùng có thể tùy chỉnh của nó giúp LandStar7 dễ sử dụng bằng cách tập trung vào các chức năng thiết yếu thường được sử dụng. Quy trình phát triển phần mềm linh hoạt Nhóm phát triển LandStar7 của chúng tôi giữ liên lạc thường xuyên với các nhà khảo sát, các chuyên gia xây dựng và mạng lưới đối tác trên toàn thế giới của chúng tôi để mang lại các chức năng vượt trội mới. Khi sử dụng LandStar7 ngay hôm nay, bạn được đảm bảo tận hưởng các tính năng mới thường xuyên mà không phải trả thêm phí.<br /> <br /> <strong>>>></strong> Trong bài viết bên dưới đây chúng tôi sẽ giới thiệu tới bạn cách cài đặt LandStar 7 trên máy tính (PC Windows & Mac). Phương pháp mà chúng tôi áp dụng là sử dụng Bluestacks, công cụ giả lập hệ điều hành Android hàng đầu hiện nay. Tất cả những gì bạn cần chỉ là một chiếc máy tính chạy Windows hoặc Mac.<br /> <br /> <strong>Bước 1:</strong> Tải xuống và cài đặt Bluestacks<br /> Tải phiên bản mới nhất tại đây <a href="https://www.bluestacks.com/vi/index.html" target="_blank">https://www.bluestacks.com/vi/index.html</a>. Trang web này hỗ trợ tiếng Việt nên bạn có thể dễ dàng tải về file cài đặt của Bluestacks. Quá trình tải về có thể mất vài phút.<br /> Sau khi tải về, nhấp chuột vào file bạn mới tải xuống để bắt đầu quá trình cài đặt. Giao diện cài đặt rất đơn giản, quá trình cặt đặt sẽ diễn ra nhanh chóng. Nếu có bất cứ vấn đề gì bạn có thể vào mục hỏi đáp của Bluestacks để tham khảo cách xử lý.<br /> <br /> <strong>Bước 2:</strong> Tải xuống file cài đặt của LandStar 7 cho máy tính PC Windows<br /> File cài đặt này có đuôi là .APK. APK là viết tắt của cụm từ tiếng Anh "Android application package" (tạm dịch là bộ cài đặt ứng dụng cho hệ điều hành Android). Bạn có thể tải về file apk này từ trang web của chúng tôi <a href="https://drive.google.com/file/d/1vSHDZvVz9EjJtpVAeKgVzJaua3D-Wwf1/view?usp=sharing">TẠI ĐÂY</a>.<br /> <br /> <strong>Bước 3:</strong> Tiến hành cài đặt LandStar 7 bằng Bluestacks<br /> Tập tin APK của LandStar 7 sau khi tải về có thể được cài đặt vào Bluestacks theo một trong các cách sau:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhấp đúp vào file APK, cách này đơn giản và nhanh nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuột phải vào file APK, chọn "Open With", sau đó chọn Bluestacks.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kéo thả file APK vào màn hình ứng dụng Bluestacks</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quá trình cài đặt LandStar 7 sẽ diễn ra nhanh chóng. Ngay sau khi quá trình cài đặt kết thúc, bạn sẽ thấy biểu tượng icon của LandStar 7 trên màn hình trang chủ của Bluestacks. Nhấp chuột vào biểu tượng icon này để bắt đầu sử dụng LandStar 7 trên máy tính PC Windows.</span></span><br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> ', 'images' => '2021080616092739e989a091af097f2762083a8ccfb10e.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23109', 'slug' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '225', 'rght' => '226', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '640', 'name' => 'iRTK4 Hi-Target - A Simple but not Simplistic GNSS System', 'code' => null, 'alias' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">iRTK4 Hi-Target là hệ thống thu GNSS thông minh đầy đủ tính năng được trang bị anten mới tích hợp đa kênh tiên tiến cho phép người dùng giải được các bài toán đo đạc một cách chính xác, đáng tin cậy. Tính năng Tilt-Surveying không cần hiệu chuẩn mà vẫn có thể thu thập dữ liệu ở nhiều nơi.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. RTK tiên tiến thế hệ mới<br /> <br /> Quản lý tín hiệu vệ tinh linh hoạt giúp bạn có được giải pháp chính xác hơn. Hiệu suất được cải thiện 20% trong môi trường GNSS đầy thử thách.<br /> <br /> 2.IMU (Biểu tượng)<br /> <br /> Bắt đầu ngay lập tức với công nghệ bù nghiêng không cần hiệu chuẩn, hỗ trợ bạn khảo sát nhanh chóng và chính xác hoặc xác định các điểm mà không cần cân bằng cột, Sai số dưới 3cm trong phạm vi nghiêng 45 °, tăng hiệu suất làm việc lên 20%.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/iRTK4(1).jpg" style="width: 383px; height: 131px;" /><br /> <br /> 3. Sạc nhanh<br /> <br /> Sạc pin của bạn lên đến 50 phần trăm chỉ trong 50 phút với bộ chuyển đổi 45W, nhờ khả năng sạc nhanh, bạn có thể sạc lại trong thời gian ngắn hơn.<br /> <br /> 4. Giao diện người dùng web (WEB UI)<br /> <br /> Cách nhanh chóng và hiệu quả để giám sát và điều khiển các thiết bị phần cứng. Ngoài ra, cung cấp quyền truy cập vào các tính năng được sử dụng phổ biến nhất thông qua trình duyệt web hiện có trên thiết bị bạn chọn — không cần tải xuống hoặc cài đặt bất kỳ thứ gì!<br /> <br /> 5. Smart Base<br /> <br /> Tối ưu hóa tuyệt vời cài đặt chế độ làm việc, Tự động ghép nối Base và Rover của bạn bằng dịch vụ toàn cầu Hi-target, mở rộng phạm vi công việc và tiết kiệm thời gian của bạn.<br /> <br /> Radio ngoài thế hệ mới<br /> <br /> HDL-460A cung cấp thông tin liên lạc dữ liệu đáng tin cậy cho các ứng dụng quan trọng trong đó yêu cầu sự kết hợp của sự ổn định, hiệu suất cao và phạm vi xa.<br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> </span></span>', 'images' => '20210805113424adf751172d9f3d7ddcf7e526d09e3fb6.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-05', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23795', 'slug' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '223', 'rght' => '224', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '639', 'name' => 'Thông số kỹ thuật của một số dòng máy toàn đạc điện tử Leica (cũ): TCR-403, TCR-405, TCR-407, TCR-705, TCR-802, TCR-805', 'code' => null, 'alias' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><font color="#323232">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ: </font><span style="line-height: 107%; letter-spacing: 0.1pt;">Leica TCR-802 Power, Leica TCR-805, Leica TC-705.</span></span></span> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> </h1> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="font-size: 17pt; line-height: 107%; font-family: Helvetica, sans-serif; letter-spacing: 0.1pt;"><o:p></o:p></span></h1> ', 'content' => '<p> <font color="#323232" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ:<br /> <br /> - </font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; line-height: 14.98px; letter-spacing: 0.1pt;">Leica TCR-802 Power<br /> - Leica TCR-805<br /> - Leica TC-705</span><br /> - <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica TCR 403, 405,407 Power</span></span><br /> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">I. Máy toàn đạc điện tử Leica TCR-802 Power</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 2”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/154253643_1379364745733010_5284105879190099443_o (1)(1).jpg" style="width: 480px; height: 360px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Máy toàn đạc điện tử Leica TCR-805</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 5”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/abaec5a286b071ee28a19.jpg" style="width: 480px; height: 640px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">III. Máy toàn đạc điện tử Leica TC-705</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Đo góc<br /> - Có độ chính xác là: ±5”<br /> - Cách đo: liên tục, đối tâm và tuyệt đối.<br /> 2. Hệ thống bù trục<br /> - 4 trục bù nghiêng<br /> - Dải bù nghiêng là : 4’<br /> - Có độ chính xác bù trục là: ±0.5”<br /> 3. Đo cạnh có gương<br /> - Khi đo bằng gương GPR1 là: 1.000m<br /> - Khi đo bằng gương GRZ4 là: 600m<br /> - Khi đo bằng gương mini GMP 101 là: 400m<br /> - Đối với gương giấy 60 x 60mm là: 250m<br /> - Có độ chính xác là: ±1mm + 1.5 ppm / 2.4 giây<br /> - Khi đo nhanh là: ±3 mm+1.5 ppm / 0.8s<br /> - Hiển thị là: 0.1 mm<br /> - Cách thức: Đổi pha với tia laze đỏ đồng trục, rõ rệt.<br /> 4. Đo cạnh không gương<br /> - PinPoint R200 là : 200m<br /> - Có độ chính xác là: ±2mm + 2 ppm / 3 giây<br /> 5. Ống kính<br /> - Có độ phóng đại ống kính là: 30 X<br /> - Độ mở ống kính là : 40mm<br /> - Dải điều quang: từ 1.7 m cho tới vô cùng<br /> 6. Dọi tâm<br /> - Kiểu dọi tâm: bằng tia laze<br /> - Có độ chính xác là: ±1mm tại 1.5 chiều cao máy<br /> 7. Màn hình, bàn phím<br /> - Được trang bị 01 Màn hình LCD rõ nét<br /> - Bàn phím gồm có chữ và số. Có chiếu sáng cho màn hình<br /> 8. Quản lý dữ liệu<br /> - Có bộ nhớ trong là: 10.000 điểm nhập cùng với điểm đo được<br /> - Truyền dữ liệu: GSI-Format via RS232<br /> - Trao đổi dữ liệu: GS116 / IDEX / GS18 / dxf<br /> 9. Pin của máy<br /> - Sử dụng Pin Lithium-Ion GEB 121,<br /> - Thời gian vận hành: từ 5 đến 8 tiếng<br /> 10. Trọng lượng<br /> - Đầu máy nặng: 5,6 kg<br /> 11. Khả năng chống nước và chống bụi<br /> - Đã đạt được tiêu chuẩn IP54<br /> - Có khả năng chịu độ ẩm lên đến 95%</span></span><br /> <br /> <h2> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IV. Máy toàn đạc điện tử Leica TCR-403; TCR-405; TCR-407</span></span></h2> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Dòng sản phẩm LEICA Total Station TPS400 Power (TCR403/405/407 Power) nổi bật với chế độ đo không gương (bằng tia laser) và laser chỉ hướng.</span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Thừa hưởng đầy đủ các tính năng của TPS400, TPS400 Power còn được tích hợp thêm khả năng đo xa bằng tia laser không cần gương, chỉ cần ngắm vào vật có độ phản xạ đủ cao (90%). Điều này đã giúp cho TPS400 Power năng động và tiện lợi hơn.</span><br /> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">1. Ống kính:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ phóng đại: 30 x<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trường nhìn : 1° 30’(1.66 gon) 26m tại khoảng cách 1km<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phạm vi điều tiêu: 1.7 m đến vô cùng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thể lưới: chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 2. Bộ nhớ, truyền dữ liệu:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ nhớ trong: 24.000 điểm ghi<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Định dạng dữ liệu: GSI / DXF / XML / ASCII/XLS/ Định dạng tự do<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 3. Bàn phím và màn hình<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Màn hình: 01 màn hình tinh thể lỏng LCD <a href="http://tracdiathanhdat.vn/gioi-thieu-cong-ty-cp-cn-va-tm-thanh-dat.htm" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;">160×280</a> pixel, đèn chiếu sang 5 cấp<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bàn phím tiêu chuẩn Alpha<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 4. Đo góc ( Hz, V)<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác (ISO 171233): 5”<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Hiển thị: 1” / 0.1 mgon / 0.01 mil<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phương pháp: tuyệt đối, liên tục, đối tâm<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ bù: tăng lên bốn lần sự bù trục<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác thiết đặt độ bù: 2”</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">5. Đo khoảng cách tới điểm phản xạ:</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Đo không gương (đo Laser RL): 170 m </span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Gương GPR1: 3500m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Tấm phản xạ (60mmx60mm): 250m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác/ Thời gian đo:<br style="margin: 0px; padding: 0px;" /> + Đo chính xác (Fine) : ±(5 mm+2 ppmD)/ 2.4 giây,<br style="margin: 0px; padding: 0px;" /> + Đo nhanh: ±(5mm+2ppmD)/0.8 giây,<br style="margin: 0px; padding: 0px;" /> + Đo đuổi: ±(5mm+2ppmD)/< 0.15 s<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 6. Hệ điều hành: Windows CE: 5.0 Core<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 7. Dọi tâm laser:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại : Điểm laser,chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác dọi tâm:1.5mm trên 1.5m chiều cao máy<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 8. Nguồn pin (GEB221):<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại: LithiumIon<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thời gian làm việc: hơn 20 h<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trọng lượng: 5.1 kg<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 9. Môi trường hoạt động:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Biên độ làm việc: từ -20°C tới +50°C<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Chịu nước và bụi (IEC 60529): IP55<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ ẩm: 95% không ngưng tụ</span></span><br /> </p> <table border="1" cellpadding="0" cellspacing="0" style="width:619px;" width="619"> <tbody> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu kỹ thuật </strong></span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>403</strong></span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>405</strong></span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>407</strong></span></span></td> </tr> <tr> <td colspan="3" style="width:499px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Độ góc (Hz, V)</strong></span></span></td> <td style="width:120px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương thức</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo liện tục tuyệt đối</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gốc hiển thị (bước nhảy)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″ / 0.1 mgon / 0.01 mil</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -3)</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3″ (1 mgon)</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5″ (1.5 mgon)</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7″ (2 mgon)</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Ống kính</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ số phóng đại</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">30x</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trưng nhìn</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1° 30′ (26 m at 1 km)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khỏang cách nhìn gần I</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưới chữ thập</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiếu sáng</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Bù nghiêng</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống bù nghiêng</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng 2 trục</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Setting accuracy</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5″</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2″</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Đo khoảng cách bằng tia hồng ngoại</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring range with circular prism GPR1</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring with reflective foil<br /> (60 mm x 60 mm)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">250m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -4)<br /> (fine/quick/tracking)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2mm + 2 ppm/5 mm + 2 ppm/5 mm + 2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">< 1 sec/< 0.5 sec/< 0.15 sec</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chính xác, nhanh, do liên tục.</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo khoảng cách không gương</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R100 (“power”) 170m (90 % reflective)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(Medium atmospheric conditions)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R300 (“ultra”) > 500 m (90 % reflective)<br /> Laser at GPR circular reflector 7’500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3mm+2 ppm/5 mm+2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">typ. 3 s/1 s</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kíck cỡ điểm với 100 m</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">12mm x 40 mm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu</strong></span></span></td> <td colspan="3" style="width:354px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ trong</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 Điểm đo</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao tiếp</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RS232</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng dữ liệu</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GSI/ASCII/dxf/Freely definable formats</span></span></td> </tr> </tbody> </table> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"> </span></span></span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="width: 250px; height: 100px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '202107301638040599a20d3fb57fe46b312b506c17e5cc.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử ', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-30', 'modified' => '2026-07-12', 'status' => '1', 'view' => '19533', 'slug' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '221', 'rght' => '222', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '638', 'name' => 'Những lỗi thường gặp ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m', 'code' => null, 'alias' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span>', 'content' => '<br /> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tham khảo một số lỗi và ý nghĩa của những lỗi này ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m</span></span><br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1565334829-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-dathop-02.jpg" style="width: 620px; height: 477px;" /><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp các lỗi trên hãy liên hệ với chúng tôi qua số hotline để được khắc phục nhé!<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/hotline(1).png" style="width: 250px; height: 100px;" /></span></span><br /> ', 'images' => '2021072917090604e0ee7f57cb99fce8677b2f946c35af.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình điện tử', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-29', 'modified' => '2026-07-12', 'status' => '1', 'view' => '14983', 'slug' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '219', 'rght' => '220', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '637', 'name' => 'So sánh giữa Garmin GPSMAP 66S vs GPSMAP 64S', 'code' => null, 'alias' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tham khảo sự khác nhau giữa hai dòng máy định vị GPSMAP 66s và 64s của hãng Garmin và những ưu điểm vượt trội mà Garmin đã mang tới cho dòng máy GPSMAP 66s nhé.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>GPSMAP 66s</strong>: Thiết bị cầm tay đa vệ tinh tích hợp cảm biến.</span></span><br /> <br /> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">GPSMAP 64s</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">: </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);">Độ nhạy máy thu cao, thiết bị có thể cùng lúc nhận được tín hiệu vệ tinh từ hai hệ thống GPS và GLONASS. GPSMAP 64s</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);"> kèm theo khí áp kế để đo cao độ, la bàn điện tử, kết nối USB tốc độ cao, hỗ trợ khe cắm thẻ nhớ, đồng thời có khả chia sẽ dữ liệu bằng Wireless với các thiết bị Garmin tương thích khác.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/So sánh GPS 66 và 64.jpg" style="width: 690px; height: 459px;" /><br /> <br /> <br /> <u><strong>>>> Cùng so sánh thông số kỹ thuật của hai dòng máy GPSMAP 66s và 64s:</strong></u></span></span><br /> <br /> <br /> <table border="1" cellpadding="0" cellspacing="0"> <tbody> <tr> <td style="width:161px;"> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 66s</strong></span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 64s</strong></span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước tổng thể:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.2 x 16.3 x 3.5cm</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.1 x 16 x 3.6cm</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3 inches</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.6 inches</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ phân giải màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">240 x 400p (pixel)</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">160 x 240p (pixel)</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ khả năng:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">16GB</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4GB</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Waypoint/Routes/ Tracklog:</span></span></td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">20000 Điểm, 250 GPX Track và 300 điểm được lưu</span></span></td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 điểm, 200 điểm được lưu</span></span></td> </tr> </tbody> </table> <br /> <ul> <li> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Theo dõi hoạt động thời tiết </span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tải xuống hình ảnh vệ tinh trực tiếp (không đăng ký)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chắc chắn theo tiêu chuẩn MIL-STD 810G cho hiệu suất nhiệt, sốc và nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhật ký Rinex</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối WiFi / Bluetooth</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Thiết kế phần cứng</strong><br /> Từ góc độ thiết kế, cả hai thiết bị đều cực kỳ giống nhau, với một vài khác biệt nhỏ về kích thước và màn hình<strong>. </strong>GPSMAP 66S có kích thước tổng thể lớn hơn một chút, nhưng sự khác biệt là gần như không thể nhận ra. Ngoài những thay đổi trực quan rõ ràng, họ cảm thấy khá giống với mẫu cũ. Những thay đổi khác là các nút nhỏ gọn hơn một chút nhưng rộng hơn. Các chức năng của nút giống nhau mặc dù phiên bản GPSMAP 66s có menu khác.<br /> <br /> Nút nguồn được đặt ở phía trên của thiết bị. Vị trí trên GPSMAP 64 có vẻ được ưu thích hơn vì bật / tắt dễ dàng nhưng bạn có thể hiểu lý do tại sao Garmin muốn thực hiện thay đổi này vì nó ít có khả năng bị hỏng khi bật thiết bị và lãng phí điện năng của bạn.<br /> <br /> Khác với những thay đổi đó và màn hình lớn hơn một chút, tất cả các cổng đều giống nhau, mặc dù Garmin đã thay đổi dây nguồn / dữ liệu thành MicroUSB. Khe cắm thẻ Micro SD có thể bên dưới pin.<br /> <br /> <strong>Tuổi thọ pin</strong><br /> Cả hai thiết bị đều hoạt động trên hai pin AA và tuổi thọ thông thường sẽ là 16 giờ mặc dù điều đó chủ yếu phụ thuộc vào chức năng ứng dụng và sử dụng GPS của bạn. GPSMAP 66 mới cũng có chức năng "<strong>Expedition"</strong> , giúp tăng đáng kể thời lượng pin của thiết bị bằng cách hạn chế các chức năng phần mềm tự động như điểm theo dõi, thời gian hiển thị và vào chế độ năng lượng thấp.<br /> <br /> <strong>Cách bật chế độ Expedition trên GPSMAP 66s</strong><br /> <br /> Chuyển đến menu chính của thiết bị> Chọn <strong>Cài đặt</strong> > Chọn "<strong>Expedition"</strong> . Sau đó, bạn sẽ được yêu cầu chọn "<em>Tự động, Nhắc hoặc Không bao giờ</em>".<br /> Chọn <em>Tự động</em> sẽ tự động đặt thiết bị sang chế độ thám hiểm sau hai phút hoạt động.<br /> Chọn <em>Nhắc </em>có nghĩa là lần sau khi bạn tắt thiết bị, nó sẽ yêu cầu bạn bật chế độ thám hiểm thay vì tắt.<br /> Chọn <em>Không bao giờ</em> sẽ tắt bất kỳ hình thức chế độ thám hiểm nào bạn đã chạy (Nhắc hoặc Tự động).<br /> <br /> <strong>Các tính năng phần mềm khả dụng trên cả hai thiết bị</strong><br /> Cả hai thiết bị đều có thể ghi lại các điểm / tuyến đường và nhật ký theo dõi, mặc dù GPSMAP 66s có thể ghi lại nhiều hơn.<br /> <br /> Một số tính năng của cả hai dòng máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính diện tích trên các thiết bị (chỉ cần đi bộ chu vi của khu vực).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tải bản đồ tùy chỉnh - bạn có thể tải bản đồ tùy chỉnh tương thích với các thiết bị của Garmin (Garmin Topo hoặc thậm chí City Nav Maps). Nếu bạn tải một trong hai bản đồ này, thì bạn sẽ có quyền truy cập vào chức năng định tuyến tự động trên thiết bị. * Bạn cần sử dụng bản đồ Topo bản FULL để định tuyến.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Geocaching thân thiện - ứng dụng Geocaching được tải sẵn trên các thiết bị, mặc dù vậy bạn cần phải đăng ký thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lịch săn / cá - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin Mặt trời và Mặt trăng - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng xem ảnh </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Kết nối GARMIN</strong><br /> <br /> Garmin Connect - khả dụng trên cả hai thiết bị cho phép thông tin hoạt động được gửi đến tài khoản kết nối Garmin của bạn và cho phép các tính năng được kết nối với điện thoại thông minh của bạn. Các tính năng được kết nối bao gồm Thông báo điện thoại, LiveTrack, GroupTrack.<br /> <br /> <strong>Chức năng cảm biến</strong><br /> Cả hai thiết bị GPS cầm tay trên đều có thể đo độ cao áp kế, la bàn bù 3 trục nghiêng. Việc đo độ cao áp kế sẽ có thể cung cấp cho bạn thông tin về những thay đổi của điều kiện thời tiết (giả sử bạn vẫn ở cùng độ cao) mặc dù nó cần phải được hiệu chỉnh đầy đủ. Cảm biến này cũng có thể được sử dụng để đo lường thay đổi độ cao của bạn và thậm chí đo lường thay đổi độ dốc AVG khi nhìn vào dữ liệu điểm của bạn.<br /> <br /> <strong>>>> Các tính năng phần mềm CHỈ khả dụng trên GPSMAP 66s:</strong><br /> <br /> - Tương thích với ứng dụng khám phá của Garmin - Sau khi được kết nối với ứng dụng điện thoại thông minh của bạn, ứng dụng khám phá của Garmin sẽ tự động đồng bộ hóa và chia sẻ điểm tham chiếu, tuyến đường và tuyến đường với thiết bị của bạn. Bạn cũng có thể tải bản đồ về điện thoại thông minh của mình để truy cập ngoại tuyến.<br /> <br /> - Theo dõi hoạt động thời tiết <br /> Garmin đã tăng thông tin thời tiết của họ một cách đáng kể với lần lặp này. Bây giờ bạn có thể nhận được rất nhiều dữ liệu thời tiết dựa trên thông tin dự báo thời gian thực. Họ có các tùy chọn bản đồ dự đoán riêng biệt về nhiệt độ, gió, mưa và mây. Nó cũng cung cấp radar thời tiết trực tiếp để bạn sẵn sàng thay đổi kế hoạch nếu bạn sắp bị bắt. Tính năng này không phụ thuộc vào kết nối Bluetooth hoạt động với điện thoại thông minh của bạn có bộ phận tiếp nhận. <br /> Hình ảnh vệ tinh hoạt động chính xác giống như trên loạt GPSMAP 64s nhưng bạn không còn phải trả tiền cho nó nữa.<br /> <br /> - Điểm mới của dòng GPSMAP 66s là khả năng tương thích với cửa hàng Connect Connect của Garmin, về cơ bản là 'App Store' của Garmin. <br /> <br /> - Chức năng InReach Remote: bạn có thể điều khiển thiết bị inReach mini của mình.<br /> <br /> - Đèn pin và SOS <br /> Một tính năng độc đáo khác là <strong>đèn pin LED</strong> rất sáng và<strong> đèn hiệu SOS</strong> có thể được sử dụng để báo hiệu sự giúp đỡ. Chức năng SOS chỉ là một nét khẩn cấp. Tuy nhiên, bạn cũng có thể đặt đèn pin nhấp nháy trong khoảng 1-9 lần mỗi giây.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp.jpg" style="width: 250px; height: 100px;" /><br /> <br /> </span></span>', 'images' => '202408021508551192007d993f13fc9de7ce32bd9bab16.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy định vị GPS cầm tay Garmin', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-28', 'modified' => '2026-07-12', 'status' => '1', 'view' => '27644', 'slug' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '217', 'rght' => '218', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '636', 'name' => 'Máy thuỷ bình kỹ thuật số Leica LS10 và LS15', 'code' => null, 'alias' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span></span>', 'content' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10, LS15 có thể làm việc liên tục nhiều giờ, độ sai lệch gần như tuyệt đối không ảnh hưởng tới độ chính xác kết quả đo.<br /> <br /> Leica LS10, LS15 thường được dùng để đo chênh cao, đo khoảng cách với yêu cầu độ chính xác cao tuyệt đối. Máy có thể dẫn cao độ phục vụ cho vẽ thành lập bản đồ.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> Tính linh hoạt </span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dòng máy thủy bình Leica LS10, LS15 được thiết kế để khảo sát, thực hiện san lấp mặt bằng thường xuyên trên các công trường xây dựng, kiểm tra hoặc giám sát các tòa nhà, đường sắt hoặc đường bộ. Với Leica LS10, LS15 bạn luôn có sẵn công cụ làm việc phù hợp.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác và độ tin cậy cao nhất</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bạn sẽ nhận được kết quả đáng tin cậy và chính xác ngay. Chất lượng quang học hàng đầu của Leica Geystems luôn mang lại hình ảnh có độ tương phản cao và giúp việc đọc chính xác và dễ dàng ngay cả trong điều kiện ánh sáng không thuận lợi. Do sự ổn định nhiệt độ cao, Leica LS10, LS15 luôn mang lại kết quả đáng tin cậy không ảnh hưởng bởi bức xạ mặt trời trực tiếp.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chăm sóc khách hàng chỉ với một cú nhấp chuột.</strong> </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông qua <a href="https://leica-geosystems.com/services-and-support/customer-support-services/active-customer-care">ACTIVE CUSTOMER CARE</a> - một mạng lưới toàn cầu gồm các chuyên gia giàu kinh nghiệm bạn sẽ được hướng dẫn một cách thành thạo mọi vấn đề:<br /> - Loại bỏ sự chậm trễ với dịch vụ kỹ thuật cao cấp<br /> - Hoàn thành công việc nhanh hơn với hỗ trợ tư vấn tuyệt vời<br /> - Tránh các lần truy cập trang web tốn kém với dịch vụ trực tuyến để gửi và nhận dữ liệu trực tiếp từ hiện trườn</span></span>g.<br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cài đặt nhanh chóng và thuận tiện</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả và giảm thời gian làm việc với Leica LS10, LS15. Sử dụng núm lấy nét để cài đặt nhanh chóng. Chuyển động tốt mang lại một hình ảnh hoàn hảo. LS10 & LS15 cung cấp cho bạn một mức độ bảo mật cao!</span></span><br /> <br /> <br /> <iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="394" src="https://www.youtube.com/embed/lBe6-DiokBQ" title="YouTube video player" width="700"></iframe>', 'images' => '20221227151040ffcdeffa3829f4a633ea0b404e2b4a0a.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình Leica', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '26500', 'slug' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '215', 'rght' => '216', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '635', 'name' => 'Ống nhòm và những lưu ý khi mua ống nhòm', 'code' => null, 'alias' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tìm hiểu về ống nhòm và tham khảo một số lưu ý khi chọn ống nhòm!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Ống nhòm là gì?</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm, còn gọi là ống ngắm hay con mắt xa, là một hệ hai kính viễn vọng quang học được gắn cạnh nhau và cùng hướng, cho phép người quan sát đặt cả hai mắt để quan sát các vật ở xa. Cấu tạo gồm vật kính, thị kính và thường có thêm hệ thống lăng kính. Vật kính bao gồm một thấu kính hội tụ, thị kính là thấu kính hội tụ có tiêu cự nhỏ nhất nhưng sẽ làm hình ảnh bị ngược nên cần thêm lăng kính đảo ảnh.<br /> <br /> * Cấu tạo ống nhòm gồm một hệ thống hai thấu kính hội tụ đặt đồng trục.</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vật kính L1: tiêu cự f1 rất dài (vài m)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thị kính L2: tiêu cự f2 ngắn (vài cm) và được sử dụng như kính lúp</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách giữa thị kính và vật kính thay đổi được.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Cấu tạo ống nhòm.png" style="width: 300px; height: 383px;" /><br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Tìm hiểu về các thông số về ống nhòm</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thường ta hay nhìn thấy ký hiệu 7×50, 8×40, 10×42, 15×70, 25×100… ở trên các ống nhòm. Hai chữ số này nói lên điều gì?<br /> <br /> <u>Ví dụ</u>: <span style="color:#000000;"><span style="text-align: justify;">Ống nhòm Nikon MONARCH 7 10x42</span></span><br /> <br /> <strong>10</strong> - số đằng trước dấu nhân (x) sẽ là độ phóng đại của ống nhòm đó (tức là 10 lần).<br /> <strong>42</strong> - số đằng sau dấu nhân sẽ là đường kính của vật kính ống nhòm theo đơn vị millimet ( tức là 42mm).<br /> <br /> Thông số độ phóng đại có nghĩa là bạn sẽ nhìn vật đó gần lại bạn 10 lần theo tỉ lệ xấp xỉ 1/10. Có nghĩa là bạn nhìn một vật xa 1km bằng ống nhòm, thì khi đó như bằng mắt thường bạn nhìn 100m.<br /> <br /> Nhiều bạn hay thắc mắc một câu hỏi khi mua ống nhòm: <strong>ống nhòm này nhìn bao xa?</strong> Thực chất cái xa vô cùng mà mình nói ở đây nó là một vật đủ lớn mà khi nhìn qua ống nhòm chúng ta có thể thấy nó và nhìn được hình dạng của nó. Điều quan trọng mà các bạn hay bỏ quên đó là ”chất lượng ảnh như thế nào?” thì rất ít bạn quan tâm. Đây là điều quan trọng để đánh giá một chiếc ống nhòm tốt hay không?</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường kính vật kính là thông số được tính bằng đơn vị mm. Nếu vật kính càng lớn thì khả năng thu sáng và chất lượng ảnh của bạn sẽ càng tốt và ngược lại. Tuy nhiên nếu mà lớn quá thì một trong những nhược điểm đó là ảnh quan sát thu được sẽ bị sai sắc (là điều không thể tránh khỏi). Bởi vậy khi lựa chọn mua ống nhòm thì các bạn nên chọn sao cho phù hợp với độ phóng đại ống nhòm mà mình mong muốn. Ví dụ 7×50, 8×40, 10×42, 10×50, 12×60, 15×70…</span></span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Xuất xứ tất cả các loại ống nhòm hiện nay</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm hiện nay có ba nguồn gốc xuất xứ chính, đó là tự lực sản xuất sản phẩm, OEM và ODM. Vậy những khái niệm này là gì?</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Những sản phẩm đến từ các thương hiệu tự lực sản xuất có nghĩa là ống nhòm của thương hiệu này được thiết kế và gia công bởi chính một đơn vị. Tuy nhiên hiện nay có khá ít thương hiệu có thể tự lực sản xuất được mà không nhờ bên thứ ba. Đối với những sản phẩm được tự lực sản xuất này thì sẽ mang đậm dấu ấn của thương hiệu và không bị ảnh hưởng bởi các yếu tố kỹ thuật từ các bên. Tuy nhiên những chiếc ống nhòm được tự lực sản xuất có giá thành khá cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm <strong>OEM</strong> là những chiếc ống nhòm được công ty chủ chủ quản thiết kế nhưng lại không trực tiếp gia công, mà phải nhờ đến một bên thứ 3. Đơn vị gia công sẽ hoàn thiện sản phẩm dựa trên bản thiết kế và chịu sự kiểm soát chất lượng từ đơn vị chủ quản thiết kế. Với hình thức này thì sản phẩm thường có giá thành rẻ hơn nhưng về dấu ấn thương hiệu của sản phẩm thì không nổi bật nhiều.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Và hình thức cuối cùng là sản phẩm <strong>ODM</strong>, những sản phẩm ống nhòm thường đến từ các thương hiệu có khả năng kinh doanh nhưng không có khả năng thiết kế hay gia công sản phẩm. Ống nhòm của những thương hiệu này sẽ được đặt thiết kế và gia công ở một đơn vị nào đó và in thương hiệu của mình lên.</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc xác định được nguồn gốc của sản phẩm cũng là cách chọn mua ống nhòm mà bạn nên lưu tâm. Mỗi thương hiệu đều có một ưu nhược điểm riêng, tùy vào nhu cầu bạn có thể lựa phương thức sản xuất phù hợp.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Phân loại các loại ống nhòm hiện nay theo chức năng</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường có rất nhiều loại ống nhòm khác nhau, dưới đây là một số loại ống nhòm phố biến được nhiều người lựa chọn nhất.<br /> - <strong>Ống nhòm mini</strong> là loại ống nhòm có kích thước gọn nhẹ đến bất ngờ, tuy nhiên tầm nhìn thì hơi hạn chế. Loại ống nhòm này có kích thước rất nhỏ nên có thể bỏ trong balo, túi xách để mang theo bên người, trong các chuyên tham quan, thám hiểm, du lịch.<br /> - <strong>Ống nhòm ban đêm</strong> là loại ống nhòm có khả năng nhìn xuyên bóng tối nhờ được trang bị đèn hồng ngoại. Hình ảnh nhìn được trong bóng tối qua ống nhòm hồng ngoại thường không màu. Ngoài ra, loại ống nhòm hồng ngoài ngày còn được tích hợp tích năng ghi hình, chụp ảnh.<br /> - <strong>Ống nhòm chụp ảnh</strong> là loại ống nhòm được tích hợp thêm chức năng bắt lại những khoảnh khắc đẹp khi chúng ta quan sát. Tuy nhiên, vì không phải là thiết bị chuyên về chụp ảnh nên hình ảnh chụp được có chất lượng còn hạn chế.<br /> - <strong>Ống nhòm đo khoảng cách</strong> là loại ống nhòm ngoài việc quan sát một đối tượng thì còn đo được khoảng cách từ chỗ chúng ta đứng đến vật thể. Ngoài ra, loại ống nhòm này còn được tích hợp tính năng đo góc, đo chiều cao<br /> - <strong>Ống nhòm nhiệt</strong> loại ống nhòm hiện đại có khả năng hiển thị thân nhiệt của đối tượng bạn đang quan sát, cũng như phân biệt được đối tượng với môi trường xung quanh nhờ sự chênh lệch nhiệt độ.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Một số lưu ý khi chọn ống nhòm phù hợp với nhu cầu</strong></span></span></h2> <p> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.1 Kích thước ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ống nhòm có kích thước lớn Full-Size (8x42, 10x50)<br /> Các dòng ống nhòm có kích thước lớn thường thu nhận ánh sáng tốt hơn, có thể xem và quan sát trong điều kiện ánh sáng yếu như lúc bình minh hay hoàng hôn. Các ống nhòm này sẽ cung cấp cho bạn cái nhìn rộng lớn về quang cảnh phía trước, thích hợp cho ngắm chim, động vật hoang dã,... nhưng ngược lại kích thước của chúng lại lớn và thường rất nặng.<br /> <br /> - Ống nhòm có kích thước trung bình Mid-Size (7x40, 16x32, 10x42)<br /> Các dòng ống nhòm có kích thước trung bình thường được sử dụng cho ngắm cảnh thiên nhiên, cho các hoạt động du lịch dã ngoại hoặc sử dụng để quan sát các buổi biểu diễn, xem các trận bóng đá,... Ống nhòm này có kích thước vừa phải, khả năng quan sát tốt, trọng lượng phù hợp với mọi người. Tuy nhiên mức độ truyền dẫn ánh sáng lại không được bằng ống nhòm có kích thước lớn.<br /> <br /> - Ống nhòm có kích thước nhỏ gọn - ống nhòm mini (6x18, 8x21)<br /> Các loại ống nhòm này thường thích hợp để sử dụng cho các hoạt động ban ngày. Đây là loại ống nhòm có kích thước nhỏ gọn, cầm vừa tay, thoải mái khi sử dụng trong thời gian dài.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/genmedia_PIC1739447_RL_02_w1500_h1500_c217224230255(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.2 Độ phóng đại của ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi ống nhòm thường được xác định bởi hai cặp số. Số đầu tiên chỉ độ phóng đại của ống nhòm và số thứ 2 thể hiện đường kính vật kính của ống nhòm. Ở đây ta thấy đối với ống nhòm có độ phóng đại lớn hình ảnh quan sát được sẽ càng gần hơn. Tuy nhiên, nếu bạn chọn ống nhòm có độ phóng đại quá lớn, ống nhòm siêu zoom thì kích thước lớn sẽ làm tăng độ rung khi tay bạn cầm không chắc dẫn đến hiện tượng mỏi mắt.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.3 Đường kính ống kính mục tiêu rộng</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giống như độ phóng đại, thông số thứ 2 của ống nhòm là về đường kính ống kính vật kính. Đường kính ống kính càng rộng cho phép tiếp nhận càng nhiều ánh sáng hơn. Khi nhiều ánh sáng bạn sẽ quan sát thấy hình ảnh tươi sáng hơn đặc biệt là trong điều kiện ánh sáng yếu như hoàng hôn hay lúc bình minh.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ong-nhom-hong-ngoai-2-mat-co-ghi-hinh-4x50mm-equinox-z_2253.png" style="width: 420px; height: 329px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.4 Thoát sinh học - Exit Pupil</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ thoát sinh học cho biết ảnh, độ sáng của vật thể khi đang quan sát. Nếu thông số này lớn sẽ làm cho hình ảnh quan sát được rõ nét hơn, tươi sáng hơn. Cách tính toán thông số này bằng cách lấy đường kính phóng đại chia cho độ phóng đại của ống kính. Nếu thông số này nằm ở ngưỡng 7 thì đó là ống kính tốt có thể lựa chọn để quan sát các vật trong ánh trời sáng trăng, lúc ánh sáng yếu, ở ngưỡng 5mm hoặc cao hơn sẽ thích hợp cho quan sát ban ngày hoặc ánh sáng yếu.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.5 Khoảng cách đặt mắt - Relief Eye</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Relief Eye là khoảng cách đặt mắt giữa thị kính tới mắt của bạn sao cho khả năng quan sát tốt nhất thoải mái nhất. Khoảng đặt mắt càng lớn bạn lại càng phải đưa ống nhòm ra xa hơn so với mắt mình, nhưng lại tốt đối với những người đeo kính (đối với những người đeo kính nên chọn thông số này là 11mm hoặc cao hơn).<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.6 Trường nhìn</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trường nhìn là thông số cho phép bạn biết độ rộng khu vực mình muốn quan sát tại khoảng cách 1000m từ nơi bạn đang đứng. Trường nhìn rộng để quan sát thiên nhiên, quan sát động vật, trường nhìn hẹp giúp quan sát các đối tượng ít di chuyển.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/nikon-coolshot-40-i-4(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.7 Hệ thống lấy nét</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm thường được trang bị hệ thống lấy nét ở trung tâm cho cả hai mắt, hoặc điều chỉnh diop trên cả hai mắt. Việc điều chỉnh diop trên hai mắt giúp bù đắp những hạn chế về thị lực giữa hai mắt của bạn.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.8 Lớp phủ thấu kính</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm giá rẻ thường không được tráng phủ nhiều lớp ra vậy cảm giác nhìn qua ống nhòm này thường mờ và không rõ nét. Lớp phủ thấu kính giúp giảm sự phản xạ ánh sáng và tăng khả năng truyền dẫn ánh sáng.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.9 Khả năng chống nước và kháng thời tiết</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng chống nước trên ống nhòm có thể là khả năng chịu nước, khả năng chống thấm, khi sử dụng ở điều kiện thời tiết thay đổi, nhiệt độ thay đổi.<br /> Các loại ống nhòm du lịch thường được trang bị khả năng chống nước mưa, ống nhòm quân sự, ống nhòm hải quân có thể được trang bị thêm khả năng chịu được áp lực nước hoặc nổi trên mặt nước.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.10 Khả năng chống đọng sương</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm giá rẻ thường bị mờ sương khi di chuyển qua lại giữa các vùng có nhiệt độ khác nhau. Mờ sương gây nhiều phiền toái cho bạn, thậm chí có thể làm hỏng ống nhòm nếu không loại bỏ độ ẩm đó ra khỏi ống nhòm.<br /> Hiện nay, các ống nhòm chuyên dụng, ống nhòm cao cấp đã được bơm các loại khí trơ, khí nitor bên trong ống nhòm để tránh gây hiện tượng ngưng tụ hơi nước. Điều này giúp bảo vệ ống nhòm của bạn tránh đọng sương lên bền mặt ống kính.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Địa chỉ mua ống nhòm/ ống nhòm đo khoảng cách uy tín</span></span></h2> <p id="2-dia-chi-mua-thiet-bi-may-bay-khong-nguoi-lai-uav-uy-tin" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại ống nhòm/ ống nhòm đo khoảng cách của các hãng Leica, Nikon, Barska, Garmin, Terrinox, Steiner, SNDWAY, ... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="color: rgb(51, 51, 51); text-align: justify;"> </span><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"> </span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span><br /> ', 'images' => '20210714155415df03af942339bf722676fd2f752f2a1f.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'ống nhòm đo khoảng cách', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-14', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24581', 'slug' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '213', 'rght' => '214', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '634', 'name' => 'Phụ kiện trắc địa', 'code' => null, 'alias' => 'phu-kien-trac-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Phụ kiện trắc địa là gì?</span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hầu hết những phụ kiện trắc địa đều thiết kế có thể tách rời với máy, phòng trong những trường hợp bị hư hỏng, chỉ phải thay thế phụ kiện mới. Điều này khiến cho việc lắp ráp phụ kiện cũng như sử dụng các máy trắc địa được linh hoạt với mọi trường hợp.<br /> Phụ kiện đo đạc, trắc địa bao gồm nhiều loại khác nhau ứng dụng cho các thiết bị đo đạc ( máy thủy bình, máy kinh vĩ điện tử, máy toàn đạc điện tử, máy định vị GPS) như: thước thép, bật mực, đế dọi tâm, thước đẩy bánh xe, mốc sứ, thùng máy, gương sào, đế dọi tâm, chân mia, dây cáp, pin sạc,…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/PHỤ KIỆN TRẮC ĐỊA(2).png" style="width: 680px; height: 544px;" /></span></span></p> <p style="text-align: center;"> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lưu ý khi lựa chọn phụ kiện trắc địa</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải đảm bảo phù hợp với cấu tạo của máy, chức năng của máy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải cùng hãng sản xuất hoặc phải là sản phẩm chính hãng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải phù hợp với công suất của máy, tránh trường hợp chọn phụ kiện có công suất thấp hoặc lớn hơn công suất thực của máy gây hư hỏng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải có cấu tạo tính năng tương đồng với từng đời máy</span></span></li> </ul> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Phụ kiện máy(2).jpg" style="width: 620px; height: 803px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Địa chỉ mua phụ kiện trắc địa uy tín</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại phụ kiện trắc địa: chân máy toàn đạc, chân máy thủy bình, mia 5m, mia Invar, sào gương, pin máy toàn đạc, sạc pin máy toàn đạc, đế máy, cáp trút số liệu,... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> </span><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 145 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"> </span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span></span></span>', 'images' => '20211207150823dc9ff8b8d2712352c76fd4e56030baca.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Phụ kiện trắc địa', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-12', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24887', 'slug' => 'phu-kien-trac-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '211', 'rght' => '212', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '632', 'name' => 'Một số lưu ý khi chọn mua máy bộ đàm', 'code' => null, 'alias' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng chúng tôi tham khảo một số lưu ý để lựa chọn cho mình một chiếc bộ đàm phù hợp nhé!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Lựa chọn băng tần sử dụng</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm cầm tay và máy bộ đàm cố định có 2 loại băng tần là VHF (136 – 174MHz) và UHF (400 – 527MHz).<br /> <br /> Nếu mua thêm để dùng chung với máy có sẵn, phải xác định máy bộ đàm đang dùng là loại băng tần nào (VHF hay UHF) và model là gì. Trong trường hợp đây là lần đầu tiên mua bộ đàm và chỉ có nhu cầu dùng chúng với nhau thì người dùng có thể chọn loại băng tần nào cũng được. Tùy thuộc vào địa hình, khu vực sử dụng và để đảm bảo liên lạc xa nhất, tốt nhất bạn nên chú ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ở vị trí khu vực trống trải, ít vật cản nên chọn băng tần VHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại khu vực nhà cao tầng, nhiều công trình dân dụng, trong thành phố nên chọn tần số UHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cũng cần lưu ý đến khả năng được cấp phép sử dụng tần số tại vùng sử dụng bộ đàm.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Lưu ý:</strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách liên lạc tối đa giữa hai máy cầm tay tại khu vực trống trải là khoảng 3km, trong thành phố không quá 2km. Những vị trí càng đông dân cư, càng nhiều công trình kiến trúc. Mật độ dân cư đông thì cự ly sẽ rút ngắn lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ đàm cầm tay có thể liên lạc với trung tâm của mình ở cự ly xa hơn so với cự ly giữa 2 máy cầm tay. Điều kiện là máy tại trung tâm phải có công suất lớn. Và anten đặt trên cột cao (càng cao thì liên lạc càng xa).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu muốn tăng cự li liên lạc giữa các máy với nhau, có thể chọn dùng Repeater (Bộ lặp) với anten lắp trên cao.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><img alt="" src="/admin/webroot/upload/image/images/1534383704-bodam_02.jpg" style="width: 480px; height: 360px;" /></strong></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Lựa chọn dòng máy phù hợp</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tùy thuộc vào khả năng tài chính cũng như nhu cầu mà lựa chọn dòng máy phù hợp. Trên thị trường hiện nay có khá nhiều thương hiệu máy bộ đàm. Nổi bật hơn cả là các dòng máy đến từ thương hiệu Motorola, Icom và Kenwood. Các dòng sản phẩm khác được đánh giá là có độ bền kém hơn, chất lượng thu phát cũng không tốt bằng.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu dùng cho công trường xây dựng hay dịch vụ bảo vệ thì nên chọn loại có cấu hình trung bình. Motorola CP1100, CP1300, GP3188 loại không bàn phím với khả năng kháng nước, chống bụi, chống va đập tốt là một gợi ý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các công ty vận tải, vận chuyển hàng hóa/hành khách…thì có thể chọn máy bộ đàm gắn xe cố định như Motorola GM3188, GM338. Nếu công ty yêu cầu đảm bảo quản lý liên lạc tại nhiều khu vực địa lý có khoảng cách xa thì phải chọn dòng máy kĩ thuật số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Với bộ đàm dùng cho nhà hàng, khách sạn, khu công nghiệp thì nên chọn dòng máy bộ đàm cầm tay giá rẻ như Motorola MagOne A8, GP2000s, Kenwood TK-2107 hay Icom IC-F3003 đều được.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các đơn vị chuyên nghiệp mà yêu cầu sản phẩm cần phải đảm bảo an ninh để liên lạc thông suốt kể cả trong điều kiện thời tiết khắc nghiệt, môi trường phức tạp như Công an, Bộ đội, phục vụ công tác Phòng chống thiên tai, bão lũ, các công ty dầu khí…bộ đàm được lựa chọn phải là dòng chuyên nghiệp, chuyên dụng và hiệu suất cao\</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm phổ thông có giá thành tương đối rẻ, cấu hình vừa đủ đáp ứng những yêu cầu đơn giản. Vừa hài hòa về chi phí, vừa mang lại hiệu quả công việc. Trong khi đó, các dòng sản phẩm chuyên nghiệp thường có mức giá cao hơn với nhiều tính năng hơn.<br /> <br /> Có thể nói, dòng sản phẩm máy bộ đàm đến từ thương hiệu Motorola hiện đang đứng đầu về công nghệ (cả analog và digital). Nhờ vào ưu điểm là độ bền cao, khả năng chống chịu tốt cũng như cách vận hành đơn giản. Các dòng sản phẩm chuyên dụng có thể kể đến như Motorola GP3188, GP328, XiR P8200/8208, P8260/8268…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/business-radios-2021.png" style="width: 480px; height: 238px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2 style="box-sizing: border-box; margin-top: 0px; margin-bottom: 0.5rem; font-weight: 500; line-height: 1.2; font-size: 20px; color: rgb(68, 68, 68); font-family: Roboto, sans-serif;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; font-weight: 600;">3. Lựa chọn máy bộ đàm với những tính năng phù hợp</span></span></span></h2> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát RF: Máy cầm tay thường có công suất tối đa khoảng 5W, con số này càng cao thì cự ly liên lạc càng lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất âm thanh: Nếu sử dụng trong môi trường ồn ào, nhiều tiếng động. Thì nên chọn máy công suất lớn có bộ lọc âm thanh tốt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các tính năng bảo vệ: Máy được thiết kế với kết cấu vững chắc, theo tiêu chuẩn quân đội Mỹ (MIL-STD810), chống nước, chống nổ…</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mạch mã hóa và giải mã PL/DPL, CTCSS/DTCS: Tránh được những cuộc liên lạc không cần thiết khi nhiều người dùng chung 1 kênh tần số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng kích phát bằng giọng nói (VOX) để hoạt động khi rảnh tay</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng nhập tần số từ bàn phím của máy: Thường được trang bị ở các dòng máy phổ thông. Tuy vậy, tính năng này lại khiến người dùng vô tình làm sai tần số kênh đã đặt ra khiến máy bộ đàm không liên lạc được với máy khác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng bảo mật thông tin: Nhiều cấp bảo mật khác nhau như Voice Scramler, AES/DES…</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/MotorolaG3588.jpg" style="width: 480px; height: 480px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Chọn phụ kiện bộ đàm</strong></span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin bộ đàm</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên chọn pin dung lượng lớn, thời gian sử dụng lâu cho mỗi lần sạc. Pin cho máy bộ đàm nên từ 1000mAh – 2200mAh với thời gian hoạt động tối đa đến 19 giờ.<br /> Pin Li-Ion có dung lượng lớn và tuổi thọ pin cao có thể sạc bất cứ lúc nào mà không cần dùng hết trước khi sạc như các loại pin khác. Pin Ni-MH có dung lượng và tuổi thọ pin thấp hơn Li-Ion. Muốn pin sử dụng bền lâu thì không thể sạc nhồi mà phải dùng hết trước khi sạc lại. Trong trường hợp dùng lâu, để tránh bị hết pin bất ngờ, hãy mua thêm pin dự phòng để đảm bảo liên lạc được thông suốt.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ sạc</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu không có thời gian sạc pin lâu, hãy sử dụng bộ sạc nhanh, nhanh hơn bộ sạc chuẩn từ 3-5 giờ.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Loa – Micro và các loại tai nghe choàng đầu, áp cổ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo liên lạc kể cả khi đeo máy thường xuyên ở thắt lưng, trên cầu vai/gắn trên cổ áo. Phù hợp với những ai thường xuyên dùng tay cho những công việc khác như bảo an, nhân viên phục vụ…<br /> Tai nghe choàng đầu và bộ áp cổ khi dùng với máy có chức năng kích phát bằng giọng nói (VOX) sẽ giúp rảnh tay hoàn toàn khi liên lạc bằng bộ đàm. Bộ áp cổ sẽ giúp âm thanh gửi đi trong hơn, không có tiếng ồn kể cả khi đang nói trong khu vực nhiều tiếng ồn.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm của mỗi hãng khác nhau đều kèm theo anten tiêu chuẩn, cho cự li liên lạc tốt nhất. Loại cải tiến kích có thước ngắn hơn giúp máy gọn và đỡ vướng víu. Anten không phù hợp có thể làm hư hỏng máy. Do vậy, nếu cần một anten mới, hãy chọn đúng mã số của loại kèm theo máy.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/bo-dam-motorola-gp-3588-plus(1).jpg" style="width: 480px; height: 270px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ mua máy bộ đàm uy tín</span></span></h2> <p> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên phân phối các loại máy bộ đàm của các hãng Motorola, Kenwood, Icom, Hypersia,... lâu năm uy tín trên toàn quốc.</span></p> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> <span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span></span></span><br style="margin: 0px; padding: 0px;" /> </p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">@ Luôn đồng hành cùng bạn!</strong><span style="margin: 0px; padding: 0px;"> </span></span></span></p> ', 'images' => '20210709160653d0336e3b94fd76fc2ef669058d11917a.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'máy bộ đàm', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-09', 'modified' => '2026-07-12', 'status' => '1', 'view' => '15419', 'slug' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '209', 'rght' => '210', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $detailNews = array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $setting = array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ) $tin_ft = array( (int) 0 => array( 'Post' => array( 'id' => '588', 'name' => 'Hướng dẫn mua hàng', 'code' => null, 'alias' => 'huong-dan-mua-hang', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p> <span style="color:#000000;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> </span></span><span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="line-height: 107%;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></span></span> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="color:#000000;">Quý khách có thể mua hàng theo những cách sau:</span></span></span><br /> </p> <p> <span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Cách 1: </strong>Đặt hàng trực tiếp tại mục ĐẶT HÀNG (Thêm vào giỏ hàng) trên website: </span></span><span style="font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><a href="https://maytracdiasaoviet.vn/" target="_blank"><span style="color:#000000;">https://tracdiathanhdat.vn/</span></a></span></span><span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;">.</span></span></p> <p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngay sau khi tiếp nhận thông tin đặt hàng, nhân viên kinh doanh công ty sẽ gọi điện cho quý khách để xác nhận đơn hàng và tiến hành giao hàng cho quý khách ngay trong ngày.</span></span></span></p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Cách 2: </strong>Đặt hàng trực tiếp qua số hotline của công ty <br /> <br /> – Tại trụ sở Hà Nội: <strong>0913 051 734 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">– Tại VPGD Hồ Chí Minh:<strong> 0904 925 936 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Cách 3: </strong>Quý khách mua hàng trực tiếp tại địa chỉ sau:<br /> <br /> <strong>CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></span></span></span><br /> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 145 Láng Hạ, Phường Láng Hạ, Hà Nội</span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> </div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rất mong được hợp tác với Quý khách hàng trên cả nước.<br /> <br /> Trân trọng!</span></span></span></div> ', 'images' => '202104071220058398ebc1b9cf669cf602eb8040be387a.jpg', 'images_multi' => '', 'pos' => '1', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Máy trắc địa chính hãng | RTK GNSS, máy toàn đạc, máy thủy bình – Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy RTK GNSS, máy toàn đạc, máy thủy bình, GPS cầm tay chính hãng. Tư vấn kỹ thuật – giao hàng toàn quốc. Trắc địa Thành Đạt – 0913 051 734', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '4244', 'slug' => 'huong-dan-mua-hang', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '143', 'rght' => '144', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '586', 'name' => 'Chính sách thanh toán', 'code' => null, 'alias' => 'chinh-sach-thanh-toan', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> <!--[if !supportLineBreakNewLine]--><!--[endif]--></span> </span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chúng tôi c</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">hấp nhận các hình thức thanh toán bằng tiền mặt, chuyển khoản theo đúng quy định pháp luật. </span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (22).png" style="width: 320px; height: 183px;" /></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Quý khách có thể chọn các phương thức thanh toán sau đây:</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">I. Thanh toán trực tiếp tại cửa hàng<br /> <br /> II. Thanh toán qua hình thức chuyển khoản</span></strong><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Thông tin tài khoản:</span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <strong style="color: rgb(0, 0, 0); margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"><em>Chủ tài khoản</em>: CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></p> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em style="margin: 0px; padding: 0px;"><strong>Số tài khoản</strong></em><em style="margin: 0px; padding: 0px;">: <strong>0611001648635</strong> tại Ngân hàng TMCP Ngoại thương Việt Nam, chi nhánh Ba Đình<br /> <br /> <strong>Nội dung chuyển khoản</strong>: Tên công ty - Thông tin sản phẩm đã mua – Số điện thoại người chuyển tiền</em></span></span></span><br /> <br /> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Sau khi chuyển khoản hãy thông báo lại cho chúng tôi để chúng tôi kiểm tra và xác nhận lại cho Quý khách.</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">III. Thanh toán khi nhân viên đến giao nhận hàng</span></strong></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66);"> <span style="color:#000000;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">Quý khách hàng thanh toán trực tiếp bằng tiền mặt cho nhân viên giao hàng của chúng tôi ngay khi kiểm tra và nhận hàng.<br /> <br /> Mọi phản hồi và thắc mắc về việc thanh toán, Quý khách liên hệ <strong>0942 288 388</strong> để được tư vấn.</span></font><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span></span></p> ', 'images' => '20210407122232bf3e6d52a68ca60f97fc6048b14e4acc.jpg', 'images_multi' => '', 'pos' => '2', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3881', 'slug' => 'chinh-sach-thanh-toan', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '139', 'rght' => '140', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '587', 'name' => 'Chính sách vận chuyển', 'code' => null, 'alias' => 'chinh-sach-van-chuyen', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><span style="font-family:verdana,geneva,sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></strong><br /> <br /> Chúng tôi hỗ trợ giao hàng toàn quốc cho Quý khách mua hàng tại hệ thống cửa hàng của chúng tôi.</span></span><br /> </div> <div> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">Sau khi nhận được thông tin đặt hàng chúng tôi sẽ lập tức xử lý đơn hàng và phản hồi lại thông tin cho khách hàng về việc thanh toán và giao nhận.<br /> <br /> <strong>> Thời gian giao hàng </strong><br /> <br /> - Trong vòng 24 giờ nếu địa điểm giao hàng <b style="color: rgb(74, 74, 74); box-sizing: border-box;">≤ 20 km</b> tính từ cửa hàng của chúng tôi.</span></span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Trong vòng 1-2 ngày nếu địa điểm giao hàng nằm trong phạm vi <b style="box-sizing: border-box">50 - 100 km</b> </span></span><span style="font-family: Arial, sans-serif;"><o:p></o:p></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">tính từ cửa hàng của chúng tôi.<br /> <br /> - Trong vòng 3-5 ngày</span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> nếu địa điểm giao hàng từ <strong>20</strong></span><b style="font-family: tahoma, geneva, sans-serif; font-size: 14px; box-sizing: border-box;">0 km</b><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> trở lên </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">tính từ cửa hàng của chúng tôi.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trước khi vận chuyển, bộ phận giao nhận sẽ liên lạc với Quý khách hàng để xác nhận khoảng thời gian và địa điểm giao hàng cụ thể.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">> Phí vận chuyển</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> sẽ được tính theo từng giá trị đơn hàng và được thoả thuận giữa hai bên ngay trước khi giao hàng. </span></p> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px;">Mọi thắc mắc liên quan đến việc giao hàng, Quý khách hàng liên hệ số điện thoại <strong>0942 288 388</strong> để được giải đáp và giải quyết kịp thời.<br /> <br /> Trân trọng!</span></span></span></p> </div> ', 'images' => '20210407122135505ddef64809ce7ee5f9db7cfdfd3e2e.jpg', 'images_multi' => '', 'pos' => '3', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3923', 'slug' => 'chinh-sach-van-chuyen', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '141', 'rght' => '142', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '585', 'name' => 'Chính sách đổi trả', 'code' => null, 'alias' => 'chinh-sach-doi-tra', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Chúng tôi hỗ trợ đổi trả sản phẩm trong vòng 07 ngày nếu lỗi phát sinh do nhà sản xuất.<br /> <br /> Trong thời gian đổi trả, Công ty CP Công nghệ và Thương mại Thành Đạt sẽ hỗ trợ cung cấp máy móc thay thế kịp thời để công việc khảo sát, đo đạc của Quý khách không bị gián đoạn. Chi phí vận chuyển cho việc đổi trả do hai bên tự thoả thuận.</span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">> Điều kiện đổi trả: </span></span></strong></span><br /> <ul> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm phải còn nguyên tem mác.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm bị lỗi do nhà sản xuất.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm không đúng như đơn đặt hàng.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lần đổi trả cho 1 sản phẩm là 1 lần</span></span></span></li> </ul> <br /> <div style="text-align: start;"> <span style="color:#000000;"><strong><span style="text-align: justify;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">> </span></font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Việc đổi trả sẽ không được chấp nhận nếu:</span> <span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"> </span></span></strong></span></div> <ul> <li> <span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Trong quá trình sử dụng sản phẩm Quý khách không tuân thủ các chỉ dẫn của Nhà sản xuất.</span></span></li> <li> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="text-align: justify;">S</span>ản phẩm bị trầy xước, không nguyên vẹn</span></span></span></li> </ul> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, chúng tôi cũng hỗ trợ đổi trả sản phẩm vì lý do chủ quan của Quý khách hàng ( muốn đổi sang sản phẩm cùng chủng loại nhưng khác về màu sắc, hãng sản xuất hay thông số kỹ thuật). Chi phí cho việc đổi trả này do Quý khách hàng chịu.</span></span><br /> <br /> <span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"><img alt="" src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/lien-he.jpg" style="margin: 0px; padding: 8px 0px; height: 36px; max-width: 100%; vertical-align: middle; border: 0px; opacity: 1; font-size: 13px; width: 38px;" /><span style="margin: 0px; padding: 0px; font-size: 13px;"> </span></strong></span></span><span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"> </strong></span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Liên hệ hotline <strong>0913 051 734</strong> để được tư vấn đổi trả theo đúng qui định.</span></span>', 'images' => '202104071223177d9b7f6e319f9fa90078c7c61ed9bd19.jpg', 'images_multi' => '', 'pos' => '4', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3915', 'slug' => 'chinh-sach-doi-tra', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '137', 'rght' => '138', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '583', 'name' => 'Chính sách bảo hành', 'code' => null, 'alias' => 'chinh-sach-bao-hanh', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="color: rgb(66, 66, 66); text-align: justify;">Tất cả các sản phẩm mua tại hệ thống cửa hàng của chúng tôi đều được bảo hành chính hãng theo quy định của nhà sản xuất. </span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(66, 66, 66); text-align: justify;">Chúng tôi hỗ trợ kỹ thuật 24/7 qua số hotline <strong>0913 051 734</strong> trong suốt quá trình Quý khách sử dụng sản phẩm.</span></span></span></div> <div> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">1. Sản phẩm được bảo hành miễn phí: </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm sẽ được bảo hành miễn phí nếu sản phẩm đó còn thời hạn bảo hành (được tính kể từ ngày mua hàng).</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Thời hạn bảo hành được ghi trên Tem Bảo Hành và theo quy định của từng Nhà sản xuất đối với tất cả các sự cố về mặt kỹ thuật.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Có Tem bảo hành trên sản phẩm.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi sản phẩm có sự cố kĩ thuật chúng tôi sẽ trực tiếp khắc phục sự cố tại cửa hàng hoặc thay mặt khách hàng mang sản phẩm tới Trung Tâm Bảo Hành của hãng.</span></span></li> </ul> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">2. Những trường hợp không được bảo hành (sửa chữa có tính phí): </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm đã quá thời hạn bảo hành hoặc không có Tem bảo hành trên máy.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hư hỏng do tác động cơ học làm rơi, vỡ, va đập, trầy xước, móp méo, ẩm ướt, hoen rỉ, chảy nước hoặc do hỏa hoạn, thiên tai gây nên.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hỏng do sử dụng không đúng cách, sử dụng sai điện áp quy định.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Tự ý tháo dỡ, sửa chữa sản phẩm</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span><br /> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"> </span></span></div> ', 'images' => '20210407123801c4049edabae0c54e2347c82e21413ec3.jpg', 'images_multi' => '', 'pos' => '5', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3646', 'slug' => 'chinh-sach-bao-hanh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '133', 'rght' => '134', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '584', 'name' => 'Chính sách bảo mật thông tin', 'code' => null, 'alias' => 'chinh-sach-bao-mat-thong-tin', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">1. Mục đích thu nhập thông tin cá nhân</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51);">Thông tin cá nhân mà chúng tôi thu thập bao gồm: họ tên, địa chỉ giao hàng, địa chỉ email, số điện thoại cố định, số điện thoại di động, cookies.</span></p> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Đối với các giao dịch thanh toán qua cổng thanh toán trực tuyến, Chúng tôi không lưu trữ thông tin số tài khoản, số thẻ ngân hàng của khách hàng, những thông tin này sẽ được cổng thanh toán lưu trữ để phục vụ việc đối soát giao dịch.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân khách hàng sẽ được sử dụng cho một hoặc tất cả các mục đích sau đây:</span></span></span></span> <ul style="margin: 0px; padding: 0px 0px 0px 15px;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Giao hàng cho quý khách đã mua hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông báo về việc giao hàng và hỗ trợ khách hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Cung cấp thông tin liên quan đến sản phẩm</span></span></span></span></li> </ul> </li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoài ra, chúng tôi sẽ sử dụng thông tin của quý khách cung cấp để hỗ trợ quản lý tài khoản khách hàng (nếu có); xác nhận và thực hiện các giao dịch tài chính liên quan đến các khoản thanh toán trực tuyến của quý khách;</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi không được phép thu nhập thông tin nếu khách hàng không tự nguyện, cũng không sử dụng phương thức thu thập thông tin khách hàng bằng các hình thức bất hợp pháp.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">2. Phạm vi sử dụng thông tin</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân thu thập được sẽ chỉ được sử dụng trong nội bộ công ty.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể chia sẻ tên và địa chỉ của quý khách cho dịch vụ chuyển phát nhanh có uy tín để giao hàng cho quý khách theo cam kết.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">3. Thời gian lưu trữ thông tin</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">Thông tin khách hàng được lưu trữ nội bộ cho đến khi có yêu cầu xóa thông tin từ phía khách hàng.</span></p> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Những người hoặc tổ chức có thể được tiếp cận với thông tin </span></span></h2> <br /> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng được tiếp cận với thông tin cá nhân của khách hàng thuộc một trong những trường hợp sau:</span></span><br /> </div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Nhân viên của Công ty Cổ phần Công nghệ và thương mại Thành Đạt</span></span></div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Các đối tác có ký hợp đồng thực hiện 1 phần dịch vụ của Công ty. Các đối tác này sẽ nhận được những thông tin theo thỏa thuận hợp đồng (có thể 1 phần hoặc toàn bộ thông tin tuy theo điều khoản hợp đồng) để tiến hành hỗ trợ người dùng sử dụng dịch vụ do Công ty cung cấp.</span></span></div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ của đơn vị thu thập và quản lý thông tin</span></span></h2> <div style="text-align: justify;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(bao gồm cách thức liên lạc để người tiêu dùng có thể hỏi về hoạt động thu thập, xử lý thông tin liên quan đến cá nhân mình)</span></span></em></div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ của đơn vị thu thập và quản lý thông tin:</span></span><br /> </div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Công ty Cổ phần Công nghệ và thương mại Thành Đạt </span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Địa chỉ: số 157 phố Đặng Văn Ngữ, P. Phương Liên, Q. Đống Đa, Tp. Hà Nội</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Điện thoại: 0243 7764930</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Email: tracdiathanhdat@gmail.com<span style="white-space: pre;"> </span></span></span></strong></div> </div> </div> <p style="text-align: justify;"> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Người dùng có thể gọi điện tới tổng đài hỗ trợ và chăm sóc khách hàng </span><strong style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify; margin: 0px; padding: 0px;">0949 322 456</strong><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để điều chỉnh hoặc xóa đi dữ liệu cá nhân của mình.</span><br /> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">6. Cam kết bảo mật thông tin cá nhân khách hàng</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Không bán, chia sẻ hay trao đổi thông tin cá nhân của khách hàng thu thập trên trang web cho một bên thứ ba nào khác.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoại trừ các trường hợp về sử dụng thông tin cá nhân như đã nêu trong chính sách này,chúng tôi cam kết không tiết lộ thông tin cá nhân của bạn ra ngoài. Trong một số trường hợp, chúng tôi có thể thuê một đơn vị độc lập để tiến hành các dự án nghiên cứu thị trường và khi đó thông tin của bạn sẽ được cung cấp cho đơn vị này để tiến hành dự án. Bên thứ ba này sẽ bị ràng buộc bởi một thỏa thuận về bảo mật mà theo đó họ chỉ được phép sử dụng những thông tin được cung cấp cho mục đích hoàn thành dự án.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể tiết lộ hoặc cung cấp thông tin cá nhân của bạn trong các trường hợp thật sự cần thiết như sau: (a) khi có yêu cầu của các cơ quan pháp luật; (b) trong trường hợp mà chúng tôi tin rằng điều đó sẽ giúp chúng tôi bảo vệ quyền lợi chính đáng của mình trước pháp luật.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">7. Thay đổi về chính sách</span></span></span></span></h2> <p style="text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Nội dung của “Chính sách bảo mật” này có thể thay đổi để phù hợp với các nhu cầu của Công Ty CP Công nghệ và Thương Mại Thành Đạt cũng như nhu cầu và sự phản hồi từ khách hàng (nếu có). </span></span></span></span></p> </div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi hiểu rằng quyền lợi của bạn trong việc bảo vệ thông tin cá nhân cũng chính là trách nhiệm của chúng tôi nên trong bất kỳ trường hợp có thắc mắc, góp ý nào liên quan đến chính sách bảo mật, việc thông tin cá nhân bị sử dụng sai mục đích vui lòng liên hệ qua số điện thoại <strong>0949 322 456</strong> hoặc gửi phản hồi về địa chỉ email: <em><strong>tracdiathanhdat@gmail.com.</strong></em><br /> <br /> Trân trọng!</span></span></div> ', 'images' => '202104071236589b665b2accf17da9077cea4c5dad8e94.jpg', 'images_multi' => '', 'pos' => '6', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3920', 'slug' => 'chinh-sach-bao-mat-thong-tin', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '135', 'rght' => '136', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) ) $slideshow = array( (int) 0 => array( 'Slideshow' => array( 'id' => '1158', 'name' => '', 'images' => '202607021457295d6b626c7966fea8ed15b90188f75e84.png', 'created' => '2026-07-02 14:57:29', 'modified' => '2026-07-02 14:57:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 1 => array( 'Slideshow' => array( 'id' => '1157', 'name' => '', 'images' => '20260630144106967d7220891508e0bc589157b72a4a6f.png', 'created' => '2026-06-30 14:41:06', 'modified' => '2026-06-30 14:41:06', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 2 => array( 'Slideshow' => array( 'id' => '1156', 'name' => '', 'images' => '20260627100900c4525d4b0ad85bb7ed6e5f31fbe008ce.png', 'created' => '2026-06-27 10:09:00', 'modified' => '2026-06-27 10:09:00', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 3 => array( 'Slideshow' => array( 'id' => '1153', 'name' => '', 'images' => '2026060910315463c4488ef0eebcd97a80c7be838ec857.png', 'created' => '2026-06-09 10:31:54', 'modified' => '2026-06-09 10:31:54', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 4 => array( 'Slideshow' => array( 'id' => '1151', 'name' => '', 'images' => '20260505105747cef035cfde3d3e4fc486dcc70906dab9.png', 'created' => '2026-05-05 10:57:47', 'modified' => '2026-05-05 10:57:47', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 5 => array( 'Slideshow' => array( 'id' => '1147', 'name' => '', 'images' => '20260504151401463305739b212edcd50d4df28ea21663.png', 'created' => '2026-05-04 15:14:01', 'modified' => '2026-05-04 15:14:01', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 6 => array( 'Slideshow' => array( 'id' => '1111', 'name' => '', 'images' => '2025091214412921cbc3cbc42d3d64fe4364ad8b7a9b7e.png', 'created' => '2025-09-12 14:41:29', 'modified' => '2025-09-12 14:41:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 7 => array( 'Slideshow' => array( 'id' => '1099', 'name' => '', 'images' => '20250707100715baf5ecd84c6a8766519b98f66eec1511.png', 'created' => '2025-07-07 10:07:15', 'modified' => '2025-07-07 10:07:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 8 => array( 'Slideshow' => array( 'id' => '1096', 'name' => '', 'images' => '202504251616158fbd912c821051db2e9e1ebe215c4da4.png', 'created' => '2025-04-25 16:16:15', 'modified' => '2025-04-25 16:16:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 9 => array( 'Slideshow' => array( 'id' => '1055', 'name' => '', 'images' => '202502071107533894de97e081b06e5749a83e6bed2399.png', 'created' => '2025-02-07 11:07:53', 'modified' => '2025-02-07 11:07:53', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 10 => array( 'Slideshow' => array( 'id' => '1008', 'name' => '', 'images' => '20240822084848c3089726a8fff539a5f1adcaaca9cd73.png', 'created' => '2024-08-22 08:48:48', 'modified' => '2024-08-22 08:48:48', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 11 => array( 'Slideshow' => array( 'id' => '961', 'name' => '', 'images' => '202403121029063cfd7328162ff668a881f7e275a1a01d.png', 'created' => '2024-03-12 10:29:08', 'modified' => '2024-03-12 10:29:08', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 12 => array( 'Slideshow' => array( 'id' => '850', 'name' => '', 'images' => '20230605160932d4a880ffcab96141d7a3538bf17255de.png', 'created' => '2023-06-05 16:09:33', 'modified' => '2023-12-25 09:27:46', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 13 => array( 'Slideshow' => array( 'id' => '817', 'name' => '', 'images' => '20230306160629b7490cbbbd5cfd081d8ec1930914a677.png', 'created' => '2023-03-06 16:06:29', 'modified' => '2025-12-23 09:03:28', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 14 => array( 'Slideshow' => array( 'id' => '617', 'name' => '', 'images' => '20220713143712ec1e28dc996e7d39d7535a730ead176e.png', 'created' => '2022-07-13 14:37:12', 'modified' => '2024-12-02 16:11:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ) ) $adv_khuyenmai = array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ) $doitac = array( (int) 0 => array( 'Advertisement' => array( 'id' => '36', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/bosch', 'images' => '20151223081939be7f9ca66f2fb4e760fb991d89d74002.png', 'display' => '3', 'created' => '2015-12-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '33', 'rght' => '34' ) ), (int) 1 => array( 'Advertisement' => array( 'id' => '33', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/pentax', 'images' => '20151216094854d7903c4f5ae6da9780bc88cbb048d417.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '27', 'rght' => '28' ) ), (int) 2 => array( 'Advertisement' => array( 'id' => '16', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/topcon', 'images' => '2015121609180430293457191c29e0d0d7a715d26041bd.png', 'display' => '3', 'created' => '2015-12-10', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '7', 'rght' => '8' ) ), (int) 3 => array( 'Advertisement' => array( 'id' => '27', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/trimple', 'images' => '2015121609470060450f77189189cce8edb27ef59c46d2.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '15', 'rght' => '16' ) ), (int) 4 => array( 'Advertisement' => array( 'id' => '28', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20151216094709d0c1b1d5ffcc17a598904261de69c485.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '17', 'rght' => '18' ) ), (int) 5 => array( 'Advertisement' => array( 'id' => '29', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/kenwood', 'images' => '201512160947288286f4b931bdbc0e64dfd484fc6c12e5.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '19', 'rght' => '20' ) ), (int) 6 => array( 'Advertisement' => array( 'id' => '30', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/nikon', 'images' => '202210171542300b1b7918f461a4dd8d877236543412d8.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '21', 'rght' => '22' ) ), (int) 7 => array( 'Advertisement' => array( 'id' => '34', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sincon', 'images' => '20151216095020f699fb43b225af9cb76ffe022e057faf.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '29', 'rght' => '30' ) ), (int) 8 => array( 'Advertisement' => array( 'id' => '31', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/garmin', 'images' => '201512160948147d3b76212a8ebdd03d45fc49a95a9868.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '23', 'rght' => '24' ) ), (int) 9 => array( 'Advertisement' => array( 'id' => '26', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/leica', 'images' => '20151216094654c3a83e015935188821aa9ee65e6b322f.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '13', 'rght' => '14' ) ), (int) 10 => array( 'Advertisement' => array( 'id' => '25', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sokkia', 'images' => '2015121609464772166f729226cebe52ae986c2699c3a1.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '11', 'rght' => '12' ) ), (int) 11 => array( 'Advertisement' => array( 'id' => '24', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/foif', 'images' => '2015121609482733afba0b93b9383e6ea26a08124e8a76.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '9', 'rght' => '10' ) ), (int) 12 => array( 'Advertisement' => array( 'id' => '54', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424094203a24f4d5a812351010a6355d888b944ec.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '57', 'rght' => '58' ) ), (int) 13 => array( 'Advertisement' => array( 'id' => '55', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '2021042409421996a13aed03c03b49b7d965db5dbcfdd6.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '59', 'rght' => '60' ) ), (int) 14 => array( 'Advertisement' => array( 'id' => '56', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/motorola', 'images' => '20220805103835e45b76131731a737df5e8dec49916375.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '61', 'rght' => '62' ) ), (int) 15 => array( 'Advertisement' => array( 'id' => '57', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/yamayo', 'images' => '20250304144532ee8e939d0c9e884e1a50ad352b272730.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2025-03-04', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '63', 'rght' => '64' ) ), (int) 16 => array( 'Advertisement' => array( 'id' => '58', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424100013ce6e6d048914eccdc312d53e64e566b7.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '65', 'rght' => '66' ) ), (int) 17 => array( 'Advertisement' => array( 'id' => '59', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/geomax', 'images' => '2021051416090922e7bec3a6dfe8041780aa125f5f4932.jpg', 'display' => '3', 'created' => '2021-05-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '67', 'rght' => '68' ) ), (int) 18 => array( 'Advertisement' => array( 'id' => '60', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/south', 'images' => '20210623100351b1da5960a28a9deb6af4e028880d625b.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '69', 'rght' => '70' ) ), (int) 19 => array( 'Advertisement' => array( 'id' => '62', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/e-survey', 'images' => '20211124221103bda9f65e28426fc1f93c4f5f223cd1bc.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-11-24', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '71', 'rght' => '72' ) ), (int) 20 => array( 'Advertisement' => array( 'id' => '68', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hi-target', 'images' => '2021112422134905fc59de564b69bfad9ca0b5f7204ffa.png', 'display' => '3', 'created' => '2021-08-05', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '73', 'rght' => '74' ) ), (int) 21 => array( 'Advertisement' => array( 'id' => '73', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/dji', 'images' => '2021102921504774fd5e8eec5eed69455accd89f7429e5.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '83', 'rght' => '84' ) ), (int) 22 => array( 'Advertisement' => array( 'id' => '74', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/spectra-geospatial-spectra-precision', 'images' => '202110292149162a2a919ea2a12b8255429f33eb51a1a8.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '85', 'rght' => '86' ) ), (int) 23 => array( 'Advertisement' => array( 'id' => '75', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/efix', 'images' => '202207131224432d602a710c7f1a152566aec421d281d7.png', 'display' => '3', 'created' => '2022-07-13', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '87', 'rght' => '88' ) ), (int) 24 => array( 'Advertisement' => array( 'id' => '76', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/chcnav', 'images' => '20220714162725db2138b3dcabb86eedc65c4ba1f6ccce.jpg', 'display' => '3', 'created' => '2022-07-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '89', 'rght' => '90' ) ), (int) 25 => array( 'Advertisement' => array( 'id' => '78', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202208051039345c0c28b21fe05a0c9d4f65b176fe7063.jpg', 'display' => '3', 'created' => '2022-08-05', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '93', 'rght' => '94' ) ), (int) 26 => array( 'Advertisement' => array( 'id' => '79', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202210171541561896d0eb31d272d3d99a9a8c0d3582fa.png', 'display' => '3', 'created' => '2022-10-17', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '95', 'rght' => '96' ) ), (int) 27 => array( 'Advertisement' => array( 'id' => '100', 'name' => null, 'link' => '', 'images' => '20230515143931e088ce1b8d5b9bcf57916a733e5ff5e3.jpg', 'display' => '3', 'created' => '2023-05-15', 'modified' => '2023-05-15', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '117', 'rght' => '118' ) ), (int) 28 => array( 'Advertisement' => array( 'id' => '107', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/bua-dung-cho-khao-sat-dia-chat-estwing-e3-22p.html', 'images' => '20240130151328303b311c40a2276c91bf7e4f0aa460ce.png', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '125', 'rght' => '126' ) ), (int) 29 => array( 'Advertisement' => array( 'id' => '108', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/ong-nhom-celestron-nature-dx-10-42.html', 'images' => '20240130151701574ebc151c3252c2eb93d6504efdc5ab.jpg', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '127', 'rght' => '128' ) ), (int) 30 => array( 'Advertisement' => array( 'id' => '114', 'name' => null, 'link' => '', 'images' => '20250917151944a9ff8314bd4af3bf87c9037dceceff53.png', 'display' => '3', 'created' => '2025-09-17', 'modified' => '2025-09-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '131', 'rght' => '132' ) ) ) $chayphai = array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ) $chaytrai = array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ) $chiasekinhnghiem = array() $list_menu_footer = array() $danhmuc_left_parent_sphot = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc_left_parent = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc = array( (int) 0 => array( 'Catproduct' => array( 'id' => '1', 'name' => 'Trang chủ', 'slug' => 'trang-chu' ) ), (int) 1 => array( 'Catproduct' => array( 'id' => '3', 'name' => 'Giới thiệu ', 'slug' => 'gioi-thieu' ) ), (int) 2 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ), (int) 3 => array( 'Catproduct' => array( 'id' => '5', 'name' => 'Phần mềm - HDSD ', 'slug' => 'phan-mem-hdsd' ) ), (int) 4 => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'slug' => 'kien-thuc-ung-dung' ) ), (int) 5 => array( 'Catproduct' => array( 'id' => '6', 'name' => 'Liên hệ', 'slug' => 'lien-he' ) ) ) $support = array( (int) 0 => array( 'Support' => array( 'id' => '13', 'name' => 'Co so Ha noi', 'phone' => '098 987 678', 'yahoo' => 'duycuong7640', 'skype' => 'duycuong7640', 'pos' => '0', 'created' => '2013-09-13', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ), (int) 1 => array( 'Support' => array( 'id' => '16', 'name' => 'Co so TP.HCM', 'phone' => '3252 436 432', 'yahoo' => 'duycuong7640', 'skype' => 'tuvantubep', 'pos' => '0', 'created' => '2014-01-15', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ) ) $content_for_layout = '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ' $scripts_for_layout = '' $count = (int) 0 $price = (int) 0 $sl = (int) 0 $cap1 = array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) $dm_c2 = array( (int) 0 => array( 'Catproduct' => array( 'id' => '64', 'name' => 'UAV/DRONE', 'parent_id' => '2', 'alias' => 'uav-drone', 'images' => '202401081512521957a61f2ef900e93835e8f9f7aeab18.png', 'lft' => '34', 'rght' => '35', 'pos' => '0', 'status' => '1', 'title_seo' => 'UAV/ Drone, máy bay không người lái', 'meta_key' => 'UAV', 'meta_des' => 'Là công ty chuyên nhập khẩu, cung cấp máy bay không người lái UAV/ Drone chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2022-03-24', 'modified' => '2024-01-08', 'slug' => 'uav-drone', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Catproduct' => array( 'id' => '69', 'name' => 'Laser SCANNER/Layout Navigator', 'parent_id' => '2', 'alias' => 'laser-scanner-layout-navigator', 'images' => '20240108152018614d9162875c6961b48a1567b62fd41d.png', 'lft' => '36', 'rght' => '37', 'pos' => '0', 'status' => '1', 'title_seo' => 'Trắc địa Thành Đạt chuyên cung cấp và chuyển giao công nghệ các loại máy đo đạc, trắc địa phục vụ khảo sát thiết kế, xây dựng và đo vẽ bản đồ của các hãng nổi tiếng trên thế giới như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, GLUNZ, TRIMPLE, SPECTRA, GEOMAX, GARMIN,...', 'meta_key' => 'Laser scanner, Layout Navigator', 'meta_des' => 'Là công ty chuyên nhập khẩu, cung cấp máy định vị điểm chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2022-12-05', 'modified' => '2025-01-14', 'slug' => 'laser-scanner-layout-navigator', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Catproduct' => array( 'id' => '7', 'name' => 'Máy toàn đạc điện tử', 'parent_id' => '2', 'alias' => 'may-toan-dac-dien-tu', 'images' => '202401081516562d6c3e4023165b5a99515b9bf87cb41d.png', 'lft' => '4', 'rght' => '5', 'pos' => '1', 'status' => '1', 'title_seo' => 'Máy toàn đạc là gì? Báo giá & cách chọn máy toàn đạc phù hợp!', 'meta_key' => '', 'meta_des' => 'Máy toàn đạc điện tử chính hãng Leica, Topcon, Nikon – giá tốt, hỗ trợ kỹ thuật tận nơi. Tư vấn chọn máy phù hợp công trình ngay hôm nay!', 'created' => '2015-12-02', 'modified' => '2026-04-18', 'slug' => 'may-toan-dac-dien-tu', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => 'May toan dac dien tu', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => 'Máy toàn đạc điện tử là thiết bị đo đạc trắc địa quan trọng, được sử dụng phổ biến trong xây dựng, khảo sát địa hình và bố trí công trình với độ chính xác cao. Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy toàn đạc chính hãng từ Leica, Topcon, Nikon…, hỗ trợ kỹ thuật tận nơi, phù hợp cho nhiều loại công trình từ dân dụng đến dự án lớn.', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Catproduct' => array( 'id' => '8', 'name' => 'Máy kinh vĩ điện tử', 'parent_id' => '2', 'alias' => 'may-kinh-vi-dien-tu', 'images' => '2024010815204855ce9983bd34eb588124dc84b353f5b2.png', 'lft' => '6', 'rght' => '7', 'pos' => '2', 'status' => '1', 'title_seo' => 'may kinh vi, máy kinh vĩ, máy kinh vĩ điện tử', 'meta_key' => 'Máy kinh vĩ tại Hà Nội, Máy kinh vĩ điện tử chính hãng', 'meta_des' => 'Máy kinh vĩ điện tử còn gọi là máy kinh vĩ số DT (Digital Theodolite). Máy kinh vĩ là loại dụng cụ đo lường các góc mặt bằng và góc đứng trong không gian. Chúng được dùng phổ biến trong điều tra khảo sát thực địa. Là công ty chuyên nhập khẩu, cung cấp máy kinh vĩ các loại chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2015-12-02', 'modified' => '2024-01-08', 'slug' => 'may-kinh-vi-dien-tu', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Catproduct' => array( 'id' => '9', 'name' => 'Máy kinh vĩ quang cơ', 'parent_id' => '2', 'alias' => 'may-kinh-vi-quang-co', 'images' => '202106091707040312c4b8f08be04fc109109fba92a7b0.jpg', 'lft' => '8', 'rght' => '9', 'pos' => '3', 'status' => '1', 'title_seo' => 'may kinh vi, máy kinh vĩ', 'meta_key' => 'may kinh vi, máy kinh vĩ chính hãng tại Hà Nội', 'meta_des' => 'Máy kinh vĩ là loại dụng cụ đo lường các góc mặt bằng và góc đứng trong không gian. Chúng được dùng phổ biến trong điều tra khảo sát thực địa', 'created' => '2015-12-02', 'modified' => '2024-01-08', 'slug' => 'may-kinh-vi-quang-co', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Catproduct' => array( 'id' => '10', 'name' => 'Máy thủy bình tự động', 'parent_id' => '2', 'alias' => 'may-thuy-binh-tu-dong', 'images' => '20240108152516627905f21b5ae408516847694d6bf571.png', 'lft' => '10', 'rght' => '11', 'pos' => '4', 'status' => '1', 'title_seo' => 'Máy Thủy Bình Tự Động Pentax, Nikon, Sokkia, Leica, Topcon – Chính Hãng, Giá Tốt', 'meta_key' => '', 'meta_des' => 'Máy thủy bình tự động chính hãng Pentax, Nikon, Sokkia, Leica, Topcon, Sokkia… độ chính xác cao, phù hợp mọi công trình. Giá tốt, tư vấn chọn máy chuẩn nhu cầu. Liên hệ Trắc Địa Thành Đạt để được hỗ trợ nhanh 24/7!', 'created' => '2015-12-02', 'modified' => '2026-04-18', 'slug' => 'may-thuy-binh-tu-dong', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => 'Máy thủy bình tự động là thiết bị đo cao độ phổ biến trong trắc địa và xây dựng, giúp xác định chênh cao với độ chính xác cao và thao tác nhanh ngoài công trường. Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy thủy bình chính hãng từ Penatx, Nikon, Sokkia, Leica, Topcon, Sokkia… phù hợp từ công trình dân dụng đến dự án yêu cầu độ chính xác cao. ', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Catproduct' => array( 'id' => '11', 'name' => 'Máy thủy bình điện tử', 'parent_id' => '2', 'alias' => 'may-thuy-binh-dien-tu', 'images' => '20240108152655355622b7e39186c76b1c8d7c90d8d67b.png', 'lft' => '12', 'rght' => '13', 'pos' => '5', 'status' => '1', 'title_seo' => 'may thuy binh dien tu, máy thủy bình điện tử, máy thủy bình điện tử Leica, Nikon, Topcon, Sokkia, Trimple', 'meta_key' => 'may thuy binh dien tu, máy thủy bình điện tử, máy thủy bình điện tử Leica, Nikon, Topcon, Sokkia, Trimple chính hãng tại Việt Nam', 'meta_des' => 'Máy thủy bình điện tử là loại máy sử dụng tia hồng ngoại để đọc những số liệu cần đo đạc, rồi tự động tính toán theo các phép tính mà người sử dụng lựa chọn. Cuối cùng, kết quả sẽ hiển thị trên màn hình LCD. Các dữ liệu tính toán và đo đạc được lưu trữ ở bộ nhớ trong của máy. Hoặc có thể chuyển qua máy tính để xử lý các số liệu mà người sử dụng cần. ', 'created' => '2015-12-02', 'modified' => '2024-01-08', 'slug' => 'may-thuy-binh-dien-tu', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Catproduct' => array( 'id' => '16', 'name' => 'Máy thủy bình laser', 'parent_id' => '2', 'alias' => 'may-thuy-binh-laser', 'images' => '2024010815374917fb38b64f9f6f9f2d1bc004b3e3e59c.png', 'lft' => '22', 'rght' => '23', 'pos' => '6', 'status' => '1', 'title_seo' => 'Máy thủy bình laser chính hãng giá rẻ tại Hà Nội, may thuy binh laser, may laser, máy laser giá rẻ, máy laser Bosch, máy laser Leica', 'meta_key' => 'Máy thủy bình laser chính hãng giá rẻ tại Hà Nội, may thuy binh laser, may laser, máy laser giá rẻ, máy laser Bosch, máy laser Leica', 'meta_des' => 'Chuyên nhập khẩu, cung cấp máy laser chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2015-12-09', 'modified' => '2024-02-28', 'slug' => 'may-thuy-binh-laser', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Catproduct' => array( 'id' => '17', 'name' => 'Máy đo khoảng cách laser', 'parent_id' => '2', 'alias' => 'may-do-khoang-cach-laser', 'images' => '2024010815293974051a0f3faad4fe0033fe98318caed8.png', 'lft' => '24', 'rght' => '25', 'pos' => '6', 'status' => '1', 'title_seo' => 'Máy Đo Khoảng Cách Laser chính hãng giá rẻ', 'meta_key' => 'Máy Đo Khoảng Cách Laser, Máy Đo Khoảng Cách Laser chính hãng, May do khoang cach laser, May do khoang cach laser chinh hang, May do khoang cach', 'meta_des' => 'Là công ty chuyên nhập khẩu, cung cấp máy đo khoảng cách laser chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2015-12-09', 'modified' => '2024-01-08', 'slug' => 'may-do-khoang-cach-laser', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => 'May do khoang cach laser', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Catproduct' => array( 'id' => '13', 'name' => 'Máy RTK', 'parent_id' => '2', 'alias' => 'may-rtk', 'images' => '20240108152853b1305732e016ad5c534f8371d76c092b.png', 'lft' => '16', 'rght' => '17', 'pos' => '7', 'status' => '1', 'title_seo' => 'Máy GPS RTK GNSS chính hãng | Esurvey, CHCNAV, Meridian, Geomate, Leica | Trắc Địa Thành Đạt', 'meta_key' => '', 'meta_des' => 'Máy GPS RTK GNSS chính hãng Esurvey, CHCNAV, Meridian, Geomate, Leica. Độ chính xác centimet, hỗ trợ kỹ thuật 24/7, giao hàng toàn quốc. Hotline 0913 051 734.', 'created' => '2015-12-02', 'modified' => '2026-07-04', 'slug' => 'may-rtk', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => 'Máy RTK GNSS là thiết bị đo đạc trắc địa hiện đại, được sử dụng rộng rãi trong các công trình xây dựng, khảo sát địa hình và định vị chính xác cao ngoài thực địa. Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy RTK chính hãng, hỗ trợ kỹ thuật tận nơi, phù hợp cho nhiều nhu cầu từ công trình dân dụng đến dự án lớn.', 'display' => '0', 'content_eng' => null ) ), (int) 10 => array( 'Catproduct' => array( 'id' => '19', 'name' => 'Máy định vị GPS cầm tay', 'parent_id' => '2', 'alias' => 'may-dinh-vi-gps-cam-tay', 'images' => '20240108153154a6b2faa25954f0bdc29b481c798007e7.png', 'lft' => '26', 'rght' => '27', 'pos' => '7', 'status' => '1', 'title_seo' => 'máy định vị GPS cầm tay, may GPS cam tay, Máy GPS Garmin', 'meta_key' => 'máy định vị GPS cầm tay, may GPS cam tay, Máy GPS Garmin chính hãng', 'meta_des' => 'Chuyên nhập khẩu, cung cấp máy GPS cầm tay Garmin chính hãng Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2015-12-10', 'modified' => '2024-01-08', 'slug' => 'may-dinh-vi-gps-cam-tay', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 11 => array( 'Catproduct' => array( 'id' => '14', 'name' => 'Máy thông tầng', 'parent_id' => '2', 'alias' => 'may-thong-tang', 'images' => '2024010816025097a2e124175b25dae1b26701340708c7.png', 'lft' => '18', 'rght' => '19', 'pos' => '8', 'status' => '1', 'title_seo' => 'máy thông tầng, máy chiếu đứng, may chieu dung, Foif,', 'meta_key' => 'Máy thông tầng, máy chiếu đứng, may chieu dung, Foif,', 'meta_des' => 'Chuyên cung cấp máy chiếu đứng các loại. Cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2015-12-02', 'modified' => '2024-01-19', 'slug' => 'may-thong-tang', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 12 => array( 'Catproduct' => array( 'id' => '15', 'name' => 'Máy bộ đàm', 'parent_id' => '2', 'alias' => 'may-bo-dam', 'images' => '20240108153715f990518da54698e33be2ea01d6b75f59.png', 'lft' => '20', 'rght' => '21', 'pos' => '8', 'status' => '1', 'title_seo' => 'máy bộ đàm, may bo dam, máy bộ đàm Kenwood, máy bộ đàm Motorola, may bo dam chinh hang', 'meta_key' => 'máy bộ đàm, may bo dam, máy bộ đàm Kenwood, máy bộ đàm Motorola, may bo dam chinh hang, máy bộ đàm chính hãng tại Việt Nam', 'meta_des' => 'Chuyên nhập khẩu, cung cấp máy bộ đàm chính hãng các loại, Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2015-12-02', 'modified' => '2024-01-08', 'slug' => 'may-bo-dam', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 13 => array( 'Catproduct' => array( 'id' => '51', 'name' => 'Thước đo các loại', 'parent_id' => '2', 'alias' => 'thuoc-do-cac-loai', 'images' => '202401081540347d3b76212a8ebdd03d45fc49a95a9868.png', 'lft' => '32', 'rght' => '33', 'pos' => '10', 'status' => '1', 'title_seo' => 'thước thép, thước Yamayo, thuoc thep, thước đo sâu, thuoc do sau', 'meta_key' => 'thước thép, thước Yamayo, thuoc thep, thước đo sâu, thuoc do sau chính hãng tại Việt Nam ', 'meta_des' => 'Chuyên nhập khẩu, cung cấp thước đo các loại chính hãng, Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2021-03-25', 'modified' => '2024-01-08', 'slug' => 'thuoc-do-cac-loai', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 14 => array( 'Catproduct' => array( 'id' => '50', 'name' => 'Ống nhòm - Ống nhòm đo khoảng cách', 'parent_id' => '2', 'alias' => 'ong-nhom-ong-nhom-do-khoang-cach', 'images' => '20240108154447aa6b0fa969e5b4b7e097ef929cddbc0b.png', 'lft' => '30', 'rght' => '31', 'pos' => '11', 'status' => '1', 'title_seo' => 'ống nhòm, ống nhòm đo khoảng cách, ong nhom gia re, ống nhòm chính hãng, ống nhòm golf', 'meta_key' => 'ống nhòm, ống nhòm đo khoảng cách, ong nhom gia re, ống nhòm chính hãng, ống nhòm golf chính hãng', 'meta_des' => 'Chuyên cung cấp ống nhòm, ống nhòm đo khoảng cách chính hãng giá rẻ tại Hà Nội. Trắc đia Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2021-03-25', 'modified' => '2024-01-08', 'slug' => 'ong-nhom-ong-nhom-do-khoang-cach', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 15 => array( 'Catproduct' => array( 'id' => '12', 'name' => 'Phụ kiện trắc địa', 'parent_id' => '2', 'alias' => 'phu-kien-trac-dia', 'images' => '2024010815484273190bae8513cd20f76eb5a6816de822.png', 'lft' => '14', 'rght' => '15', 'pos' => '12', 'status' => '1', 'title_seo' => 'phụ kiện trắc địa, phu kien trac dia, chân máy, chân máy toàn đạc, chân thủy bình, pin GPS, pin sạc RTK, pin máy toàn đạc điện tử, mia, gương sào, gường Leica, gương Topcon, gương Nikon, sào gương', 'meta_key' => 'phụ kiện trắc địa, phu kien trac dia, chân máy, chân máy toàn đạc, chân thủy bình, pin GPS, pin sạc RTK, pin máy toàn đạc điện tử, mia, gương sào, gường Leica, gương Topcon, gương Nikon, sào gương chính hãng', 'meta_des' => 'Chuyên cung cấp phụ kiện trắc địa các loại: mia, chân toàn đạc, chân thủy bình, sạc pin RTK, sạc pin máy toàn đạc, gương sào,.... Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2015-12-02', 'modified' => '2024-01-08', 'slug' => 'phu-kien-trac-dia', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => 'Equipments', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 16 => array( 'Catproduct' => array( 'id' => '47', 'name' => 'Sản phẩm khác', 'parent_id' => '2', 'alias' => 'san-pham-khac', 'images' => '2024010816004972262bc63fc2344d41a2a0d35c8176a7.png', 'lft' => '28', 'rght' => '29', 'pos' => '14', 'status' => '1', 'title_seo' => 'địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,..', 'meta_key' => 'địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,..', 'meta_des' => 'Chuyên cung cấp địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,.. Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2016-01-25', 'modified' => '2024-01-08', 'slug' => 'san-pham-khac', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) ) $cap2 = array( 'Catproduct' => array( 'id' => '45', 'name' => 'Dịch vụ thuê máy', 'parent_id' => '3', 'alias' => 'dich-vu-thue-may', 'images' => '', 'lft' => '42', 'rght' => '43', 'pos' => '2', 'status' => '1', 'title_seo' => '', 'meta_key' => '', 'meta_des' => '', 'created' => '2016-01-21', 'modified' => '2016-01-21', 'slug' => 'dich-vu-thue-may', 'cate' => '4', 'link' => 'gioi-thieu', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) $dm_c3 = array()include - APP/View/Elements/menu.ctp, line 56 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::element() - CORE/Cake/View/View.php, line 424 include - APP/View/Layouts/home.ctp, line 169 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::renderLayout() - CORE/Cake/View/View.php, line 539 View::render() - CORE/Cake/View/View.php, line 483 Controller::render() - CORE/Cake/Controller/Controller.php, line 957 ProductController::chitiet() - APP/Controller/ProductController.php, line 135 ReflectionMethod::invokeArgs() - [internal], line ?? Controller::invokeAction() - CORE/Cake/Controller/Controller.php, line 485 Dispatcher::_invoke() - CORE/Cake/Routing/Dispatcher.php, line 186 Dispatcher::dispatch() - CORE/Cake/Routing/Dispatcher.php, line 161 [main] - APP/webroot/index.php, line 92
Notice (8): Undefined index: name_eng [APP/View/Elements/menu.ctp, line 56]Code Context<div class="accordion-heading"><a class="accordion-toggle" <?php if(!empty($dm_c2)){?>data-toggle="collapse" data-parent="#accordion2" href="#collapse<?php echo $cap1['Catproduct']['id'];?>" title="<?php echo $cap1['Catproduct']['name'.LANGUAGE];?>"<?php }else{?>href="<?php echo DOMAIN.$cap1['Catproduct']['slug'];?>"<?php }?>><?php echo $cap1['Catproduct']['name'.LANGUAGE];?>$viewFile = '/home/tracdiathanhda/domains/tracdiathanhdat.vn/public_html/app/View/Elements/menu.ctp' $dataForView = array( 'cat12' => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'description_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'keywords_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'title_for_layout' => 'Máy kinh vĩ', 'tinmoiup' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'tinlq' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'detailNews' => array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'setting' => array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ), 'tin_ft' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'slideshow' => array( (int) 0 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 1 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 2 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 3 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 4 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 5 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 6 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 7 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 8 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 9 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 10 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 11 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 12 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 13 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 14 => array( 'Slideshow' => array( [maximum depth reached] ) ) ), 'adv_khuyenmai' => array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ), 'doitac' => array( (int) 0 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 1 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 2 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 3 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 4 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 5 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 6 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 7 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 8 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 9 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 10 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 11 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 12 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 13 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 14 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 15 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 16 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 17 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 18 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 19 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 20 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 21 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 22 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 23 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 24 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 25 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 26 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 27 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 28 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 29 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 30 => array( 'Advertisement' => array( [maximum depth reached] ) ) ), 'chayphai' => array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ), 'chaytrai' => array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ), 'chiasekinhnghiem' => array(), 'list_menu_footer' => array(), 'danhmuc_left_parent_sphot' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc_left_parent' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'support' => array( (int) 0 => array( 'Support' => array( [maximum depth reached] ) ), (int) 1 => array( 'Support' => array( [maximum depth reached] ) ) ), 'content_for_layout' => '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ', 'scripts_for_layout' => '' ) $cat12 = array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $description_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $keywords_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $title_for_layout = 'Máy kinh vĩ' $tinmoiup = array( (int) 0 => array( 'Post' => array( 'id' => '823', 'name' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật – Những bước quan trọng để đảm bảo độ chính xác', 'code' => null, 'alias' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-–-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập trạm Base RTK đúng cách có quan trọng không? Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Thiết lập trạm Base RTK đúng cách có quan trọng không?<br /> <br /> Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.<br /> <br /> Mặc dù giao diện phần mềm của mỗi hãng có thể khác nhau, quy trình thiết lập Base nhìn chung đều tuân theo các nguyên tắc giống nhau. Dưới đây là các bước cơ bản giúp triển khai một trạm Base RTK ổn định và đáng tin cậy.</em><br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7881291487147_f174a50258d6ad97ccd34f717df81a2b.jpg" style="width: 800px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Chọn vị trí đặt Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quan trọng nhất trước khi bật máy. Một vị trí tốt nên đáp ứng các điều kiện sau:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thoáng, có góc quan sát bầu trời rộng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh cây lớn, mái che hoặc công trình cao tầng che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế đặt gần tường kính, mái tôn hoặc mặt nước để giảm hiện tượng phản xạ tín hiệu (Multipath).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh gần đường dây điện cao thế hoặc nguồn phát sóng mạnh nếu có thể.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nền đất hoặc mặt bằng ổn định, ít rung động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu đặt Base trên mốc khống chế, cần đảm bảo mốc không bị xê dịch trong suốt quá trình đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lắp chân máy và định tâm</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi chọn vị trí phù hợp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở chân máy chắc chắn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều chỉnh chiều cao thuận tiện cho việc thao tác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định tâm chính xác trên mốc bằng dọi quang học hoặc dọi laser (nếu có).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng bọt thủy theo hướng dẫn của thiết bị.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trường hợp sử dụng chân máy thông thường ngoài hiện trường, nên kiểm tra lại việc định tâm sau khi siết chặt các khóa chân máy vì quá trình thao tác có thể làm lệch vị trí ban đầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Đo chiều cao anten</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten là một thông số rất quan trọng. Thông thường, phần mềm sẽ yêu cầu người dùng nhập:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao nghiêng (Slant Height), hoặc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao đứng (Vertical Height).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần đo đúng theo phương pháp mà phần mềm yêu cầu.<br /> <br /> > Một số lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng thước chuyên dụng nếu có.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo ít nhất hai lần để kiểm tra.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại đơn vị (mét hoặc milimét).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không ước lượng bằng mắt.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc nhập sai chiều cao anten sẽ làm sai tọa độ của trạm Base và có thể ảnh hưởng đến toàn bộ dữ liệu hiệu chỉnh RTK.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Thiết lập tọa độ Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quyết định hệ quy chiếu mà Rover sẽ sử dụng. <br /> <br /> 4.1 Trường hợp 1: Base đặt trên điểm đã biết tọa độ (<strong>Known Point</strong>)<br /> <br /> Đây là phương pháp được ưu tiên. Người dùng nhập chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X, Y, H hoặc B, L, H.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ tọa độ tương ứng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi xác nhận, Base sẽ phát dữ liệu hiệu chỉnh dựa trên tọa độ đã biết.<br /> <br /> > Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ tin cậy cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với đo địa chính, khảo sát công trình, hoàn công và các công việc yêu cầu liên kết với hệ tọa độ hiện có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 4.2 Trường hợp 2: <strong>Base Here</strong> (Base tự xác định tọa độ)<br /> <br /> Nếu chưa có mốc khống chế, người dùng có thể để máy tự xác định vị trí hiện tại (Base Here hoặc Autonomous).<br /> Phương pháp này thường được sử dụng khi:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát sơ bộ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập lưới khống chế tạm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình chưa yêu cầu liên kết với hệ tọa độ chính thức.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu ý rằng tọa độ Base Here chỉ mang tính tương đối. Nếu cần liên kết với hệ tọa độ công trình hoặc VN-2000, nên đo khống chế hoặc sử dụng các phương pháp chuyển đổi phù hợp trước khi triển khai chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cấu hình truyền dữ liệu cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Base có tọa độ, cần cấu hình phương thức truyền dữ liệu hiệu chỉnh đến Rover. Hai phương thức phổ biến hiện nay là:<br /> <br /> <strong>5.1 Truyền bằng Radio UHF</strong><br /> <br /> Khi dùng phương thức này cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tần số phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Băng thông (Bandwidth).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao thức truyền (Protocol).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten UHF đã được lắp đúng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base và Rover phải sử dụng cùng cấu hình để có thể liên lạc.<br /> <br /> <strong>5.2 Truyền qua Internet (NTRIP)</strong><br /> <br /> Trong trường hợp sử dụng mạng Internet nội bộ hoặc triển khai Base riêng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra kết nối 4G/5G hoặc Wi-Fi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra địa chỉ IP hoặc Caster.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Port.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mountpoint.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tài khoản và mật khẩu nếu có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Kiểm tra trạng thái phát cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi hoàn tất cấu hình, cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base đã bắt đủ số lượng vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đã bắt đầu phát dữ liệu cải chính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không xuất hiện cảnh báo lỗi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radio hoặc Internet hoạt động ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin hoặc nguồn ngoài đủ cho thời gian làm việc.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các hệ thống Radio, nên kiểm tra thêm cường độ tín hiệu giữa Base và Rover trước khi bắt đầu đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Kiểm tra Rover đã FIX ổn định</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Rover kết nối với Base, không nên đo ngay. <br /> <br /> Nên kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm đạt FIX.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lượng vệ tinh ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PDOP ở mức phù hợp.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Age of Correction thấp và ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số RMS hoặc Estimated Precision nằm trong giới hạn cho phép của công việc.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu Rover liên tục chuyển giữa FIX và FLOAT, cần kiểm tra lại:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách đến Base.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu Radio hoặc Internet.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình truyền dữ liệu.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Một số lỗi thường gặp khi thiết lập Base</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đặt Base không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt dưới tán cây, gần nhà cao tầng hoặc gần nguồn phản xạ mạnh có thể làm giảm chất lượng quan sát GNSS.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo sai chiều cao anten</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá phổ biến và có thể ảnh hưởng đến kết quả tính toán tọa độ của trạm Base.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai tọa độ Base</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ, sai kinh tuyến trục, sai cao độ hoặc nhập nhầm tọa độ sẽ khiến Rover đo sai toàn bộ.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai cấu hình Radio</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác tần số, giao thức hoặc công suất giữa Base và Rover sẽ khiến Rover không nhận được dữ liệu hiệu chỉnh.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Di chuyển Base trong khi đang đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu chân máy bị dịch chuyển trong quá trình làm việc, toàn bộ kết quả sau thời điểm dịch chuyển đều có thể không còn đảm bảo độ tin cậy và nên được kiểm tra hoặc đo lại.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguồn điện không đủ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base mất nguồn hoặc khởi động lại giữa ca đo sẽ làm gián đoạn việc truyền dữ liệu hiệu chỉnh đến Rover.<br /> <br /> >>> Thiết lập Base RTK không chỉ là vài thao tác trên bộ điều khiển mà còn bao gồm việc lựa chọn vị trí đặt máy, định tâm chính xác, nhập đúng chiều cao anten, cấu hình tọa độ và kiểm tra trạng thái hoạt động của toàn bộ hệ thống. Thực hiện đúng các bước ngay từ đầu sẽ giúp Rover nhận dữ liệu hiệu chỉnh ổn định, giảm thời gian xử lý sự cố ngoài thực địa và nâng cao độ tin cậy của kết quả đo.<br /> <br /> Mặc dù tên gọi các chức năng hoặc giao diện có thể khác nhau giữa các hãng, nguyên tắc thiết lập trạm Base về cơ bản vẫn tương tự. Nắm vững các nguyên lý này sẽ giúp người sử dụng dễ dàng làm việc với nhiều dòng RTK khác nhau.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 260626.png" style="width: 800px; height: 533px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Liên hệ ngay <a href="https://zalo.me/0913051734"><span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt qua Zalo</strong></span></a> để được tư vấn chọn máy phù hợp nhất!</span></span><br /> <a class="zalo-float" href="https://zalo.me/0949322456" rel="noopener" target="_blank"> <span class="zalo-icon">Z</span> <span class="zalo-text">Nhắn Zalo</span> </a> <style type="text/css"> .zalo-float { position: fixed; right: 20px; bottom: 90px; z-index: 9999; display: flex; align-items: center; gap: 8px; background: #0068ff; color: #fff; padding: 12px 16px; border-radius: 999px; font-weight: 700; font-size: 15px; text-decoration: none; box-shadow: 0 8px 24px rgba(0,0,0,0.22); } .zalo-float:hover { transform: translateY(-2px); opacity: 0.95; } .zalo-icon { width: 28px; height: 28px; border-radius: 50%; background: #fff; color: #0068ff; display: flex; align-items: center; justify-content: center; font-weight: 800; } @media (max-width: 768px) { .zalo-float { right: 14px; bottom: 80px; padding: 11px 14px; font-size: 14px; } }</style> ', 'images' => '202606260951032f4d94b16f8c4b40c845fa69fd0c4dc4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật từ A đến Z', 'meta_key' => '', 'meta_des' => 'Hướng dẫn chi tiết cách thiết lập trạm Base RTK: chọn vị trí, định tâm, đo chiều cao anten, cấu hình Known Point hoặc Base Here, Radio/NTRIP và các lỗi thường gặp.', 'created' => '2026-06-26', 'modified' => '2026-07-12', 'status' => '1', 'view' => '525', 'slug' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '557', 'rght' => '558', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '822', 'name' => 'Hiểu đúng về RTCM 1021–1027, Helmert (Bursa-Wolf), 7 tham số và chuyển đổi hệ tọa độ', 'code' => null, 'alias' => 'hieu-dung-ve-rtcm-1021–1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàncầu sang hệ tọa độ làm việc tại địa phương.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàn cầu sang hệ tọa độ làm việc tại địa phương.<br /> <br /> Vậy RTK thực chất đo trong hệ nào?<br /> <br /> Máy thu GNSS không đo trực tiếp trong hệ tọa độ VN-2000. Thay vào đó, thiết bị xác định vị trí trong một hệ quy chiếu địa tâm toàn cầu (global geocentric reference frame), chẳng hạn như WGS84 hoặc các realization gần với ITRF (International Terrestrial Reference Frame).<br /> <br /> Trong khi đó, tại Việt Nam, phần lớn bản đồ địa hình, bản đồ địa chính, hồ sơ thiết kế và công trình lại sử dụng hệ tọa độ VN-2000 hoặc hệ tọa độ công trình. <br /> <br /> Vì vậy, trước khi có thể sử dụng ngoài thực địa, kết quả đo GNSS cần được chuyển đổi sang hệ tọa độ làm việc.<br /> <br /> Có thể hình dung quy trình tổng quát như sau: <strong>GNSS/RTK → WGS84 hoặc ITRF (realization cụ thể) → Chuyển đổi hệ quy chiếu và phép chiếu bản đồ (khi cần) → VN-2000 hoặc hệ tọa độ công trình.</strong><br /> <br /> <em>Lưu ý: WGS84 và ITRF đều có nhiều phiên bản (realizations) được cập nhật theo thời gian. Trong hầu hết công việc RTK thông thường, quá trình này đã được phần mềm RTK hoặc dịch vụ CORS xử lý. Tuy nhiên, với các ứng dụng yêu cầu độ chính xác cao hoặc xử lý dữ liệu nhiều thời kỳ, vẫn cần quan tâm đến reference frame và epoch của dữ liệu.</em></span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. 7 tham số là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trắc địa, một trong những mô hình phổ biến để chuyển đổi giữa hai hệ quy chiếu là phép biến đổi 7 tham số (Seven-Parameter Transformation).<br /> <br /> Bộ tham số gồm: </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔX: Tịnh tiến theo trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔY: Tịnh tiến theo trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔZ: Tịnh tiến theo trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rx: Góc quay quanh trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ry: Góc quay quanh trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rz: Góc quay quanh trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Scale: Hệ số tỷ lệ (ppm)</span></span></li> </ul> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/coordtrans datum transformation.gif" style="width: 613px; height: 407px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong đó:<br /> - Ba tham số đầu mô tả sự dịch chuyển giữa hai hệ quy chiếu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ba tham số tiếp theo mô tả sự quay.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Tham số cuối cùng mô tả sự khác biệt về tỷ lệ.</span></span></span></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình này giả thiết rằng mối quan hệ giữa hai hệ quy chiếu có thể được biểu diễn bằng một phép biến đổi gồm ba tham số tịnh tiến, ba tham số quay và một tham số tỷ lệ.<br /> <br /> Trong các phần mềm RTK, người dùng có thể gặp nhiều tên gọi như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Seven Parameters</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Helmert Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bursa-Wolf Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Datum Transformation</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư hiện trường, điều quan trọng cần nhớ là: 7 tham số là một mô hình dùng để chuyển đổi giữa hai hệ quy chiếu.<br /> <br /> Trong những khu vực có biến dạng không đồng nhất, mô hình này có thể không đạt độ chính xác cao bằng các phương pháp sử dụng lưới hiệu chỉnh (Grid Shift).<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Bursa-Wolf và Helmert có giống nhau không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là điểm khá nhiều người nhầm lẫn. Trong nhiều phần mềm RTK, hai tên gọi: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Helmert Transformation & </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Bursa-Wolf Transformation </span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">được sử dụng gần như thay thế cho nhau. <br /> <br /> Tuy nhiên, xét dưới góc độ học thuật, Bursa-Wolf là một quy ước biểu diễn của phép biến đổi Helmert 7 tham số. Sự khác biệt chủ yếu nằm ở quy ước dấu và cách biểu diễn các tham số quay. Đối với phần lớn công việc RTK ngoài thực địa, sự khác biệt này thường không ảnh hưởng đến quá trình sử dụng nếu các tham số được khai báo đúng theo quy ước mà phần mềm yêu cầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Ngoài 7 tham số còn có những phương pháp nào?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi phép chuyển đổi tọa độ đều sử dụng mô hình 7 tham số. Một số phương pháp phổ biến khác gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Molodensky–Badekas</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp này cũng sử dụng bảy tham số nhưng thực hiện phép quay quanh một điểm gốc cục bộ (origin point) thay vì tâm Trái Đất. Cách tiếp cận này thường giúp giảm ảnh hưởng của sai số quay trong các hệ tọa độ địa phương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Grid Shift</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác với mô hình 7 tham số, Grid Shift không sử dụng một bộ tham số chung cho toàn bộ khu vực mà áp dụng các giá trị hiệu chỉnh được nội suy từ lưới.<br /> <br /> Ví dụ: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">NTv2, </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Geoid Grid</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với những khu vực có biến dạng không đồng đều, Grid Shift thường cho độ chính xác cao hơn mô hình 7 tham số.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. RTCM 1021–1027 là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM (Radio Technical Commission for Maritime Services) là tiêu chuẩn quốc tế dùng để truyền dữ liệu hiệu chỉnh trong GNSS RTK. <br /> <br /> Khi nhắc đến RTCM, nhiều người chỉ nghĩ đến các bản tin phục vụ quá trình FIX. Tuy nhiên, trong tiêu chuẩn RTCM 3.x còn có nhóm bản tin 1021–1027, được định nghĩa để truyền các thông tin liên quan đến phép biến đổi datum, phép chiếu bản đồ và một số mô hình hiệu chỉnh phục vụ chuyển đổi sang hệ tọa độ địa phương.<br /> <br /> Theo tài liệu của RTCM SC-104 và một số nhà sản xuất phần mềm GNSS, nhóm bản tin này được thiết kế nhằm hỗ trợ việc chuyển đổi từ hệ quy chiếu GNSS sang hệ tọa độ địa phương. <br /> <br /> Tuy nhiên cần lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi mạng CORS đều phát các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi bộ thu GNSS hoặc phần mềm RTK đều hỗ trợ đầy đủ việc giải mã và áp dụng các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc triển khai có thể khác nhau giữa các phiên bản RTCM, nhà sản xuất thiết bị và dịch vụ CORS.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì vậy, không nên mặc định rằng mọi hệ thống CORS đều truyền hoặc sử dụng RTCM 1021–1027.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1655118093874(1).jpg" style="width: 600px; height: 450px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Vì sao có phần mềm RTK không cần nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, người dùng không cần nhập thủ công, nhưng điều đó không có nghĩa quá trình chuyển đổi không tồn tại. <br /> <br /> Việc chuyển đổi có thể đã được thực hiện thông qua:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cơ sở dữ liệu CRS tích hợp trong phần mềm hoặc bộ điều khiển;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ffile hệ tọa độ (CRS/Projection) được import;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình do nhà sản xuất thiết lập;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin từ dịch vụ CORS;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc các cơ chế chuyển đổi riêng của phần mềm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Do đó, việc không phải nhập không đồng nghĩa với không sử dụng phép chuyển đổi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Khi nào vẫn phải nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số tình huống vẫn cần người dùng thiết lập thủ công, chẳng hạn:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng Base cục bộ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Llàm việc với hệ tọa độ công trình;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng hệ tọa độ địa phương chưa có trong phần mềm;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu khảo sát cũ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc làm việc với các dự án có quy định riêng về hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, người dùng có thể phải:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập 7 tham số;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Import file hệ tọa độ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc thực hiện Site Calibration (Localization).</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. RTCM 1021–1027 có thay thế Site Calibration không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Câu trả lời là không. Hai khái niệm này phục vụ những mục đích khác nhau.<br /> <br /> RTCM 1021–1027 là nhóm bản tin dùng để truyền các thông tin liên quan đến phép chuyển đổi hệ quy chiếu và phép chiếu bản đồ. Trong khi đó, Site Calibration (Localization) là quá trình thiết lập mối quan hệ giữa hệ tọa độ GNSS và hệ tọa độ của dự án thông qua các điểm khống chế ngoài thực địa.<br /> <br /> Site Calibration không thay thế phép chuyển đổi giữa các hệ quy chiếu mà chỉ hiệu chỉnh cục bộ để phù hợp với hệ tọa độ công trình. Ngay cả khi sử dụng mạng CORS và chọn đúng hệ tọa độ, nhiều dự án vẫn yêu cầu kiểm tra trên các mốc khống chế trước khi tiến hành đo chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Những lỗi thường gặp ngoài thực địa</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Qua thực tế sử dụng RTK, một số lỗi liên quan đến hệ tọa độ thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai datum hoặc realization.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai đơn vị của Rx, Ry, Rz (độ, giây hoặc radian).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai hệ số Scale (ppm hoặc hệ số tỷ lệ).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dùng nhầm hệ tọa độ công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tin tưởng trạng thái FIX nhưng không kiểm tra trên mốc khống chế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những nguyên nhân có thể khiến tọa độ sai hàng mét, thậm chí hàng chục mét dù máy vẫn báo FIX bình thường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">9. Người sử dụng RTK cần quan tâm đến điều gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với phần lớn công việc khảo sát, địa chính, thi công hoặc hoàn công, người dùng không nhất thiết phải nhớ chi tiết từng bản tin RTCM.<br /> <br /> Điều quan trọng hơn là:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo đúng Job / Project.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng mountpoint khi dùng CORS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập đúng chiều cao anten.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại trên mốc khống chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ nhìn trạng thái FIX mà bỏ qua cấu hình hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu kết quả đo lệch toàn bộ so với bản vẽ hoặc mốc ngoài thực địa, cần kiểm tra lại hệ tọa độ trước khi nghi ngờ máy RTK hoặc tín hiệu vệ tinh.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> RTCM 1021–1027, Helmert, Bursa-Wolf, 7 tham số và Site Calibration đều liên quan đến quá trình đưa kết quả GNSS về hệ tọa độ làm việc, nhưng chúng không phải là các khái niệm tương đương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS xác định vị trí trong hệ quy chiếu toàn cầu, thường là WGS84 hoặc các realization gần với ITRF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">VN-2000 và hệ tọa độ công trình là các hệ tọa độ làm việc được sử dụng trong khảo sát, thiết kế và thi công tại Việt Nam.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7 tham số (Bursa-Wolf/Helmert) là một trong những mô hình phổ biến dùng để chuyển đổi tọa độ giữa các hệ quy chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM 1021–1027 là nhóm bản tin được thiết kế để hỗ trợ truyền thông tin liên quan đến phép biến đổi tọa độ và phép chiếu bản đồ. Tuy nhiên, việc các bản tin này có được sử dụng hay không còn phụ thuộc vào phiên bản RTCM, hệ thống CORS và phần mềm RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Site Calibration (Localization) là quá trình hiệu chỉnh cục bộ theo các điểm khống chế của dự án và không nên xem là sự thay thế cho các phép biến đổi giữa các hệ quy chiếu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư khảo sát và thi công, hiểu đúng vai trò của từng khái niệm sẽ giúp cấu hình RTK chính xác hơn, xử lý tốt các tình huống liên quan đến hệ tọa độ và hạn chế các sai lệch không đáng có ngoài thực địa.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 230626 2.png" style="width: 800px; height: 533px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;"><u><strong>Tài liệu tham khảo</strong></u></span></span><br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">RTCM Special Committee 104 – <em>RTCM Standard for Differential GNSS (Multiple Signal Messages)</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IOGP – <em>Geomatics Guidance Note 7, Coordinate Conversions and Transformations</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">EPSG Geodetic Parameter Dataset & Guidance Note 7-2.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">ISO 19111 – <em>Geographic Information — Referencing by Coordinates</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Carlson Software – <em>RTCM 1021–1027 White Paper</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Leica Geosystems – <em>Captivate Coordinate System Guide</em>.</span></span></li> </ul> ', 'images' => '20260625150050d64d8db365e7a0f663896871ecf242ce.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'RTK chuyển từ WGS84 sang VN-2000 như thế nào? Giải thích RTCM 1021–1027 và 7 tham số', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách RTK chuyển đổi từ WGS84 sang VN-2000, bản chất của RTCM 1021–1027, Bursa-Wolf Transformation, Helmert 7 tham số và vai trò của Site Calibration trong GNSS RTK.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '752', 'slug' => 'hieu-dung-ve-rtcm-1021-1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '555', 'rght' => '556', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '821', 'name' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân phổ biến và cách khắc phục!', 'code' => null, 'alias' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Với khả năng xác định tọa độ ở độ chính xác mức centimet, RTK đã trở thành công cụ gần như không thể thiếu đối với nhiều kỹ sư. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Trong điều kiện làm việc phù hợp và khi đạt trạng thái FIX, công nghệ RTK có thể cung cấp tọa độ với độ chính xác ở mức centimet. Chính vì vậy, RTK đã trở thành một trong những công cụ quan trọng đối với nhiều kỹ sư khảo sát và xây dựng. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy GPS RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.<br /> </em><br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>I. Trạng thái FIX trong RTK là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công nghệ GNSS RTK, trạng thái FIX (Fixed Solution) là khi bộ thu đã giải được số nguyên chu kỳ sóng mang (<em>Integer Ambiguity</em>). Khi đó, hệ thống có thể xác định tọa độ với độ chính xác ở mức centimet trong điều kiện làm việc phù hợp.<br /> <br /> Thông thường, máy RTK sẽ hiển thị một trong các trạng thái sau:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Single: Định vị độc lập bằng tín hiệu vệ tinh, sai số thường ở mức vài mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DGPS/SBAS: Có dữ liệu hiệu chỉnh, độ chính xác được cải thiện so với Single nhưng chưa đạt mức RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Float: Đã nhận dữ liệu cải chính nhưng chưa giải được hoàn toàn số nguyên chu kỳ sóng mang.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX: Định vị RTK với độ chính xác cao, đáp ứng phần lớn yêu cầu của công tác trắc địa.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lưu ý rằng, trạng thái FIX không đồng nghĩa với việc kết quả luôn chính xác tuyệt đối. Độ tin cậy của phép đo còn phụ thuộc vào điều kiện quan sát vệ tinh, môi trường làm việc, cấu hình hệ tọa độ và việc kiểm tra chất lượng số liệu ngoài thực địa.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 3 FIX.png" style="width: 620px; height: 566px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Không đủ vệ tinh hoặc hình học vệ tinh không thuận lợi</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để đạt được nghiệm FIX, máy RTK cần quan sát đồng thời đủ số lượng vệ tinh với sự phân bố hợp lý trên bầu trời. Máy có thể khó FIX hoặc FIX chậm khi làm việc trong các môi trường như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần nhà cao tầng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hẻm sâu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khu vực có nhiều cây lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dưới mái che hoặc trong nhà xưởng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa hình núi đá che khuất bầu trời.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài số lượng vệ tinh, chỉ số PDOP (Position Dilution of Precision) cũng ảnh hưởng đáng kể đến khả năng FIX. Dù quan sát được nhiều vệ tinh, nếu hình học vệ tinh không thuận lợi thì thời gian FIX vẫn có thể kéo dài hoặc nghiệm FIX kém ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 2 FIX.png" style="width: 600px; height: 400px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hiện tượng đa đường tín hiệu (Multipath)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đa đường tín hiệu là một trong những nguyên nhân phổ biến khiến máy RTK khó giữ FIX. Hiện tượng này xảy ra khi tín hiệu GNSS bị phản xạ qua các bề mặt như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tường kính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhà thép tiền chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xe ô tô hoặc container.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặt nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hàng rào thép.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi bộ thu nhận đồng thời tín hiệu trực tiếp và tín hiệu phản xạ, việc xác định pha sóng mang trở nên khó khăn hơn, khiến nghiệm RTK thiếu ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 5 FIX.png" style="width: 620px; height: 348px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Khoảng cách giữa Base và Rover quá lớn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong hệ thống RTK Base – Rover truyền thống, khoảng cách giữa hai máy ảnh hưởng trực tiếp đến chất lượng dữ liệu cải chính. Trong điều kiện các yếu tố khác tương đương, khoảng cách giữa Base và Rover càng lớn thì việc giải nghiệm RTK thường càng khó khăn hơn.<br /> <br /> Khi khoảng cách tăng lên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số tầng điện ly và tầng đối lưu giữa hai điểm tăng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mức độ tương quan của tín hiệu giảm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian FIX có thể lâu hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giữ FIX giảm trong điều kiện khó.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK Network sử dụng CORS (VRS, iMAX hoặc Single Base), người dùng thường không làm việc với một trạm Base duy nhất. Khả năng FIX còn phụ thuộc vào mật độ mạng CORS, thuật toán xử lý của hệ thống và điều kiện quan sát vệ tinh.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 4 FIX.png" style="width: 620px; height: 410px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Kết nối Internet hoặc dữ liệu cải chính không ổn định</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi sử dụng RTK Network thông qua NTRIP, dữ liệu RTCM phải được truyền liên tục từ máy chủ CORS đến Rover. Một số nguyên nhân thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sóng 4G/5G yếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Wi-Fi không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Server CORS bị gián đoạn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Age of Differential tăng cao.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, dữ liệu cải chính có thể bị trễ hoặc gián đoạn. Tùy từng hãng và từng dòng máy, một số thiết bị có thể duy trì nghiệm FIX trong thời gian ngắn nhờ các tính năng như RTK Hold, RTK Keep hoặc các cơ chế tương tự. Tuy nhiên, nếu việc gián đoạn kéo dài, máy thường sẽ chuyển sang FLOAT hoặc SINGLE.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Nhiễu điện từ và nhiễu vô tuyến</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS từ vệ tinh có công suất rất nhỏ khi đến mặt đất nên dễ bị ảnh hưởng bởi các nguồn nhiễu mạnh. Một số nguồn nhiễu thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạm BTS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radar.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường dây điện cao thế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy phát sóng công suất lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống radio công nghiệp.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK sử dụng Radio UHF, nhiễu vô tuyến còn có thể làm giảm chất lượng liên lạc giữa Base và Rover.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 6 FIX.png" style="width: 620px; height: 411px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Anten GNSS bị che khuất hoặc lắp đặt chưa phù hợp</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng thu tín hiệu của máy RTK phụ thuộc rất nhiều vào vị trí đặt anten. Một số tình huống có thể làm giảm chất lượng tín hiệu gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đứng quá sát tường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt gần xe ô tô.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần mái tôn hoặc kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten bị che bởi người đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cáp hoặc anten bị hư hỏng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lựa chọn vị trí đặt máy thông thoáng luôn là một trong những giải pháp đơn giản nhưng mang lại hiệu quả cao.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Điều kiện khí quyển và hoạt động không gian</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS chịu ảnh hưởng của tầng điện ly và tầng đối lưu. Trong các thời điểm như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bão từ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Kp cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động điện ly mạnh.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">khả năng FIX có thể giảm so với điều kiện bình thường. Trong đa số trường hợp, mưa nhỏ không phải là nguyên nhân chính gây mất FIX.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 1 FIX.png" style="width: 620px; height: 413px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Firmware hoặc cấu hình máy chưa phù hợp<br /> </span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các bản cập nhật firmware mới có thể:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cải thiện thuật toán RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thêm tín hiệu GNSS mới.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khắc phục các lỗi đã được nhà sản xuất ghi nhận.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng khả năng tương thích với các chuẩn RTCM.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, một số cấu hình chưa phù hợp cũng có thể ảnh hưởng đến khả năng FIX, chẳng hạn như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ bật một số hệ vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập góc cắt vệ tinh chưa hợp lý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai thông số truyền Radio giữa Base và Rover.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Người dùng nên cập nhật firmware theo khuyến nghị của nhà sản xuất và kiểm tra lại cấu hình trước khi làm việc ngoài hiện trường.</span></span><br /> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">9. Hiệu năng của từng dòng máy RTK</span></h3> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Không phải mọi bộ thu GNSS RTK đều có khả năng làm việc giống nhau. Hiệu năng của thiết bị phụ thuộc vào nhiều yếu tố như:</span></span><br /> <br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thiết kế anten GNSS.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Chip xử lý tín hiệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thuật toán RTK.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Khả năng chống đa đường.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Tốc độ xử lý dữ liệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Mức độ tối ưu của phần mềm điều khiển.</span></span></li> </ul> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Vì vậy, ngay cả khi làm việc trong cùng điều kiện hiện trường, tốc độ FIX và khả năng giữ FIX giữa các dòng máy cũng có thể khác nhau.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10. Máy vẫn FIX nhưng tọa độ bị sai</span></span></h3> <h3> </h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi thường bị nhầm với hiện tượng "không FIX". Trong nhiều trường hợp, máy vẫn báo FIX bình thường nhưng tọa độ sai đáng kể do:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai tham số chuyển đổi.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp tình huống này, cần kiểm tra lại cấu hình hệ quy chiếu trước khi nghi ngờ chất lượng tín hiệu GNSS.</span></span><br /> <p style="text-align: center;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/Esurvey.jpg" style="width: 620px; height: 324px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Làm thế nào để cải thiện khả năng FIX?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để nâng cao khả năng FIX khi đo RTK, người dùng nên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đo thông thoáng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế làm việc gần các bề mặt phản xạ mạnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra số lượng vệ tinh và chỉ số PDOP.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo kết nối Internet hoặc Radio ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi chỉ số Age of Differential.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra đúng cấu hình hệ tọa độ trước khi đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cập nhật firmware theo khuyến nghị của nhà sản xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra định kỳ anten và phụ kiện.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm trên các điểm khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ dựa vào trạng thái FIX, nên kiểm tra trên mốc khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác. <br /> <br /> >>> Máy GPS RTK không phải lúc nào cũng đạt trạng thái FIX ngay sau khi khởi động. Khả năng FIX phụ thuộc vào nhiều yếu tố như điều kiện quan sát vệ tinh, hiện tượng đa đường, chất lượng dữ liệu cải chính, kết nối Internet hoặc Radio, điều kiện khí quyển, cấu hình thiết bị và môi trường làm việc.<br /> <br /> Trong thực tế, trạng thái FIX là điều kiện cần nhưng chưa phải điều kiện đủ để khẳng định chất lượng kết quả đo. Bên cạnh việc theo dõi trạng thái FIX, người sử dụng vẫn nên kết hợp kiểm tra trên mốc khống chế, đo lặp các điểm quan trọng và đánh giá điều kiện hiện trường nhằm đảm bảo độ tin cậy của số liệu.<br /> <br /> Hiểu rõ các nguyên nhân trên sẽ giúp kỹ sư trắc địa xử lý nhanh các tình huống ngoài thực địa, lựa chọn phương án đo phù hợp và khai thác hiệu quả hơn công nghệ GNSS RTK.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/TRẮC ĐỊA THÀNH ĐẠT (Logo) (Ảnh bìa Facebook).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 300px;" /></p> <br /> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ ngay </span><a href="https://zalo.me/0949322456" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><span style="margin: 0px; padding: 0px; color: rgb(255, 102, 0);"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt qua Zalo</strong></span></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để được tư vấn chọn máy phù hợp nhất!</span>', 'images' => '20260625110358e00121db9ef2b0248aadce5ad04f0e9d.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân và cách khắc phục', 'meta_key' => '', 'meta_des' => 'Máy GPS RTK không FIX được hoặc thường xuyên chuyển giữa FIX và FLOAT? Tìm hiểu 10 nguyên nhân phổ biến như vệ tinh, CORS, Internet, Base, nhiễu tín hiệu và cách khắc phục hiệu quả.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '537', 'slug' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '553', 'rght' => '554', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '820', 'name' => 'AI trong ngành trắc địa: Công việc nào sẽ được tự động hóa trước?', 'code' => null, 'alias' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span><o:p></o:p></p> <p data-end="686" data-start="526"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang dần xuất hiện trong nhiều công đoạn của quy trình khảo sát và thành lập bản đồ.</span></span><o:p></o:p></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span></em><br /> <br /> <o:p></o:p></p> <p data-end="686" data-start="526"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, phân loại dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang giúp giảm đáng kể thời gian xử lý dữ liệu và hỗ trợ kỹ sư đưa ra quyết định nhanh hơn. Tuy nhiên, một câu hỏi được nhiều người quan tâm là: </span></span></em><em style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Công việc nào trong ngành trắc địa sẽ được AI tự động hóa trước?</strong></em></p> <p style="text-align: center;"> </p> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and BIM 2.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 450px; height: 299px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong quá trình khảo sát và thành lập bản đồ, khối lượng dữ liệu thu thập được ngày càng lớn. Một chuyến bay UAV có thể tạo ra hàng nghìn ảnh chụp.<br /> <br /> Một dự án LiDAR có thể tạo ra hàng triệu đến hàng tỷ điểm Point Cloud. <br /> <br /> Các hệ thống quan trắc hiện đại có thể ghi nhận dữ liệu liên tục 24/7.<br /> <br /> Khối lượng dữ liệu này vượt xa khả năng xử lý thủ công của con người. Đây chính là môi trường lý tưởng để AI phát huy hiệu quả. Theo nhiều nghiên cứu gần đây, AI đặc biệt phù hợp với các nhiệm vụ nhận dạng mẫu, phân loại dữ liệu, phát hiện bất thường và tự động hóa các quy trình xử lý lặp lại.</span></span><br /> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">A. AI đang được ứng dụng như thế nào trong trắc địa?</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Xử lý dữ liệu UAV và ảnh viễn thám</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lĩnh vực phát triển nhanh nhất hiện nay. AI có thể hỗ trợ:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng nhà cửa, đường giao thông và cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động phân loại lớp phủ bề mặt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện thay đổi địa hình qua nhiều thời điểm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thành lập bản đồ hiện trạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều nghiên cứu đã chứng minh AI có khả năng tự động nhận dạng và trích xuất đối tượng từ ảnh UAV với độ chính xác cao, giúp giảm đáng kể khối lượng công việc số hóa thủ công.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and UAV.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Xử lý Point Cloud và LiDAR</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong các dự án quét laser mặt đất hoặc UAV LiDAR, việc phân loại Point Cloud thường tiêu tốn rất nhiều thời gian.<br /> AI hiện có thể:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tách điểm mặt đất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng công trình xây dựng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo mô hình 3D bán tự động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số hệ thống hiện nay còn có khả năng xử lý dữ liệu LiDAR gần như theo thời gian thực và tự động phân loại địa vật với mức can thiệp thủ công rất thấp.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and Lidar.jpg" style="width: 500px; height: 333px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Thành lập và cập nhật bản đồ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong lĩnh vực GIS và bản đồ, AI đang được ứng dụng để:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động số hóa đối tượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất ranh giới địa vật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lỗi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện các bất thường về hình học và thuộc tính.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các nghiên cứu về bản đồ địa chính và bản đồ nền cho thấy AI có tiềm năng rút ngắn đáng kể thời gian thành lập và cập nhật dữ liệu bản đồ.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and Mapping(1).jpg" style="width: 600px; height: 300px;" /></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Quan trắc công trình và giám sát biến dạng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các công trình cầu, đập, nhà cao tầng hoặc mỏ khai thác, dữ liệu quan trắc thường được thu thập liên tục trong thời gian dài AI có thể giúp:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện số liệu bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi xu hướng chuyển vị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự báo nguy cơ lún hoặc nghiêng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ cảnh báo sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây được xem là một trong những hướng ứng dụng có tiềm năng lớn vì AI rất giỏi trong việc phát hiện các quy luật ẩn trong tập dữ liệu dài hạn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and monitoring.jpg" style="width: 600px; height: 335px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Công việc văn phòng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu phải lựa chọn một nhóm công việc có khả năng được AI tự động hóa trước trong ngành trắc địa, thì đó có lẽ là các công việc văn phòng mang tính lặp lại và xử lý dữ liệu. Các công việc như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu giữa các định dạng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tổng hợp số liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra các lỗi dữ liệu đơn giản.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu, bảng biểu và báo cáo kỹ thuật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất thông tin từ nhật ký hoặc sổ đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại và sắp xếp dữ liệu dự án.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những công việc có quy trình tương đối rõ ràng và ít phụ thuộc vào đánh giá chuyên môn của kỹ sư. Trên thực tế, nhiều phần mềm hiện nay đã bắt đầu tích hợp các tính năng tự động hóa dạng này. AI chỉ đang giúp các quy trình đó trở nên thông minh và hiệu quả hơn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ai and office.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">B. Công việc nào khó bị AI thay thế?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực tế hiện nay, đây có lẽ là nhóm ứng dụng AI gần gũi nhất với nhiều kỹ sư trắc địa. Thay vì mất hàng giờ để viết các công cụ Excel, Python hoặc VBA, nhiều kỹ sư đã bắt đầu sử dụng AI để hỗ trợ:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Viết chương trình chuyển đổi tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán stakeout tim tuyến, cọc khoan nhồi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra dữ liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển ảnh sổ đo thành bảng tính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu nghiệm thu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Soạn thảo báo cáo kỹ thuật.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AI không thực hiện thay công việc chuyên môn, nhưng có thể giúp rút ngắn đáng kể thời gian xử lý các công việc lặp lại.<br /> <br /> >>> Nếu GNSS giúp người làm trắc địa đo nhanh hơn, UAV giúp thu thập dữ liệu nhanh hơn thì AI có thể giúp xử lý dữ liệu nhanh hơn.</span></span> <p data-end="2115" data-start="1963"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong tương lai gần, lợi thế có thể không nằm ở việc ai sử dụng AI hay không, mà nằm ở việc ai biết khai thác AI hiệu quả hơn trong công việc hàng ngày. </span></span><br /> <br /> <strong><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="text-align: justify; margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span></strong></p> ', 'images' => '20260617172058d2979529aed88d220bef4d1f33c5f441.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'AI trong trắc địa: Công việc nào sẽ được tự động hóa trước?', 'meta_key' => '', 'meta_des' => 'AI đang được ứng dụng ngày càng nhiều trong ngành trắc địa, từ xử lý UAV, LiDAR, bản đồ đến lập báo cáo kỹ thuật. Vậy công việc nào sẽ được AI tự động hóa trước? Tìm hiểu trong bài viết này.', 'created' => '2026-06-17', 'modified' => '2026-07-11', 'status' => '1', 'view' => '670', 'slug' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '551', 'rght' => '552', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '819', 'name' => 'BIM và LiDAR đang dùng những định dạng dữ liệu nào? Giải thích IFC, RVT, NWD, LAS, LAZ từ A-Z', 'code' => null, 'alias' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.</span></span><br /> ', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.<br /> <br /> Vậy các định dạng này dùng để làm gì và khác nhau như thế nào?</em></span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Nhóm dữ liệu BIM</span></span></h2> <br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 IFC (Industry Foundation Classes)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC là định dạng trao đổi dữ liệu BIM mở được phát triển bởi buildingSMART. Mục đích chính của IFC là cho phép các phần mềm BIM khác nhau trao đổi mô hình với nhau mà không phụ thuộc vào một hãng phần mềm cụ thể.</span></span><br /> <br /> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>- Ưu điểm:</strong> Không phụ thuộc vào một nhà cung cấp phần mềm cụ thể, hỗ trợ phối hợp giữa nhiều bộ môn và phù hợp cho việc bàn giao, lưu trữ dữ liệu dự án trong thời gian dài.</span></span><br /> <br /> <o:p></o:p></p> <p data-end="608" data-start="295"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="307" data-start="295">- Hạn chế:</strong> Không phải phần mềm BIM nào cũng hỗ trợ đầy đủ mọi tính năng của IFC. Trong một số trường hợp, các tham số đối tượng, Family phức tạp hoặc dữ liệu chuyên biệt có thể bị mất hoặc thay đổi khi chuyển đổi. Ngoài ra, khả năng tương thích còn phụ thuộc vào phiên bản IFC sử dụng (IFC2x3, IFC4, IFC4.3...).</span></span><br /> <br /> <o:p></o:p></p> <p data-end="858" data-start="613"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="634" data-start="613">- Ứng dụng thực tế:</strong> IFC thường được sử dụng để trao đổi dữ liệu giữa các bộ môn, bàn giao mô hình BIM cho chủ đầu tư và lưu trữ dữ liệu dự án theo định dạng mở (vendor-neutral), giúp giảm sự phụ thuộc vào một phần mềm hoặc nhà cung cấp cụ thể.</span></span><o:p></o:p></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Autodesk Revit, Tekla Structures, Archicad, Bentley OpenBuildings đều có thể xuất hoặc nhập file IFC nên IFC thường được xem là "ngôn ngữ chung" của BIM.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 BCF (BIM Collaboration Format)</span></span></h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">BCF được sử dụng để trao đổi các vấn đề (Issue), bình luận (Comment), góc nhìn (Viewpoint) và vị trí cần xử lý trong mô hình BIM. BCF không chứa mô hình 3D mà chỉ lưu thông tin phục vụ quá trình phối hợp giữa các bên.</span> <p> <br /> <strong data-end="337" data-start="325" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Dung lượng nhỏ, dễ chia sẻ và tích hợp với nhiều nền tảng BIM như Autodesk Construction Cloud (BIM 360), Solibri, Tekla BIMsight và các hệ thống quản lý Issue khác. BCF đặc biệt hữu ích trong các cuộc họp phối hợp (Coordination Meeting), kiểm tra va chạm (Clash Detection) và quy trình QA/QC.</span></p> <p data-end="630" data-start="325"> <br /> <strong data-end="653" data-start="635" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Lưu ý thực tế:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> BCF thường được sử dụng kèm với các file mô hình như IFC, RVT hoặc NWD để người dùng có thể xem đầy đủ bối cảnh của vấn đề. Một ưu điểm quan trọng của BCF là khả năng theo dõi lịch sử xử lý (Traceability), giúp liên kết giữa vấn đề được phát hiện, người phụ trách và các thay đổi được thực hiện trong dự án.</span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 RVT</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RVT là định dạng dự án của Autodesk Revit. Một file RVT có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiến trúc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống MEP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số vật liệu</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng BIM được sử dụng rất phổ biến hiện nay.</span></span><br /> <br /> <p data-end="355" data-start="108"> <strong data-end="372" data-start="360" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Lưu giữ đầy đủ tham số đối tượng, lịch sử làm việc, Worksharing và các thông tin thiết kế chi tiết. RVT là định dạng mang lại khả năng làm việc đầy đủ nhất trong môi trường Revit.</span></p> <p data-end="552" data-start="360"> </p> <p data-end="808" data-start="557"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="569" data-start="557">Hạn chế:</strong> RVT là định dạng độc quyền (proprietary) của Autodesk. Các phần mềm BIM khác thường không thể đọc hoặc khai thác đầy đủ toàn bộ thông tin trong file RVT. Vì vậy, khi cần phối hợp đa nền tảng, người dùng thường phải xuất sang IFC hoặc NWD.</span></span><br /> </p> <p data-end="1161" data-start="813"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="831" data-start="813">Lưu ý thực tế:</strong> RVT thường được sử dụng trong nội bộ đơn vị thiết kế hoặc giữa các bên cùng sử dụng Revit. Khi cần trao đổi dữ liệu với chủ đầu tư, nhà thầu hoặc các đơn vị sử dụng phần mềm khác, IFC thường là lựa chọn phổ biến để bàn giao mô hình BIM, trong khi NWD thường được sử dụng cho công tác phối hợp và kiểm tra mô hình trên Navisworks.</span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 RFA</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA là định dạng Family của Revit. Family có thể hiểu là thư viện các đối tượng BIM như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa sổ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị điện</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị cơ điện</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA tương tự như Block trong AutoCAD nhưng có nhiều thông tin tham số hơn.<br /> <br /> <strong>Ưu điểm</strong>: RFA cho phép mô tả đối tượng bằng các tham số chi tiết như kích thước, vật liệu, mã thiết bị và thông tin kỹ thuật. Nhờ đó, các đối tượng có thể dễ dàng tái sử dụng giữa nhiều dự án khác nhau, đồng thời giúp chuẩn hóa dữ liệu BIM trong doanh nghiệp.<br /> <br /> <strong>Hạn chế</strong>: RFA là định dạng riêng của Revit nên chủ yếu hoạt động trong hệ sinh thái Autodesk. Khi xuất sang IFC, các Family phức tạp có thể bị đơn giản hóa hoặc mất một phần tham số do sự khác biệt giữa các chuẩn dữ liệu BIM.<br /> <br /> <strong>Lưu ý</strong>: Nên tiêu chuẩn hóa thư viện Family trước khi triển khai dự án hoặc bàn giao dữ liệu. Đối với các Family quan trọng, cần quản lý phiên bản (Version Control) và tài liệu hóa các tham số chính để đảm bảo tính nhất quán giữa các bộ môn và các giai đoạn của dự án.</span></span><br /> <br /> <h3> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.5 RTE</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTE là định dạng Template của Revit. Đây là file mẫu được sử dụng khi khởi tạo dự án mới nhằm đảm bảo tiêu chuẩn hóa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Family</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy ước đặt tên</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số dự án</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/BIM 2(1).jpg" style="width: 662px; height: 463px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Nhóm dữ liệu Navisworks</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 NWD</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD là định dạng mô hình tổng hợp của Autodesk Navisworks. File NWD có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều mô hình BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Clash Detection</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Markup</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu phối hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng thường được sử dụng trong các cuộc họp BIM hoặc bàn giao mô hình.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 NWC</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWC là định dạng trung gian của Navisworks. File NWC thường nhẹ hơn NWD và được sử dụng để tăng tốc quá trình nạp mô hình.<br /> Nhiều dự án BIM sử dụng NWC làm định dạng trao đổi nội bộ giữa các bộ môn.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.3 NWV</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWV là định dạng Viewpoint của Navisworks. Nó lưu các thông tin về:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái hiển thị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thiết lập quan sát mô hình</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với NWD hoặc NWC, NWV ít được sử dụng hơn.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Navisworks.jpg" style="width: 680px; height: 392px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Nhóm dữ liệu Point Cloud</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 LAS (LASer File Format)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS là định dạng tiêu chuẩn lưu trữ dữ liệu Point Cloud từ công nghệ LiDAR. Mỗi điểm trong file LAS có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Intensity</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GPS Time</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Classification</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Màu RGB</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS thường được tạo ra từ: UAV LiDAR; Mobile Mapping; SLAM Scanner; Máy quét laser mặt đất (TLS); LiDAR hàng không. Một file LAS có thể chứa từ hàng triệu đến hàng trăm triệu điểm.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 LAZ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAZ là phiên bản nén của LAS. Tương tự như DXF, DWG; ZIP và thư mục dữ liệu. <br /> <br /> LAZ giúp giảm đáng kể dung lượng lưu trữ nhưng vẫn giữ nguyên thông tin Point Cloud. Hiện nay phần lớn các dự án LiDAR đều sử dụng LAZ để tối ưu dung lượng và tốc độ truyền dữ liệu.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lidar format.jpg" style="width: 565px; height: 353px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. So sánh nhanh các nhóm dữ liệu</span></span></h2> <br /> <table border="1" cellpadding="0" cellspacing="3" style="width: 100%"> <tbody> <tr> <td style="width: 128px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nhóm dữ liệu</strong></span></span></td> <td style="width: 160px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Định dạng phổ biến</strong></span></span></td> <td style="width: 212px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Mục đích</strong></span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ điểm</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý điểm đo, stakeout</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CAD</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF, DWG</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Bản vẽ kỹ thuật 2D/3D</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">BIM</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC, RVT, RFA, RTE, BCF</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình công trình số</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Navisworks</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD, NWC, NWV</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Phối hợp và kiểm tra mô hình</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Cloud</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS, LAZ</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu quét laser và LiDAR</span></span></td> </tr> </tbody> </table> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Sự phát triển của BIM, UAV LiDAR và công nghệ quét laser 3D đang làm thay đổi cách dữ liệu được tạo ra và sử dụng trong ngành xây dựng.<br /> <br /> Nếu CSV và DXF vẫn là những định dạng quen thuộc đối với kỹ sư đo đạc thì IFC, RVT, NWD hay LAS đang trở thành những định dạng ngày càng phổ biến trong các dự án hiện đại.<br /> <br /> Việc hiểu được chức năng của từng loại dữ liệu sẽ giúp kỹ sư lựa chọn đúng định dạng, trao đổi thông tin hiệu quả hơn và tránh nhiều sai sót trong quá trình triển khai dự án.</span></span><br /> <br /> <h2 data-end="2546" data-start="2275" id="lien-he-trac-dia-thanh-dat-de-duoc-tu-van-giai-phap-phu-hop-voi-tung-loai-cong-trinh" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span><br /> <br /> <span style="display: none;"> </span><span style="display: none;"> </span><img alt="" src="/admin/webroot/upload/image/images/bim 5.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; color: rgb(34, 34, 34); width: 678px; height: 452px;" /><span style="display: none;"> </span><span style="display: none;"> </span></h2> <p> </p> ', 'images' => '2026061315274748a34b386d28d2887f07eb97a60c9540.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Ngoài CSV và DXF: Tìm hiểu các định dạng IFC, RVT, NWD, LAS trong BIM và quét laser 3D', 'meta_key' => '', 'meta_des' => 'iFC, RVT, NWD, LAS, LAZ là gì? Tìm hiểu các định dạng dữ liệu BIM, Navisworks và Point Cloud phổ biến trong xây dựng, đo đạc, UAV LiDAR và quét laser 3D.', 'created' => '2026-06-13', 'modified' => '2026-07-12', 'status' => '1', 'view' => '810', 'slug' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '549', 'rght' => '550', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '818', 'name' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'code' => null, 'alias' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></p> <p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></em></p> <p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></em></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Từ cuộc đua vệ tinh đến cuộc đua trải nghiệm ngoài thực địa</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng 10 năm trước, khi một hãng giới thiệu thế hệ máy GNSS RTK mới, những thông số thường được nhắc đến nhiều nhất là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi được bao nhiêu kênh vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ những hệ thống GNSS nào.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX nhanh hơn bao nhiêu giây.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao hơn bao nhiêu milimet.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời điểm đó, đây thực sự là những yếu tố tạo nên sự khác biệt giữa các sản phẩm trên thị trường. Các hãng liên tục nâng số lượng kênh từ vài trăm lên hàng nghìn kênh. Những hệ thống mới như Galileo, BeiDou hay QZSS lần lượt được bổ sung. Công nghệ xử lý tín hiệu cũng ngày càng hoàn thiện.<br /> <br /> Tuy nhiên, khi nhìn vào thị trường hiện nay, có thể thấy cuộc đua đó đang dần thay đổi. Hầu hết các dòng RTK hiện đại đều đã hỗ trợ đa hệ vệ tinh, đa tần số và có khả năng đạt độ chính xác centimet trong điều kiện làm việc bình thường. Khi khoảng cách công nghệ về phần cứng GNSS ngày càng thu hẹp, các hãng bắt đầu tìm kiếm một hướng đi mới - Đó là nâng cao trải nghiệm làm việc ngoài thực địa.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Điều mà kỹ sư đo đạc thực sự quan tâm là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với người sử dụng máy RTK ngoài công trường, câu hỏi quan trọng nhất thường không phải: "Máy này theo dõi được bao nhiêu vệ tinh?" mà là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi hoàn thành công việc nhanh hơn không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi đo được những vị trí khó không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm được thời gian đi lại ngoài hiện trường không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm số lượng thiết bị phải mang theo không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp công việc an toàn hơn không?</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây chính là lý do nhiều công nghệ mới xuất hiện trong vài năm gần đây.<br /> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. IMU – Bước thay đổi đầu tiên</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một trong những cải tiến có ảnh hưởng lớn nhất là công nghệ IMU. Trước đây, việc giữ sào GNSS thẳng đứng gần như là yêu cầu bắt buộc.<br /> Những vị trí như: chân tường, góc công trình, mép hàng rào hay khu vực cây cối thường gây khó khăn cho người đo. Nhưng IMU đã thay đổi hoàn toàn cách làm việc này. Người sử dụng có thể nghiêng sào trong một phạm vi nhất định mà vẫn duy trì được độ chính xác cao.<br /> <br /> Ngày nay, bù nghiêng gần như đã trở thành tính năng tiêu chuẩn trên các dòng RTK mới.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (1).png" style="width: 680px; height: 383px;" /></span></span></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Camera – Khi RTK bắt đầu "nhìn thấy" hiện trường</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau IMU, các hãng tiếp tục đưa camera lên Rover GNSS. Ban đầu, nhiều người cho rằng đây chỉ là một tính năng mang tính trình diễn công nghệ.<br /> Tuy nhiên, thực tế camera đã mở ra nhiều ứng dụng mới:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhận hiện trạng công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo điểm từ ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout bằng thực tế tăng cường (AR).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại dữ liệu sau khi khảo sát.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này giúp RTK không chỉ cung cấp tọa độ mà còn lưu giữ được bối cảnh thực tế của hiện trường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (2).png" style="width: 680px; height: 678px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Laser Survey – Xu hướng đáng chú ý nhất hiện nay</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu IMU giúp người dùng đo nghiêng và camera giúp ghi nhận hình ảnh, thì Laser Survey đang hướng tới một mục tiêu khác. Đó là đo được những vị trí mà trước đây Rover GNSS khó hoặc không thể tiếp cận.<br /> Hãy hình dung một số tình huống quen thuộc mà anh em có thể gặp khi trực tiếp đo ngoài công trình: <br /> - Mép taluy cao.<br /> - Hồ điều hòa.<br /> - Bờ kênh.<br /> - Hố đào sâu.<br /> - Mái nhà.<br /> - Tường chắn.<br /> - Khu vực đang thi công nguy hiểm.<br /> <br /> Với RTK truyền thống, muốn lấy tọa độ chính xác, người đo thường phải đưa sào đến tận vị trí cần đo. Điều này không phải lúc nào cũng thuận lợi hoặc an toàn. Laser Survey ra đời để giải quyết vấn đề đó. Thay vì đưa anten GNSS đến điểm đo, người sử dụng chỉ cần hướng tia laser đến mục tiêu. Phần mềm sẽ kết hợp dữ liệu từ GNSS, IMU và laser để tính toán tọa độ của điểm cần khảo sát.</span></span><br /> <p data-end="1209" data-start="1006"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tất nhiên, việc đo các vị trí khó tiếp cận bằng tia laser không phải là điều hoàn toàn mới trong ngành đo đạc. Máy toàn đạc điện tử đã sử dụng công nghệ đo không gương (Reflectorless) từ nhiều năm trước. Điểm khác biệt là Laser Survey đang đưa khả năng này lên nền tảng Rover GNSS, cho phép người dùng vừa khai thác ưu thế định vị vệ tinh ngoài hiện trường, vừa thực hiện các phép đo từ xa trong những tình huống mà trước đây thường phải kết hợp thêm máy toàn đạc hoặc các thiết bị khác.</span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lý do nhiều chuyên gia nhận định rằng Laser Survey có thể là một trong những bước phát triển đáng chú ý nhất của Rover GNSS trong những năm gần đây.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/i85-gnss-imu-dual-cameras-laser-land-surveying.jpg" style="width: 472px; height: 354px;" /></span></span></p> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>6. Vì sao các hãng TQ đầu tư mạnh vào hướng đi này?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một lý do quan trọng là thị trường đã thay đổi. Trước đây, người mua thường so sánh:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu kênh vệ tinh?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu tần số?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác bao nhiêu milimet?</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngày nay, người dùng bắt đầu quan tâm nhiều hơn đến các yếu tố như:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Năng suất làm việc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trải nghiệm sử dụng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính linh hoạt ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giải quyết các tình huống thực tế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này khiến các hãng phải chuyển hướng nghiên cứu: không chỉ phát triển bộ thu GNSS tốt hơn, mà còn phải tìm cách giúp người dùng làm việc hiệu quả hơn.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>7. RTK đang dần trở thành nền tảng tích hợp cảm biến</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu quan sát sự phát triển của các thế hệ RTK gần đây, có thể thấy một xu hướng rất rõ. RTK không còn đơn thuần là thiết bị thu tín hiệu vệ tinh mà nó đang trở thành một nền tảng tích hợp nhiều cảm biến:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IMU.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Laser.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công nghệ xử lý hình ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thuật toán tự động hóa và trí tuệ nhân tạo (AI).</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi công nghệ đều nhằm giải quyết một khó khăn cụ thể ngoài công trường.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image(1).png" style="width: 680px; height: 680px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Có thể nói, khi khả năng thu tín hiệu GNSS giữa các thế hệ thiết bị ngày càng tiệm cận nhau, cuộc cạnh tranh của các hãng đang dần chuyển sang một hướng mới: giúp kỹ sư hoàn thành công việc nhanh hơn, an toàn hơn và thuận tiện hơn ngoài thực địa.</span></span> <p data-end="2546" data-start="2275"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera, IMU và Laser Survey có thể chỉ là những bước khởi đầu cho xu hướng đó. Trong tương lai, GNSS RTK nhiều khả năng sẽ không chỉ là thiết bị định vị vệ tinh, mà sẽ trở thành một nền tảng tích hợp nhiều cảm biến phục vụ công tác khảo sát và thi công ngoài hiện trường. </span></span><br /> </p> <h2 data-end="2546" data-start="2275"> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt </strong></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">để được tư vấn và hỗ trợ tốt nhất!</span></h2> ', 'images' => '2026061214390046f6215956d7c46255d00263c715c9d4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng Trung Quốc chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'meta_key' => '', 'meta_des' => 'Khám phá xu hướng phát triển mới của các hãng GNSS RTK như CHCNAV, eSurvey và nhiều thương hiệu khác. Từ IMU, Camera đến Laser Survey, cuộc đua công nghệ đang chuyển từ phần cứng GNSS sang nâng cao trải nghiệm làm việc ngoài thực địa.', 'created' => '2026-06-12', 'modified' => '2026-07-11', 'status' => '1', 'view' => '778', 'slug' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '547', 'rght' => '548', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '817', 'name' => 'Định dạng file RTK: Hướng dẫn xuất, nhập và xử lý lỗi thường gặp trong đo đạc', 'code' => null, 'alias' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.</span></span>', 'content' => '<p> <em><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong thực tế, công việc đo đạc không kết thúc khi Rover báo FIX hoặc khi hoàn thành việc thu thập tọa độ ngoài hiện trường. Sau bước đo đạc, dữ liệu thường phải trải qua nhiều công đoạn như:</span></em><br /> </p> <ul> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển về văn phòng.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biên tập trên AutoCAD hoặc CASS.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý trên Civil 3D, Trimble Business Center (TBC), Leica Infinity.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra trên Google Earth.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển giao cho chủ đầu tư hoặc đơn vị thiết kế.</span></span></em></li> </ul> <br /> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ cần xuất sai định dạng hoặc thiếu dữ liệu, toàn bộ quy trình phía sau có thể bị gián đoạn. Theo tài liệu của Trimble Business Center, hệ sinh thái khảo sát hiện nay hỗ trợ rất nhiều định dạng khác nhau như CSV, TXT, DXF, DWG, KML, SHP, XML, JOB, RINEX... phục vụ các mục đích sử dụng khác nhau.<br /> </span></span></em> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/61sq3Qk7zvL.jpg" style="width: 600px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Các định dạng file dữ liệu phổ biến ở máy RTK</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 CSV (*.csv)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV (Comma Separated Values) là định dạng được sử dụng nhiều nhất trong công tác đo đạc hiện nay. Thông thường file CSV có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số hiệu điểm (Point ID)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Code</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi chú</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ: </strong></u> Point,X,Y,H,Code<br /> P1,234567.123,1234567.456,15.234,COTDIEN</em><br /> <br /> <u><strong>Ưu điểm</strong></u></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở được bằng Excel.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dung lượng nhỏ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ gửi Email, Zalo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ nhập vào Civil 3D, AutoCAD, QGIS, TBC.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><u><strong>Nhược điểm</strong></u></span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có tiêu chuẩn cấu trúc thống nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hai file CSV có thể chứa các trường dữ liệu khác nhau.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Leica Captivate và CHCNAV LandStar, người dùng có thể tự định nghĩa cấu trúc CSV xuất ra bằng cách thêm hoặc bớt các trường dữ liệu cần thiết.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên.png" style="width: 480px; height: 480px;" /> </span></span></p> <p style="text-align: center;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ví dụ về File tọa độ mốc</span></span></em></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 TXT (*.txt)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">TXT là file dữ liệu dạng văn bản thuần và thường được sử dụng khi:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển dữ liệu giữa các phần mềm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập dữ liệu stakeout.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉnh sửa thủ công bằng Notepad hoặc Notepad++.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ưu điểm lớn nhất là khả năng tùy biến cấu trúc dữ liệu.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 DAT (*.dat)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT là định dạng quen thuộc với nhiều đơn vị thành lập bản đồ địa hình với nhiều ứng dụng như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CASS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập bản đồ địa hình.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại Việt Nam, DAT vẫn là định dạng được sử dụng rất nhiều trong công tác đo vẽ địa hình.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 DXF (*.dxf)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF là định dạng trao đổi dữ liệu CAD. Theo Leica Captivate, DXF được sử dụng để chuyển trực tiếp điểm, đường, layer và các đối tượng CAD giữa hiện trường và văn phòng.<br /> <br /> <strong><u>Ưu điểm</u></strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở trực tiếp trên AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không cần nhập tọa độ thủ công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giữ được nhiều thông tin bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5 KML (*.kml)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML là định dạng của Google Earth với nhiều ứng dụng như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra vị trí điểm ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối chiếu dữ liệu khảo sát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ nhanh vị trí công trình.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Trimble, KML/KMZ là một trong những định dạng phổ biến để trao đổi dữ liệu tọa độ địa lý 3D.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.6 SHP (*.shp)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP (Shapefile) là định dạng GIS được sử dụng trong:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">QGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ArcGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống quản lý dữ liệu không gian.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica Captivate còn cho phép xuất thêm các trường chất lượng điểm đo và thông tin tọa độ vào Shapefile.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7 XLS / XLSX</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số phần mềm cho phép xuất trực tiếp sang Excel với ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ chỉnh sửa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ lập bảng tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp cho hồ sơ hoàn công.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Khi nào nên chọn CSV, DAT, DXF hay SHP?</span></span></h2> <br /> <table border="0" cellpadding="0" style="width: 100%"> <tbody> <tr> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mục đích</span></span></strong><br /> </td> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng khuyến nghị</span></span></strong><br /> </td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gửi tọa độ cho chủ đầu tư</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, XLSX</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập AutoCAD</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT, DXF</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập Civil 3D</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Google Earth</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GIS</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout công trình</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ dữ liệu nhanh</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV</span></span></td> </tr> </tbody> </table> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/c64e8674de5294e51c9bd4133e27d964aede72fb_2_1024x516.png" style="width: 600px; height: 302px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Hướng dẫn xuất dữ liệu trên máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù giao diện giữa Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay Matesurvey (Geomate) có khác nhau nhưng quy trình cơ bản tương đối giống nhau với các bước như sau:<br /> <br /> - <strong>Bước 1</strong>: Mở Project hoặc Job cần xuất.<br /> <br /> - <strong>Bước 2</strong>: Kiểm tra danh sách điểm đã lưu.<br /> <br /> - <strong>Bước 3</strong>:Chọn Export Data.<br /> <br /> - <strong>Bước 4</strong>: Chọn định dạng: <em>CSV; ;TXT; DAT; DXF; KML ; SHP</em><br /> <br /> - <strong>Bước 5</strong>: Kiểm tra cấu trúc dữ liệu xuất. Một số phần mềm cho phép tùy chỉnh:<br /> <em>Point ID<br /> Easting<br /> Northing<br /> Elevation<br /> Code<br /> Rod Height<br /> Antenna Height<br /> PDOP<br /> Trạng thái FIX/FLOAT</em><br /> <br /> - <strong>Bước 6</strong>: Lưu file và kiểm tra lại trước khi gửi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Hướng dẫn nhập dữ liệu vào máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài việc xuất dữ liệu từ máy RTK, nhu cầu nhập dữ liệu vào máy để phục vụ công tác bố trí công trình (Stake Out), dẫn đường hoặc kiểm tra tọa độ cũng rất phổ biến. Hiện nay hầu hết các phần mềm đo đạc như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey), MateSurvey (Geomate) đều hỗ trợ nhập các định dạng phổ biến như:CSV (*.csv); TXT (*.txt); DXF (*.dxf). Trong đó CSV là định dạng được sử dụng nhiều nhất.<br /> <br /> <strong>- Bước 1: </strong>Chuẩn bị File dữ liệu<br /> Xuất dữ liệu từ:AutoCAD; Civil 3D; Excel; QGIS; TBC; Leica Infinityvề định dạng CSV hoặc TXT.<br /> <br /> <strong>- Bước 2: </strong>Chép File vào sổ tay<br /> Có thể thực hiện bằngcáp USB, bluetooth, Wi-Fi, đồng bộ Cloud (tùy thiết bị).<br /> <br /> <strong>- Bước 3: </strong>Nhập dữ liệu<br /> Project > Import > Chọn định dạng file > Chọn file cần nhập.<br /> <br /> <strong>- Bước 4: </strong>Khai báo cấu trúc dữ liệu<br /> Đây là bước quan trọng nhất.Người dùng cần khai báo chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Point ID</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Code</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Leica Captivate và Trimble Access, khi nhập dữ liệu cần kiểm tra chính xác thứ tự cột dữ liệu để tránh sai lệch tọa độ.<br /> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Những lỗi thường gặp khi nhập và xuất dữ liệu RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù việc xuất và nhập dữ liệu trên các phần mềm như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay MateSurvey (Geomate) tương đối đơn giản, nhưng thực tế ngoài công trường vẫn thường xuyên phát sinh các lỗi làm mất thời gian xử lý dữ liệu hoặc thậm chí ảnh hưởng đến kết quả thi công.<br /> Dưới đây là những lỗi phổ biến nhất.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.1 Xuất file thành công nhưng mở ra không có dữ liệu</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá nhiều người dùng RTK từng gặp với các biểu hiện như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File được tạo thành công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có tên dự án hoặc tiêu đề file.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có điểm tọa độ bên trong.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường gặp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Project hoặc Job.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Data File.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đang bật bộ lọc dữ liệu (Filter).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai loại điểm cần xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Database không chứa dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Kiểm tra lại Point Database.<br /> - Kiểm tra đúng Project đang làm việc.<br /> - Tắt các bộ lọc dữ liệu trước khi xuất.<br /> - Chọn xuất toàn bộ điểm (All Points).<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.2 File đuôi .CSV mở ra bằng excel nhưng hiển thị trống hoặc sai cột</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biểu hiện thường thấy:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File vẫn có dung lượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel mở được nhưng dữ liệu dồn vào một cột.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tưởng rằng file bị lỗi hoặc mất dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel đọc sai dấu phân cách dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File sử dụng dấu "," trong khi máy tính đang cấu hình dấu ";" hoặc ngược lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mã hóa ký tự (Encoding).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Mở thử bằng Notepad hoặc Notepad++.<br /> - Sử dụng chức năng Import Data / From Text trong Excel.<br /> - Kiểm tra lại dấu phân cách dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.3 CSV của người khác có nhiều cột hơn hoặc ít cột hơn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều người cho rằng CSV là định dạng cố định. Thực tế không phải vậy. Một file CSV có thể chỉ chứa:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point ID ( Số hiệu điểm)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting ( Tọa đọ X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing ( Tọa độ Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation ( Cao độ)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài các trường dữ liệu cơ bản như <strong>Số hiệu điểm, Tọa độ X, Tọa độ Y và Cao độ H</strong>, nhiều phần mềm RTK còn cho phép xuất thêm các thông tin như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mã điểm (Code)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao sào (Rod Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao ăng-ten (Antenna Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số PDOP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm (Fix Status)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc phương vị (Azimuth)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô tả hoặc ghi chú điểm (Description)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân là do cấu hình định dạng xuất dữ liệu của từng phần mềm hoặc từng đơn vị sử dụng. Đây không phải lỗi dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.4 Nhập dữ iệu thành công nhưng điểm nằm sai vị trí</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi nguy hiểm nhất vì rất khó phát hiện nếu không kiểm tra lại.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhầm thứ tự cột X và Y.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục VN-2000.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai đơn vị tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ:</strong></u><br /> Đúng: Point,X,Y,H<br /> P1,234567.123,1234567.456,10.123<br /> <br /> Sai: Point,Y,X,H<br /> P1,1234567.456,234567.123,10.123</em><br /> <br /> Kết quả là điểm có thể xuất hiện cách vị trí thực hàng chục hoặc hàng trăm kilomet.<br /> <br /> <strong>Cách xử lý:</strong><br /> - Kiểm tra lại cấu trúc file.<br /> - Kiểm tra đúng thứ tự Easting và Northing.<br /> - Kiểm tra hệ tọa độ công trình.<br /> - Đối chiếu với một điểm khống chế đã biết.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.5 Nhập dữ liệu thành công nhưng không nhìn thấy điểm</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lúc này máy báo nhập dữ liệu thành công, danh sách điểm vẫn có nhưng không nhìn thấy điểm trên bản đồ.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nằm ngoài phạm vi hiển thị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai Projection.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Zoom Extents.<br /> - Kiểm tra lại hệ tọa độ.<br /> - Kiểm tra lại Projection và KTT.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.6 Nhập dữ liệu định dạng DXF nhưng không hiển thị đối tượng</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lỗi này xảy ra do những nguyên nhân như:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer đang tắt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF không tương thích.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng nằm ngoài vùng hiển thị.</span></span></li> </ul> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cách xử lý:</span></span></strong><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Layer.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thử lưu lại DXF phiên bản thấp hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Zoom Extents để kiểm tra toàn bộ bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> CSV, TXT, DAT, DXF, KML hay SHP đều là những định dạng dữ liệu quan trọng trong công tác đo đạc hiện đại. Không có định dạng nào là "tốt nhất" cho mọi trường hợp. Lựa chọn đúng định dạng xuất dữ liệu sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thời gian xử lý văn phòng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế lỗi chuyển đổi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả phối hợp giữa khảo sát, thiết kế và thi công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm rủi ro mất dữ liệu hoặc bàn giao sai định dạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế hiện nay, CSV vẫn là định dạng phổ biến nhất nhờ tính linh hoạt, dễ sử dụng và khả năng tương thích với hầu hết các phần mềm đo đạc, CAD và GIS.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/588632958_1241954074621445_1455996422080404648_n.jpg" style="width: 747px; height: 420px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '2026060609425746cdab6ee8d08331f2369b4b04a4a4d5.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Định dạng file RTK: CSV, DAT, DXF, KML, SHP và Cách Xuất, Nhập Dữ Liệu', 'meta_key' => '', 'meta_des' => 'Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.', 'created' => '2026-06-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '877', 'slug' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '545', 'rght' => '546', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '816', 'name' => 'Sửa chữa máy thủy bình bị rơi, va đập – Nguyên nhân gây đo sai ngoài công trường', 'code' => null, 'alias' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-–-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> <br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy. Đây được xem như “trái tim” của máy thủy bình tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850337449414_cbf23e5b4edf679eed8636152be1bb10.jpg" style="width: 600px; height: 800px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cụm cân bằng tự động hoạt động theo nguyên lý trọng lực với hệ thống con lắc treo bằng dây cực nhỏ kết hợp cơ cấu giảm dao động từ tính để giữ tia ngắm luôn nằm ngang. Nhờ đó máy có thể tự cân bằng nhanh và cho độ chính xác cao ngoài công trường. Tuy nhiên, cấu tạo này cũng khá nhạy với va đập. Chỉ một cú rơi hoặc vận chuyển mạnh cũng có thể gây các lỗi như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Liệt rung cụm compensator.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhảy rung hoặc kẹt rung.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xoắn hoặc lệch dây treo con lắc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số cao độ tăng bất thường.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế sửa chữa, phần lớn các trường hợp máy thủy bình đo sai sau va đập đều liên quan trực tiếp đến cụm cân bằng tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850429563246_858468dda57655643001cdc5b7476042.jpg" style="width: 600px; height: 800px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Một số dấu hiệu nhận biết máy thủy bình bị sai sau va đập</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi máy thủy bình bị rơi, va đập hoặc vận chuyển mạnh, nếu xuất hiện các dấu hiệu dưới đây thì nên kiểm tra ngay cụm cân bằng tự động bên trong máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả chênh lệch bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng một vị trí nhưng đo nhiều lần ra số khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số rất lớn, thậm chí lệch đến hàng mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy vẫn đọc mia bình thường nhưng cao độ không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi lắc nhẹ máy không còn nghe tiếng rung “roong roong” êm như lúc mới mua.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, cụm con lắc bên trong đã bị:<br /> <br /> • Liệt rung<br /> • Kẹt rung<br /> • Xoắn dây treo<br /> • Hoặc mất khả năng cân bằng tự động<br /> <br /> Điều nguy hiểm là bên ngoài máy vẫn có thể hoạt động “có vẻ bình thường”, khiến người dùng khó phát hiện nếu không kiểm tra sai số trước khi thi công. Vì vậy, sau mỗi lần máy bị va đập, nên kiểm tra sai số góc i hoặc test đo đi – đo về trước khi tiếp tục sử dụng ngoài công trường.<br /> <br /> Khuyến nghị sau khi thiết bị bị va đập:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy và ốc cân bằng bằng cách quay máy 180° để quan sát độ dịch chuyển bọt thủy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai số góc i bằng phương pháp hai mia hoặc thử nghiệm đối chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không tiếp tục đo công trình khi chưa xác định chính xác tình trạng thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì chỉ một máy bị lệch cũng có thể truyền sai số cho toàn bộ số liệu ngoài công trường.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (6).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 420px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Qui trình sửa chữa máy thủy bình tại Trắc địa Thành Đạt</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bước 1: Tiếp nhận và kiểm tra tổng thể thiết bị.<br /> Bước 2: Kiểm tra cụm treo con lắc và cụm cân bằng tự động.<br /> Bước 3: Báo lỗi, báo giá sửa chữa và hiệu chỉnh.<br /> Bước 4: Cân chỉnh cụm compensator — công đoạn quan trọng nhất.<br /> Bước 5: Hiệu chỉnh sai số góc i.<br /> Bước 6: Kiểm tra thực địa sau sửa chữa.<br /> Bước 7: Dán tem kiểm nghiệm trước khi bàn giao cho khách hàng.<br /> <br /> Một máy thủy bình bị lệch không chỉ làm sai một điểm đo… mà có thể truyền sai số cho toàn bộ tuyến hoặc số liệu ngoài công trường.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Q&A - Kiểm tra máy thủy bình/ thủy chuẩn sau khi bị rơi, va đập</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy thủy bình bị rơi/ va đập có cần kiểm tra lại không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Đây là bước rất quan trọng trước khi tiếp tục thi công vì chỉ một sai lệch nhỏ trên máy thủy bình cũng có thể ảnh hưởng đến toàn bộ số liệu cao độ ngoài công trường. Nhiều trường hợp máy vẫn đọc mia bình thường nhưng thực tế tia ngắm đã bị sai lệch sau va đập.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi bị rơi máy thủy bình thường gặp những lỗi gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số lỗi phổ biến gồm:<br /> • Lệch bọt thủy.<br /> • Sai số góc i lớn.<br /> • Liệt rung hoặc nhảy rung cụm cân bằng tự động.<br /> • Nhìn mia hoặc mục tiêu không rõ.<br /> • Hư ốc cân bằng, vi động hoặc đế máy.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình bị lệch bọt thủy?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường do vận chuyển không đúng cách hoặc máy bị tác động mạnh khiến hệ thống cân bằng thay đổi vị trí, dẫn đến máy khó cân bằng hoặc cân bằng nhưng số đo không ổn định.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sai số góc i trên máy thủy bình là gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i là tình trạng tia ngắm không còn nằm ngang chuẩn. Khi đó đo đi – đo về có thể cho kết quả khác nhau và sai số cao độ tăng bất thường. Đây là lỗi rất phổ biến sau khi máy thủy bình bị va đập.</span></span></p> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Sai số góc i.png" style="width: 665px; height: 295px;" /></h3> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>“Liệt rung” hoặc “nhảy rung” là gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi liên quan đến cụm cân bằng tự động (Automatic Compensator) bên trong máy thủy bình. Cụm con lắc bên trong có thể bị: đứt dây treo, xoắn dây, kẹt rung hoặc lệch cơ cấu giảm dao động từ tính. <br /> Khi đó máy không còn tự cân bằng chính xác dù vẫn có thể đọc mia bình thường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850459087569_e24952711404d15f27d74612fb6b68f7.jpg" style="width: 460px; height: 219px;" /></span></span></p> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Dây rung máy thủy bình</em></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình nhìn mia không rõ sau va chạm?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân có thể do:<br /> <br /> • Kính bị bẩn hoặc trầy xước.<br /> • Hệ thống lấy nét bị ảnh hưởng.<br /> • Cụm quang học bị lệch sau va đập.<br /> <br /> Nếu không kiểm tra sớm có thể ảnh hưởng trực tiếp đến độ chính xác đo đạc.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy bị hư ốc cân bằng hoặc đế máy có nghiêm trọng không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Nếu máy bị rơi mạnh, các bộ phận cơ khí như: vi động, ốc cân bằng, đế máy… có thể bị cong, nứt hoặc biến dạng khiến việc cân bằng và đo đạc không còn chính xác như ban đầu.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi máy thủy bình bị rơi nên làm gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy, kiểm tra sai số góc i và cụm con lắc tự động trước khi tiếp tục đo công trình. </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm để tránh truyền sai số cho toàn bộ số liệu thi công. </span></p> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <strong style="margin: 0px; padding: 0px; font-weight: bold;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><a href="https://zalo.me/0913051734">Trắc Địa Thành Đạt</a> – Cung cấp máy thủy bình chính hãng!</span></span></strong></p> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Hotline: <strong style="margin: 0px; padding: 0px; font-weight: bold;">0913 051 734 / 0942 288 388</strong></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Địa chỉ: 145 Láng Hạ – Đống Đa – Hà Nội<br style="margin: 0px; padding: 0px;" /> Fanpage: Trắc Địa Thành Đạt</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '20260521180410f10bb16a2b4a9dbcb155bfe047377890.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Sửa Chữa Máy Thủy Bình Bị Rơi, Va Đập – Nguyên Nhân Gây Đo Sai & Cách Khắc Phục!', 'meta_key' => '', 'meta_des' => 'Máy thủy bình bị rơi, va đập dễ gây liệt rung, nhảy rung, sai số góc i và đo cao độ sai. Tìm hiểu nguyên nhân, dấu hiệu nhận biết và quy trình sửa chữa – hiệu chỉnh máy thủy bình tại Trắc Địa Thành Đạt.', 'created' => '2026-05-21', 'modified' => '2026-07-12', 'status' => '1', 'view' => '910', 'slug' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '543', 'rght' => '544', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '815', 'name' => 'Đo hầm bằng máy toàn đạc: So sánh Tunnel App Leica và giải pháp của các hãng khác', 'code' => null, 'alias' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi nói đến đo hầm bằng máy toàn đạc, thách thức lớn nhất không nằm ở thao tác đo… mà ở việc kiểm soát sai số và tiến độ thi công ngay tại hiện trường.</span></span>', 'content' => '<p> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong các công trình hầm, metro hoặc hạ tầng ngầm, đo hầm bằng máy toàn đạc là phương pháp gần như bắt buộc do không thể sử dụng GNSS. </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tuy nhiên, thách thức lớn nhất không nằm ở việc đo được điểm, mà là kiểm soát sai số và phát hiện sai lệch kịp thời ngay tại hiện trường. Nếu sai số chỉ được phát hiện sau khi xử lý dữ liệu tại văn phòng, việc hiệu chỉnh sẽ trở nên tốn kém và ảnh hưởng trực tiếp đến tiến độ thi công. </span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chính vì vậy, các hãng thiết bị trắc địa đã phát triển nhiều giải pháp khác nhau nhằm hỗ trợ kỹ sư kiểm soát tốt hơn trong quá trình đo hầm.</span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Tunnel App trên máy toàn đạc Leica FlexLine</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 Tunnel App là gì?</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tunnel App là module phần mềm tích hợp trong hệ điều hành FlexField trên các dòng máy toàn đạc Leica FlexLine như TS03 và TS07.<br /> <br /> Ứng dụng này cho phép người dùng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nạp dữ liệu thiết kế tuyến và biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực hiện stakeout trực tiếp ngoài hiện trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo profile và kiểm tra đào – đắp (cut & fill)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh sai lệch với thiết kế ngay trên máy</span></span></li> </ul> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.2 Ưu điểm của Tunnel App</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với phương pháp đo truyền thống, Tunnel App mang lại một số lợi ích rõ rệt:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thao tác trung gian giữa hiện trường và văn phòng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hiển thị sai lệch trực quan theo biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ phát hiện sai số ngay trong quá trình đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng tốc độ thi công và kiểm tra</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nổi bật của Leica là khả năng tích hợp toàn bộ workflow ngay trên thiết bị, phù hợp với các công trình cần triển khai nhanh ngoài hiện trường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Quy trình đo hầm ngoài công trường</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị của Leica, Trimble, Topcon hay các hãng khác, quy trình đo hầm bằng máy toàn đạc ngoài công trường về bản chất vẫn tuân theo một nguyên tắc chung: t<strong>hiết lập đúng – bố trí đúng – kiểm tra liên tục.</strong><br /> <br /> Bước đầu tiên và quan trọng nhất là <strong>thiết lập trạm máy</strong>. Kỹ sư trắc địa cần đặt máy tại vị trí khống chế đã biết tọa độ và định hướng bằng phương pháp <strong>backsight hoặc resection</strong>. Độ chính xác của bước này có ảnh hưởng trực tiếp đến toàn bộ tuyến hầm, bởi chỉ cần sai lệch nhỏ ở định hướng ban đầu cũng có thể dẫn đến sai số tích lũy theo chiều dài công trình.<br /> <br /> Sau khi trạm máy được thiết lập chính xác, dữ liệu thiết kế sẽ được nạp vào hệ thống. Các thông tin bao gồm tim tuyến (alignment), lý trình và biên dạng hầm (cross-section) đóng vai trò làm cơ sở để thực hiện stakeout ngoài thực địa. Ở giai đoạn này, việc kiểm tra lại hệ tọa độ, đơn vị và hướng tuyến là cần thiết nhằm tránh các sai sót do nhập liệu hoặc chuyển đổi dữ liệu.<br /> <br /> Trong quá trình thi công, các điểm đặc trưng của biên dạng hầm sẽ được bố trí trực tiếp ngoài hiện trường thông qua máy toàn đạc. Người đo sẽ lần lượt xác định vị trí các điểm theo thiết kế và hướng dẫn thi công đào hầm theo đúng hình học yêu cầu. Tuy nhiên, việc “bố trí đúng” chưa phải là bước cuối cùng.<br /> <br /> Khâu kiểm tra mới là yếu tố quyết định chất lượng. Các điểm sau khi bố trí cần được đo lại và so sánh với thiết kế bằng các phép đo lặp hoặc thông qua các công cụ kiểm tra trên máy. Việc này giúp phát hiện sớm các sai lệch về vị trí, cao độ hoặc hình dạng biên dạng hầm, từ đó kịp thời điều chỉnh trước khi sai số bị tích lũy.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/LGS_streamline_tunnel_construction_and_maintenance_2480x750.jpg" style="width: 800px; height: 242px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế, nhiều sai số lớn trong thi công hầm không đến từ thiết bị, mà đến từ việc không kiểm tra hoặc kiểm tra quá muộn. Vì vậy, một quy trình đo hầm hiệu quả luôn phải đảm bảo nguyên tắc: đo đến đâu, kiểm tra đến đó.<br /> <br /> Sự khác biệt giữa các hãng thiết bị hiện nay chủ yếu nằm ở mức độ hỗ trợ người dùng trong từng bước của quy trình này. Tuy nhiên, dù sử dụng công nghệ nào, cốt lõi của đo hầm bằng máy toàn đạc vẫn không thay đổi: <strong>Thiết lập chuẩn – dữ liệu đúng – kiểm tra liên tục.</strong></span></span> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. So sánh các giải pháp đo hầm của các hãng</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Leica – All-in-one tại hiện trường</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica là hãng đi theo hướng tích hợp toàn bộ quy trình đo hầm vào một ứng dụng duy nhất. Tunnel App giúp người dùng thực hiện liên tục các bước từ nạp dữ liệu, bố trí đến kiểm tra ngay tại hiện trường mà không cần phụ thuộc nhiều vào xử lý hậu kỳ.<br /> Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình thi công nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đội thi công cần thao tác đơn giản, trực quan.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica App Tunnel 3.jpg" style="width: 800px; height: 428px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Trimble – Hệ sinh thái và xử lý thiết kế</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trimble sử dụng phần mềm Trimble Access kết hợp với module Tunnels chuyên dụng. Giải pháp này tập trung vào khả năng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý alignment phức tạp</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối với phần mềm thiết kế như TBC</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý dữ liệu trong các dự án lớn</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự án metro, hầm quy mô lớn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu đồng bộ BIM</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Trimple tunnel.jpg" style="width: 800px; height: 446px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Topcon – Linh hoạt theo workflow</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không giống Leica, <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu-topcon-gm-50-series.html">Topcon</a> không phát triển một module “Tunnel App” riêng biệt cho dòng máy toàn đạc. Thay vào đó, hãng lựa chọn hướng tiếp cận linh hoạt hơn thông qua phần mềm <strong>MAGNET Field</strong>. Trong thực tế, công tác đo hầm bằng máy toàn đạc Topcon được thực hiện bằng cách kết hợp nhiều chức năng sẵn có như alignment, stakeout, offset và kiểm tra profile.<br /> <br /> <strong>Workflow điển hình trên Topcon</strong><br /> <br /> Người dùng sẽ bắt đầu bằng việc nạp dữ liệu tuyến (alignment) và các thông số thiết kế vào phần mềm. Sau khi thiết lập trạm máy, quá trình stakeout được thực hiện thông qua các điểm tuyến và các khoảng lệch (offset) theo biên dạng hầm. <br /> Đối với kiểm tra hình học, kỹ sư thường đo lại các điểm trên biên dạng thực tế và so sánh với thiết kế thông qua các công cụ kiểm tra trong phần mềm hoặc xử lý hậu kỳ.<br /> <br /> <strong>Ưu điểm của cách tiếp cận này</strong><br /> <br /> Điểm mạnh lớn nhất của Topcon là tính linh hoạt. Người dùng có thể tùy biến quy trình đo theo từng loại công trình mà không bị giới hạn bởi một module cố định. Điều này đặc biệt hữu ích trong các dự án có yêu cầu đặc thù hoặc khi dữ liệu thiết kế không theo một chuẩn cố định.<br /> <br /> <strong>Hạn chế cần lưu ý</strong><br /> <br /> Tuy nhiên, việc không có một module tunnel chuyên dụng cũng đồng nghĩa với việc:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy trình đo phụ thuộc nhiều vào kinh nghiệm người sử dụng,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc kiểm tra sai số không trực quan bằng các hệ thống tích hợp,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần hiểu rõ workflow để tránh sai sót trong quá trình triển khai.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nói cách khác, Topcon không làm “ít hơn”, nhưng yêu cầu người dùng phải “hiểu nhiều hơn”.</span></span><br /> <br /> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel.jpg" style="text-align: center; font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 800px; height: 533px;" /></h3> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.4 Nikon / Sokkia – Phương pháp truyền thống</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các dòng máy của Nikon và Sokkia chủ yếu sử dụng phương pháp truyền thống:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout cơ bản</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo và kiểm tra thủ công</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giải pháp này vẫn đáp ứng tốt các công trình quy mô nhỏ, nhưng hạn chế khi cần xử lý các dự án phức tạp.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Sự khác biệt cốt lõi trong đo hầm và yếu tố ảnh hưởng tới độ chính xác</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm khác biệt quan trọng nhất giữa các giải pháp không nằm ở khả năng đo, mà nằm ở thời điểm phát hiện sai số.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp truyền thống: phát hiện sai sau khi đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm tích hợp (Tunnel App, Tunnels Module): phát hiện sai ngay trong quá trình đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc phát hiện sai số sớm giúp giảm chi phí hiệu chỉnh và hạn chế rủi ro trong thi công.<br /> </span></span> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Những yếu tố ảnh hưởng đến độ chính xác</strong></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị hay phần mềm nào, độ chính xác trong đo hầm vẫn phụ thuộc vào:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định hướng trạm máy (backsight)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện môi trường ảnh hưởng đến đo EDM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số truyền tọa độ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kỹ năng và thao tác của người sử dụng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các phần mềm hiện đại chỉ đóng vai trò hỗ trợ, không thể thay thế hoàn toàn quy trình kiểm soát kỹ thuật ngoài công trường.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel 2.jpg" style="width: 800px; height: 415px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Đo hầm bằng máy toàn đạc đã có sự chuyển dịch rõ rệt từ phương pháp thủ công sang các giải pháp tích hợp và trực quan hơn. Tunnel App của Leica là một ví dụ điển hình cho xu hướng đưa việc kiểm soát sai số xuống ngay tại hiện trường. Trong khi đó, các hãng khác như Trimble, Topcon hay Nikon lựa chọn những hướng tiếp cận khác nhau, phù hợp với từng loại công trình và nhu cầu sử dụng.<br /> Tuy nhiên, yếu tố quan trọng nhất vẫn là: Hiểu đúng quy trình đo và chủ động kiểm soát sai số trong suốt quá trình thi công<br /> <br /> Nếu bạn cần tư vấn lựa chọn máy toàn đạc hoặc giải pháp đo hầm phù hợp với công trình, liên hệ ngay với chúng tôi!<br /> <br /> <span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt – Luôn đồng hành cùng bạn!</strong></span><br /> </span></span>', 'images' => '202604231558382137741e17c2868ead929b32a270f9f6.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Đo hầm bằng máy toàn đạc: Leica Tunnel App và các hãng khác', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách đo hầm bằng máy toàn đạc Leica với Tunnel App và so sánh với Trimble, Topcon, Nikon. Quy trình, ưu nhược điểm và cách kiểm soát sai số ngoài công trường.', 'created' => '2026-04-23', 'modified' => '2026-07-12', 'status' => '1', 'view' => '1482', 'slug' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '541', 'rght' => '542', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '814', 'name' => 'Máy toàn đạc điện tử: ĐO CHUẨN – BỐ TRÍ NHANH – ỔN ĐỊNH NGOÀI CÔNG TRƯỜNG!', 'code' => null, 'alias' => 'may-toan-dac-dien-tu-do-chuan-–-bo-tri-nhanh-–-on-dinh-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> Tại <strong>Trắc Địa Thành Đạt</strong>, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> <br /> Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Vì sao máy toàn đạc vẫn là thiết bị không thể thay thế?</span></span></h2> <br /> <p data-end="216" data-start="105"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong điều kiện thi công thực tế tại Việt Nam, nhiều khu vực thường gặp hạn chế về khả năng đo GNSS, chẳng hạn:</span></span></p> <ul data-end="407" data-start="218"> <li data-end="296" data-section-id="3ju1r3" data-start="218"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không gian bị che khuất bởi nhà cao tầng, công trình dày đặc hoặc tầng hầm</span></span></li> <li data-end="337" data-section-id="k3xm0j" data-start="297"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu vệ tinh yếu hoặc nhiễu mạnh</span></span></li> <li data-end="407" data-section-id="utqol9" data-start="338"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Yêu cầu độ chính xác cao đến milimet trong quan trắc và hoàn công.</span></span></li> </ul> <p data-end="491" data-start="409"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong những trường hợp này, máy toàn đạc vẫn là giải pháp hiệu quả và ổn định nhờ:</span></span></p> <ul data-end="665" data-start="493"> <li data-end="553" data-section-id="1rjirb8" data-start="493"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng đo khoảng cách chính xác cao bằng công nghệ EDM</span></span></li> <li data-end="594" data-section-id="1tziawf" data-start="554"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phụ thuộc vào tín hiệu vệ tinh</span></span></li> <li data-end="665" data-section-id="rakyqa" data-start="595"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm soát chặt chẽ công tác bố trí điểm và thi công ngoài thực địa.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hai chức năng cốt lõi của máy toàn đạc</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 Đo điểm (Measurement)</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là chức năng cơ bản và quan trọng nhất của máy toàn đạc trong công tác khảo sát. Máy thực hiện đo các yếu tố hình học gồm:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc ngang (Horizontal Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc đứng (Vertical Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách (EDM – Electronic Distance Measurement)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ các giá trị này, hệ thống sẽ tính toán và xác định tọa độ không gian của điểm đo dưới dạng (X, Y, Z).<br /> <br /> Ngoài ra, máy toàn đạc hiện đại còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo không gương (Non-prism) trong điều kiện khó tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu trữ và quản lý dữ liệu điểm đo trực tiếp trên máy</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xuất dữ liệu phục vụ xử lý nội nghiệp (CAD, TBC, Civil 3D…)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát địa hình, đo vẽ bản đồ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo hiện trạng công trình, kiểm tra kích thước</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lập lưới khống chế và thu thập dữ liệu phục vụ thiết kế</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica-Nova-TS60-BC-facing-right.jpg" style="width: 750px; height: 258px;" /></span></span><span style="display: none;"> </span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 Bố trí điểm (Stakeout)</span></span></h3> <p data-end="1067" data-start="941"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí điểm là quá trình chuyển thông tin từ bản vẽ thiết kế ra vị trí ngoài thực địa, đóng vai trò quan trọng trong thi công.</span></span></p> <p data-end="1114" data-start="1069"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựa trên tọa độ thiết kế, hệ thống thực hiện:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh tọa độ thiết kế với vị trí thực tế của gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán sai lệch theo các phương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn người đo di chuyển theo các chỉ dẫn:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trái / phải</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tiến / lùi</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lên / xuống</span></span></li> </ul> </li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhờ đó, điểm ngoài thực địa được đưa về đúng vị trí thiết kế với độ chính xác cao.<br /> <br /> Ngoài ra, các dòng máy hiện nay còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí tuyến, cung tròn (Road / Arc stakeout)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí theo lưới, theo tim trục</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai lệch sau thi công (As-built check)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định vị tim trục công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí móng, cột, dầm, sàn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thi công hạ tầng, giao thông, công trình kỹ thuật</span></span></li> </ul> <h2 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/image (11).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 660px; height: 371px;" /></h2> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Những lỗi đo cạnh thường gặp và cách xử lý</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Nguyên lý đo cạnh của máy toàn đạc</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc xác định khoảng cách bằng cách:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát tín hiệu laser hoặc hồng ngoại đến gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận tín hiệu phản xạ quay về</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán khoảng cách dựa trên thời gian truyền (Time of Flight) hoặc độ lệch pha (Phase Measurement).</span></span></li> </ul> </li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các hãng như Leica, Topcon, Nikon hay Trimble đều sử dụng nguyên lý này, chỉ khác nhau về công nghệ xử lý tín hiệu và thuật toán nội bộ.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Các nguyên nhân gây lỗi đo cạnh</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.1 Suy giảm hệ đo EDM<br /> <br /> Đây là nguyên nhân phổ biến nhất trong thực tế. Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo lặp lại cho kết quả khác nhau</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách “nhảy số”, không ổn định</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Linh kiện EDM xuống cấp theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát yếu hoặc bộ thu tín hiệu kém</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Làm việc trong điều kiện ánh sáng mạnh hoặc phản xạ kém</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo tài liệu của Leica Geosystems, độ chính xác đo cạnh phụ thuộc lớn vào cường độ tín hiệu phản xạ và điều kiện môi trường.<br /> <br /> 3.2.2 Lệch trục EDM – trục ngắm (Collimation error)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo gần tương đối đúng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo xa sai lệch tăng dần</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bị va đập, rung lắc trong quá trình sử dụng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lâu không hiệu chuẩn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai lệch cơ khí tích lũy</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số này ảnh hưởng rõ rệt khi đo khoảng cách lớn, đặc biệt trong các công trình yêu cầu độ chính xác cao.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lỗi đo cạnh ( trục) 2.png" style="width: 680px; height: 295px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.3 Sai hằng số gương (Prism constant)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số gần như cố định trên mọi khoảng cách</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng sai loại gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai giá trị hằng số gương (0, -30, +17.5 mm…)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Trimble, việc thiết lập đúng prism constant là điều kiện bắt buộc để đảm bảo độ chính xác đo cạnh.<br /> <br /> 3.2.4 Ảnh hưởng môi trường đo<br /> <br /> Các yếu tố môi trường có thể ảnh hưởng đáng kể đến kết quả đo:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiệt độ và áp suất (P/T)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiễu khí quyển</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bề mặt phản xạ kém (tường sơn tối, bề mặt ướt, kim loại)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo khuyến nghị của FIG, sai số EDM tăng lên đáng kể trong điều kiện khí quyển không ổn định.<br /> <br /> 3.2.5 Sai số do thao tác người dùng<br /> <br /> Đây là nhóm lỗi rất phổ biến ngoài công trường.Bao gồm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựng sào không thẳng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai chiều cao gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập sai trạm máy hoặc điểm định hướng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình hệ tọa độ không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số do người dùng thường khó nhận biết nếu không có quy trình kiểm tra chéo.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Cách khắc phục</span></span></h3> <br /> <ul> <li data-end="2098" data-section-id="zvrhg8" data-start="2066"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra EDM, 2C, MO định kỳ</span></span></li> <li data-end="2130" data-section-id="uu2tiv" data-start="2099"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng đúng prism constant</span></span></li> <li data-end="2172" data-section-id="nwvnt0" data-start="2131"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm tra cạnh chuẩn trước thi công</span></span></li> <li data-end="2209" data-section-id="ux2ibp" data-start="2173"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh đo trong điều kiện bất lợi</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Các dòng máy toàn đạc phổ biến</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Leica</strong><br /> <br /> Leica là thương hiệu cao cấp trong lĩnh vực trắc địa, nổi bật với độ chính xác và độ ổn định lâu dài. Hệ EDM mạnh, khả năng làm việc tốt trong nhiều điều kiện môi trường khác nhau, đặc biệt phù hợp với các công trình yêu cầu kỹ thuật cao.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao, ổn định theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ EDM mạnh, ít bị ảnh hưởng bởi môi trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm và thuật toán xử lý tốt</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình cao tầng, cầu đường, quan trắc, dự án yêu cầu kiểm soát sai số chặt chẽ.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Leica toàn đạc.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Topcon</strong><br /> <br /> Topcon là dòng máy phổ biến nhờ sự cân bằng giữa hiệu năng và chi phí. Thiết bị dễ sử dụng, độ bền tốt, đáp ứng đa dạng nhu cầu thi công ngoài công trường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, thao tác nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ ổn định tốt trong điều kiện công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chi phí hợp lý</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, hạ tầng, thi công phổ thông.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z6599539340575_12c3eac505cba39e86905990604ee094.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nikon</strong><br /> <br /> Nikon là lựa chọn phù hợp cho các đơn vị cần thiết bị đo đạc cơ bản với chi phí đầu tư thấp. Thiết kế đơn giản, dễ tiếp cận và đáp ứng tốt các công việc đo đạc thông thường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giá tốt, dễ tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, phù hợp người mới</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền ổn định</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, khảo sát cơ bản.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/DTM 352 Nikon 2.jpg" style="width: 680px; height: 509px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Sokkia</strong><br /> <br /> Sokkia có cùng hệ sinh thái với Topcon, nổi bật về độ bền và khả năng làm việc ổn định trong điều kiện công trường khắc nghiệt. Thiết bị được đánh giá cao về tính “lành”, ít lỗi vặt.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền cao, ổn định lâu dài</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động tốt trong môi trường khắc nghiệt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác đáp ứng tốt thi công</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình hạ tầng, công trường làm việc cường độ cao.<br /> <br /> <strong>Trimble</strong><br /> <br /> Trimble tập trung mạnh vào giải pháp tích hợp và hệ sinh thái phần mềm. Các dòng máy toàn đạc của Trimble nổi bật ở khả năng kết nối, xử lý dữ liệu và làm việc đồng bộ với GNSS.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ sinh thái phần mềm mạnh (Access, TBC…)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tích hợp GNSS và quản lý dữ liệu tốt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp quy trình làm việc hiện đại</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Dự án lớn, doanh nghiệp cần đồng bộ dữ liệu và quản lý thi công<br /> <br /> > Mỗi thương hiệu đều có định hướng và thế mạnh riêng. Việc lựa chọn nên dựa trên nhu cầu thực tế, điều kiện công trường và yêu cầu kỹ thuật của từng dự án để đạt hiệu quả tối ưu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cách chọn máy toàn đạc phù hợp công trình</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc lựa chọn máy toàn đạc cần dựa vào yêu cầu kỹ thuật và điều kiện thi công thực tế, thay vì chỉ nhìn vào thương hiệu hoặc giá thành.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình dân dụng, hạ tầng cơ bản</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với các dòng Nikon hoặc Topcon nhờ dễ sử dụng, độ ổn định tốt và chi phí hợp lý. Đáp ứng hiệu quả cho các công việc đo đạc, bố trí thông thường.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu độ chính xác cao</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên ưu tiên Leica hoặc các dòng cao cấp, với độ chính xác và độ ổn định cao, phù hợp cho nhà cao tầng, kết cấu thép hoặc các hạng mục cần kiểm soát sai số chặt chẽ.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quan trắc, kiểm soát biến dạng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lựa chọn máy có độ chính xác cao và hệ EDM ổn định, đảm bảo khả năng lặp lại kết quả trong nhiều chu kỳ đo.<br /> <br /> Nguyên tắc quan trọng: Lựa chọn đúng thiết bị theo nhu cầu thực tế sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm sai số trong đo đạc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tối ưu chi phí đầu tư</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nâng cao hiệu quả thi công</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo chất lượng công trình</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Tại sao nên mua máy toàn đạc tại Trắc địa Thành Đạt?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi cung cấp đa dạng các loại máy toàn đạc của các hãng <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu">Leica</a>, Nikon, Topcon, đáp ứng nhiều nhu cầu khác nhau trong thi công và khảo sát.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tư vấn đúng nhu cầu công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ kỹ thuật ngoài công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn sử dụng, kiểm tra sai số</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cung cấp thiết bị chính hãng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> Bạn đang phân vân giữa các dòng máy toàn đạc? Hoặc gặp lỗi đo cạnh ngoài công trường?<br /> <br /> >>> Liên hệ ngay <a href="https://zalo.me/0913051734"><strong>Trắc Địa Thành Đạt</strong></a> để được tư vấn phù hợp nhất! </span></span>', 'images' => '20260505102744e930c0e340a0ba993987b0238086413c.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử: Báo giá, tư vấn chọn máy chuẩn công trình!', 'meta_key' => '', 'meta_des' => 'Tìm hiểu máy toàn đạc điện tử, cách chọn máy phù hợp công trình. Tư vấn thiết bị chính hãng tại Trắc Địa Thành Đạt!', 'created' => '2026-04-20', 'modified' => '2026-07-11', 'status' => '1', 'view' => '6424', 'slug' => 'may-toan-dac-dien-tu-do-chuan-bo-tri-nhanh-on-dinh-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '539', 'rght' => '540', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $tinlq = array( (int) 0 => array( 'Post' => array( 'id' => '644', 'name' => 'GNSS RTK', 'code' => null, 'alias' => 'gnss-rtk', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; border: 0px; background-image: initial; background-position: 0px 0px; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; outline: 0px; vertical-align: top; color: rgb(0, 0, 0); font-size: 14px; text-align: justify; font-weight: 700 !important;">GNSS RTK</span><span style="color: rgb(0, 0, 0); font-size: 14px; text-align: justify;"> được biết đến là thiết bị dùng trong công tác trắc địa giúp hỗ trợ quá trình khảo sát địa hình. Với khả năng tự động vẽ và lưu lại các khu vực khảo sát giúp nhanh chóng hoàn thiện các bản vẽ đầy đủ, chính xác với các thông số kỹ thuật cần thiết. Đây là thiết bị hỗ trợ đắc lực cho những người làm công tác trắc địa để có thể hoàn thành công việc nhanh chóng, tiết kiệm thời gian và chi phí với độ chính xác cao.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường hiện nay có rất nhiều dòng máy GNSS RTK với sự đa dạng về kiểu dáng thiết kế, các tính năng cũng như kích thước cho khách hàng lựa chọn. Với mỗi sản phẩm sẽ có những đặc tính cũng như công năng riêng phù hợp với nhu cầu sử dụng của từng đối tượng khách hàng cũng như tính chất công việc. Cùng tìm hiểu ưu và nhược điểm của máy GNSS RTK để có cái nhìn tổng quan về nó trước khi bạn lựa chọn đầu tư cho dự án của mình.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <strong>Ưu điểm nổi bật của máy GNSS RTK </strong><br /> <br /> Đảm bảo độ chính xác cao nhất trong quá trình làm việc. Đối với công tác trắc địa thì độ chính xác là thông số quan trọng nhất cần hướng tới trong quá trình làm việc do đó các thiết bị hỗ trợ cũng cần tối ưu hóa được yếu tố này. Với việc áp dụng công nghệ RTK cũng như CORS Network các mẫu máy này đảm bảo mang đến các thông số chuẩn nhất để cung cấp dữ liệu cho quá trình vẽ cũng như hình thành các dữ liệu chung.<br /> <br /> Trong việc sử dụng công nghệ GNSS thì CORS là trạm tham chiếu hoạt động liên tục để tạo sự liên kết các thiết bị với đường truyền tín hiệu. Công nghệ này giúp khoảng cách tối đa giữa trạm gốc và máy định vị GNSS được thiết lập khoảng 10 - 15km, giúp tăng khoảng cách cho hoạt động của máy. Điều này giúp giảm nhân công cũng như chi phí trong quá trình làm việc.<br /> <br /> Với thiết kế nhỏ gọn, dễ dàng di chuyển giúp mang đến sự tiện lợi tối đa trong quá trình sử dụng. <br /> <br /> Một ưu điểm phải kế đến của loại máy GNSS RTK đó là việc tích hợp nhiều tính năng thông minh trong cùng thiết bị. Các tính năng điều khiển bằng giọng nói, bảng điều khiển điện tử, việc thay đổi kích thước máy được tích hợp …giúp dễ dàng sử dụng cũng như có thể thực hiện được nhiều chức năng khác nhau cùng lúc.<br /> <br /> Bộ nhớ trong lớn giúp tăng khả năng lưu trữ thông tin cùng với đó là khả năng kết nối với máy tính, điện thoại, bluetooth hay 3G, 4G giúp nâng cao tối đa được các công năng cũng như sự tiện lợi trong quá trình sử dụng.<br /> <br /> Khả năng kết nối với các thiết bị khác tối ưu cùng với hệ thống CORS.<br /> <br /> Với chất liệu cao cấp có khả năng chống va đập cũng như hạn chế tối đa các tác động của các yếu tố bên ngoài giúp mang đến sản phẩm bền đẹp lâu dài theo thời gian sử dụng.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/phân phối máy định vị vệ tinh 2 tần số rtk (1).png" style="width: 850px; height: 604px;" /><br /> <br /> <strong>Nhược điểm của máy GNSS RTK</strong><br /> <br /> Hiện nay, máy GPS –GNSS RTK chất lượng dù đã được tích hợp đầy đủ các tính năng nhưng để có được độ chính xác tuyệt đối cùng với vi</span>ệc</span> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">thực hiện thêm nhiều công việc khác các bạn cần phải có sự kết nối thêm các thiết bị khác để sử dụng.<br /> <br /> Giới hạn làm việc của máy trong một phạm vi nhất định cũng là một khó khăn trong quá trình sử dụng. Do đó, cần tìm hiểu đầy đủ các thông số của máy trước khi lựa chọn để phù hợp với đặc điểm công việc.<br /> <br /> Giá thành cao cũng là một nhược điểm cần tính đến khi quyết định đầu tư. <br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Máy RTK.png" style="width: 850px; height: 680px;" /><br /> <br /> </span></span>', 'images' => '2021081816133230412c34d3b16d2ec66a3d1eba4d0d89.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Máy RTK, máy định vị vệ tinh RTK, máy GPS RTK, máy định vị vệ tinh GNSS RTK, máy RTK giá rẻ, máy RTK tốt nhất', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-18', 'modified' => '2026-07-12', 'status' => '1', 'view' => '20547', 'slug' => 'gnss-rtk', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '231', 'rght' => '232', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '641', 'name' => 'Phần mềm LandStar 7 và cách cài đặt trên máy tính', 'code' => null, 'alias' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LandStar 7 là một ứng dụng miễn phí được phát triển bởi www.chcnav.com, thuộc danh mục Bản đồ và dẫn đường. </span></span>', 'content' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="294" src="https://www.youtube.com/embed/04hr6Gy-3RE" title="YouTube video player" width="680"></iframe><br /> <br /> LandStar7 là giải pháp phần mềm khảo sát đã được kiểm chứng thực địa mới nhất dành cho mọi thiết bị Android và bộ điều khiển dữ liệu CHCNAV. Được thiết kế cho các nhiệm vụ khảo sát và lập bản đồ có độ chính xác cao, LandStar7 cung cấp khả năng quản lý quy trình làm việc liền mạch, giao diện người dùng đồ họa dễ học và dễ sử dụng để hoàn thành tất cả các dự án của bạn một cách hiệu quả. Các định dạng nhập và xuất dữ liệu toàn diện, nhiều phương pháp đo lường đảm bảo năng suất tức thì.<br /> <br /> - Hỗ trợ nhiều loại định dạng nhập và xuất khác nhau LandStar7 nhập và xuất DXF, DWG, SHP, KML, KMZ, CSV, DAT, TXT cũng như nội dung dữ liệu được tùy chỉnh đầy đủ từ dự án khảo sát lựa chọn các định dạng CSV, DAT và TXT.<br /> <br /> - Xác định vị trí và trực quan hóa dữ liệu dự án của bạn trong nháy mắt LandStar7 tích hợp bản đồ trực tuyến của Google, OSM, BING và WMS để cung cấp thông tin vị trí có ý nghĩa cho các nhà khảo sát và chuyên gia xây dựng. Các dự án được hiển thị trong địa hình khu vực hoặc hình ảnh vệ tinh trong thời gian thực.<br /> <br /> - Rất linh hoạt và sẵn sàng cho nhiều ứng dụng LandStar7 được thiết kế để cung cấp cho bạn các bộ tính năng đặc biệt, từ khảo sát đất đai, các dự án xây dựng và kỹ thuật, lập bản đồ, thu thập dữ liệu GIS, liên quan đến đường đến khảo sát đường ống.<br /> <br /> Giao diện người dùng có thể tùy chỉnh của nó giúp LandStar7 dễ sử dụng bằng cách tập trung vào các chức năng thiết yếu thường được sử dụng. Quy trình phát triển phần mềm linh hoạt Nhóm phát triển LandStar7 của chúng tôi giữ liên lạc thường xuyên với các nhà khảo sát, các chuyên gia xây dựng và mạng lưới đối tác trên toàn thế giới của chúng tôi để mang lại các chức năng vượt trội mới. Khi sử dụng LandStar7 ngay hôm nay, bạn được đảm bảo tận hưởng các tính năng mới thường xuyên mà không phải trả thêm phí.<br /> <br /> <strong>>>></strong> Trong bài viết bên dưới đây chúng tôi sẽ giới thiệu tới bạn cách cài đặt LandStar 7 trên máy tính (PC Windows & Mac). Phương pháp mà chúng tôi áp dụng là sử dụng Bluestacks, công cụ giả lập hệ điều hành Android hàng đầu hiện nay. Tất cả những gì bạn cần chỉ là một chiếc máy tính chạy Windows hoặc Mac.<br /> <br /> <strong>Bước 1:</strong> Tải xuống và cài đặt Bluestacks<br /> Tải phiên bản mới nhất tại đây <a href="https://www.bluestacks.com/vi/index.html" target="_blank">https://www.bluestacks.com/vi/index.html</a>. Trang web này hỗ trợ tiếng Việt nên bạn có thể dễ dàng tải về file cài đặt của Bluestacks. Quá trình tải về có thể mất vài phút.<br /> Sau khi tải về, nhấp chuột vào file bạn mới tải xuống để bắt đầu quá trình cài đặt. Giao diện cài đặt rất đơn giản, quá trình cặt đặt sẽ diễn ra nhanh chóng. Nếu có bất cứ vấn đề gì bạn có thể vào mục hỏi đáp của Bluestacks để tham khảo cách xử lý.<br /> <br /> <strong>Bước 2:</strong> Tải xuống file cài đặt của LandStar 7 cho máy tính PC Windows<br /> File cài đặt này có đuôi là .APK. APK là viết tắt của cụm từ tiếng Anh "Android application package" (tạm dịch là bộ cài đặt ứng dụng cho hệ điều hành Android). Bạn có thể tải về file apk này từ trang web của chúng tôi <a href="https://drive.google.com/file/d/1vSHDZvVz9EjJtpVAeKgVzJaua3D-Wwf1/view?usp=sharing">TẠI ĐÂY</a>.<br /> <br /> <strong>Bước 3:</strong> Tiến hành cài đặt LandStar 7 bằng Bluestacks<br /> Tập tin APK của LandStar 7 sau khi tải về có thể được cài đặt vào Bluestacks theo một trong các cách sau:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhấp đúp vào file APK, cách này đơn giản và nhanh nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuột phải vào file APK, chọn "Open With", sau đó chọn Bluestacks.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kéo thả file APK vào màn hình ứng dụng Bluestacks</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quá trình cài đặt LandStar 7 sẽ diễn ra nhanh chóng. Ngay sau khi quá trình cài đặt kết thúc, bạn sẽ thấy biểu tượng icon của LandStar 7 trên màn hình trang chủ của Bluestacks. Nhấp chuột vào biểu tượng icon này để bắt đầu sử dụng LandStar 7 trên máy tính PC Windows.</span></span><br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> ', 'images' => '2021080616092739e989a091af097f2762083a8ccfb10e.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23109', 'slug' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '225', 'rght' => '226', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '640', 'name' => 'iRTK4 Hi-Target - A Simple but not Simplistic GNSS System', 'code' => null, 'alias' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">iRTK4 Hi-Target là hệ thống thu GNSS thông minh đầy đủ tính năng được trang bị anten mới tích hợp đa kênh tiên tiến cho phép người dùng giải được các bài toán đo đạc một cách chính xác, đáng tin cậy. Tính năng Tilt-Surveying không cần hiệu chuẩn mà vẫn có thể thu thập dữ liệu ở nhiều nơi.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. RTK tiên tiến thế hệ mới<br /> <br /> Quản lý tín hiệu vệ tinh linh hoạt giúp bạn có được giải pháp chính xác hơn. Hiệu suất được cải thiện 20% trong môi trường GNSS đầy thử thách.<br /> <br /> 2.IMU (Biểu tượng)<br /> <br /> Bắt đầu ngay lập tức với công nghệ bù nghiêng không cần hiệu chuẩn, hỗ trợ bạn khảo sát nhanh chóng và chính xác hoặc xác định các điểm mà không cần cân bằng cột, Sai số dưới 3cm trong phạm vi nghiêng 45 °, tăng hiệu suất làm việc lên 20%.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/iRTK4(1).jpg" style="width: 383px; height: 131px;" /><br /> <br /> 3. Sạc nhanh<br /> <br /> Sạc pin của bạn lên đến 50 phần trăm chỉ trong 50 phút với bộ chuyển đổi 45W, nhờ khả năng sạc nhanh, bạn có thể sạc lại trong thời gian ngắn hơn.<br /> <br /> 4. Giao diện người dùng web (WEB UI)<br /> <br /> Cách nhanh chóng và hiệu quả để giám sát và điều khiển các thiết bị phần cứng. Ngoài ra, cung cấp quyền truy cập vào các tính năng được sử dụng phổ biến nhất thông qua trình duyệt web hiện có trên thiết bị bạn chọn — không cần tải xuống hoặc cài đặt bất kỳ thứ gì!<br /> <br /> 5. Smart Base<br /> <br /> Tối ưu hóa tuyệt vời cài đặt chế độ làm việc, Tự động ghép nối Base và Rover của bạn bằng dịch vụ toàn cầu Hi-target, mở rộng phạm vi công việc và tiết kiệm thời gian của bạn.<br /> <br /> Radio ngoài thế hệ mới<br /> <br /> HDL-460A cung cấp thông tin liên lạc dữ liệu đáng tin cậy cho các ứng dụng quan trọng trong đó yêu cầu sự kết hợp của sự ổn định, hiệu suất cao và phạm vi xa.<br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> </span></span>', 'images' => '20210805113424adf751172d9f3d7ddcf7e526d09e3fb6.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-05', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23795', 'slug' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '223', 'rght' => '224', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '639', 'name' => 'Thông số kỹ thuật của một số dòng máy toàn đạc điện tử Leica (cũ): TCR-403, TCR-405, TCR-407, TCR-705, TCR-802, TCR-805', 'code' => null, 'alias' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><font color="#323232">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ: </font><span style="line-height: 107%; letter-spacing: 0.1pt;">Leica TCR-802 Power, Leica TCR-805, Leica TC-705.</span></span></span> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> </h1> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="font-size: 17pt; line-height: 107%; font-family: Helvetica, sans-serif; letter-spacing: 0.1pt;"><o:p></o:p></span></h1> ', 'content' => '<p> <font color="#323232" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ:<br /> <br /> - </font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; line-height: 14.98px; letter-spacing: 0.1pt;">Leica TCR-802 Power<br /> - Leica TCR-805<br /> - Leica TC-705</span><br /> - <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica TCR 403, 405,407 Power</span></span><br /> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">I. Máy toàn đạc điện tử Leica TCR-802 Power</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 2”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/154253643_1379364745733010_5284105879190099443_o (1)(1).jpg" style="width: 480px; height: 360px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Máy toàn đạc điện tử Leica TCR-805</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 5”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/abaec5a286b071ee28a19.jpg" style="width: 480px; height: 640px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">III. Máy toàn đạc điện tử Leica TC-705</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Đo góc<br /> - Có độ chính xác là: ±5”<br /> - Cách đo: liên tục, đối tâm và tuyệt đối.<br /> 2. Hệ thống bù trục<br /> - 4 trục bù nghiêng<br /> - Dải bù nghiêng là : 4’<br /> - Có độ chính xác bù trục là: ±0.5”<br /> 3. Đo cạnh có gương<br /> - Khi đo bằng gương GPR1 là: 1.000m<br /> - Khi đo bằng gương GRZ4 là: 600m<br /> - Khi đo bằng gương mini GMP 101 là: 400m<br /> - Đối với gương giấy 60 x 60mm là: 250m<br /> - Có độ chính xác là: ±1mm + 1.5 ppm / 2.4 giây<br /> - Khi đo nhanh là: ±3 mm+1.5 ppm / 0.8s<br /> - Hiển thị là: 0.1 mm<br /> - Cách thức: Đổi pha với tia laze đỏ đồng trục, rõ rệt.<br /> 4. Đo cạnh không gương<br /> - PinPoint R200 là : 200m<br /> - Có độ chính xác là: ±2mm + 2 ppm / 3 giây<br /> 5. Ống kính<br /> - Có độ phóng đại ống kính là: 30 X<br /> - Độ mở ống kính là : 40mm<br /> - Dải điều quang: từ 1.7 m cho tới vô cùng<br /> 6. Dọi tâm<br /> - Kiểu dọi tâm: bằng tia laze<br /> - Có độ chính xác là: ±1mm tại 1.5 chiều cao máy<br /> 7. Màn hình, bàn phím<br /> - Được trang bị 01 Màn hình LCD rõ nét<br /> - Bàn phím gồm có chữ và số. Có chiếu sáng cho màn hình<br /> 8. Quản lý dữ liệu<br /> - Có bộ nhớ trong là: 10.000 điểm nhập cùng với điểm đo được<br /> - Truyền dữ liệu: GSI-Format via RS232<br /> - Trao đổi dữ liệu: GS116 / IDEX / GS18 / dxf<br /> 9. Pin của máy<br /> - Sử dụng Pin Lithium-Ion GEB 121,<br /> - Thời gian vận hành: từ 5 đến 8 tiếng<br /> 10. Trọng lượng<br /> - Đầu máy nặng: 5,6 kg<br /> 11. Khả năng chống nước và chống bụi<br /> - Đã đạt được tiêu chuẩn IP54<br /> - Có khả năng chịu độ ẩm lên đến 95%</span></span><br /> <br /> <h2> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IV. Máy toàn đạc điện tử Leica TCR-403; TCR-405; TCR-407</span></span></h2> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Dòng sản phẩm LEICA Total Station TPS400 Power (TCR403/405/407 Power) nổi bật với chế độ đo không gương (bằng tia laser) và laser chỉ hướng.</span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Thừa hưởng đầy đủ các tính năng của TPS400, TPS400 Power còn được tích hợp thêm khả năng đo xa bằng tia laser không cần gương, chỉ cần ngắm vào vật có độ phản xạ đủ cao (90%). Điều này đã giúp cho TPS400 Power năng động và tiện lợi hơn.</span><br /> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">1. Ống kính:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ phóng đại: 30 x<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trường nhìn : 1° 30’(1.66 gon) 26m tại khoảng cách 1km<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phạm vi điều tiêu: 1.7 m đến vô cùng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thể lưới: chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 2. Bộ nhớ, truyền dữ liệu:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ nhớ trong: 24.000 điểm ghi<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Định dạng dữ liệu: GSI / DXF / XML / ASCII/XLS/ Định dạng tự do<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 3. Bàn phím và màn hình<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Màn hình: 01 màn hình tinh thể lỏng LCD <a href="http://tracdiathanhdat.vn/gioi-thieu-cong-ty-cp-cn-va-tm-thanh-dat.htm" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;">160×280</a> pixel, đèn chiếu sang 5 cấp<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bàn phím tiêu chuẩn Alpha<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 4. Đo góc ( Hz, V)<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác (ISO 171233): 5”<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Hiển thị: 1” / 0.1 mgon / 0.01 mil<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phương pháp: tuyệt đối, liên tục, đối tâm<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ bù: tăng lên bốn lần sự bù trục<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác thiết đặt độ bù: 2”</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">5. Đo khoảng cách tới điểm phản xạ:</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Đo không gương (đo Laser RL): 170 m </span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Gương GPR1: 3500m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Tấm phản xạ (60mmx60mm): 250m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác/ Thời gian đo:<br style="margin: 0px; padding: 0px;" /> + Đo chính xác (Fine) : ±(5 mm+2 ppmD)/ 2.4 giây,<br style="margin: 0px; padding: 0px;" /> + Đo nhanh: ±(5mm+2ppmD)/0.8 giây,<br style="margin: 0px; padding: 0px;" /> + Đo đuổi: ±(5mm+2ppmD)/< 0.15 s<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 6. Hệ điều hành: Windows CE: 5.0 Core<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 7. Dọi tâm laser:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại : Điểm laser,chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác dọi tâm:1.5mm trên 1.5m chiều cao máy<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 8. Nguồn pin (GEB221):<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại: LithiumIon<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thời gian làm việc: hơn 20 h<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trọng lượng: 5.1 kg<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 9. Môi trường hoạt động:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Biên độ làm việc: từ -20°C tới +50°C<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Chịu nước và bụi (IEC 60529): IP55<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ ẩm: 95% không ngưng tụ</span></span><br /> </p> <table border="1" cellpadding="0" cellspacing="0" style="width:619px;" width="619"> <tbody> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu kỹ thuật </strong></span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>403</strong></span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>405</strong></span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>407</strong></span></span></td> </tr> <tr> <td colspan="3" style="width:499px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Độ góc (Hz, V)</strong></span></span></td> <td style="width:120px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương thức</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo liện tục tuyệt đối</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gốc hiển thị (bước nhảy)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″ / 0.1 mgon / 0.01 mil</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -3)</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3″ (1 mgon)</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5″ (1.5 mgon)</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7″ (2 mgon)</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Ống kính</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ số phóng đại</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">30x</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trưng nhìn</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1° 30′ (26 m at 1 km)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khỏang cách nhìn gần I</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưới chữ thập</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiếu sáng</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Bù nghiêng</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống bù nghiêng</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng 2 trục</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Setting accuracy</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5″</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2″</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Đo khoảng cách bằng tia hồng ngoại</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring range with circular prism GPR1</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring with reflective foil<br /> (60 mm x 60 mm)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">250m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -4)<br /> (fine/quick/tracking)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2mm + 2 ppm/5 mm + 2 ppm/5 mm + 2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">< 1 sec/< 0.5 sec/< 0.15 sec</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chính xác, nhanh, do liên tục.</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo khoảng cách không gương</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R100 (“power”) 170m (90 % reflective)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(Medium atmospheric conditions)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R300 (“ultra”) > 500 m (90 % reflective)<br /> Laser at GPR circular reflector 7’500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3mm+2 ppm/5 mm+2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">typ. 3 s/1 s</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kíck cỡ điểm với 100 m</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">12mm x 40 mm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu</strong></span></span></td> <td colspan="3" style="width:354px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ trong</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 Điểm đo</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao tiếp</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RS232</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng dữ liệu</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GSI/ASCII/dxf/Freely definable formats</span></span></td> </tr> </tbody> </table> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"> </span></span></span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="width: 250px; height: 100px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '202107301638040599a20d3fb57fe46b312b506c17e5cc.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử ', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-30', 'modified' => '2026-07-12', 'status' => '1', 'view' => '19533', 'slug' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '221', 'rght' => '222', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '638', 'name' => 'Những lỗi thường gặp ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m', 'code' => null, 'alias' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span>', 'content' => '<br /> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tham khảo một số lỗi và ý nghĩa của những lỗi này ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m</span></span><br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1565334829-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-dathop-02.jpg" style="width: 620px; height: 477px;" /><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp các lỗi trên hãy liên hệ với chúng tôi qua số hotline để được khắc phục nhé!<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/hotline(1).png" style="width: 250px; height: 100px;" /></span></span><br /> ', 'images' => '2021072917090604e0ee7f57cb99fce8677b2f946c35af.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình điện tử', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-29', 'modified' => '2026-07-12', 'status' => '1', 'view' => '14983', 'slug' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '219', 'rght' => '220', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '637', 'name' => 'So sánh giữa Garmin GPSMAP 66S vs GPSMAP 64S', 'code' => null, 'alias' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tham khảo sự khác nhau giữa hai dòng máy định vị GPSMAP 66s và 64s của hãng Garmin và những ưu điểm vượt trội mà Garmin đã mang tới cho dòng máy GPSMAP 66s nhé.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>GPSMAP 66s</strong>: Thiết bị cầm tay đa vệ tinh tích hợp cảm biến.</span></span><br /> <br /> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">GPSMAP 64s</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">: </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);">Độ nhạy máy thu cao, thiết bị có thể cùng lúc nhận được tín hiệu vệ tinh từ hai hệ thống GPS và GLONASS. GPSMAP 64s</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);"> kèm theo khí áp kế để đo cao độ, la bàn điện tử, kết nối USB tốc độ cao, hỗ trợ khe cắm thẻ nhớ, đồng thời có khả chia sẽ dữ liệu bằng Wireless với các thiết bị Garmin tương thích khác.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/So sánh GPS 66 và 64.jpg" style="width: 690px; height: 459px;" /><br /> <br /> <br /> <u><strong>>>> Cùng so sánh thông số kỹ thuật của hai dòng máy GPSMAP 66s và 64s:</strong></u></span></span><br /> <br /> <br /> <table border="1" cellpadding="0" cellspacing="0"> <tbody> <tr> <td style="width:161px;"> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 66s</strong></span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 64s</strong></span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước tổng thể:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.2 x 16.3 x 3.5cm</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.1 x 16 x 3.6cm</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3 inches</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.6 inches</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ phân giải màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">240 x 400p (pixel)</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">160 x 240p (pixel)</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ khả năng:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">16GB</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4GB</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Waypoint/Routes/ Tracklog:</span></span></td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">20000 Điểm, 250 GPX Track và 300 điểm được lưu</span></span></td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 điểm, 200 điểm được lưu</span></span></td> </tr> </tbody> </table> <br /> <ul> <li> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Theo dõi hoạt động thời tiết </span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tải xuống hình ảnh vệ tinh trực tiếp (không đăng ký)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chắc chắn theo tiêu chuẩn MIL-STD 810G cho hiệu suất nhiệt, sốc và nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhật ký Rinex</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối WiFi / Bluetooth</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Thiết kế phần cứng</strong><br /> Từ góc độ thiết kế, cả hai thiết bị đều cực kỳ giống nhau, với một vài khác biệt nhỏ về kích thước và màn hình<strong>. </strong>GPSMAP 66S có kích thước tổng thể lớn hơn một chút, nhưng sự khác biệt là gần như không thể nhận ra. Ngoài những thay đổi trực quan rõ ràng, họ cảm thấy khá giống với mẫu cũ. Những thay đổi khác là các nút nhỏ gọn hơn một chút nhưng rộng hơn. Các chức năng của nút giống nhau mặc dù phiên bản GPSMAP 66s có menu khác.<br /> <br /> Nút nguồn được đặt ở phía trên của thiết bị. Vị trí trên GPSMAP 64 có vẻ được ưu thích hơn vì bật / tắt dễ dàng nhưng bạn có thể hiểu lý do tại sao Garmin muốn thực hiện thay đổi này vì nó ít có khả năng bị hỏng khi bật thiết bị và lãng phí điện năng của bạn.<br /> <br /> Khác với những thay đổi đó và màn hình lớn hơn một chút, tất cả các cổng đều giống nhau, mặc dù Garmin đã thay đổi dây nguồn / dữ liệu thành MicroUSB. Khe cắm thẻ Micro SD có thể bên dưới pin.<br /> <br /> <strong>Tuổi thọ pin</strong><br /> Cả hai thiết bị đều hoạt động trên hai pin AA và tuổi thọ thông thường sẽ là 16 giờ mặc dù điều đó chủ yếu phụ thuộc vào chức năng ứng dụng và sử dụng GPS của bạn. GPSMAP 66 mới cũng có chức năng "<strong>Expedition"</strong> , giúp tăng đáng kể thời lượng pin của thiết bị bằng cách hạn chế các chức năng phần mềm tự động như điểm theo dõi, thời gian hiển thị và vào chế độ năng lượng thấp.<br /> <br /> <strong>Cách bật chế độ Expedition trên GPSMAP 66s</strong><br /> <br /> Chuyển đến menu chính của thiết bị> Chọn <strong>Cài đặt</strong> > Chọn "<strong>Expedition"</strong> . Sau đó, bạn sẽ được yêu cầu chọn "<em>Tự động, Nhắc hoặc Không bao giờ</em>".<br /> Chọn <em>Tự động</em> sẽ tự động đặt thiết bị sang chế độ thám hiểm sau hai phút hoạt động.<br /> Chọn <em>Nhắc </em>có nghĩa là lần sau khi bạn tắt thiết bị, nó sẽ yêu cầu bạn bật chế độ thám hiểm thay vì tắt.<br /> Chọn <em>Không bao giờ</em> sẽ tắt bất kỳ hình thức chế độ thám hiểm nào bạn đã chạy (Nhắc hoặc Tự động).<br /> <br /> <strong>Các tính năng phần mềm khả dụng trên cả hai thiết bị</strong><br /> Cả hai thiết bị đều có thể ghi lại các điểm / tuyến đường và nhật ký theo dõi, mặc dù GPSMAP 66s có thể ghi lại nhiều hơn.<br /> <br /> Một số tính năng của cả hai dòng máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính diện tích trên các thiết bị (chỉ cần đi bộ chu vi của khu vực).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tải bản đồ tùy chỉnh - bạn có thể tải bản đồ tùy chỉnh tương thích với các thiết bị của Garmin (Garmin Topo hoặc thậm chí City Nav Maps). Nếu bạn tải một trong hai bản đồ này, thì bạn sẽ có quyền truy cập vào chức năng định tuyến tự động trên thiết bị. * Bạn cần sử dụng bản đồ Topo bản FULL để định tuyến.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Geocaching thân thiện - ứng dụng Geocaching được tải sẵn trên các thiết bị, mặc dù vậy bạn cần phải đăng ký thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lịch săn / cá - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin Mặt trời và Mặt trăng - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng xem ảnh </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Kết nối GARMIN</strong><br /> <br /> Garmin Connect - khả dụng trên cả hai thiết bị cho phép thông tin hoạt động được gửi đến tài khoản kết nối Garmin của bạn và cho phép các tính năng được kết nối với điện thoại thông minh của bạn. Các tính năng được kết nối bao gồm Thông báo điện thoại, LiveTrack, GroupTrack.<br /> <br /> <strong>Chức năng cảm biến</strong><br /> Cả hai thiết bị GPS cầm tay trên đều có thể đo độ cao áp kế, la bàn bù 3 trục nghiêng. Việc đo độ cao áp kế sẽ có thể cung cấp cho bạn thông tin về những thay đổi của điều kiện thời tiết (giả sử bạn vẫn ở cùng độ cao) mặc dù nó cần phải được hiệu chỉnh đầy đủ. Cảm biến này cũng có thể được sử dụng để đo lường thay đổi độ cao của bạn và thậm chí đo lường thay đổi độ dốc AVG khi nhìn vào dữ liệu điểm của bạn.<br /> <br /> <strong>>>> Các tính năng phần mềm CHỈ khả dụng trên GPSMAP 66s:</strong><br /> <br /> - Tương thích với ứng dụng khám phá của Garmin - Sau khi được kết nối với ứng dụng điện thoại thông minh của bạn, ứng dụng khám phá của Garmin sẽ tự động đồng bộ hóa và chia sẻ điểm tham chiếu, tuyến đường và tuyến đường với thiết bị của bạn. Bạn cũng có thể tải bản đồ về điện thoại thông minh của mình để truy cập ngoại tuyến.<br /> <br /> - Theo dõi hoạt động thời tiết <br /> Garmin đã tăng thông tin thời tiết của họ một cách đáng kể với lần lặp này. Bây giờ bạn có thể nhận được rất nhiều dữ liệu thời tiết dựa trên thông tin dự báo thời gian thực. Họ có các tùy chọn bản đồ dự đoán riêng biệt về nhiệt độ, gió, mưa và mây. Nó cũng cung cấp radar thời tiết trực tiếp để bạn sẵn sàng thay đổi kế hoạch nếu bạn sắp bị bắt. Tính năng này không phụ thuộc vào kết nối Bluetooth hoạt động với điện thoại thông minh của bạn có bộ phận tiếp nhận. <br /> Hình ảnh vệ tinh hoạt động chính xác giống như trên loạt GPSMAP 64s nhưng bạn không còn phải trả tiền cho nó nữa.<br /> <br /> - Điểm mới của dòng GPSMAP 66s là khả năng tương thích với cửa hàng Connect Connect của Garmin, về cơ bản là 'App Store' của Garmin. <br /> <br /> - Chức năng InReach Remote: bạn có thể điều khiển thiết bị inReach mini của mình.<br /> <br /> - Đèn pin và SOS <br /> Một tính năng độc đáo khác là <strong>đèn pin LED</strong> rất sáng và<strong> đèn hiệu SOS</strong> có thể được sử dụng để báo hiệu sự giúp đỡ. Chức năng SOS chỉ là một nét khẩn cấp. Tuy nhiên, bạn cũng có thể đặt đèn pin nhấp nháy trong khoảng 1-9 lần mỗi giây.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp.jpg" style="width: 250px; height: 100px;" /><br /> <br /> </span></span>', 'images' => '202408021508551192007d993f13fc9de7ce32bd9bab16.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy định vị GPS cầm tay Garmin', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-28', 'modified' => '2026-07-12', 'status' => '1', 'view' => '27644', 'slug' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '217', 'rght' => '218', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '636', 'name' => 'Máy thuỷ bình kỹ thuật số Leica LS10 và LS15', 'code' => null, 'alias' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span></span>', 'content' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10, LS15 có thể làm việc liên tục nhiều giờ, độ sai lệch gần như tuyệt đối không ảnh hưởng tới độ chính xác kết quả đo.<br /> <br /> Leica LS10, LS15 thường được dùng để đo chênh cao, đo khoảng cách với yêu cầu độ chính xác cao tuyệt đối. Máy có thể dẫn cao độ phục vụ cho vẽ thành lập bản đồ.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> Tính linh hoạt </span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dòng máy thủy bình Leica LS10, LS15 được thiết kế để khảo sát, thực hiện san lấp mặt bằng thường xuyên trên các công trường xây dựng, kiểm tra hoặc giám sát các tòa nhà, đường sắt hoặc đường bộ. Với Leica LS10, LS15 bạn luôn có sẵn công cụ làm việc phù hợp.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác và độ tin cậy cao nhất</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bạn sẽ nhận được kết quả đáng tin cậy và chính xác ngay. Chất lượng quang học hàng đầu của Leica Geystems luôn mang lại hình ảnh có độ tương phản cao và giúp việc đọc chính xác và dễ dàng ngay cả trong điều kiện ánh sáng không thuận lợi. Do sự ổn định nhiệt độ cao, Leica LS10, LS15 luôn mang lại kết quả đáng tin cậy không ảnh hưởng bởi bức xạ mặt trời trực tiếp.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chăm sóc khách hàng chỉ với một cú nhấp chuột.</strong> </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông qua <a href="https://leica-geosystems.com/services-and-support/customer-support-services/active-customer-care">ACTIVE CUSTOMER CARE</a> - một mạng lưới toàn cầu gồm các chuyên gia giàu kinh nghiệm bạn sẽ được hướng dẫn một cách thành thạo mọi vấn đề:<br /> - Loại bỏ sự chậm trễ với dịch vụ kỹ thuật cao cấp<br /> - Hoàn thành công việc nhanh hơn với hỗ trợ tư vấn tuyệt vời<br /> - Tránh các lần truy cập trang web tốn kém với dịch vụ trực tuyến để gửi và nhận dữ liệu trực tiếp từ hiện trườn</span></span>g.<br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cài đặt nhanh chóng và thuận tiện</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả và giảm thời gian làm việc với Leica LS10, LS15. Sử dụng núm lấy nét để cài đặt nhanh chóng. Chuyển động tốt mang lại một hình ảnh hoàn hảo. LS10 & LS15 cung cấp cho bạn một mức độ bảo mật cao!</span></span><br /> <br /> <br /> <iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="394" src="https://www.youtube.com/embed/lBe6-DiokBQ" title="YouTube video player" width="700"></iframe>', 'images' => '20221227151040ffcdeffa3829f4a633ea0b404e2b4a0a.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình Leica', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '26500', 'slug' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '215', 'rght' => '216', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '635', 'name' => 'Ống nhòm và những lưu ý khi mua ống nhòm', 'code' => null, 'alias' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tìm hiểu về ống nhòm và tham khảo một số lưu ý khi chọn ống nhòm!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Ống nhòm là gì?</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm, còn gọi là ống ngắm hay con mắt xa, là một hệ hai kính viễn vọng quang học được gắn cạnh nhau và cùng hướng, cho phép người quan sát đặt cả hai mắt để quan sát các vật ở xa. Cấu tạo gồm vật kính, thị kính và thường có thêm hệ thống lăng kính. Vật kính bao gồm một thấu kính hội tụ, thị kính là thấu kính hội tụ có tiêu cự nhỏ nhất nhưng sẽ làm hình ảnh bị ngược nên cần thêm lăng kính đảo ảnh.<br /> <br /> * Cấu tạo ống nhòm gồm một hệ thống hai thấu kính hội tụ đặt đồng trục.</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vật kính L1: tiêu cự f1 rất dài (vài m)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thị kính L2: tiêu cự f2 ngắn (vài cm) và được sử dụng như kính lúp</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách giữa thị kính và vật kính thay đổi được.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Cấu tạo ống nhòm.png" style="width: 300px; height: 383px;" /><br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Tìm hiểu về các thông số về ống nhòm</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thường ta hay nhìn thấy ký hiệu 7×50, 8×40, 10×42, 15×70, 25×100… ở trên các ống nhòm. Hai chữ số này nói lên điều gì?<br /> <br /> <u>Ví dụ</u>: <span style="color:#000000;"><span style="text-align: justify;">Ống nhòm Nikon MONARCH 7 10x42</span></span><br /> <br /> <strong>10</strong> - số đằng trước dấu nhân (x) sẽ là độ phóng đại của ống nhòm đó (tức là 10 lần).<br /> <strong>42</strong> - số đằng sau dấu nhân sẽ là đường kính của vật kính ống nhòm theo đơn vị millimet ( tức là 42mm).<br /> <br /> Thông số độ phóng đại có nghĩa là bạn sẽ nhìn vật đó gần lại bạn 10 lần theo tỉ lệ xấp xỉ 1/10. Có nghĩa là bạn nhìn một vật xa 1km bằng ống nhòm, thì khi đó như bằng mắt thường bạn nhìn 100m.<br /> <br /> Nhiều bạn hay thắc mắc một câu hỏi khi mua ống nhòm: <strong>ống nhòm này nhìn bao xa?</strong> Thực chất cái xa vô cùng mà mình nói ở đây nó là một vật đủ lớn mà khi nhìn qua ống nhòm chúng ta có thể thấy nó và nhìn được hình dạng của nó. Điều quan trọng mà các bạn hay bỏ quên đó là ”chất lượng ảnh như thế nào?” thì rất ít bạn quan tâm. Đây là điều quan trọng để đánh giá một chiếc ống nhòm tốt hay không?</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường kính vật kính là thông số được tính bằng đơn vị mm. Nếu vật kính càng lớn thì khả năng thu sáng và chất lượng ảnh của bạn sẽ càng tốt và ngược lại. Tuy nhiên nếu mà lớn quá thì một trong những nhược điểm đó là ảnh quan sát thu được sẽ bị sai sắc (là điều không thể tránh khỏi). Bởi vậy khi lựa chọn mua ống nhòm thì các bạn nên chọn sao cho phù hợp với độ phóng đại ống nhòm mà mình mong muốn. Ví dụ 7×50, 8×40, 10×42, 10×50, 12×60, 15×70…</span></span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Xuất xứ tất cả các loại ống nhòm hiện nay</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm hiện nay có ba nguồn gốc xuất xứ chính, đó là tự lực sản xuất sản phẩm, OEM và ODM. Vậy những khái niệm này là gì?</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Những sản phẩm đến từ các thương hiệu tự lực sản xuất có nghĩa là ống nhòm của thương hiệu này được thiết kế và gia công bởi chính một đơn vị. Tuy nhiên hiện nay có khá ít thương hiệu có thể tự lực sản xuất được mà không nhờ bên thứ ba. Đối với những sản phẩm được tự lực sản xuất này thì sẽ mang đậm dấu ấn của thương hiệu và không bị ảnh hưởng bởi các yếu tố kỹ thuật từ các bên. Tuy nhiên những chiếc ống nhòm được tự lực sản xuất có giá thành khá cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm <strong>OEM</strong> là những chiếc ống nhòm được công ty chủ chủ quản thiết kế nhưng lại không trực tiếp gia công, mà phải nhờ đến một bên thứ 3. Đơn vị gia công sẽ hoàn thiện sản phẩm dựa trên bản thiết kế và chịu sự kiểm soát chất lượng từ đơn vị chủ quản thiết kế. Với hình thức này thì sản phẩm thường có giá thành rẻ hơn nhưng về dấu ấn thương hiệu của sản phẩm thì không nổi bật nhiều.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Và hình thức cuối cùng là sản phẩm <strong>ODM</strong>, những sản phẩm ống nhòm thường đến từ các thương hiệu có khả năng kinh doanh nhưng không có khả năng thiết kế hay gia công sản phẩm. Ống nhòm của những thương hiệu này sẽ được đặt thiết kế và gia công ở một đơn vị nào đó và in thương hiệu của mình lên.</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc xác định được nguồn gốc của sản phẩm cũng là cách chọn mua ống nhòm mà bạn nên lưu tâm. Mỗi thương hiệu đều có một ưu nhược điểm riêng, tùy vào nhu cầu bạn có thể lựa phương thức sản xuất phù hợp.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Phân loại các loại ống nhòm hiện nay theo chức năng</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường có rất nhiều loại ống nhòm khác nhau, dưới đây là một số loại ống nhòm phố biến được nhiều người lựa chọn nhất.<br /> - <strong>Ống nhòm mini</strong> là loại ống nhòm có kích thước gọn nhẹ đến bất ngờ, tuy nhiên tầm nhìn thì hơi hạn chế. Loại ống nhòm này có kích thước rất nhỏ nên có thể bỏ trong balo, túi xách để mang theo bên người, trong các chuyên tham quan, thám hiểm, du lịch.<br /> - <strong>Ống nhòm ban đêm</strong> là loại ống nhòm có khả năng nhìn xuyên bóng tối nhờ được trang bị đèn hồng ngoại. Hình ảnh nhìn được trong bóng tối qua ống nhòm hồng ngoại thường không màu. Ngoài ra, loại ống nhòm hồng ngoài ngày còn được tích hợp tích năng ghi hình, chụp ảnh.<br /> - <strong>Ống nhòm chụp ảnh</strong> là loại ống nhòm được tích hợp thêm chức năng bắt lại những khoảnh khắc đẹp khi chúng ta quan sát. Tuy nhiên, vì không phải là thiết bị chuyên về chụp ảnh nên hình ảnh chụp được có chất lượng còn hạn chế.<br /> - <strong>Ống nhòm đo khoảng cách</strong> là loại ống nhòm ngoài việc quan sát một đối tượng thì còn đo được khoảng cách từ chỗ chúng ta đứng đến vật thể. Ngoài ra, loại ống nhòm này còn được tích hợp tính năng đo góc, đo chiều cao<br /> - <strong>Ống nhòm nhiệt</strong> loại ống nhòm hiện đại có khả năng hiển thị thân nhiệt của đối tượng bạn đang quan sát, cũng như phân biệt được đối tượng với môi trường xung quanh nhờ sự chênh lệch nhiệt độ.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Một số lưu ý khi chọn ống nhòm phù hợp với nhu cầu</strong></span></span></h2> <p> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.1 Kích thước ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ống nhòm có kích thước lớn Full-Size (8x42, 10x50)<br /> Các dòng ống nhòm có kích thước lớn thường thu nhận ánh sáng tốt hơn, có thể xem và quan sát trong điều kiện ánh sáng yếu như lúc bình minh hay hoàng hôn. Các ống nhòm này sẽ cung cấp cho bạn cái nhìn rộng lớn về quang cảnh phía trước, thích hợp cho ngắm chim, động vật hoang dã,... nhưng ngược lại kích thước của chúng lại lớn và thường rất nặng.<br /> <br /> - Ống nhòm có kích thước trung bình Mid-Size (7x40, 16x32, 10x42)<br /> Các dòng ống nhòm có kích thước trung bình thường được sử dụng cho ngắm cảnh thiên nhiên, cho các hoạt động du lịch dã ngoại hoặc sử dụng để quan sát các buổi biểu diễn, xem các trận bóng đá,... Ống nhòm này có kích thước vừa phải, khả năng quan sát tốt, trọng lượng phù hợp với mọi người. Tuy nhiên mức độ truyền dẫn ánh sáng lại không được bằng ống nhòm có kích thước lớn.<br /> <br /> - Ống nhòm có kích thước nhỏ gọn - ống nhòm mini (6x18, 8x21)<br /> Các loại ống nhòm này thường thích hợp để sử dụng cho các hoạt động ban ngày. Đây là loại ống nhòm có kích thước nhỏ gọn, cầm vừa tay, thoải mái khi sử dụng trong thời gian dài.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/genmedia_PIC1739447_RL_02_w1500_h1500_c217224230255(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.2 Độ phóng đại của ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi ống nhòm thường được xác định bởi hai cặp số. Số đầu tiên chỉ độ phóng đại của ống nhòm và số thứ 2 thể hiện đường kính vật kính của ống nhòm. Ở đây ta thấy đối với ống nhòm có độ phóng đại lớn hình ảnh quan sát được sẽ càng gần hơn. Tuy nhiên, nếu bạn chọn ống nhòm có độ phóng đại quá lớn, ống nhòm siêu zoom thì kích thước lớn sẽ làm tăng độ rung khi tay bạn cầm không chắc dẫn đến hiện tượng mỏi mắt.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.3 Đường kính ống kính mục tiêu rộng</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giống như độ phóng đại, thông số thứ 2 của ống nhòm là về đường kính ống kính vật kính. Đường kính ống kính càng rộng cho phép tiếp nhận càng nhiều ánh sáng hơn. Khi nhiều ánh sáng bạn sẽ quan sát thấy hình ảnh tươi sáng hơn đặc biệt là trong điều kiện ánh sáng yếu như hoàng hôn hay lúc bình minh.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ong-nhom-hong-ngoai-2-mat-co-ghi-hinh-4x50mm-equinox-z_2253.png" style="width: 420px; height: 329px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.4 Thoát sinh học - Exit Pupil</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ thoát sinh học cho biết ảnh, độ sáng của vật thể khi đang quan sát. Nếu thông số này lớn sẽ làm cho hình ảnh quan sát được rõ nét hơn, tươi sáng hơn. Cách tính toán thông số này bằng cách lấy đường kính phóng đại chia cho độ phóng đại của ống kính. Nếu thông số này nằm ở ngưỡng 7 thì đó là ống kính tốt có thể lựa chọn để quan sát các vật trong ánh trời sáng trăng, lúc ánh sáng yếu, ở ngưỡng 5mm hoặc cao hơn sẽ thích hợp cho quan sát ban ngày hoặc ánh sáng yếu.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.5 Khoảng cách đặt mắt - Relief Eye</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Relief Eye là khoảng cách đặt mắt giữa thị kính tới mắt của bạn sao cho khả năng quan sát tốt nhất thoải mái nhất. Khoảng đặt mắt càng lớn bạn lại càng phải đưa ống nhòm ra xa hơn so với mắt mình, nhưng lại tốt đối với những người đeo kính (đối với những người đeo kính nên chọn thông số này là 11mm hoặc cao hơn).<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.6 Trường nhìn</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trường nhìn là thông số cho phép bạn biết độ rộng khu vực mình muốn quan sát tại khoảng cách 1000m từ nơi bạn đang đứng. Trường nhìn rộng để quan sát thiên nhiên, quan sát động vật, trường nhìn hẹp giúp quan sát các đối tượng ít di chuyển.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/nikon-coolshot-40-i-4(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.7 Hệ thống lấy nét</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm thường được trang bị hệ thống lấy nét ở trung tâm cho cả hai mắt, hoặc điều chỉnh diop trên cả hai mắt. Việc điều chỉnh diop trên hai mắt giúp bù đắp những hạn chế về thị lực giữa hai mắt của bạn.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.8 Lớp phủ thấu kính</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm giá rẻ thường không được tráng phủ nhiều lớp ra vậy cảm giác nhìn qua ống nhòm này thường mờ và không rõ nét. Lớp phủ thấu kính giúp giảm sự phản xạ ánh sáng và tăng khả năng truyền dẫn ánh sáng.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.9 Khả năng chống nước và kháng thời tiết</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng chống nước trên ống nhòm có thể là khả năng chịu nước, khả năng chống thấm, khi sử dụng ở điều kiện thời tiết thay đổi, nhiệt độ thay đổi.<br /> Các loại ống nhòm du lịch thường được trang bị khả năng chống nước mưa, ống nhòm quân sự, ống nhòm hải quân có thể được trang bị thêm khả năng chịu được áp lực nước hoặc nổi trên mặt nước.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.10 Khả năng chống đọng sương</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm giá rẻ thường bị mờ sương khi di chuyển qua lại giữa các vùng có nhiệt độ khác nhau. Mờ sương gây nhiều phiền toái cho bạn, thậm chí có thể làm hỏng ống nhòm nếu không loại bỏ độ ẩm đó ra khỏi ống nhòm.<br /> Hiện nay, các ống nhòm chuyên dụng, ống nhòm cao cấp đã được bơm các loại khí trơ, khí nitor bên trong ống nhòm để tránh gây hiện tượng ngưng tụ hơi nước. Điều này giúp bảo vệ ống nhòm của bạn tránh đọng sương lên bền mặt ống kính.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Địa chỉ mua ống nhòm/ ống nhòm đo khoảng cách uy tín</span></span></h2> <p id="2-dia-chi-mua-thiet-bi-may-bay-khong-nguoi-lai-uav-uy-tin" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại ống nhòm/ ống nhòm đo khoảng cách của các hãng Leica, Nikon, Barska, Garmin, Terrinox, Steiner, SNDWAY, ... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="color: rgb(51, 51, 51); text-align: justify;"> </span><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"> </span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span><br /> ', 'images' => '20210714155415df03af942339bf722676fd2f752f2a1f.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'ống nhòm đo khoảng cách', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-14', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24581', 'slug' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '213', 'rght' => '214', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '634', 'name' => 'Phụ kiện trắc địa', 'code' => null, 'alias' => 'phu-kien-trac-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Phụ kiện trắc địa là gì?</span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hầu hết những phụ kiện trắc địa đều thiết kế có thể tách rời với máy, phòng trong những trường hợp bị hư hỏng, chỉ phải thay thế phụ kiện mới. Điều này khiến cho việc lắp ráp phụ kiện cũng như sử dụng các máy trắc địa được linh hoạt với mọi trường hợp.<br /> Phụ kiện đo đạc, trắc địa bao gồm nhiều loại khác nhau ứng dụng cho các thiết bị đo đạc ( máy thủy bình, máy kinh vĩ điện tử, máy toàn đạc điện tử, máy định vị GPS) như: thước thép, bật mực, đế dọi tâm, thước đẩy bánh xe, mốc sứ, thùng máy, gương sào, đế dọi tâm, chân mia, dây cáp, pin sạc,…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/PHỤ KIỆN TRẮC ĐỊA(2).png" style="width: 680px; height: 544px;" /></span></span></p> <p style="text-align: center;"> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lưu ý khi lựa chọn phụ kiện trắc địa</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải đảm bảo phù hợp với cấu tạo của máy, chức năng của máy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải cùng hãng sản xuất hoặc phải là sản phẩm chính hãng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải phù hợp với công suất của máy, tránh trường hợp chọn phụ kiện có công suất thấp hoặc lớn hơn công suất thực của máy gây hư hỏng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải có cấu tạo tính năng tương đồng với từng đời máy</span></span></li> </ul> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Phụ kiện máy(2).jpg" style="width: 620px; height: 803px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Địa chỉ mua phụ kiện trắc địa uy tín</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại phụ kiện trắc địa: chân máy toàn đạc, chân máy thủy bình, mia 5m, mia Invar, sào gương, pin máy toàn đạc, sạc pin máy toàn đạc, đế máy, cáp trút số liệu,... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> </span><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 145 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"> </span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span></span></span>', 'images' => '20211207150823dc9ff8b8d2712352c76fd4e56030baca.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Phụ kiện trắc địa', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-12', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24887', 'slug' => 'phu-kien-trac-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '211', 'rght' => '212', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '632', 'name' => 'Một số lưu ý khi chọn mua máy bộ đàm', 'code' => null, 'alias' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng chúng tôi tham khảo một số lưu ý để lựa chọn cho mình một chiếc bộ đàm phù hợp nhé!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Lựa chọn băng tần sử dụng</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm cầm tay và máy bộ đàm cố định có 2 loại băng tần là VHF (136 – 174MHz) và UHF (400 – 527MHz).<br /> <br /> Nếu mua thêm để dùng chung với máy có sẵn, phải xác định máy bộ đàm đang dùng là loại băng tần nào (VHF hay UHF) và model là gì. Trong trường hợp đây là lần đầu tiên mua bộ đàm và chỉ có nhu cầu dùng chúng với nhau thì người dùng có thể chọn loại băng tần nào cũng được. Tùy thuộc vào địa hình, khu vực sử dụng và để đảm bảo liên lạc xa nhất, tốt nhất bạn nên chú ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ở vị trí khu vực trống trải, ít vật cản nên chọn băng tần VHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại khu vực nhà cao tầng, nhiều công trình dân dụng, trong thành phố nên chọn tần số UHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cũng cần lưu ý đến khả năng được cấp phép sử dụng tần số tại vùng sử dụng bộ đàm.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Lưu ý:</strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách liên lạc tối đa giữa hai máy cầm tay tại khu vực trống trải là khoảng 3km, trong thành phố không quá 2km. Những vị trí càng đông dân cư, càng nhiều công trình kiến trúc. Mật độ dân cư đông thì cự ly sẽ rút ngắn lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ đàm cầm tay có thể liên lạc với trung tâm của mình ở cự ly xa hơn so với cự ly giữa 2 máy cầm tay. Điều kiện là máy tại trung tâm phải có công suất lớn. Và anten đặt trên cột cao (càng cao thì liên lạc càng xa).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu muốn tăng cự li liên lạc giữa các máy với nhau, có thể chọn dùng Repeater (Bộ lặp) với anten lắp trên cao.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><img alt="" src="/admin/webroot/upload/image/images/1534383704-bodam_02.jpg" style="width: 480px; height: 360px;" /></strong></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Lựa chọn dòng máy phù hợp</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tùy thuộc vào khả năng tài chính cũng như nhu cầu mà lựa chọn dòng máy phù hợp. Trên thị trường hiện nay có khá nhiều thương hiệu máy bộ đàm. Nổi bật hơn cả là các dòng máy đến từ thương hiệu Motorola, Icom và Kenwood. Các dòng sản phẩm khác được đánh giá là có độ bền kém hơn, chất lượng thu phát cũng không tốt bằng.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu dùng cho công trường xây dựng hay dịch vụ bảo vệ thì nên chọn loại có cấu hình trung bình. Motorola CP1100, CP1300, GP3188 loại không bàn phím với khả năng kháng nước, chống bụi, chống va đập tốt là một gợi ý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các công ty vận tải, vận chuyển hàng hóa/hành khách…thì có thể chọn máy bộ đàm gắn xe cố định như Motorola GM3188, GM338. Nếu công ty yêu cầu đảm bảo quản lý liên lạc tại nhiều khu vực địa lý có khoảng cách xa thì phải chọn dòng máy kĩ thuật số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Với bộ đàm dùng cho nhà hàng, khách sạn, khu công nghiệp thì nên chọn dòng máy bộ đàm cầm tay giá rẻ như Motorola MagOne A8, GP2000s, Kenwood TK-2107 hay Icom IC-F3003 đều được.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các đơn vị chuyên nghiệp mà yêu cầu sản phẩm cần phải đảm bảo an ninh để liên lạc thông suốt kể cả trong điều kiện thời tiết khắc nghiệt, môi trường phức tạp như Công an, Bộ đội, phục vụ công tác Phòng chống thiên tai, bão lũ, các công ty dầu khí…bộ đàm được lựa chọn phải là dòng chuyên nghiệp, chuyên dụng và hiệu suất cao\</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm phổ thông có giá thành tương đối rẻ, cấu hình vừa đủ đáp ứng những yêu cầu đơn giản. Vừa hài hòa về chi phí, vừa mang lại hiệu quả công việc. Trong khi đó, các dòng sản phẩm chuyên nghiệp thường có mức giá cao hơn với nhiều tính năng hơn.<br /> <br /> Có thể nói, dòng sản phẩm máy bộ đàm đến từ thương hiệu Motorola hiện đang đứng đầu về công nghệ (cả analog và digital). Nhờ vào ưu điểm là độ bền cao, khả năng chống chịu tốt cũng như cách vận hành đơn giản. Các dòng sản phẩm chuyên dụng có thể kể đến như Motorola GP3188, GP328, XiR P8200/8208, P8260/8268…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/business-radios-2021.png" style="width: 480px; height: 238px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2 style="box-sizing: border-box; margin-top: 0px; margin-bottom: 0.5rem; font-weight: 500; line-height: 1.2; font-size: 20px; color: rgb(68, 68, 68); font-family: Roboto, sans-serif;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; font-weight: 600;">3. Lựa chọn máy bộ đàm với những tính năng phù hợp</span></span></span></h2> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát RF: Máy cầm tay thường có công suất tối đa khoảng 5W, con số này càng cao thì cự ly liên lạc càng lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất âm thanh: Nếu sử dụng trong môi trường ồn ào, nhiều tiếng động. Thì nên chọn máy công suất lớn có bộ lọc âm thanh tốt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các tính năng bảo vệ: Máy được thiết kế với kết cấu vững chắc, theo tiêu chuẩn quân đội Mỹ (MIL-STD810), chống nước, chống nổ…</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mạch mã hóa và giải mã PL/DPL, CTCSS/DTCS: Tránh được những cuộc liên lạc không cần thiết khi nhiều người dùng chung 1 kênh tần số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng kích phát bằng giọng nói (VOX) để hoạt động khi rảnh tay</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng nhập tần số từ bàn phím của máy: Thường được trang bị ở các dòng máy phổ thông. Tuy vậy, tính năng này lại khiến người dùng vô tình làm sai tần số kênh đã đặt ra khiến máy bộ đàm không liên lạc được với máy khác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng bảo mật thông tin: Nhiều cấp bảo mật khác nhau như Voice Scramler, AES/DES…</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/MotorolaG3588.jpg" style="width: 480px; height: 480px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Chọn phụ kiện bộ đàm</strong></span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin bộ đàm</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên chọn pin dung lượng lớn, thời gian sử dụng lâu cho mỗi lần sạc. Pin cho máy bộ đàm nên từ 1000mAh – 2200mAh với thời gian hoạt động tối đa đến 19 giờ.<br /> Pin Li-Ion có dung lượng lớn và tuổi thọ pin cao có thể sạc bất cứ lúc nào mà không cần dùng hết trước khi sạc như các loại pin khác. Pin Ni-MH có dung lượng và tuổi thọ pin thấp hơn Li-Ion. Muốn pin sử dụng bền lâu thì không thể sạc nhồi mà phải dùng hết trước khi sạc lại. Trong trường hợp dùng lâu, để tránh bị hết pin bất ngờ, hãy mua thêm pin dự phòng để đảm bảo liên lạc được thông suốt.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ sạc</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu không có thời gian sạc pin lâu, hãy sử dụng bộ sạc nhanh, nhanh hơn bộ sạc chuẩn từ 3-5 giờ.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Loa – Micro và các loại tai nghe choàng đầu, áp cổ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo liên lạc kể cả khi đeo máy thường xuyên ở thắt lưng, trên cầu vai/gắn trên cổ áo. Phù hợp với những ai thường xuyên dùng tay cho những công việc khác như bảo an, nhân viên phục vụ…<br /> Tai nghe choàng đầu và bộ áp cổ khi dùng với máy có chức năng kích phát bằng giọng nói (VOX) sẽ giúp rảnh tay hoàn toàn khi liên lạc bằng bộ đàm. Bộ áp cổ sẽ giúp âm thanh gửi đi trong hơn, không có tiếng ồn kể cả khi đang nói trong khu vực nhiều tiếng ồn.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm của mỗi hãng khác nhau đều kèm theo anten tiêu chuẩn, cho cự li liên lạc tốt nhất. Loại cải tiến kích có thước ngắn hơn giúp máy gọn và đỡ vướng víu. Anten không phù hợp có thể làm hư hỏng máy. Do vậy, nếu cần một anten mới, hãy chọn đúng mã số của loại kèm theo máy.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/bo-dam-motorola-gp-3588-plus(1).jpg" style="width: 480px; height: 270px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ mua máy bộ đàm uy tín</span></span></h2> <p> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên phân phối các loại máy bộ đàm của các hãng Motorola, Kenwood, Icom, Hypersia,... lâu năm uy tín trên toàn quốc.</span></p> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> <span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span></span></span><br style="margin: 0px; padding: 0px;" /> </p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">@ Luôn đồng hành cùng bạn!</strong><span style="margin: 0px; padding: 0px;"> </span></span></span></p> ', 'images' => '20210709160653d0336e3b94fd76fc2ef669058d11917a.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'máy bộ đàm', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-09', 'modified' => '2026-07-12', 'status' => '1', 'view' => '15419', 'slug' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '209', 'rght' => '210', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $detailNews = array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $setting = array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ) $tin_ft = array( (int) 0 => array( 'Post' => array( 'id' => '588', 'name' => 'Hướng dẫn mua hàng', 'code' => null, 'alias' => 'huong-dan-mua-hang', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p> <span style="color:#000000;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> </span></span><span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="line-height: 107%;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></span></span> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="color:#000000;">Quý khách có thể mua hàng theo những cách sau:</span></span></span><br /> </p> <p> <span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Cách 1: </strong>Đặt hàng trực tiếp tại mục ĐẶT HÀNG (Thêm vào giỏ hàng) trên website: </span></span><span style="font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><a href="https://maytracdiasaoviet.vn/" target="_blank"><span style="color:#000000;">https://tracdiathanhdat.vn/</span></a></span></span><span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;">.</span></span></p> <p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngay sau khi tiếp nhận thông tin đặt hàng, nhân viên kinh doanh công ty sẽ gọi điện cho quý khách để xác nhận đơn hàng và tiến hành giao hàng cho quý khách ngay trong ngày.</span></span></span></p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Cách 2: </strong>Đặt hàng trực tiếp qua số hotline của công ty <br /> <br /> – Tại trụ sở Hà Nội: <strong>0913 051 734 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">– Tại VPGD Hồ Chí Minh:<strong> 0904 925 936 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Cách 3: </strong>Quý khách mua hàng trực tiếp tại địa chỉ sau:<br /> <br /> <strong>CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></span></span></span><br /> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 145 Láng Hạ, Phường Láng Hạ, Hà Nội</span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> </div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rất mong được hợp tác với Quý khách hàng trên cả nước.<br /> <br /> Trân trọng!</span></span></span></div> ', 'images' => '202104071220058398ebc1b9cf669cf602eb8040be387a.jpg', 'images_multi' => '', 'pos' => '1', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Máy trắc địa chính hãng | RTK GNSS, máy toàn đạc, máy thủy bình – Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy RTK GNSS, máy toàn đạc, máy thủy bình, GPS cầm tay chính hãng. Tư vấn kỹ thuật – giao hàng toàn quốc. Trắc địa Thành Đạt – 0913 051 734', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '4244', 'slug' => 'huong-dan-mua-hang', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '143', 'rght' => '144', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '586', 'name' => 'Chính sách thanh toán', 'code' => null, 'alias' => 'chinh-sach-thanh-toan', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> <!--[if !supportLineBreakNewLine]--><!--[endif]--></span> </span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chúng tôi c</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">hấp nhận các hình thức thanh toán bằng tiền mặt, chuyển khoản theo đúng quy định pháp luật. </span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (22).png" style="width: 320px; height: 183px;" /></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Quý khách có thể chọn các phương thức thanh toán sau đây:</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">I. Thanh toán trực tiếp tại cửa hàng<br /> <br /> II. Thanh toán qua hình thức chuyển khoản</span></strong><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Thông tin tài khoản:</span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <strong style="color: rgb(0, 0, 0); margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"><em>Chủ tài khoản</em>: CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></p> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em style="margin: 0px; padding: 0px;"><strong>Số tài khoản</strong></em><em style="margin: 0px; padding: 0px;">: <strong>0611001648635</strong> tại Ngân hàng TMCP Ngoại thương Việt Nam, chi nhánh Ba Đình<br /> <br /> <strong>Nội dung chuyển khoản</strong>: Tên công ty - Thông tin sản phẩm đã mua – Số điện thoại người chuyển tiền</em></span></span></span><br /> <br /> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Sau khi chuyển khoản hãy thông báo lại cho chúng tôi để chúng tôi kiểm tra và xác nhận lại cho Quý khách.</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">III. Thanh toán khi nhân viên đến giao nhận hàng</span></strong></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66);"> <span style="color:#000000;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">Quý khách hàng thanh toán trực tiếp bằng tiền mặt cho nhân viên giao hàng của chúng tôi ngay khi kiểm tra và nhận hàng.<br /> <br /> Mọi phản hồi và thắc mắc về việc thanh toán, Quý khách liên hệ <strong>0942 288 388</strong> để được tư vấn.</span></font><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span></span></p> ', 'images' => '20210407122232bf3e6d52a68ca60f97fc6048b14e4acc.jpg', 'images_multi' => '', 'pos' => '2', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3881', 'slug' => 'chinh-sach-thanh-toan', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '139', 'rght' => '140', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '587', 'name' => 'Chính sách vận chuyển', 'code' => null, 'alias' => 'chinh-sach-van-chuyen', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><span style="font-family:verdana,geneva,sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></strong><br /> <br /> Chúng tôi hỗ trợ giao hàng toàn quốc cho Quý khách mua hàng tại hệ thống cửa hàng của chúng tôi.</span></span><br /> </div> <div> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">Sau khi nhận được thông tin đặt hàng chúng tôi sẽ lập tức xử lý đơn hàng và phản hồi lại thông tin cho khách hàng về việc thanh toán và giao nhận.<br /> <br /> <strong>> Thời gian giao hàng </strong><br /> <br /> - Trong vòng 24 giờ nếu địa điểm giao hàng <b style="color: rgb(74, 74, 74); box-sizing: border-box;">≤ 20 km</b> tính từ cửa hàng của chúng tôi.</span></span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Trong vòng 1-2 ngày nếu địa điểm giao hàng nằm trong phạm vi <b style="box-sizing: border-box">50 - 100 km</b> </span></span><span style="font-family: Arial, sans-serif;"><o:p></o:p></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">tính từ cửa hàng của chúng tôi.<br /> <br /> - Trong vòng 3-5 ngày</span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> nếu địa điểm giao hàng từ <strong>20</strong></span><b style="font-family: tahoma, geneva, sans-serif; font-size: 14px; box-sizing: border-box;">0 km</b><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> trở lên </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">tính từ cửa hàng của chúng tôi.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trước khi vận chuyển, bộ phận giao nhận sẽ liên lạc với Quý khách hàng để xác nhận khoảng thời gian và địa điểm giao hàng cụ thể.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">> Phí vận chuyển</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> sẽ được tính theo từng giá trị đơn hàng và được thoả thuận giữa hai bên ngay trước khi giao hàng. </span></p> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px;">Mọi thắc mắc liên quan đến việc giao hàng, Quý khách hàng liên hệ số điện thoại <strong>0942 288 388</strong> để được giải đáp và giải quyết kịp thời.<br /> <br /> Trân trọng!</span></span></span></p> </div> ', 'images' => '20210407122135505ddef64809ce7ee5f9db7cfdfd3e2e.jpg', 'images_multi' => '', 'pos' => '3', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3923', 'slug' => 'chinh-sach-van-chuyen', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '141', 'rght' => '142', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '585', 'name' => 'Chính sách đổi trả', 'code' => null, 'alias' => 'chinh-sach-doi-tra', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Chúng tôi hỗ trợ đổi trả sản phẩm trong vòng 07 ngày nếu lỗi phát sinh do nhà sản xuất.<br /> <br /> Trong thời gian đổi trả, Công ty CP Công nghệ và Thương mại Thành Đạt sẽ hỗ trợ cung cấp máy móc thay thế kịp thời để công việc khảo sát, đo đạc của Quý khách không bị gián đoạn. Chi phí vận chuyển cho việc đổi trả do hai bên tự thoả thuận.</span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">> Điều kiện đổi trả: </span></span></strong></span><br /> <ul> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm phải còn nguyên tem mác.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm bị lỗi do nhà sản xuất.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm không đúng như đơn đặt hàng.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lần đổi trả cho 1 sản phẩm là 1 lần</span></span></span></li> </ul> <br /> <div style="text-align: start;"> <span style="color:#000000;"><strong><span style="text-align: justify;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">> </span></font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Việc đổi trả sẽ không được chấp nhận nếu:</span> <span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"> </span></span></strong></span></div> <ul> <li> <span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Trong quá trình sử dụng sản phẩm Quý khách không tuân thủ các chỉ dẫn của Nhà sản xuất.</span></span></li> <li> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="text-align: justify;">S</span>ản phẩm bị trầy xước, không nguyên vẹn</span></span></span></li> </ul> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, chúng tôi cũng hỗ trợ đổi trả sản phẩm vì lý do chủ quan của Quý khách hàng ( muốn đổi sang sản phẩm cùng chủng loại nhưng khác về màu sắc, hãng sản xuất hay thông số kỹ thuật). Chi phí cho việc đổi trả này do Quý khách hàng chịu.</span></span><br /> <br /> <span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"><img alt="" src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/lien-he.jpg" style="margin: 0px; padding: 8px 0px; height: 36px; max-width: 100%; vertical-align: middle; border: 0px; opacity: 1; font-size: 13px; width: 38px;" /><span style="margin: 0px; padding: 0px; font-size: 13px;"> </span></strong></span></span><span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"> </strong></span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Liên hệ hotline <strong>0913 051 734</strong> để được tư vấn đổi trả theo đúng qui định.</span></span>', 'images' => '202104071223177d9b7f6e319f9fa90078c7c61ed9bd19.jpg', 'images_multi' => '', 'pos' => '4', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3915', 'slug' => 'chinh-sach-doi-tra', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '137', 'rght' => '138', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '583', 'name' => 'Chính sách bảo hành', 'code' => null, 'alias' => 'chinh-sach-bao-hanh', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="color: rgb(66, 66, 66); text-align: justify;">Tất cả các sản phẩm mua tại hệ thống cửa hàng của chúng tôi đều được bảo hành chính hãng theo quy định của nhà sản xuất. </span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(66, 66, 66); text-align: justify;">Chúng tôi hỗ trợ kỹ thuật 24/7 qua số hotline <strong>0913 051 734</strong> trong suốt quá trình Quý khách sử dụng sản phẩm.</span></span></span></div> <div> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">1. Sản phẩm được bảo hành miễn phí: </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm sẽ được bảo hành miễn phí nếu sản phẩm đó còn thời hạn bảo hành (được tính kể từ ngày mua hàng).</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Thời hạn bảo hành được ghi trên Tem Bảo Hành và theo quy định của từng Nhà sản xuất đối với tất cả các sự cố về mặt kỹ thuật.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Có Tem bảo hành trên sản phẩm.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi sản phẩm có sự cố kĩ thuật chúng tôi sẽ trực tiếp khắc phục sự cố tại cửa hàng hoặc thay mặt khách hàng mang sản phẩm tới Trung Tâm Bảo Hành của hãng.</span></span></li> </ul> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">2. Những trường hợp không được bảo hành (sửa chữa có tính phí): </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm đã quá thời hạn bảo hành hoặc không có Tem bảo hành trên máy.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hư hỏng do tác động cơ học làm rơi, vỡ, va đập, trầy xước, móp méo, ẩm ướt, hoen rỉ, chảy nước hoặc do hỏa hoạn, thiên tai gây nên.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hỏng do sử dụng không đúng cách, sử dụng sai điện áp quy định.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Tự ý tháo dỡ, sửa chữa sản phẩm</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span><br /> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"> </span></span></div> ', 'images' => '20210407123801c4049edabae0c54e2347c82e21413ec3.jpg', 'images_multi' => '', 'pos' => '5', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3646', 'slug' => 'chinh-sach-bao-hanh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '133', 'rght' => '134', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '584', 'name' => 'Chính sách bảo mật thông tin', 'code' => null, 'alias' => 'chinh-sach-bao-mat-thong-tin', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">1. Mục đích thu nhập thông tin cá nhân</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51);">Thông tin cá nhân mà chúng tôi thu thập bao gồm: họ tên, địa chỉ giao hàng, địa chỉ email, số điện thoại cố định, số điện thoại di động, cookies.</span></p> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Đối với các giao dịch thanh toán qua cổng thanh toán trực tuyến, Chúng tôi không lưu trữ thông tin số tài khoản, số thẻ ngân hàng của khách hàng, những thông tin này sẽ được cổng thanh toán lưu trữ để phục vụ việc đối soát giao dịch.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân khách hàng sẽ được sử dụng cho một hoặc tất cả các mục đích sau đây:</span></span></span></span> <ul style="margin: 0px; padding: 0px 0px 0px 15px;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Giao hàng cho quý khách đã mua hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông báo về việc giao hàng và hỗ trợ khách hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Cung cấp thông tin liên quan đến sản phẩm</span></span></span></span></li> </ul> </li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoài ra, chúng tôi sẽ sử dụng thông tin của quý khách cung cấp để hỗ trợ quản lý tài khoản khách hàng (nếu có); xác nhận và thực hiện các giao dịch tài chính liên quan đến các khoản thanh toán trực tuyến của quý khách;</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi không được phép thu nhập thông tin nếu khách hàng không tự nguyện, cũng không sử dụng phương thức thu thập thông tin khách hàng bằng các hình thức bất hợp pháp.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">2. Phạm vi sử dụng thông tin</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân thu thập được sẽ chỉ được sử dụng trong nội bộ công ty.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể chia sẻ tên và địa chỉ của quý khách cho dịch vụ chuyển phát nhanh có uy tín để giao hàng cho quý khách theo cam kết.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">3. Thời gian lưu trữ thông tin</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">Thông tin khách hàng được lưu trữ nội bộ cho đến khi có yêu cầu xóa thông tin từ phía khách hàng.</span></p> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Những người hoặc tổ chức có thể được tiếp cận với thông tin </span></span></h2> <br /> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng được tiếp cận với thông tin cá nhân của khách hàng thuộc một trong những trường hợp sau:</span></span><br /> </div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Nhân viên của Công ty Cổ phần Công nghệ và thương mại Thành Đạt</span></span></div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Các đối tác có ký hợp đồng thực hiện 1 phần dịch vụ của Công ty. Các đối tác này sẽ nhận được những thông tin theo thỏa thuận hợp đồng (có thể 1 phần hoặc toàn bộ thông tin tuy theo điều khoản hợp đồng) để tiến hành hỗ trợ người dùng sử dụng dịch vụ do Công ty cung cấp.</span></span></div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ của đơn vị thu thập và quản lý thông tin</span></span></h2> <div style="text-align: justify;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(bao gồm cách thức liên lạc để người tiêu dùng có thể hỏi về hoạt động thu thập, xử lý thông tin liên quan đến cá nhân mình)</span></span></em></div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ của đơn vị thu thập và quản lý thông tin:</span></span><br /> </div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Công ty Cổ phần Công nghệ và thương mại Thành Đạt </span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Địa chỉ: số 157 phố Đặng Văn Ngữ, P. Phương Liên, Q. Đống Đa, Tp. Hà Nội</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Điện thoại: 0243 7764930</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Email: tracdiathanhdat@gmail.com<span style="white-space: pre;"> </span></span></span></strong></div> </div> </div> <p style="text-align: justify;"> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Người dùng có thể gọi điện tới tổng đài hỗ trợ và chăm sóc khách hàng </span><strong style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify; margin: 0px; padding: 0px;">0949 322 456</strong><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để điều chỉnh hoặc xóa đi dữ liệu cá nhân của mình.</span><br /> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">6. Cam kết bảo mật thông tin cá nhân khách hàng</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Không bán, chia sẻ hay trao đổi thông tin cá nhân của khách hàng thu thập trên trang web cho một bên thứ ba nào khác.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoại trừ các trường hợp về sử dụng thông tin cá nhân như đã nêu trong chính sách này,chúng tôi cam kết không tiết lộ thông tin cá nhân của bạn ra ngoài. Trong một số trường hợp, chúng tôi có thể thuê một đơn vị độc lập để tiến hành các dự án nghiên cứu thị trường và khi đó thông tin của bạn sẽ được cung cấp cho đơn vị này để tiến hành dự án. Bên thứ ba này sẽ bị ràng buộc bởi một thỏa thuận về bảo mật mà theo đó họ chỉ được phép sử dụng những thông tin được cung cấp cho mục đích hoàn thành dự án.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể tiết lộ hoặc cung cấp thông tin cá nhân của bạn trong các trường hợp thật sự cần thiết như sau: (a) khi có yêu cầu của các cơ quan pháp luật; (b) trong trường hợp mà chúng tôi tin rằng điều đó sẽ giúp chúng tôi bảo vệ quyền lợi chính đáng của mình trước pháp luật.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">7. Thay đổi về chính sách</span></span></span></span></h2> <p style="text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Nội dung của “Chính sách bảo mật” này có thể thay đổi để phù hợp với các nhu cầu của Công Ty CP Công nghệ và Thương Mại Thành Đạt cũng như nhu cầu và sự phản hồi từ khách hàng (nếu có). </span></span></span></span></p> </div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi hiểu rằng quyền lợi của bạn trong việc bảo vệ thông tin cá nhân cũng chính là trách nhiệm của chúng tôi nên trong bất kỳ trường hợp có thắc mắc, góp ý nào liên quan đến chính sách bảo mật, việc thông tin cá nhân bị sử dụng sai mục đích vui lòng liên hệ qua số điện thoại <strong>0949 322 456</strong> hoặc gửi phản hồi về địa chỉ email: <em><strong>tracdiathanhdat@gmail.com.</strong></em><br /> <br /> Trân trọng!</span></span></div> ', 'images' => '202104071236589b665b2accf17da9077cea4c5dad8e94.jpg', 'images_multi' => '', 'pos' => '6', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3920', 'slug' => 'chinh-sach-bao-mat-thong-tin', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '135', 'rght' => '136', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) ) $slideshow = array( (int) 0 => array( 'Slideshow' => array( 'id' => '1158', 'name' => '', 'images' => '202607021457295d6b626c7966fea8ed15b90188f75e84.png', 'created' => '2026-07-02 14:57:29', 'modified' => '2026-07-02 14:57:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 1 => array( 'Slideshow' => array( 'id' => '1157', 'name' => '', 'images' => '20260630144106967d7220891508e0bc589157b72a4a6f.png', 'created' => '2026-06-30 14:41:06', 'modified' => '2026-06-30 14:41:06', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 2 => array( 'Slideshow' => array( 'id' => '1156', 'name' => '', 'images' => '20260627100900c4525d4b0ad85bb7ed6e5f31fbe008ce.png', 'created' => '2026-06-27 10:09:00', 'modified' => '2026-06-27 10:09:00', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 3 => array( 'Slideshow' => array( 'id' => '1153', 'name' => '', 'images' => '2026060910315463c4488ef0eebcd97a80c7be838ec857.png', 'created' => '2026-06-09 10:31:54', 'modified' => '2026-06-09 10:31:54', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 4 => array( 'Slideshow' => array( 'id' => '1151', 'name' => '', 'images' => '20260505105747cef035cfde3d3e4fc486dcc70906dab9.png', 'created' => '2026-05-05 10:57:47', 'modified' => '2026-05-05 10:57:47', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 5 => array( 'Slideshow' => array( 'id' => '1147', 'name' => '', 'images' => '20260504151401463305739b212edcd50d4df28ea21663.png', 'created' => '2026-05-04 15:14:01', 'modified' => '2026-05-04 15:14:01', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 6 => array( 'Slideshow' => array( 'id' => '1111', 'name' => '', 'images' => '2025091214412921cbc3cbc42d3d64fe4364ad8b7a9b7e.png', 'created' => '2025-09-12 14:41:29', 'modified' => '2025-09-12 14:41:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 7 => array( 'Slideshow' => array( 'id' => '1099', 'name' => '', 'images' => '20250707100715baf5ecd84c6a8766519b98f66eec1511.png', 'created' => '2025-07-07 10:07:15', 'modified' => '2025-07-07 10:07:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 8 => array( 'Slideshow' => array( 'id' => '1096', 'name' => '', 'images' => '202504251616158fbd912c821051db2e9e1ebe215c4da4.png', 'created' => '2025-04-25 16:16:15', 'modified' => '2025-04-25 16:16:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 9 => array( 'Slideshow' => array( 'id' => '1055', 'name' => '', 'images' => '202502071107533894de97e081b06e5749a83e6bed2399.png', 'created' => '2025-02-07 11:07:53', 'modified' => '2025-02-07 11:07:53', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 10 => array( 'Slideshow' => array( 'id' => '1008', 'name' => '', 'images' => '20240822084848c3089726a8fff539a5f1adcaaca9cd73.png', 'created' => '2024-08-22 08:48:48', 'modified' => '2024-08-22 08:48:48', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 11 => array( 'Slideshow' => array( 'id' => '961', 'name' => '', 'images' => '202403121029063cfd7328162ff668a881f7e275a1a01d.png', 'created' => '2024-03-12 10:29:08', 'modified' => '2024-03-12 10:29:08', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 12 => array( 'Slideshow' => array( 'id' => '850', 'name' => '', 'images' => '20230605160932d4a880ffcab96141d7a3538bf17255de.png', 'created' => '2023-06-05 16:09:33', 'modified' => '2023-12-25 09:27:46', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 13 => array( 'Slideshow' => array( 'id' => '817', 'name' => '', 'images' => '20230306160629b7490cbbbd5cfd081d8ec1930914a677.png', 'created' => '2023-03-06 16:06:29', 'modified' => '2025-12-23 09:03:28', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 14 => array( 'Slideshow' => array( 'id' => '617', 'name' => '', 'images' => '20220713143712ec1e28dc996e7d39d7535a730ead176e.png', 'created' => '2022-07-13 14:37:12', 'modified' => '2024-12-02 16:11:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ) ) $adv_khuyenmai = array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ) $doitac = array( (int) 0 => array( 'Advertisement' => array( 'id' => '36', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/bosch', 'images' => '20151223081939be7f9ca66f2fb4e760fb991d89d74002.png', 'display' => '3', 'created' => '2015-12-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '33', 'rght' => '34' ) ), (int) 1 => array( 'Advertisement' => array( 'id' => '33', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/pentax', 'images' => '20151216094854d7903c4f5ae6da9780bc88cbb048d417.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '27', 'rght' => '28' ) ), (int) 2 => array( 'Advertisement' => array( 'id' => '16', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/topcon', 'images' => '2015121609180430293457191c29e0d0d7a715d26041bd.png', 'display' => '3', 'created' => '2015-12-10', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '7', 'rght' => '8' ) ), (int) 3 => array( 'Advertisement' => array( 'id' => '27', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/trimple', 'images' => '2015121609470060450f77189189cce8edb27ef59c46d2.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '15', 'rght' => '16' ) ), (int) 4 => array( 'Advertisement' => array( 'id' => '28', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20151216094709d0c1b1d5ffcc17a598904261de69c485.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '17', 'rght' => '18' ) ), (int) 5 => array( 'Advertisement' => array( 'id' => '29', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/kenwood', 'images' => '201512160947288286f4b931bdbc0e64dfd484fc6c12e5.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '19', 'rght' => '20' ) ), (int) 6 => array( 'Advertisement' => array( 'id' => '30', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/nikon', 'images' => '202210171542300b1b7918f461a4dd8d877236543412d8.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '21', 'rght' => '22' ) ), (int) 7 => array( 'Advertisement' => array( 'id' => '34', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sincon', 'images' => '20151216095020f699fb43b225af9cb76ffe022e057faf.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '29', 'rght' => '30' ) ), (int) 8 => array( 'Advertisement' => array( 'id' => '31', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/garmin', 'images' => '201512160948147d3b76212a8ebdd03d45fc49a95a9868.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '23', 'rght' => '24' ) ), (int) 9 => array( 'Advertisement' => array( 'id' => '26', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/leica', 'images' => '20151216094654c3a83e015935188821aa9ee65e6b322f.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '13', 'rght' => '14' ) ), (int) 10 => array( 'Advertisement' => array( 'id' => '25', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sokkia', 'images' => '2015121609464772166f729226cebe52ae986c2699c3a1.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '11', 'rght' => '12' ) ), (int) 11 => array( 'Advertisement' => array( 'id' => '24', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/foif', 'images' => '2015121609482733afba0b93b9383e6ea26a08124e8a76.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '9', 'rght' => '10' ) ), (int) 12 => array( 'Advertisement' => array( 'id' => '54', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424094203a24f4d5a812351010a6355d888b944ec.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '57', 'rght' => '58' ) ), (int) 13 => array( 'Advertisement' => array( 'id' => '55', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '2021042409421996a13aed03c03b49b7d965db5dbcfdd6.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '59', 'rght' => '60' ) ), (int) 14 => array( 'Advertisement' => array( 'id' => '56', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/motorola', 'images' => '20220805103835e45b76131731a737df5e8dec49916375.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '61', 'rght' => '62' ) ), (int) 15 => array( 'Advertisement' => array( 'id' => '57', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/yamayo', 'images' => '20250304144532ee8e939d0c9e884e1a50ad352b272730.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2025-03-04', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '63', 'rght' => '64' ) ), (int) 16 => array( 'Advertisement' => array( 'id' => '58', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424100013ce6e6d048914eccdc312d53e64e566b7.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '65', 'rght' => '66' ) ), (int) 17 => array( 'Advertisement' => array( 'id' => '59', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/geomax', 'images' => '2021051416090922e7bec3a6dfe8041780aa125f5f4932.jpg', 'display' => '3', 'created' => '2021-05-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '67', 'rght' => '68' ) ), (int) 18 => array( 'Advertisement' => array( 'id' => '60', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/south', 'images' => '20210623100351b1da5960a28a9deb6af4e028880d625b.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '69', 'rght' => '70' ) ), (int) 19 => array( 'Advertisement' => array( 'id' => '62', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/e-survey', 'images' => '20211124221103bda9f65e28426fc1f93c4f5f223cd1bc.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-11-24', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '71', 'rght' => '72' ) ), (int) 20 => array( 'Advertisement' => array( 'id' => '68', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hi-target', 'images' => '2021112422134905fc59de564b69bfad9ca0b5f7204ffa.png', 'display' => '3', 'created' => '2021-08-05', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '73', 'rght' => '74' ) ), (int) 21 => array( 'Advertisement' => array( 'id' => '73', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/dji', 'images' => '2021102921504774fd5e8eec5eed69455accd89f7429e5.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '83', 'rght' => '84' ) ), (int) 22 => array( 'Advertisement' => array( 'id' => '74', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/spectra-geospatial-spectra-precision', 'images' => '202110292149162a2a919ea2a12b8255429f33eb51a1a8.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '85', 'rght' => '86' ) ), (int) 23 => array( 'Advertisement' => array( 'id' => '75', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/efix', 'images' => '202207131224432d602a710c7f1a152566aec421d281d7.png', 'display' => '3', 'created' => '2022-07-13', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '87', 'rght' => '88' ) ), (int) 24 => array( 'Advertisement' => array( 'id' => '76', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/chcnav', 'images' => '20220714162725db2138b3dcabb86eedc65c4ba1f6ccce.jpg', 'display' => '3', 'created' => '2022-07-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '89', 'rght' => '90' ) ), (int) 25 => array( 'Advertisement' => array( 'id' => '78', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202208051039345c0c28b21fe05a0c9d4f65b176fe7063.jpg', 'display' => '3', 'created' => '2022-08-05', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '93', 'rght' => '94' ) ), (int) 26 => array( 'Advertisement' => array( 'id' => '79', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202210171541561896d0eb31d272d3d99a9a8c0d3582fa.png', 'display' => '3', 'created' => '2022-10-17', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '95', 'rght' => '96' ) ), (int) 27 => array( 'Advertisement' => array( 'id' => '100', 'name' => null, 'link' => '', 'images' => '20230515143931e088ce1b8d5b9bcf57916a733e5ff5e3.jpg', 'display' => '3', 'created' => '2023-05-15', 'modified' => '2023-05-15', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '117', 'rght' => '118' ) ), (int) 28 => array( 'Advertisement' => array( 'id' => '107', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/bua-dung-cho-khao-sat-dia-chat-estwing-e3-22p.html', 'images' => '20240130151328303b311c40a2276c91bf7e4f0aa460ce.png', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '125', 'rght' => '126' ) ), (int) 29 => array( 'Advertisement' => array( 'id' => '108', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/ong-nhom-celestron-nature-dx-10-42.html', 'images' => '20240130151701574ebc151c3252c2eb93d6504efdc5ab.jpg', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '127', 'rght' => '128' ) ), (int) 30 => array( 'Advertisement' => array( 'id' => '114', 'name' => null, 'link' => '', 'images' => '20250917151944a9ff8314bd4af3bf87c9037dceceff53.png', 'display' => '3', 'created' => '2025-09-17', 'modified' => '2025-09-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '131', 'rght' => '132' ) ) ) $chayphai = array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ) $chaytrai = array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ) $chiasekinhnghiem = array() $list_menu_footer = array() $danhmuc_left_parent_sphot = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc_left_parent = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc = array( (int) 0 => array( 'Catproduct' => array( 'id' => '1', 'name' => 'Trang chủ', 'slug' => 'trang-chu' ) ), (int) 1 => array( 'Catproduct' => array( 'id' => '3', 'name' => 'Giới thiệu ', 'slug' => 'gioi-thieu' ) ), (int) 2 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ), (int) 3 => array( 'Catproduct' => array( 'id' => '5', 'name' => 'Phần mềm - HDSD ', 'slug' => 'phan-mem-hdsd' ) ), (int) 4 => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'slug' => 'kien-thuc-ung-dung' ) ), (int) 5 => array( 'Catproduct' => array( 'id' => '6', 'name' => 'Liên hệ', 'slug' => 'lien-he' ) ) ) $support = array( (int) 0 => array( 'Support' => array( 'id' => '13', 'name' => 'Co so Ha noi', 'phone' => '098 987 678', 'yahoo' => 'duycuong7640', 'skype' => 'duycuong7640', 'pos' => '0', 'created' => '2013-09-13', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ), (int) 1 => array( 'Support' => array( 'id' => '16', 'name' => 'Co so TP.HCM', 'phone' => '3252 436 432', 'yahoo' => 'duycuong7640', 'skype' => 'tuvantubep', 'pos' => '0', 'created' => '2014-01-15', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ) ) $content_for_layout = '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ' $scripts_for_layout = '' $count = (int) 0 $price = (int) 0 $sl = (int) 0 $cap1 = array( 'Catproduct' => array( 'id' => '5', 'name' => 'Phần mềm - HDSD ', 'slug' => 'phan-mem-hdsd' ) ) $dm_c2 = array() $cap2 = array( 'Catproduct' => array( 'id' => '47', 'name' => 'Sản phẩm khác', 'parent_id' => '2', 'alias' => 'san-pham-khac', 'images' => '2024010816004972262bc63fc2344d41a2a0d35c8176a7.png', 'lft' => '28', 'rght' => '29', 'pos' => '14', 'status' => '1', 'title_seo' => 'địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,..', 'meta_key' => 'địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,..', 'meta_des' => 'Chuyên cung cấp địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,.. Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2016-01-25', 'modified' => '2024-01-08', 'slug' => 'san-pham-khac', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) $dm_c3 = array()include - APP/View/Elements/menu.ctp, line 56 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::element() - CORE/Cake/View/View.php, line 424 include - APP/View/Layouts/home.ctp, line 169 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::renderLayout() - CORE/Cake/View/View.php, line 539 View::render() - CORE/Cake/View/View.php, line 483 Controller::render() - CORE/Cake/Controller/Controller.php, line 957 ProductController::chitiet() - APP/Controller/ProductController.php, line 135 ReflectionMethod::invokeArgs() - [internal], line ?? Controller::invokeAction() - CORE/Cake/Controller/Controller.php, line 485 Dispatcher::_invoke() - CORE/Cake/Routing/Dispatcher.php, line 186 Dispatcher::dispatch() - CORE/Cake/Routing/Dispatcher.php, line 161 [main] - APP/webroot/index.php, line 92
Notice (8): Undefined index: name_eng [APP/View/Elements/menu.ctp, line 56]Code Context<div class="accordion-heading"><a class="accordion-toggle" <?php if(!empty($dm_c2)){?>data-toggle="collapse" data-parent="#accordion2" href="#collapse<?php echo $cap1['Catproduct']['id'];?>" title="<?php echo $cap1['Catproduct']['name'.LANGUAGE];?>"<?php }else{?>href="<?php echo DOMAIN.$cap1['Catproduct']['slug'];?>"<?php }?>><?php echo $cap1['Catproduct']['name'.LANGUAGE];?>$viewFile = '/home/tracdiathanhda/domains/tracdiathanhdat.vn/public_html/app/View/Elements/menu.ctp' $dataForView = array( 'cat12' => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'description_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'keywords_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'title_for_layout' => 'Máy kinh vĩ', 'tinmoiup' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'tinlq' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'detailNews' => array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'setting' => array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ), 'tin_ft' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'slideshow' => array( (int) 0 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 1 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 2 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 3 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 4 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 5 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 6 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 7 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 8 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 9 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 10 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 11 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 12 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 13 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 14 => array( 'Slideshow' => array( [maximum depth reached] ) ) ), 'adv_khuyenmai' => array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ), 'doitac' => array( (int) 0 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 1 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 2 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 3 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 4 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 5 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 6 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 7 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 8 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 9 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 10 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 11 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 12 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 13 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 14 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 15 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 16 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 17 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 18 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 19 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 20 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 21 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 22 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 23 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 24 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 25 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 26 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 27 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 28 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 29 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 30 => array( 'Advertisement' => array( [maximum depth reached] ) ) ), 'chayphai' => array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ), 'chaytrai' => array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ), 'chiasekinhnghiem' => array(), 'list_menu_footer' => array(), 'danhmuc_left_parent_sphot' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc_left_parent' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'support' => array( (int) 0 => array( 'Support' => array( [maximum depth reached] ) ), (int) 1 => array( 'Support' => array( [maximum depth reached] ) ) ), 'content_for_layout' => '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ', 'scripts_for_layout' => '' ) $cat12 = array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $description_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $keywords_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $title_for_layout = 'Máy kinh vĩ' $tinmoiup = array( (int) 0 => array( 'Post' => array( 'id' => '823', 'name' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật – Những bước quan trọng để đảm bảo độ chính xác', 'code' => null, 'alias' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-–-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập trạm Base RTK đúng cách có quan trọng không? Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Thiết lập trạm Base RTK đúng cách có quan trọng không?<br /> <br /> Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.<br /> <br /> Mặc dù giao diện phần mềm của mỗi hãng có thể khác nhau, quy trình thiết lập Base nhìn chung đều tuân theo các nguyên tắc giống nhau. Dưới đây là các bước cơ bản giúp triển khai một trạm Base RTK ổn định và đáng tin cậy.</em><br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7881291487147_f174a50258d6ad97ccd34f717df81a2b.jpg" style="width: 800px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Chọn vị trí đặt Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quan trọng nhất trước khi bật máy. Một vị trí tốt nên đáp ứng các điều kiện sau:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thoáng, có góc quan sát bầu trời rộng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh cây lớn, mái che hoặc công trình cao tầng che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế đặt gần tường kính, mái tôn hoặc mặt nước để giảm hiện tượng phản xạ tín hiệu (Multipath).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh gần đường dây điện cao thế hoặc nguồn phát sóng mạnh nếu có thể.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nền đất hoặc mặt bằng ổn định, ít rung động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu đặt Base trên mốc khống chế, cần đảm bảo mốc không bị xê dịch trong suốt quá trình đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lắp chân máy và định tâm</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi chọn vị trí phù hợp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở chân máy chắc chắn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều chỉnh chiều cao thuận tiện cho việc thao tác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định tâm chính xác trên mốc bằng dọi quang học hoặc dọi laser (nếu có).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng bọt thủy theo hướng dẫn của thiết bị.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trường hợp sử dụng chân máy thông thường ngoài hiện trường, nên kiểm tra lại việc định tâm sau khi siết chặt các khóa chân máy vì quá trình thao tác có thể làm lệch vị trí ban đầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Đo chiều cao anten</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten là một thông số rất quan trọng. Thông thường, phần mềm sẽ yêu cầu người dùng nhập:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao nghiêng (Slant Height), hoặc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao đứng (Vertical Height).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần đo đúng theo phương pháp mà phần mềm yêu cầu.<br /> <br /> > Một số lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng thước chuyên dụng nếu có.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo ít nhất hai lần để kiểm tra.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại đơn vị (mét hoặc milimét).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không ước lượng bằng mắt.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc nhập sai chiều cao anten sẽ làm sai tọa độ của trạm Base và có thể ảnh hưởng đến toàn bộ dữ liệu hiệu chỉnh RTK.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Thiết lập tọa độ Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quyết định hệ quy chiếu mà Rover sẽ sử dụng. <br /> <br /> 4.1 Trường hợp 1: Base đặt trên điểm đã biết tọa độ (<strong>Known Point</strong>)<br /> <br /> Đây là phương pháp được ưu tiên. Người dùng nhập chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X, Y, H hoặc B, L, H.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ tọa độ tương ứng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi xác nhận, Base sẽ phát dữ liệu hiệu chỉnh dựa trên tọa độ đã biết.<br /> <br /> > Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ tin cậy cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với đo địa chính, khảo sát công trình, hoàn công và các công việc yêu cầu liên kết với hệ tọa độ hiện có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 4.2 Trường hợp 2: <strong>Base Here</strong> (Base tự xác định tọa độ)<br /> <br /> Nếu chưa có mốc khống chế, người dùng có thể để máy tự xác định vị trí hiện tại (Base Here hoặc Autonomous).<br /> Phương pháp này thường được sử dụng khi:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát sơ bộ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập lưới khống chế tạm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình chưa yêu cầu liên kết với hệ tọa độ chính thức.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu ý rằng tọa độ Base Here chỉ mang tính tương đối. Nếu cần liên kết với hệ tọa độ công trình hoặc VN-2000, nên đo khống chế hoặc sử dụng các phương pháp chuyển đổi phù hợp trước khi triển khai chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cấu hình truyền dữ liệu cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Base có tọa độ, cần cấu hình phương thức truyền dữ liệu hiệu chỉnh đến Rover. Hai phương thức phổ biến hiện nay là:<br /> <br /> <strong>5.1 Truyền bằng Radio UHF</strong><br /> <br /> Khi dùng phương thức này cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tần số phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Băng thông (Bandwidth).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao thức truyền (Protocol).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten UHF đã được lắp đúng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base và Rover phải sử dụng cùng cấu hình để có thể liên lạc.<br /> <br /> <strong>5.2 Truyền qua Internet (NTRIP)</strong><br /> <br /> Trong trường hợp sử dụng mạng Internet nội bộ hoặc triển khai Base riêng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra kết nối 4G/5G hoặc Wi-Fi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra địa chỉ IP hoặc Caster.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Port.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mountpoint.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tài khoản và mật khẩu nếu có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Kiểm tra trạng thái phát cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi hoàn tất cấu hình, cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base đã bắt đủ số lượng vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đã bắt đầu phát dữ liệu cải chính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không xuất hiện cảnh báo lỗi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radio hoặc Internet hoạt động ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin hoặc nguồn ngoài đủ cho thời gian làm việc.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các hệ thống Radio, nên kiểm tra thêm cường độ tín hiệu giữa Base và Rover trước khi bắt đầu đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Kiểm tra Rover đã FIX ổn định</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Rover kết nối với Base, không nên đo ngay. <br /> <br /> Nên kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm đạt FIX.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lượng vệ tinh ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PDOP ở mức phù hợp.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Age of Correction thấp và ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số RMS hoặc Estimated Precision nằm trong giới hạn cho phép của công việc.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu Rover liên tục chuyển giữa FIX và FLOAT, cần kiểm tra lại:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách đến Base.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu Radio hoặc Internet.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình truyền dữ liệu.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Một số lỗi thường gặp khi thiết lập Base</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đặt Base không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt dưới tán cây, gần nhà cao tầng hoặc gần nguồn phản xạ mạnh có thể làm giảm chất lượng quan sát GNSS.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo sai chiều cao anten</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá phổ biến và có thể ảnh hưởng đến kết quả tính toán tọa độ của trạm Base.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai tọa độ Base</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ, sai kinh tuyến trục, sai cao độ hoặc nhập nhầm tọa độ sẽ khiến Rover đo sai toàn bộ.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai cấu hình Radio</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác tần số, giao thức hoặc công suất giữa Base và Rover sẽ khiến Rover không nhận được dữ liệu hiệu chỉnh.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Di chuyển Base trong khi đang đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu chân máy bị dịch chuyển trong quá trình làm việc, toàn bộ kết quả sau thời điểm dịch chuyển đều có thể không còn đảm bảo độ tin cậy và nên được kiểm tra hoặc đo lại.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguồn điện không đủ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base mất nguồn hoặc khởi động lại giữa ca đo sẽ làm gián đoạn việc truyền dữ liệu hiệu chỉnh đến Rover.<br /> <br /> >>> Thiết lập Base RTK không chỉ là vài thao tác trên bộ điều khiển mà còn bao gồm việc lựa chọn vị trí đặt máy, định tâm chính xác, nhập đúng chiều cao anten, cấu hình tọa độ và kiểm tra trạng thái hoạt động của toàn bộ hệ thống. Thực hiện đúng các bước ngay từ đầu sẽ giúp Rover nhận dữ liệu hiệu chỉnh ổn định, giảm thời gian xử lý sự cố ngoài thực địa và nâng cao độ tin cậy của kết quả đo.<br /> <br /> Mặc dù tên gọi các chức năng hoặc giao diện có thể khác nhau giữa các hãng, nguyên tắc thiết lập trạm Base về cơ bản vẫn tương tự. Nắm vững các nguyên lý này sẽ giúp người sử dụng dễ dàng làm việc với nhiều dòng RTK khác nhau.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 260626.png" style="width: 800px; height: 533px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Liên hệ ngay <a href="https://zalo.me/0913051734"><span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt qua Zalo</strong></span></a> để được tư vấn chọn máy phù hợp nhất!</span></span><br /> <a class="zalo-float" href="https://zalo.me/0949322456" rel="noopener" target="_blank"> <span class="zalo-icon">Z</span> <span class="zalo-text">Nhắn Zalo</span> </a> <style type="text/css"> .zalo-float { position: fixed; right: 20px; bottom: 90px; z-index: 9999; display: flex; align-items: center; gap: 8px; background: #0068ff; color: #fff; padding: 12px 16px; border-radius: 999px; font-weight: 700; font-size: 15px; text-decoration: none; box-shadow: 0 8px 24px rgba(0,0,0,0.22); } .zalo-float:hover { transform: translateY(-2px); opacity: 0.95; } .zalo-icon { width: 28px; height: 28px; border-radius: 50%; background: #fff; color: #0068ff; display: flex; align-items: center; justify-content: center; font-weight: 800; } @media (max-width: 768px) { .zalo-float { right: 14px; bottom: 80px; padding: 11px 14px; font-size: 14px; } }</style> ', 'images' => '202606260951032f4d94b16f8c4b40c845fa69fd0c4dc4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật từ A đến Z', 'meta_key' => '', 'meta_des' => 'Hướng dẫn chi tiết cách thiết lập trạm Base RTK: chọn vị trí, định tâm, đo chiều cao anten, cấu hình Known Point hoặc Base Here, Radio/NTRIP và các lỗi thường gặp.', 'created' => '2026-06-26', 'modified' => '2026-07-12', 'status' => '1', 'view' => '525', 'slug' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '557', 'rght' => '558', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '822', 'name' => 'Hiểu đúng về RTCM 1021–1027, Helmert (Bursa-Wolf), 7 tham số và chuyển đổi hệ tọa độ', 'code' => null, 'alias' => 'hieu-dung-ve-rtcm-1021–1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàncầu sang hệ tọa độ làm việc tại địa phương.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàn cầu sang hệ tọa độ làm việc tại địa phương.<br /> <br /> Vậy RTK thực chất đo trong hệ nào?<br /> <br /> Máy thu GNSS không đo trực tiếp trong hệ tọa độ VN-2000. Thay vào đó, thiết bị xác định vị trí trong một hệ quy chiếu địa tâm toàn cầu (global geocentric reference frame), chẳng hạn như WGS84 hoặc các realization gần với ITRF (International Terrestrial Reference Frame).<br /> <br /> Trong khi đó, tại Việt Nam, phần lớn bản đồ địa hình, bản đồ địa chính, hồ sơ thiết kế và công trình lại sử dụng hệ tọa độ VN-2000 hoặc hệ tọa độ công trình. <br /> <br /> Vì vậy, trước khi có thể sử dụng ngoài thực địa, kết quả đo GNSS cần được chuyển đổi sang hệ tọa độ làm việc.<br /> <br /> Có thể hình dung quy trình tổng quát như sau: <strong>GNSS/RTK → WGS84 hoặc ITRF (realization cụ thể) → Chuyển đổi hệ quy chiếu và phép chiếu bản đồ (khi cần) → VN-2000 hoặc hệ tọa độ công trình.</strong><br /> <br /> <em>Lưu ý: WGS84 và ITRF đều có nhiều phiên bản (realizations) được cập nhật theo thời gian. Trong hầu hết công việc RTK thông thường, quá trình này đã được phần mềm RTK hoặc dịch vụ CORS xử lý. Tuy nhiên, với các ứng dụng yêu cầu độ chính xác cao hoặc xử lý dữ liệu nhiều thời kỳ, vẫn cần quan tâm đến reference frame và epoch của dữ liệu.</em></span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. 7 tham số là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trắc địa, một trong những mô hình phổ biến để chuyển đổi giữa hai hệ quy chiếu là phép biến đổi 7 tham số (Seven-Parameter Transformation).<br /> <br /> Bộ tham số gồm: </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔX: Tịnh tiến theo trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔY: Tịnh tiến theo trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔZ: Tịnh tiến theo trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rx: Góc quay quanh trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ry: Góc quay quanh trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rz: Góc quay quanh trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Scale: Hệ số tỷ lệ (ppm)</span></span></li> </ul> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/coordtrans datum transformation.gif" style="width: 613px; height: 407px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong đó:<br /> - Ba tham số đầu mô tả sự dịch chuyển giữa hai hệ quy chiếu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ba tham số tiếp theo mô tả sự quay.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Tham số cuối cùng mô tả sự khác biệt về tỷ lệ.</span></span></span></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình này giả thiết rằng mối quan hệ giữa hai hệ quy chiếu có thể được biểu diễn bằng một phép biến đổi gồm ba tham số tịnh tiến, ba tham số quay và một tham số tỷ lệ.<br /> <br /> Trong các phần mềm RTK, người dùng có thể gặp nhiều tên gọi như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Seven Parameters</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Helmert Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bursa-Wolf Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Datum Transformation</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư hiện trường, điều quan trọng cần nhớ là: 7 tham số là một mô hình dùng để chuyển đổi giữa hai hệ quy chiếu.<br /> <br /> Trong những khu vực có biến dạng không đồng nhất, mô hình này có thể không đạt độ chính xác cao bằng các phương pháp sử dụng lưới hiệu chỉnh (Grid Shift).<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Bursa-Wolf và Helmert có giống nhau không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là điểm khá nhiều người nhầm lẫn. Trong nhiều phần mềm RTK, hai tên gọi: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Helmert Transformation & </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Bursa-Wolf Transformation </span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">được sử dụng gần như thay thế cho nhau. <br /> <br /> Tuy nhiên, xét dưới góc độ học thuật, Bursa-Wolf là một quy ước biểu diễn của phép biến đổi Helmert 7 tham số. Sự khác biệt chủ yếu nằm ở quy ước dấu và cách biểu diễn các tham số quay. Đối với phần lớn công việc RTK ngoài thực địa, sự khác biệt này thường không ảnh hưởng đến quá trình sử dụng nếu các tham số được khai báo đúng theo quy ước mà phần mềm yêu cầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Ngoài 7 tham số còn có những phương pháp nào?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi phép chuyển đổi tọa độ đều sử dụng mô hình 7 tham số. Một số phương pháp phổ biến khác gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Molodensky–Badekas</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp này cũng sử dụng bảy tham số nhưng thực hiện phép quay quanh một điểm gốc cục bộ (origin point) thay vì tâm Trái Đất. Cách tiếp cận này thường giúp giảm ảnh hưởng của sai số quay trong các hệ tọa độ địa phương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Grid Shift</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác với mô hình 7 tham số, Grid Shift không sử dụng một bộ tham số chung cho toàn bộ khu vực mà áp dụng các giá trị hiệu chỉnh được nội suy từ lưới.<br /> <br /> Ví dụ: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">NTv2, </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Geoid Grid</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với những khu vực có biến dạng không đồng đều, Grid Shift thường cho độ chính xác cao hơn mô hình 7 tham số.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. RTCM 1021–1027 là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM (Radio Technical Commission for Maritime Services) là tiêu chuẩn quốc tế dùng để truyền dữ liệu hiệu chỉnh trong GNSS RTK. <br /> <br /> Khi nhắc đến RTCM, nhiều người chỉ nghĩ đến các bản tin phục vụ quá trình FIX. Tuy nhiên, trong tiêu chuẩn RTCM 3.x còn có nhóm bản tin 1021–1027, được định nghĩa để truyền các thông tin liên quan đến phép biến đổi datum, phép chiếu bản đồ và một số mô hình hiệu chỉnh phục vụ chuyển đổi sang hệ tọa độ địa phương.<br /> <br /> Theo tài liệu của RTCM SC-104 và một số nhà sản xuất phần mềm GNSS, nhóm bản tin này được thiết kế nhằm hỗ trợ việc chuyển đổi từ hệ quy chiếu GNSS sang hệ tọa độ địa phương. <br /> <br /> Tuy nhiên cần lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi mạng CORS đều phát các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi bộ thu GNSS hoặc phần mềm RTK đều hỗ trợ đầy đủ việc giải mã và áp dụng các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc triển khai có thể khác nhau giữa các phiên bản RTCM, nhà sản xuất thiết bị và dịch vụ CORS.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì vậy, không nên mặc định rằng mọi hệ thống CORS đều truyền hoặc sử dụng RTCM 1021–1027.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1655118093874(1).jpg" style="width: 600px; height: 450px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Vì sao có phần mềm RTK không cần nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, người dùng không cần nhập thủ công, nhưng điều đó không có nghĩa quá trình chuyển đổi không tồn tại. <br /> <br /> Việc chuyển đổi có thể đã được thực hiện thông qua:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cơ sở dữ liệu CRS tích hợp trong phần mềm hoặc bộ điều khiển;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ffile hệ tọa độ (CRS/Projection) được import;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình do nhà sản xuất thiết lập;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin từ dịch vụ CORS;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc các cơ chế chuyển đổi riêng của phần mềm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Do đó, việc không phải nhập không đồng nghĩa với không sử dụng phép chuyển đổi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Khi nào vẫn phải nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số tình huống vẫn cần người dùng thiết lập thủ công, chẳng hạn:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng Base cục bộ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Llàm việc với hệ tọa độ công trình;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng hệ tọa độ địa phương chưa có trong phần mềm;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu khảo sát cũ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc làm việc với các dự án có quy định riêng về hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, người dùng có thể phải:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập 7 tham số;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Import file hệ tọa độ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc thực hiện Site Calibration (Localization).</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. RTCM 1021–1027 có thay thế Site Calibration không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Câu trả lời là không. Hai khái niệm này phục vụ những mục đích khác nhau.<br /> <br /> RTCM 1021–1027 là nhóm bản tin dùng để truyền các thông tin liên quan đến phép chuyển đổi hệ quy chiếu và phép chiếu bản đồ. Trong khi đó, Site Calibration (Localization) là quá trình thiết lập mối quan hệ giữa hệ tọa độ GNSS và hệ tọa độ của dự án thông qua các điểm khống chế ngoài thực địa.<br /> <br /> Site Calibration không thay thế phép chuyển đổi giữa các hệ quy chiếu mà chỉ hiệu chỉnh cục bộ để phù hợp với hệ tọa độ công trình. Ngay cả khi sử dụng mạng CORS và chọn đúng hệ tọa độ, nhiều dự án vẫn yêu cầu kiểm tra trên các mốc khống chế trước khi tiến hành đo chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Những lỗi thường gặp ngoài thực địa</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Qua thực tế sử dụng RTK, một số lỗi liên quan đến hệ tọa độ thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai datum hoặc realization.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai đơn vị của Rx, Ry, Rz (độ, giây hoặc radian).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai hệ số Scale (ppm hoặc hệ số tỷ lệ).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dùng nhầm hệ tọa độ công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tin tưởng trạng thái FIX nhưng không kiểm tra trên mốc khống chế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những nguyên nhân có thể khiến tọa độ sai hàng mét, thậm chí hàng chục mét dù máy vẫn báo FIX bình thường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">9. Người sử dụng RTK cần quan tâm đến điều gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với phần lớn công việc khảo sát, địa chính, thi công hoặc hoàn công, người dùng không nhất thiết phải nhớ chi tiết từng bản tin RTCM.<br /> <br /> Điều quan trọng hơn là:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo đúng Job / Project.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng mountpoint khi dùng CORS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập đúng chiều cao anten.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại trên mốc khống chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ nhìn trạng thái FIX mà bỏ qua cấu hình hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu kết quả đo lệch toàn bộ so với bản vẽ hoặc mốc ngoài thực địa, cần kiểm tra lại hệ tọa độ trước khi nghi ngờ máy RTK hoặc tín hiệu vệ tinh.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> RTCM 1021–1027, Helmert, Bursa-Wolf, 7 tham số và Site Calibration đều liên quan đến quá trình đưa kết quả GNSS về hệ tọa độ làm việc, nhưng chúng không phải là các khái niệm tương đương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS xác định vị trí trong hệ quy chiếu toàn cầu, thường là WGS84 hoặc các realization gần với ITRF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">VN-2000 và hệ tọa độ công trình là các hệ tọa độ làm việc được sử dụng trong khảo sát, thiết kế và thi công tại Việt Nam.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7 tham số (Bursa-Wolf/Helmert) là một trong những mô hình phổ biến dùng để chuyển đổi tọa độ giữa các hệ quy chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM 1021–1027 là nhóm bản tin được thiết kế để hỗ trợ truyền thông tin liên quan đến phép biến đổi tọa độ và phép chiếu bản đồ. Tuy nhiên, việc các bản tin này có được sử dụng hay không còn phụ thuộc vào phiên bản RTCM, hệ thống CORS và phần mềm RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Site Calibration (Localization) là quá trình hiệu chỉnh cục bộ theo các điểm khống chế của dự án và không nên xem là sự thay thế cho các phép biến đổi giữa các hệ quy chiếu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư khảo sát và thi công, hiểu đúng vai trò của từng khái niệm sẽ giúp cấu hình RTK chính xác hơn, xử lý tốt các tình huống liên quan đến hệ tọa độ và hạn chế các sai lệch không đáng có ngoài thực địa.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 230626 2.png" style="width: 800px; height: 533px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;"><u><strong>Tài liệu tham khảo</strong></u></span></span><br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">RTCM Special Committee 104 – <em>RTCM Standard for Differential GNSS (Multiple Signal Messages)</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IOGP – <em>Geomatics Guidance Note 7, Coordinate Conversions and Transformations</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">EPSG Geodetic Parameter Dataset & Guidance Note 7-2.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">ISO 19111 – <em>Geographic Information — Referencing by Coordinates</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Carlson Software – <em>RTCM 1021–1027 White Paper</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Leica Geosystems – <em>Captivate Coordinate System Guide</em>.</span></span></li> </ul> ', 'images' => '20260625150050d64d8db365e7a0f663896871ecf242ce.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'RTK chuyển từ WGS84 sang VN-2000 như thế nào? Giải thích RTCM 1021–1027 và 7 tham số', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách RTK chuyển đổi từ WGS84 sang VN-2000, bản chất của RTCM 1021–1027, Bursa-Wolf Transformation, Helmert 7 tham số và vai trò của Site Calibration trong GNSS RTK.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '752', 'slug' => 'hieu-dung-ve-rtcm-1021-1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '555', 'rght' => '556', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '821', 'name' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân phổ biến và cách khắc phục!', 'code' => null, 'alias' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Với khả năng xác định tọa độ ở độ chính xác mức centimet, RTK đã trở thành công cụ gần như không thể thiếu đối với nhiều kỹ sư. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Trong điều kiện làm việc phù hợp và khi đạt trạng thái FIX, công nghệ RTK có thể cung cấp tọa độ với độ chính xác ở mức centimet. Chính vì vậy, RTK đã trở thành một trong những công cụ quan trọng đối với nhiều kỹ sư khảo sát và xây dựng. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy GPS RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.<br /> </em><br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>I. Trạng thái FIX trong RTK là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công nghệ GNSS RTK, trạng thái FIX (Fixed Solution) là khi bộ thu đã giải được số nguyên chu kỳ sóng mang (<em>Integer Ambiguity</em>). Khi đó, hệ thống có thể xác định tọa độ với độ chính xác ở mức centimet trong điều kiện làm việc phù hợp.<br /> <br /> Thông thường, máy RTK sẽ hiển thị một trong các trạng thái sau:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Single: Định vị độc lập bằng tín hiệu vệ tinh, sai số thường ở mức vài mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DGPS/SBAS: Có dữ liệu hiệu chỉnh, độ chính xác được cải thiện so với Single nhưng chưa đạt mức RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Float: Đã nhận dữ liệu cải chính nhưng chưa giải được hoàn toàn số nguyên chu kỳ sóng mang.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX: Định vị RTK với độ chính xác cao, đáp ứng phần lớn yêu cầu của công tác trắc địa.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lưu ý rằng, trạng thái FIX không đồng nghĩa với việc kết quả luôn chính xác tuyệt đối. Độ tin cậy của phép đo còn phụ thuộc vào điều kiện quan sát vệ tinh, môi trường làm việc, cấu hình hệ tọa độ và việc kiểm tra chất lượng số liệu ngoài thực địa.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 3 FIX.png" style="width: 620px; height: 566px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Không đủ vệ tinh hoặc hình học vệ tinh không thuận lợi</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để đạt được nghiệm FIX, máy RTK cần quan sát đồng thời đủ số lượng vệ tinh với sự phân bố hợp lý trên bầu trời. Máy có thể khó FIX hoặc FIX chậm khi làm việc trong các môi trường như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần nhà cao tầng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hẻm sâu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khu vực có nhiều cây lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dưới mái che hoặc trong nhà xưởng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa hình núi đá che khuất bầu trời.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài số lượng vệ tinh, chỉ số PDOP (Position Dilution of Precision) cũng ảnh hưởng đáng kể đến khả năng FIX. Dù quan sát được nhiều vệ tinh, nếu hình học vệ tinh không thuận lợi thì thời gian FIX vẫn có thể kéo dài hoặc nghiệm FIX kém ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 2 FIX.png" style="width: 600px; height: 400px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hiện tượng đa đường tín hiệu (Multipath)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đa đường tín hiệu là một trong những nguyên nhân phổ biến khiến máy RTK khó giữ FIX. Hiện tượng này xảy ra khi tín hiệu GNSS bị phản xạ qua các bề mặt như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tường kính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhà thép tiền chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xe ô tô hoặc container.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặt nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hàng rào thép.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi bộ thu nhận đồng thời tín hiệu trực tiếp và tín hiệu phản xạ, việc xác định pha sóng mang trở nên khó khăn hơn, khiến nghiệm RTK thiếu ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 5 FIX.png" style="width: 620px; height: 348px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Khoảng cách giữa Base và Rover quá lớn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong hệ thống RTK Base – Rover truyền thống, khoảng cách giữa hai máy ảnh hưởng trực tiếp đến chất lượng dữ liệu cải chính. Trong điều kiện các yếu tố khác tương đương, khoảng cách giữa Base và Rover càng lớn thì việc giải nghiệm RTK thường càng khó khăn hơn.<br /> <br /> Khi khoảng cách tăng lên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số tầng điện ly và tầng đối lưu giữa hai điểm tăng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mức độ tương quan của tín hiệu giảm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian FIX có thể lâu hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giữ FIX giảm trong điều kiện khó.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK Network sử dụng CORS (VRS, iMAX hoặc Single Base), người dùng thường không làm việc với một trạm Base duy nhất. Khả năng FIX còn phụ thuộc vào mật độ mạng CORS, thuật toán xử lý của hệ thống và điều kiện quan sát vệ tinh.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 4 FIX.png" style="width: 620px; height: 410px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Kết nối Internet hoặc dữ liệu cải chính không ổn định</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi sử dụng RTK Network thông qua NTRIP, dữ liệu RTCM phải được truyền liên tục từ máy chủ CORS đến Rover. Một số nguyên nhân thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sóng 4G/5G yếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Wi-Fi không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Server CORS bị gián đoạn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Age of Differential tăng cao.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, dữ liệu cải chính có thể bị trễ hoặc gián đoạn. Tùy từng hãng và từng dòng máy, một số thiết bị có thể duy trì nghiệm FIX trong thời gian ngắn nhờ các tính năng như RTK Hold, RTK Keep hoặc các cơ chế tương tự. Tuy nhiên, nếu việc gián đoạn kéo dài, máy thường sẽ chuyển sang FLOAT hoặc SINGLE.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Nhiễu điện từ và nhiễu vô tuyến</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS từ vệ tinh có công suất rất nhỏ khi đến mặt đất nên dễ bị ảnh hưởng bởi các nguồn nhiễu mạnh. Một số nguồn nhiễu thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạm BTS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radar.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường dây điện cao thế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy phát sóng công suất lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống radio công nghiệp.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK sử dụng Radio UHF, nhiễu vô tuyến còn có thể làm giảm chất lượng liên lạc giữa Base và Rover.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 6 FIX.png" style="width: 620px; height: 411px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Anten GNSS bị che khuất hoặc lắp đặt chưa phù hợp</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng thu tín hiệu của máy RTK phụ thuộc rất nhiều vào vị trí đặt anten. Một số tình huống có thể làm giảm chất lượng tín hiệu gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đứng quá sát tường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt gần xe ô tô.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần mái tôn hoặc kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten bị che bởi người đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cáp hoặc anten bị hư hỏng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lựa chọn vị trí đặt máy thông thoáng luôn là một trong những giải pháp đơn giản nhưng mang lại hiệu quả cao.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Điều kiện khí quyển và hoạt động không gian</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS chịu ảnh hưởng của tầng điện ly và tầng đối lưu. Trong các thời điểm như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bão từ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Kp cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động điện ly mạnh.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">khả năng FIX có thể giảm so với điều kiện bình thường. Trong đa số trường hợp, mưa nhỏ không phải là nguyên nhân chính gây mất FIX.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 1 FIX.png" style="width: 620px; height: 413px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Firmware hoặc cấu hình máy chưa phù hợp<br /> </span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các bản cập nhật firmware mới có thể:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cải thiện thuật toán RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thêm tín hiệu GNSS mới.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khắc phục các lỗi đã được nhà sản xuất ghi nhận.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng khả năng tương thích với các chuẩn RTCM.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, một số cấu hình chưa phù hợp cũng có thể ảnh hưởng đến khả năng FIX, chẳng hạn như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ bật một số hệ vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập góc cắt vệ tinh chưa hợp lý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai thông số truyền Radio giữa Base và Rover.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Người dùng nên cập nhật firmware theo khuyến nghị của nhà sản xuất và kiểm tra lại cấu hình trước khi làm việc ngoài hiện trường.</span></span><br /> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">9. Hiệu năng của từng dòng máy RTK</span></h3> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Không phải mọi bộ thu GNSS RTK đều có khả năng làm việc giống nhau. Hiệu năng của thiết bị phụ thuộc vào nhiều yếu tố như:</span></span><br /> <br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thiết kế anten GNSS.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Chip xử lý tín hiệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thuật toán RTK.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Khả năng chống đa đường.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Tốc độ xử lý dữ liệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Mức độ tối ưu của phần mềm điều khiển.</span></span></li> </ul> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Vì vậy, ngay cả khi làm việc trong cùng điều kiện hiện trường, tốc độ FIX và khả năng giữ FIX giữa các dòng máy cũng có thể khác nhau.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10. Máy vẫn FIX nhưng tọa độ bị sai</span></span></h3> <h3> </h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi thường bị nhầm với hiện tượng "không FIX". Trong nhiều trường hợp, máy vẫn báo FIX bình thường nhưng tọa độ sai đáng kể do:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai tham số chuyển đổi.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp tình huống này, cần kiểm tra lại cấu hình hệ quy chiếu trước khi nghi ngờ chất lượng tín hiệu GNSS.</span></span><br /> <p style="text-align: center;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/Esurvey.jpg" style="width: 620px; height: 324px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Làm thế nào để cải thiện khả năng FIX?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để nâng cao khả năng FIX khi đo RTK, người dùng nên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đo thông thoáng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế làm việc gần các bề mặt phản xạ mạnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra số lượng vệ tinh và chỉ số PDOP.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo kết nối Internet hoặc Radio ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi chỉ số Age of Differential.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra đúng cấu hình hệ tọa độ trước khi đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cập nhật firmware theo khuyến nghị của nhà sản xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra định kỳ anten và phụ kiện.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm trên các điểm khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ dựa vào trạng thái FIX, nên kiểm tra trên mốc khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác. <br /> <br /> >>> Máy GPS RTK không phải lúc nào cũng đạt trạng thái FIX ngay sau khi khởi động. Khả năng FIX phụ thuộc vào nhiều yếu tố như điều kiện quan sát vệ tinh, hiện tượng đa đường, chất lượng dữ liệu cải chính, kết nối Internet hoặc Radio, điều kiện khí quyển, cấu hình thiết bị và môi trường làm việc.<br /> <br /> Trong thực tế, trạng thái FIX là điều kiện cần nhưng chưa phải điều kiện đủ để khẳng định chất lượng kết quả đo. Bên cạnh việc theo dõi trạng thái FIX, người sử dụng vẫn nên kết hợp kiểm tra trên mốc khống chế, đo lặp các điểm quan trọng và đánh giá điều kiện hiện trường nhằm đảm bảo độ tin cậy của số liệu.<br /> <br /> Hiểu rõ các nguyên nhân trên sẽ giúp kỹ sư trắc địa xử lý nhanh các tình huống ngoài thực địa, lựa chọn phương án đo phù hợp và khai thác hiệu quả hơn công nghệ GNSS RTK.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/TRẮC ĐỊA THÀNH ĐẠT (Logo) (Ảnh bìa Facebook).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 300px;" /></p> <br /> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ ngay </span><a href="https://zalo.me/0949322456" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><span style="margin: 0px; padding: 0px; color: rgb(255, 102, 0);"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt qua Zalo</strong></span></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để được tư vấn chọn máy phù hợp nhất!</span>', 'images' => '20260625110358e00121db9ef2b0248aadce5ad04f0e9d.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân và cách khắc phục', 'meta_key' => '', 'meta_des' => 'Máy GPS RTK không FIX được hoặc thường xuyên chuyển giữa FIX và FLOAT? Tìm hiểu 10 nguyên nhân phổ biến như vệ tinh, CORS, Internet, Base, nhiễu tín hiệu và cách khắc phục hiệu quả.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '537', 'slug' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '553', 'rght' => '554', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '820', 'name' => 'AI trong ngành trắc địa: Công việc nào sẽ được tự động hóa trước?', 'code' => null, 'alias' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span><o:p></o:p></p> <p data-end="686" data-start="526"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang dần xuất hiện trong nhiều công đoạn của quy trình khảo sát và thành lập bản đồ.</span></span><o:p></o:p></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span></em><br /> <br /> <o:p></o:p></p> <p data-end="686" data-start="526"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, phân loại dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang giúp giảm đáng kể thời gian xử lý dữ liệu và hỗ trợ kỹ sư đưa ra quyết định nhanh hơn. Tuy nhiên, một câu hỏi được nhiều người quan tâm là: </span></span></em><em style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Công việc nào trong ngành trắc địa sẽ được AI tự động hóa trước?</strong></em></p> <p style="text-align: center;"> </p> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and BIM 2.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 450px; height: 299px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong quá trình khảo sát và thành lập bản đồ, khối lượng dữ liệu thu thập được ngày càng lớn. Một chuyến bay UAV có thể tạo ra hàng nghìn ảnh chụp.<br /> <br /> Một dự án LiDAR có thể tạo ra hàng triệu đến hàng tỷ điểm Point Cloud. <br /> <br /> Các hệ thống quan trắc hiện đại có thể ghi nhận dữ liệu liên tục 24/7.<br /> <br /> Khối lượng dữ liệu này vượt xa khả năng xử lý thủ công của con người. Đây chính là môi trường lý tưởng để AI phát huy hiệu quả. Theo nhiều nghiên cứu gần đây, AI đặc biệt phù hợp với các nhiệm vụ nhận dạng mẫu, phân loại dữ liệu, phát hiện bất thường và tự động hóa các quy trình xử lý lặp lại.</span></span><br /> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">A. AI đang được ứng dụng như thế nào trong trắc địa?</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Xử lý dữ liệu UAV và ảnh viễn thám</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lĩnh vực phát triển nhanh nhất hiện nay. AI có thể hỗ trợ:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng nhà cửa, đường giao thông và cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động phân loại lớp phủ bề mặt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện thay đổi địa hình qua nhiều thời điểm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thành lập bản đồ hiện trạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều nghiên cứu đã chứng minh AI có khả năng tự động nhận dạng và trích xuất đối tượng từ ảnh UAV với độ chính xác cao, giúp giảm đáng kể khối lượng công việc số hóa thủ công.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and UAV.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Xử lý Point Cloud và LiDAR</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong các dự án quét laser mặt đất hoặc UAV LiDAR, việc phân loại Point Cloud thường tiêu tốn rất nhiều thời gian.<br /> AI hiện có thể:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tách điểm mặt đất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng công trình xây dựng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo mô hình 3D bán tự động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số hệ thống hiện nay còn có khả năng xử lý dữ liệu LiDAR gần như theo thời gian thực và tự động phân loại địa vật với mức can thiệp thủ công rất thấp.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and Lidar.jpg" style="width: 500px; height: 333px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Thành lập và cập nhật bản đồ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong lĩnh vực GIS và bản đồ, AI đang được ứng dụng để:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động số hóa đối tượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất ranh giới địa vật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lỗi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện các bất thường về hình học và thuộc tính.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các nghiên cứu về bản đồ địa chính và bản đồ nền cho thấy AI có tiềm năng rút ngắn đáng kể thời gian thành lập và cập nhật dữ liệu bản đồ.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and Mapping(1).jpg" style="width: 600px; height: 300px;" /></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Quan trắc công trình và giám sát biến dạng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các công trình cầu, đập, nhà cao tầng hoặc mỏ khai thác, dữ liệu quan trắc thường được thu thập liên tục trong thời gian dài AI có thể giúp:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện số liệu bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi xu hướng chuyển vị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự báo nguy cơ lún hoặc nghiêng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ cảnh báo sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây được xem là một trong những hướng ứng dụng có tiềm năng lớn vì AI rất giỏi trong việc phát hiện các quy luật ẩn trong tập dữ liệu dài hạn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and monitoring.jpg" style="width: 600px; height: 335px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Công việc văn phòng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu phải lựa chọn một nhóm công việc có khả năng được AI tự động hóa trước trong ngành trắc địa, thì đó có lẽ là các công việc văn phòng mang tính lặp lại và xử lý dữ liệu. Các công việc như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu giữa các định dạng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tổng hợp số liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra các lỗi dữ liệu đơn giản.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu, bảng biểu và báo cáo kỹ thuật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất thông tin từ nhật ký hoặc sổ đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại và sắp xếp dữ liệu dự án.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những công việc có quy trình tương đối rõ ràng và ít phụ thuộc vào đánh giá chuyên môn của kỹ sư. Trên thực tế, nhiều phần mềm hiện nay đã bắt đầu tích hợp các tính năng tự động hóa dạng này. AI chỉ đang giúp các quy trình đó trở nên thông minh và hiệu quả hơn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ai and office.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">B. Công việc nào khó bị AI thay thế?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực tế hiện nay, đây có lẽ là nhóm ứng dụng AI gần gũi nhất với nhiều kỹ sư trắc địa. Thay vì mất hàng giờ để viết các công cụ Excel, Python hoặc VBA, nhiều kỹ sư đã bắt đầu sử dụng AI để hỗ trợ:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Viết chương trình chuyển đổi tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán stakeout tim tuyến, cọc khoan nhồi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra dữ liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển ảnh sổ đo thành bảng tính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu nghiệm thu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Soạn thảo báo cáo kỹ thuật.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AI không thực hiện thay công việc chuyên môn, nhưng có thể giúp rút ngắn đáng kể thời gian xử lý các công việc lặp lại.<br /> <br /> >>> Nếu GNSS giúp người làm trắc địa đo nhanh hơn, UAV giúp thu thập dữ liệu nhanh hơn thì AI có thể giúp xử lý dữ liệu nhanh hơn.</span></span> <p data-end="2115" data-start="1963"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong tương lai gần, lợi thế có thể không nằm ở việc ai sử dụng AI hay không, mà nằm ở việc ai biết khai thác AI hiệu quả hơn trong công việc hàng ngày. </span></span><br /> <br /> <strong><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="text-align: justify; margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span></strong></p> ', 'images' => '20260617172058d2979529aed88d220bef4d1f33c5f441.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'AI trong trắc địa: Công việc nào sẽ được tự động hóa trước?', 'meta_key' => '', 'meta_des' => 'AI đang được ứng dụng ngày càng nhiều trong ngành trắc địa, từ xử lý UAV, LiDAR, bản đồ đến lập báo cáo kỹ thuật. Vậy công việc nào sẽ được AI tự động hóa trước? Tìm hiểu trong bài viết này.', 'created' => '2026-06-17', 'modified' => '2026-07-11', 'status' => '1', 'view' => '670', 'slug' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '551', 'rght' => '552', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '819', 'name' => 'BIM và LiDAR đang dùng những định dạng dữ liệu nào? Giải thích IFC, RVT, NWD, LAS, LAZ từ A-Z', 'code' => null, 'alias' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.</span></span><br /> ', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.<br /> <br /> Vậy các định dạng này dùng để làm gì và khác nhau như thế nào?</em></span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Nhóm dữ liệu BIM</span></span></h2> <br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 IFC (Industry Foundation Classes)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC là định dạng trao đổi dữ liệu BIM mở được phát triển bởi buildingSMART. Mục đích chính của IFC là cho phép các phần mềm BIM khác nhau trao đổi mô hình với nhau mà không phụ thuộc vào một hãng phần mềm cụ thể.</span></span><br /> <br /> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>- Ưu điểm:</strong> Không phụ thuộc vào một nhà cung cấp phần mềm cụ thể, hỗ trợ phối hợp giữa nhiều bộ môn và phù hợp cho việc bàn giao, lưu trữ dữ liệu dự án trong thời gian dài.</span></span><br /> <br /> <o:p></o:p></p> <p data-end="608" data-start="295"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="307" data-start="295">- Hạn chế:</strong> Không phải phần mềm BIM nào cũng hỗ trợ đầy đủ mọi tính năng của IFC. Trong một số trường hợp, các tham số đối tượng, Family phức tạp hoặc dữ liệu chuyên biệt có thể bị mất hoặc thay đổi khi chuyển đổi. Ngoài ra, khả năng tương thích còn phụ thuộc vào phiên bản IFC sử dụng (IFC2x3, IFC4, IFC4.3...).</span></span><br /> <br /> <o:p></o:p></p> <p data-end="858" data-start="613"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="634" data-start="613">- Ứng dụng thực tế:</strong> IFC thường được sử dụng để trao đổi dữ liệu giữa các bộ môn, bàn giao mô hình BIM cho chủ đầu tư và lưu trữ dữ liệu dự án theo định dạng mở (vendor-neutral), giúp giảm sự phụ thuộc vào một phần mềm hoặc nhà cung cấp cụ thể.</span></span><o:p></o:p></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Autodesk Revit, Tekla Structures, Archicad, Bentley OpenBuildings đều có thể xuất hoặc nhập file IFC nên IFC thường được xem là "ngôn ngữ chung" của BIM.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 BCF (BIM Collaboration Format)</span></span></h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">BCF được sử dụng để trao đổi các vấn đề (Issue), bình luận (Comment), góc nhìn (Viewpoint) và vị trí cần xử lý trong mô hình BIM. BCF không chứa mô hình 3D mà chỉ lưu thông tin phục vụ quá trình phối hợp giữa các bên.</span> <p> <br /> <strong data-end="337" data-start="325" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Dung lượng nhỏ, dễ chia sẻ và tích hợp với nhiều nền tảng BIM như Autodesk Construction Cloud (BIM 360), Solibri, Tekla BIMsight và các hệ thống quản lý Issue khác. BCF đặc biệt hữu ích trong các cuộc họp phối hợp (Coordination Meeting), kiểm tra va chạm (Clash Detection) và quy trình QA/QC.</span></p> <p data-end="630" data-start="325"> <br /> <strong data-end="653" data-start="635" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Lưu ý thực tế:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> BCF thường được sử dụng kèm với các file mô hình như IFC, RVT hoặc NWD để người dùng có thể xem đầy đủ bối cảnh của vấn đề. Một ưu điểm quan trọng của BCF là khả năng theo dõi lịch sử xử lý (Traceability), giúp liên kết giữa vấn đề được phát hiện, người phụ trách và các thay đổi được thực hiện trong dự án.</span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 RVT</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RVT là định dạng dự án của Autodesk Revit. Một file RVT có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiến trúc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống MEP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số vật liệu</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng BIM được sử dụng rất phổ biến hiện nay.</span></span><br /> <br /> <p data-end="355" data-start="108"> <strong data-end="372" data-start="360" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Lưu giữ đầy đủ tham số đối tượng, lịch sử làm việc, Worksharing và các thông tin thiết kế chi tiết. RVT là định dạng mang lại khả năng làm việc đầy đủ nhất trong môi trường Revit.</span></p> <p data-end="552" data-start="360"> </p> <p data-end="808" data-start="557"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="569" data-start="557">Hạn chế:</strong> RVT là định dạng độc quyền (proprietary) của Autodesk. Các phần mềm BIM khác thường không thể đọc hoặc khai thác đầy đủ toàn bộ thông tin trong file RVT. Vì vậy, khi cần phối hợp đa nền tảng, người dùng thường phải xuất sang IFC hoặc NWD.</span></span><br /> </p> <p data-end="1161" data-start="813"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="831" data-start="813">Lưu ý thực tế:</strong> RVT thường được sử dụng trong nội bộ đơn vị thiết kế hoặc giữa các bên cùng sử dụng Revit. Khi cần trao đổi dữ liệu với chủ đầu tư, nhà thầu hoặc các đơn vị sử dụng phần mềm khác, IFC thường là lựa chọn phổ biến để bàn giao mô hình BIM, trong khi NWD thường được sử dụng cho công tác phối hợp và kiểm tra mô hình trên Navisworks.</span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 RFA</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA là định dạng Family của Revit. Family có thể hiểu là thư viện các đối tượng BIM như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa sổ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị điện</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị cơ điện</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA tương tự như Block trong AutoCAD nhưng có nhiều thông tin tham số hơn.<br /> <br /> <strong>Ưu điểm</strong>: RFA cho phép mô tả đối tượng bằng các tham số chi tiết như kích thước, vật liệu, mã thiết bị và thông tin kỹ thuật. Nhờ đó, các đối tượng có thể dễ dàng tái sử dụng giữa nhiều dự án khác nhau, đồng thời giúp chuẩn hóa dữ liệu BIM trong doanh nghiệp.<br /> <br /> <strong>Hạn chế</strong>: RFA là định dạng riêng của Revit nên chủ yếu hoạt động trong hệ sinh thái Autodesk. Khi xuất sang IFC, các Family phức tạp có thể bị đơn giản hóa hoặc mất một phần tham số do sự khác biệt giữa các chuẩn dữ liệu BIM.<br /> <br /> <strong>Lưu ý</strong>: Nên tiêu chuẩn hóa thư viện Family trước khi triển khai dự án hoặc bàn giao dữ liệu. Đối với các Family quan trọng, cần quản lý phiên bản (Version Control) và tài liệu hóa các tham số chính để đảm bảo tính nhất quán giữa các bộ môn và các giai đoạn của dự án.</span></span><br /> <br /> <h3> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.5 RTE</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTE là định dạng Template của Revit. Đây là file mẫu được sử dụng khi khởi tạo dự án mới nhằm đảm bảo tiêu chuẩn hóa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Family</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy ước đặt tên</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số dự án</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/BIM 2(1).jpg" style="width: 662px; height: 463px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Nhóm dữ liệu Navisworks</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 NWD</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD là định dạng mô hình tổng hợp của Autodesk Navisworks. File NWD có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều mô hình BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Clash Detection</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Markup</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu phối hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng thường được sử dụng trong các cuộc họp BIM hoặc bàn giao mô hình.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 NWC</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWC là định dạng trung gian của Navisworks. File NWC thường nhẹ hơn NWD và được sử dụng để tăng tốc quá trình nạp mô hình.<br /> Nhiều dự án BIM sử dụng NWC làm định dạng trao đổi nội bộ giữa các bộ môn.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.3 NWV</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWV là định dạng Viewpoint của Navisworks. Nó lưu các thông tin về:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái hiển thị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thiết lập quan sát mô hình</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với NWD hoặc NWC, NWV ít được sử dụng hơn.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Navisworks.jpg" style="width: 680px; height: 392px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Nhóm dữ liệu Point Cloud</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 LAS (LASer File Format)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS là định dạng tiêu chuẩn lưu trữ dữ liệu Point Cloud từ công nghệ LiDAR. Mỗi điểm trong file LAS có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Intensity</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GPS Time</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Classification</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Màu RGB</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS thường được tạo ra từ: UAV LiDAR; Mobile Mapping; SLAM Scanner; Máy quét laser mặt đất (TLS); LiDAR hàng không. Một file LAS có thể chứa từ hàng triệu đến hàng trăm triệu điểm.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 LAZ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAZ là phiên bản nén của LAS. Tương tự như DXF, DWG; ZIP và thư mục dữ liệu. <br /> <br /> LAZ giúp giảm đáng kể dung lượng lưu trữ nhưng vẫn giữ nguyên thông tin Point Cloud. Hiện nay phần lớn các dự án LiDAR đều sử dụng LAZ để tối ưu dung lượng và tốc độ truyền dữ liệu.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lidar format.jpg" style="width: 565px; height: 353px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. So sánh nhanh các nhóm dữ liệu</span></span></h2> <br /> <table border="1" cellpadding="0" cellspacing="3" style="width: 100%"> <tbody> <tr> <td style="width: 128px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nhóm dữ liệu</strong></span></span></td> <td style="width: 160px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Định dạng phổ biến</strong></span></span></td> <td style="width: 212px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Mục đích</strong></span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ điểm</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý điểm đo, stakeout</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CAD</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF, DWG</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Bản vẽ kỹ thuật 2D/3D</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">BIM</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC, RVT, RFA, RTE, BCF</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình công trình số</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Navisworks</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD, NWC, NWV</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Phối hợp và kiểm tra mô hình</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Cloud</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS, LAZ</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu quét laser và LiDAR</span></span></td> </tr> </tbody> </table> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Sự phát triển của BIM, UAV LiDAR và công nghệ quét laser 3D đang làm thay đổi cách dữ liệu được tạo ra và sử dụng trong ngành xây dựng.<br /> <br /> Nếu CSV và DXF vẫn là những định dạng quen thuộc đối với kỹ sư đo đạc thì IFC, RVT, NWD hay LAS đang trở thành những định dạng ngày càng phổ biến trong các dự án hiện đại.<br /> <br /> Việc hiểu được chức năng của từng loại dữ liệu sẽ giúp kỹ sư lựa chọn đúng định dạng, trao đổi thông tin hiệu quả hơn và tránh nhiều sai sót trong quá trình triển khai dự án.</span></span><br /> <br /> <h2 data-end="2546" data-start="2275" id="lien-he-trac-dia-thanh-dat-de-duoc-tu-van-giai-phap-phu-hop-voi-tung-loai-cong-trinh" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span><br /> <br /> <span style="display: none;"> </span><span style="display: none;"> </span><img alt="" src="/admin/webroot/upload/image/images/bim 5.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; color: rgb(34, 34, 34); width: 678px; height: 452px;" /><span style="display: none;"> </span><span style="display: none;"> </span></h2> <p> </p> ', 'images' => '2026061315274748a34b386d28d2887f07eb97a60c9540.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Ngoài CSV và DXF: Tìm hiểu các định dạng IFC, RVT, NWD, LAS trong BIM và quét laser 3D', 'meta_key' => '', 'meta_des' => 'iFC, RVT, NWD, LAS, LAZ là gì? Tìm hiểu các định dạng dữ liệu BIM, Navisworks và Point Cloud phổ biến trong xây dựng, đo đạc, UAV LiDAR và quét laser 3D.', 'created' => '2026-06-13', 'modified' => '2026-07-12', 'status' => '1', 'view' => '810', 'slug' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '549', 'rght' => '550', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '818', 'name' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'code' => null, 'alias' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></p> <p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></em></p> <p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></em></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Từ cuộc đua vệ tinh đến cuộc đua trải nghiệm ngoài thực địa</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng 10 năm trước, khi một hãng giới thiệu thế hệ máy GNSS RTK mới, những thông số thường được nhắc đến nhiều nhất là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi được bao nhiêu kênh vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ những hệ thống GNSS nào.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX nhanh hơn bao nhiêu giây.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao hơn bao nhiêu milimet.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời điểm đó, đây thực sự là những yếu tố tạo nên sự khác biệt giữa các sản phẩm trên thị trường. Các hãng liên tục nâng số lượng kênh từ vài trăm lên hàng nghìn kênh. Những hệ thống mới như Galileo, BeiDou hay QZSS lần lượt được bổ sung. Công nghệ xử lý tín hiệu cũng ngày càng hoàn thiện.<br /> <br /> Tuy nhiên, khi nhìn vào thị trường hiện nay, có thể thấy cuộc đua đó đang dần thay đổi. Hầu hết các dòng RTK hiện đại đều đã hỗ trợ đa hệ vệ tinh, đa tần số và có khả năng đạt độ chính xác centimet trong điều kiện làm việc bình thường. Khi khoảng cách công nghệ về phần cứng GNSS ngày càng thu hẹp, các hãng bắt đầu tìm kiếm một hướng đi mới - Đó là nâng cao trải nghiệm làm việc ngoài thực địa.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Điều mà kỹ sư đo đạc thực sự quan tâm là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với người sử dụng máy RTK ngoài công trường, câu hỏi quan trọng nhất thường không phải: "Máy này theo dõi được bao nhiêu vệ tinh?" mà là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi hoàn thành công việc nhanh hơn không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi đo được những vị trí khó không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm được thời gian đi lại ngoài hiện trường không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm số lượng thiết bị phải mang theo không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp công việc an toàn hơn không?</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây chính là lý do nhiều công nghệ mới xuất hiện trong vài năm gần đây.<br /> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. IMU – Bước thay đổi đầu tiên</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một trong những cải tiến có ảnh hưởng lớn nhất là công nghệ IMU. Trước đây, việc giữ sào GNSS thẳng đứng gần như là yêu cầu bắt buộc.<br /> Những vị trí như: chân tường, góc công trình, mép hàng rào hay khu vực cây cối thường gây khó khăn cho người đo. Nhưng IMU đã thay đổi hoàn toàn cách làm việc này. Người sử dụng có thể nghiêng sào trong một phạm vi nhất định mà vẫn duy trì được độ chính xác cao.<br /> <br /> Ngày nay, bù nghiêng gần như đã trở thành tính năng tiêu chuẩn trên các dòng RTK mới.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (1).png" style="width: 680px; height: 383px;" /></span></span></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Camera – Khi RTK bắt đầu "nhìn thấy" hiện trường</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau IMU, các hãng tiếp tục đưa camera lên Rover GNSS. Ban đầu, nhiều người cho rằng đây chỉ là một tính năng mang tính trình diễn công nghệ.<br /> Tuy nhiên, thực tế camera đã mở ra nhiều ứng dụng mới:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhận hiện trạng công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo điểm từ ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout bằng thực tế tăng cường (AR).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại dữ liệu sau khi khảo sát.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này giúp RTK không chỉ cung cấp tọa độ mà còn lưu giữ được bối cảnh thực tế của hiện trường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (2).png" style="width: 680px; height: 678px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Laser Survey – Xu hướng đáng chú ý nhất hiện nay</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu IMU giúp người dùng đo nghiêng và camera giúp ghi nhận hình ảnh, thì Laser Survey đang hướng tới một mục tiêu khác. Đó là đo được những vị trí mà trước đây Rover GNSS khó hoặc không thể tiếp cận.<br /> Hãy hình dung một số tình huống quen thuộc mà anh em có thể gặp khi trực tiếp đo ngoài công trình: <br /> - Mép taluy cao.<br /> - Hồ điều hòa.<br /> - Bờ kênh.<br /> - Hố đào sâu.<br /> - Mái nhà.<br /> - Tường chắn.<br /> - Khu vực đang thi công nguy hiểm.<br /> <br /> Với RTK truyền thống, muốn lấy tọa độ chính xác, người đo thường phải đưa sào đến tận vị trí cần đo. Điều này không phải lúc nào cũng thuận lợi hoặc an toàn. Laser Survey ra đời để giải quyết vấn đề đó. Thay vì đưa anten GNSS đến điểm đo, người sử dụng chỉ cần hướng tia laser đến mục tiêu. Phần mềm sẽ kết hợp dữ liệu từ GNSS, IMU và laser để tính toán tọa độ của điểm cần khảo sát.</span></span><br /> <p data-end="1209" data-start="1006"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tất nhiên, việc đo các vị trí khó tiếp cận bằng tia laser không phải là điều hoàn toàn mới trong ngành đo đạc. Máy toàn đạc điện tử đã sử dụng công nghệ đo không gương (Reflectorless) từ nhiều năm trước. Điểm khác biệt là Laser Survey đang đưa khả năng này lên nền tảng Rover GNSS, cho phép người dùng vừa khai thác ưu thế định vị vệ tinh ngoài hiện trường, vừa thực hiện các phép đo từ xa trong những tình huống mà trước đây thường phải kết hợp thêm máy toàn đạc hoặc các thiết bị khác.</span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lý do nhiều chuyên gia nhận định rằng Laser Survey có thể là một trong những bước phát triển đáng chú ý nhất của Rover GNSS trong những năm gần đây.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/i85-gnss-imu-dual-cameras-laser-land-surveying.jpg" style="width: 472px; height: 354px;" /></span></span></p> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>6. Vì sao các hãng TQ đầu tư mạnh vào hướng đi này?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một lý do quan trọng là thị trường đã thay đổi. Trước đây, người mua thường so sánh:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu kênh vệ tinh?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu tần số?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác bao nhiêu milimet?</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngày nay, người dùng bắt đầu quan tâm nhiều hơn đến các yếu tố như:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Năng suất làm việc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trải nghiệm sử dụng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính linh hoạt ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giải quyết các tình huống thực tế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này khiến các hãng phải chuyển hướng nghiên cứu: không chỉ phát triển bộ thu GNSS tốt hơn, mà còn phải tìm cách giúp người dùng làm việc hiệu quả hơn.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>7. RTK đang dần trở thành nền tảng tích hợp cảm biến</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu quan sát sự phát triển của các thế hệ RTK gần đây, có thể thấy một xu hướng rất rõ. RTK không còn đơn thuần là thiết bị thu tín hiệu vệ tinh mà nó đang trở thành một nền tảng tích hợp nhiều cảm biến:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IMU.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Laser.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công nghệ xử lý hình ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thuật toán tự động hóa và trí tuệ nhân tạo (AI).</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi công nghệ đều nhằm giải quyết một khó khăn cụ thể ngoài công trường.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image(1).png" style="width: 680px; height: 680px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Có thể nói, khi khả năng thu tín hiệu GNSS giữa các thế hệ thiết bị ngày càng tiệm cận nhau, cuộc cạnh tranh của các hãng đang dần chuyển sang một hướng mới: giúp kỹ sư hoàn thành công việc nhanh hơn, an toàn hơn và thuận tiện hơn ngoài thực địa.</span></span> <p data-end="2546" data-start="2275"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera, IMU và Laser Survey có thể chỉ là những bước khởi đầu cho xu hướng đó. Trong tương lai, GNSS RTK nhiều khả năng sẽ không chỉ là thiết bị định vị vệ tinh, mà sẽ trở thành một nền tảng tích hợp nhiều cảm biến phục vụ công tác khảo sát và thi công ngoài hiện trường. </span></span><br /> </p> <h2 data-end="2546" data-start="2275"> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt </strong></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">để được tư vấn và hỗ trợ tốt nhất!</span></h2> ', 'images' => '2026061214390046f6215956d7c46255d00263c715c9d4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng Trung Quốc chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'meta_key' => '', 'meta_des' => 'Khám phá xu hướng phát triển mới của các hãng GNSS RTK như CHCNAV, eSurvey và nhiều thương hiệu khác. Từ IMU, Camera đến Laser Survey, cuộc đua công nghệ đang chuyển từ phần cứng GNSS sang nâng cao trải nghiệm làm việc ngoài thực địa.', 'created' => '2026-06-12', 'modified' => '2026-07-11', 'status' => '1', 'view' => '778', 'slug' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '547', 'rght' => '548', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '817', 'name' => 'Định dạng file RTK: Hướng dẫn xuất, nhập và xử lý lỗi thường gặp trong đo đạc', 'code' => null, 'alias' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.</span></span>', 'content' => '<p> <em><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong thực tế, công việc đo đạc không kết thúc khi Rover báo FIX hoặc khi hoàn thành việc thu thập tọa độ ngoài hiện trường. Sau bước đo đạc, dữ liệu thường phải trải qua nhiều công đoạn như:</span></em><br /> </p> <ul> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển về văn phòng.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biên tập trên AutoCAD hoặc CASS.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý trên Civil 3D, Trimble Business Center (TBC), Leica Infinity.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra trên Google Earth.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển giao cho chủ đầu tư hoặc đơn vị thiết kế.</span></span></em></li> </ul> <br /> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ cần xuất sai định dạng hoặc thiếu dữ liệu, toàn bộ quy trình phía sau có thể bị gián đoạn. Theo tài liệu của Trimble Business Center, hệ sinh thái khảo sát hiện nay hỗ trợ rất nhiều định dạng khác nhau như CSV, TXT, DXF, DWG, KML, SHP, XML, JOB, RINEX... phục vụ các mục đích sử dụng khác nhau.<br /> </span></span></em> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/61sq3Qk7zvL.jpg" style="width: 600px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Các định dạng file dữ liệu phổ biến ở máy RTK</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 CSV (*.csv)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV (Comma Separated Values) là định dạng được sử dụng nhiều nhất trong công tác đo đạc hiện nay. Thông thường file CSV có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số hiệu điểm (Point ID)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Code</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi chú</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ: </strong></u> Point,X,Y,H,Code<br /> P1,234567.123,1234567.456,15.234,COTDIEN</em><br /> <br /> <u><strong>Ưu điểm</strong></u></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở được bằng Excel.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dung lượng nhỏ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ gửi Email, Zalo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ nhập vào Civil 3D, AutoCAD, QGIS, TBC.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><u><strong>Nhược điểm</strong></u></span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có tiêu chuẩn cấu trúc thống nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hai file CSV có thể chứa các trường dữ liệu khác nhau.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Leica Captivate và CHCNAV LandStar, người dùng có thể tự định nghĩa cấu trúc CSV xuất ra bằng cách thêm hoặc bớt các trường dữ liệu cần thiết.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên.png" style="width: 480px; height: 480px;" /> </span></span></p> <p style="text-align: center;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ví dụ về File tọa độ mốc</span></span></em></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 TXT (*.txt)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">TXT là file dữ liệu dạng văn bản thuần và thường được sử dụng khi:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển dữ liệu giữa các phần mềm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập dữ liệu stakeout.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉnh sửa thủ công bằng Notepad hoặc Notepad++.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ưu điểm lớn nhất là khả năng tùy biến cấu trúc dữ liệu.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 DAT (*.dat)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT là định dạng quen thuộc với nhiều đơn vị thành lập bản đồ địa hình với nhiều ứng dụng như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CASS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập bản đồ địa hình.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại Việt Nam, DAT vẫn là định dạng được sử dụng rất nhiều trong công tác đo vẽ địa hình.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 DXF (*.dxf)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF là định dạng trao đổi dữ liệu CAD. Theo Leica Captivate, DXF được sử dụng để chuyển trực tiếp điểm, đường, layer và các đối tượng CAD giữa hiện trường và văn phòng.<br /> <br /> <strong><u>Ưu điểm</u></strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở trực tiếp trên AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không cần nhập tọa độ thủ công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giữ được nhiều thông tin bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5 KML (*.kml)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML là định dạng của Google Earth với nhiều ứng dụng như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra vị trí điểm ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối chiếu dữ liệu khảo sát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ nhanh vị trí công trình.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Trimble, KML/KMZ là một trong những định dạng phổ biến để trao đổi dữ liệu tọa độ địa lý 3D.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.6 SHP (*.shp)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP (Shapefile) là định dạng GIS được sử dụng trong:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">QGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ArcGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống quản lý dữ liệu không gian.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica Captivate còn cho phép xuất thêm các trường chất lượng điểm đo và thông tin tọa độ vào Shapefile.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7 XLS / XLSX</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số phần mềm cho phép xuất trực tiếp sang Excel với ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ chỉnh sửa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ lập bảng tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp cho hồ sơ hoàn công.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Khi nào nên chọn CSV, DAT, DXF hay SHP?</span></span></h2> <br /> <table border="0" cellpadding="0" style="width: 100%"> <tbody> <tr> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mục đích</span></span></strong><br /> </td> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng khuyến nghị</span></span></strong><br /> </td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gửi tọa độ cho chủ đầu tư</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, XLSX</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập AutoCAD</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT, DXF</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập Civil 3D</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Google Earth</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GIS</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout công trình</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ dữ liệu nhanh</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV</span></span></td> </tr> </tbody> </table> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/c64e8674de5294e51c9bd4133e27d964aede72fb_2_1024x516.png" style="width: 600px; height: 302px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Hướng dẫn xuất dữ liệu trên máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù giao diện giữa Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay Matesurvey (Geomate) có khác nhau nhưng quy trình cơ bản tương đối giống nhau với các bước như sau:<br /> <br /> - <strong>Bước 1</strong>: Mở Project hoặc Job cần xuất.<br /> <br /> - <strong>Bước 2</strong>: Kiểm tra danh sách điểm đã lưu.<br /> <br /> - <strong>Bước 3</strong>:Chọn Export Data.<br /> <br /> - <strong>Bước 4</strong>: Chọn định dạng: <em>CSV; ;TXT; DAT; DXF; KML ; SHP</em><br /> <br /> - <strong>Bước 5</strong>: Kiểm tra cấu trúc dữ liệu xuất. Một số phần mềm cho phép tùy chỉnh:<br /> <em>Point ID<br /> Easting<br /> Northing<br /> Elevation<br /> Code<br /> Rod Height<br /> Antenna Height<br /> PDOP<br /> Trạng thái FIX/FLOAT</em><br /> <br /> - <strong>Bước 6</strong>: Lưu file và kiểm tra lại trước khi gửi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Hướng dẫn nhập dữ liệu vào máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài việc xuất dữ liệu từ máy RTK, nhu cầu nhập dữ liệu vào máy để phục vụ công tác bố trí công trình (Stake Out), dẫn đường hoặc kiểm tra tọa độ cũng rất phổ biến. Hiện nay hầu hết các phần mềm đo đạc như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey), MateSurvey (Geomate) đều hỗ trợ nhập các định dạng phổ biến như:CSV (*.csv); TXT (*.txt); DXF (*.dxf). Trong đó CSV là định dạng được sử dụng nhiều nhất.<br /> <br /> <strong>- Bước 1: </strong>Chuẩn bị File dữ liệu<br /> Xuất dữ liệu từ:AutoCAD; Civil 3D; Excel; QGIS; TBC; Leica Infinityvề định dạng CSV hoặc TXT.<br /> <br /> <strong>- Bước 2: </strong>Chép File vào sổ tay<br /> Có thể thực hiện bằngcáp USB, bluetooth, Wi-Fi, đồng bộ Cloud (tùy thiết bị).<br /> <br /> <strong>- Bước 3: </strong>Nhập dữ liệu<br /> Project > Import > Chọn định dạng file > Chọn file cần nhập.<br /> <br /> <strong>- Bước 4: </strong>Khai báo cấu trúc dữ liệu<br /> Đây là bước quan trọng nhất.Người dùng cần khai báo chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Point ID</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Code</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Leica Captivate và Trimble Access, khi nhập dữ liệu cần kiểm tra chính xác thứ tự cột dữ liệu để tránh sai lệch tọa độ.<br /> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Những lỗi thường gặp khi nhập và xuất dữ liệu RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù việc xuất và nhập dữ liệu trên các phần mềm như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay MateSurvey (Geomate) tương đối đơn giản, nhưng thực tế ngoài công trường vẫn thường xuyên phát sinh các lỗi làm mất thời gian xử lý dữ liệu hoặc thậm chí ảnh hưởng đến kết quả thi công.<br /> Dưới đây là những lỗi phổ biến nhất.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.1 Xuất file thành công nhưng mở ra không có dữ liệu</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá nhiều người dùng RTK từng gặp với các biểu hiện như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File được tạo thành công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có tên dự án hoặc tiêu đề file.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có điểm tọa độ bên trong.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường gặp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Project hoặc Job.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Data File.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đang bật bộ lọc dữ liệu (Filter).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai loại điểm cần xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Database không chứa dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Kiểm tra lại Point Database.<br /> - Kiểm tra đúng Project đang làm việc.<br /> - Tắt các bộ lọc dữ liệu trước khi xuất.<br /> - Chọn xuất toàn bộ điểm (All Points).<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.2 File đuôi .CSV mở ra bằng excel nhưng hiển thị trống hoặc sai cột</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biểu hiện thường thấy:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File vẫn có dung lượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel mở được nhưng dữ liệu dồn vào một cột.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tưởng rằng file bị lỗi hoặc mất dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel đọc sai dấu phân cách dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File sử dụng dấu "," trong khi máy tính đang cấu hình dấu ";" hoặc ngược lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mã hóa ký tự (Encoding).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Mở thử bằng Notepad hoặc Notepad++.<br /> - Sử dụng chức năng Import Data / From Text trong Excel.<br /> - Kiểm tra lại dấu phân cách dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.3 CSV của người khác có nhiều cột hơn hoặc ít cột hơn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều người cho rằng CSV là định dạng cố định. Thực tế không phải vậy. Một file CSV có thể chỉ chứa:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point ID ( Số hiệu điểm)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting ( Tọa đọ X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing ( Tọa độ Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation ( Cao độ)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài các trường dữ liệu cơ bản như <strong>Số hiệu điểm, Tọa độ X, Tọa độ Y và Cao độ H</strong>, nhiều phần mềm RTK còn cho phép xuất thêm các thông tin như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mã điểm (Code)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao sào (Rod Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao ăng-ten (Antenna Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số PDOP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm (Fix Status)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc phương vị (Azimuth)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô tả hoặc ghi chú điểm (Description)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân là do cấu hình định dạng xuất dữ liệu của từng phần mềm hoặc từng đơn vị sử dụng. Đây không phải lỗi dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.4 Nhập dữ iệu thành công nhưng điểm nằm sai vị trí</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi nguy hiểm nhất vì rất khó phát hiện nếu không kiểm tra lại.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhầm thứ tự cột X và Y.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục VN-2000.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai đơn vị tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ:</strong></u><br /> Đúng: Point,X,Y,H<br /> P1,234567.123,1234567.456,10.123<br /> <br /> Sai: Point,Y,X,H<br /> P1,1234567.456,234567.123,10.123</em><br /> <br /> Kết quả là điểm có thể xuất hiện cách vị trí thực hàng chục hoặc hàng trăm kilomet.<br /> <br /> <strong>Cách xử lý:</strong><br /> - Kiểm tra lại cấu trúc file.<br /> - Kiểm tra đúng thứ tự Easting và Northing.<br /> - Kiểm tra hệ tọa độ công trình.<br /> - Đối chiếu với một điểm khống chế đã biết.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.5 Nhập dữ liệu thành công nhưng không nhìn thấy điểm</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lúc này máy báo nhập dữ liệu thành công, danh sách điểm vẫn có nhưng không nhìn thấy điểm trên bản đồ.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nằm ngoài phạm vi hiển thị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai Projection.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Zoom Extents.<br /> - Kiểm tra lại hệ tọa độ.<br /> - Kiểm tra lại Projection và KTT.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.6 Nhập dữ liệu định dạng DXF nhưng không hiển thị đối tượng</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lỗi này xảy ra do những nguyên nhân như:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer đang tắt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF không tương thích.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng nằm ngoài vùng hiển thị.</span></span></li> </ul> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cách xử lý:</span></span></strong><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Layer.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thử lưu lại DXF phiên bản thấp hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Zoom Extents để kiểm tra toàn bộ bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> CSV, TXT, DAT, DXF, KML hay SHP đều là những định dạng dữ liệu quan trọng trong công tác đo đạc hiện đại. Không có định dạng nào là "tốt nhất" cho mọi trường hợp. Lựa chọn đúng định dạng xuất dữ liệu sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thời gian xử lý văn phòng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế lỗi chuyển đổi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả phối hợp giữa khảo sát, thiết kế và thi công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm rủi ro mất dữ liệu hoặc bàn giao sai định dạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế hiện nay, CSV vẫn là định dạng phổ biến nhất nhờ tính linh hoạt, dễ sử dụng và khả năng tương thích với hầu hết các phần mềm đo đạc, CAD và GIS.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/588632958_1241954074621445_1455996422080404648_n.jpg" style="width: 747px; height: 420px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '2026060609425746cdab6ee8d08331f2369b4b04a4a4d5.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Định dạng file RTK: CSV, DAT, DXF, KML, SHP và Cách Xuất, Nhập Dữ Liệu', 'meta_key' => '', 'meta_des' => 'Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.', 'created' => '2026-06-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '877', 'slug' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '545', 'rght' => '546', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '816', 'name' => 'Sửa chữa máy thủy bình bị rơi, va đập – Nguyên nhân gây đo sai ngoài công trường', 'code' => null, 'alias' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-–-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> <br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy. Đây được xem như “trái tim” của máy thủy bình tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850337449414_cbf23e5b4edf679eed8636152be1bb10.jpg" style="width: 600px; height: 800px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cụm cân bằng tự động hoạt động theo nguyên lý trọng lực với hệ thống con lắc treo bằng dây cực nhỏ kết hợp cơ cấu giảm dao động từ tính để giữ tia ngắm luôn nằm ngang. Nhờ đó máy có thể tự cân bằng nhanh và cho độ chính xác cao ngoài công trường. Tuy nhiên, cấu tạo này cũng khá nhạy với va đập. Chỉ một cú rơi hoặc vận chuyển mạnh cũng có thể gây các lỗi như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Liệt rung cụm compensator.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhảy rung hoặc kẹt rung.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xoắn hoặc lệch dây treo con lắc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số cao độ tăng bất thường.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế sửa chữa, phần lớn các trường hợp máy thủy bình đo sai sau va đập đều liên quan trực tiếp đến cụm cân bằng tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850429563246_858468dda57655643001cdc5b7476042.jpg" style="width: 600px; height: 800px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Một số dấu hiệu nhận biết máy thủy bình bị sai sau va đập</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi máy thủy bình bị rơi, va đập hoặc vận chuyển mạnh, nếu xuất hiện các dấu hiệu dưới đây thì nên kiểm tra ngay cụm cân bằng tự động bên trong máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả chênh lệch bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng một vị trí nhưng đo nhiều lần ra số khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số rất lớn, thậm chí lệch đến hàng mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy vẫn đọc mia bình thường nhưng cao độ không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi lắc nhẹ máy không còn nghe tiếng rung “roong roong” êm như lúc mới mua.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, cụm con lắc bên trong đã bị:<br /> <br /> • Liệt rung<br /> • Kẹt rung<br /> • Xoắn dây treo<br /> • Hoặc mất khả năng cân bằng tự động<br /> <br /> Điều nguy hiểm là bên ngoài máy vẫn có thể hoạt động “có vẻ bình thường”, khiến người dùng khó phát hiện nếu không kiểm tra sai số trước khi thi công. Vì vậy, sau mỗi lần máy bị va đập, nên kiểm tra sai số góc i hoặc test đo đi – đo về trước khi tiếp tục sử dụng ngoài công trường.<br /> <br /> Khuyến nghị sau khi thiết bị bị va đập:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy và ốc cân bằng bằng cách quay máy 180° để quan sát độ dịch chuyển bọt thủy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai số góc i bằng phương pháp hai mia hoặc thử nghiệm đối chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không tiếp tục đo công trình khi chưa xác định chính xác tình trạng thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì chỉ một máy bị lệch cũng có thể truyền sai số cho toàn bộ số liệu ngoài công trường.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (6).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 420px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Qui trình sửa chữa máy thủy bình tại Trắc địa Thành Đạt</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bước 1: Tiếp nhận và kiểm tra tổng thể thiết bị.<br /> Bước 2: Kiểm tra cụm treo con lắc và cụm cân bằng tự động.<br /> Bước 3: Báo lỗi, báo giá sửa chữa và hiệu chỉnh.<br /> Bước 4: Cân chỉnh cụm compensator — công đoạn quan trọng nhất.<br /> Bước 5: Hiệu chỉnh sai số góc i.<br /> Bước 6: Kiểm tra thực địa sau sửa chữa.<br /> Bước 7: Dán tem kiểm nghiệm trước khi bàn giao cho khách hàng.<br /> <br /> Một máy thủy bình bị lệch không chỉ làm sai một điểm đo… mà có thể truyền sai số cho toàn bộ tuyến hoặc số liệu ngoài công trường.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Q&A - Kiểm tra máy thủy bình/ thủy chuẩn sau khi bị rơi, va đập</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy thủy bình bị rơi/ va đập có cần kiểm tra lại không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Đây là bước rất quan trọng trước khi tiếp tục thi công vì chỉ một sai lệch nhỏ trên máy thủy bình cũng có thể ảnh hưởng đến toàn bộ số liệu cao độ ngoài công trường. Nhiều trường hợp máy vẫn đọc mia bình thường nhưng thực tế tia ngắm đã bị sai lệch sau va đập.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi bị rơi máy thủy bình thường gặp những lỗi gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số lỗi phổ biến gồm:<br /> • Lệch bọt thủy.<br /> • Sai số góc i lớn.<br /> • Liệt rung hoặc nhảy rung cụm cân bằng tự động.<br /> • Nhìn mia hoặc mục tiêu không rõ.<br /> • Hư ốc cân bằng, vi động hoặc đế máy.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình bị lệch bọt thủy?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường do vận chuyển không đúng cách hoặc máy bị tác động mạnh khiến hệ thống cân bằng thay đổi vị trí, dẫn đến máy khó cân bằng hoặc cân bằng nhưng số đo không ổn định.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sai số góc i trên máy thủy bình là gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i là tình trạng tia ngắm không còn nằm ngang chuẩn. Khi đó đo đi – đo về có thể cho kết quả khác nhau và sai số cao độ tăng bất thường. Đây là lỗi rất phổ biến sau khi máy thủy bình bị va đập.</span></span></p> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Sai số góc i.png" style="width: 665px; height: 295px;" /></h3> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>“Liệt rung” hoặc “nhảy rung” là gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi liên quan đến cụm cân bằng tự động (Automatic Compensator) bên trong máy thủy bình. Cụm con lắc bên trong có thể bị: đứt dây treo, xoắn dây, kẹt rung hoặc lệch cơ cấu giảm dao động từ tính. <br /> Khi đó máy không còn tự cân bằng chính xác dù vẫn có thể đọc mia bình thường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850459087569_e24952711404d15f27d74612fb6b68f7.jpg" style="width: 460px; height: 219px;" /></span></span></p> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Dây rung máy thủy bình</em></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình nhìn mia không rõ sau va chạm?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân có thể do:<br /> <br /> • Kính bị bẩn hoặc trầy xước.<br /> • Hệ thống lấy nét bị ảnh hưởng.<br /> • Cụm quang học bị lệch sau va đập.<br /> <br /> Nếu không kiểm tra sớm có thể ảnh hưởng trực tiếp đến độ chính xác đo đạc.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy bị hư ốc cân bằng hoặc đế máy có nghiêm trọng không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Nếu máy bị rơi mạnh, các bộ phận cơ khí như: vi động, ốc cân bằng, đế máy… có thể bị cong, nứt hoặc biến dạng khiến việc cân bằng và đo đạc không còn chính xác như ban đầu.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi máy thủy bình bị rơi nên làm gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy, kiểm tra sai số góc i và cụm con lắc tự động trước khi tiếp tục đo công trình. </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm để tránh truyền sai số cho toàn bộ số liệu thi công. </span></p> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <strong style="margin: 0px; padding: 0px; font-weight: bold;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><a href="https://zalo.me/0913051734">Trắc Địa Thành Đạt</a> – Cung cấp máy thủy bình chính hãng!</span></span></strong></p> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Hotline: <strong style="margin: 0px; padding: 0px; font-weight: bold;">0913 051 734 / 0942 288 388</strong></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Địa chỉ: 145 Láng Hạ – Đống Đa – Hà Nội<br style="margin: 0px; padding: 0px;" /> Fanpage: Trắc Địa Thành Đạt</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '20260521180410f10bb16a2b4a9dbcb155bfe047377890.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Sửa Chữa Máy Thủy Bình Bị Rơi, Va Đập – Nguyên Nhân Gây Đo Sai & Cách Khắc Phục!', 'meta_key' => '', 'meta_des' => 'Máy thủy bình bị rơi, va đập dễ gây liệt rung, nhảy rung, sai số góc i và đo cao độ sai. Tìm hiểu nguyên nhân, dấu hiệu nhận biết và quy trình sửa chữa – hiệu chỉnh máy thủy bình tại Trắc Địa Thành Đạt.', 'created' => '2026-05-21', 'modified' => '2026-07-12', 'status' => '1', 'view' => '910', 'slug' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '543', 'rght' => '544', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '815', 'name' => 'Đo hầm bằng máy toàn đạc: So sánh Tunnel App Leica và giải pháp của các hãng khác', 'code' => null, 'alias' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi nói đến đo hầm bằng máy toàn đạc, thách thức lớn nhất không nằm ở thao tác đo… mà ở việc kiểm soát sai số và tiến độ thi công ngay tại hiện trường.</span></span>', 'content' => '<p> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong các công trình hầm, metro hoặc hạ tầng ngầm, đo hầm bằng máy toàn đạc là phương pháp gần như bắt buộc do không thể sử dụng GNSS. </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tuy nhiên, thách thức lớn nhất không nằm ở việc đo được điểm, mà là kiểm soát sai số và phát hiện sai lệch kịp thời ngay tại hiện trường. Nếu sai số chỉ được phát hiện sau khi xử lý dữ liệu tại văn phòng, việc hiệu chỉnh sẽ trở nên tốn kém và ảnh hưởng trực tiếp đến tiến độ thi công. </span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chính vì vậy, các hãng thiết bị trắc địa đã phát triển nhiều giải pháp khác nhau nhằm hỗ trợ kỹ sư kiểm soát tốt hơn trong quá trình đo hầm.</span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Tunnel App trên máy toàn đạc Leica FlexLine</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 Tunnel App là gì?</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tunnel App là module phần mềm tích hợp trong hệ điều hành FlexField trên các dòng máy toàn đạc Leica FlexLine như TS03 và TS07.<br /> <br /> Ứng dụng này cho phép người dùng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nạp dữ liệu thiết kế tuyến và biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực hiện stakeout trực tiếp ngoài hiện trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo profile và kiểm tra đào – đắp (cut & fill)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh sai lệch với thiết kế ngay trên máy</span></span></li> </ul> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.2 Ưu điểm của Tunnel App</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với phương pháp đo truyền thống, Tunnel App mang lại một số lợi ích rõ rệt:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thao tác trung gian giữa hiện trường và văn phòng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hiển thị sai lệch trực quan theo biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ phát hiện sai số ngay trong quá trình đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng tốc độ thi công và kiểm tra</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nổi bật của Leica là khả năng tích hợp toàn bộ workflow ngay trên thiết bị, phù hợp với các công trình cần triển khai nhanh ngoài hiện trường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Quy trình đo hầm ngoài công trường</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị của Leica, Trimble, Topcon hay các hãng khác, quy trình đo hầm bằng máy toàn đạc ngoài công trường về bản chất vẫn tuân theo một nguyên tắc chung: t<strong>hiết lập đúng – bố trí đúng – kiểm tra liên tục.</strong><br /> <br /> Bước đầu tiên và quan trọng nhất là <strong>thiết lập trạm máy</strong>. Kỹ sư trắc địa cần đặt máy tại vị trí khống chế đã biết tọa độ và định hướng bằng phương pháp <strong>backsight hoặc resection</strong>. Độ chính xác của bước này có ảnh hưởng trực tiếp đến toàn bộ tuyến hầm, bởi chỉ cần sai lệch nhỏ ở định hướng ban đầu cũng có thể dẫn đến sai số tích lũy theo chiều dài công trình.<br /> <br /> Sau khi trạm máy được thiết lập chính xác, dữ liệu thiết kế sẽ được nạp vào hệ thống. Các thông tin bao gồm tim tuyến (alignment), lý trình và biên dạng hầm (cross-section) đóng vai trò làm cơ sở để thực hiện stakeout ngoài thực địa. Ở giai đoạn này, việc kiểm tra lại hệ tọa độ, đơn vị và hướng tuyến là cần thiết nhằm tránh các sai sót do nhập liệu hoặc chuyển đổi dữ liệu.<br /> <br /> Trong quá trình thi công, các điểm đặc trưng của biên dạng hầm sẽ được bố trí trực tiếp ngoài hiện trường thông qua máy toàn đạc. Người đo sẽ lần lượt xác định vị trí các điểm theo thiết kế và hướng dẫn thi công đào hầm theo đúng hình học yêu cầu. Tuy nhiên, việc “bố trí đúng” chưa phải là bước cuối cùng.<br /> <br /> Khâu kiểm tra mới là yếu tố quyết định chất lượng. Các điểm sau khi bố trí cần được đo lại và so sánh với thiết kế bằng các phép đo lặp hoặc thông qua các công cụ kiểm tra trên máy. Việc này giúp phát hiện sớm các sai lệch về vị trí, cao độ hoặc hình dạng biên dạng hầm, từ đó kịp thời điều chỉnh trước khi sai số bị tích lũy.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/LGS_streamline_tunnel_construction_and_maintenance_2480x750.jpg" style="width: 800px; height: 242px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế, nhiều sai số lớn trong thi công hầm không đến từ thiết bị, mà đến từ việc không kiểm tra hoặc kiểm tra quá muộn. Vì vậy, một quy trình đo hầm hiệu quả luôn phải đảm bảo nguyên tắc: đo đến đâu, kiểm tra đến đó.<br /> <br /> Sự khác biệt giữa các hãng thiết bị hiện nay chủ yếu nằm ở mức độ hỗ trợ người dùng trong từng bước của quy trình này. Tuy nhiên, dù sử dụng công nghệ nào, cốt lõi của đo hầm bằng máy toàn đạc vẫn không thay đổi: <strong>Thiết lập chuẩn – dữ liệu đúng – kiểm tra liên tục.</strong></span></span> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. So sánh các giải pháp đo hầm của các hãng</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Leica – All-in-one tại hiện trường</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica là hãng đi theo hướng tích hợp toàn bộ quy trình đo hầm vào một ứng dụng duy nhất. Tunnel App giúp người dùng thực hiện liên tục các bước từ nạp dữ liệu, bố trí đến kiểm tra ngay tại hiện trường mà không cần phụ thuộc nhiều vào xử lý hậu kỳ.<br /> Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình thi công nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đội thi công cần thao tác đơn giản, trực quan.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica App Tunnel 3.jpg" style="width: 800px; height: 428px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Trimble – Hệ sinh thái và xử lý thiết kế</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trimble sử dụng phần mềm Trimble Access kết hợp với module Tunnels chuyên dụng. Giải pháp này tập trung vào khả năng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý alignment phức tạp</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối với phần mềm thiết kế như TBC</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý dữ liệu trong các dự án lớn</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự án metro, hầm quy mô lớn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu đồng bộ BIM</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Trimple tunnel.jpg" style="width: 800px; height: 446px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Topcon – Linh hoạt theo workflow</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không giống Leica, <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu-topcon-gm-50-series.html">Topcon</a> không phát triển một module “Tunnel App” riêng biệt cho dòng máy toàn đạc. Thay vào đó, hãng lựa chọn hướng tiếp cận linh hoạt hơn thông qua phần mềm <strong>MAGNET Field</strong>. Trong thực tế, công tác đo hầm bằng máy toàn đạc Topcon được thực hiện bằng cách kết hợp nhiều chức năng sẵn có như alignment, stakeout, offset và kiểm tra profile.<br /> <br /> <strong>Workflow điển hình trên Topcon</strong><br /> <br /> Người dùng sẽ bắt đầu bằng việc nạp dữ liệu tuyến (alignment) và các thông số thiết kế vào phần mềm. Sau khi thiết lập trạm máy, quá trình stakeout được thực hiện thông qua các điểm tuyến và các khoảng lệch (offset) theo biên dạng hầm. <br /> Đối với kiểm tra hình học, kỹ sư thường đo lại các điểm trên biên dạng thực tế và so sánh với thiết kế thông qua các công cụ kiểm tra trong phần mềm hoặc xử lý hậu kỳ.<br /> <br /> <strong>Ưu điểm của cách tiếp cận này</strong><br /> <br /> Điểm mạnh lớn nhất của Topcon là tính linh hoạt. Người dùng có thể tùy biến quy trình đo theo từng loại công trình mà không bị giới hạn bởi một module cố định. Điều này đặc biệt hữu ích trong các dự án có yêu cầu đặc thù hoặc khi dữ liệu thiết kế không theo một chuẩn cố định.<br /> <br /> <strong>Hạn chế cần lưu ý</strong><br /> <br /> Tuy nhiên, việc không có một module tunnel chuyên dụng cũng đồng nghĩa với việc:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy trình đo phụ thuộc nhiều vào kinh nghiệm người sử dụng,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc kiểm tra sai số không trực quan bằng các hệ thống tích hợp,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần hiểu rõ workflow để tránh sai sót trong quá trình triển khai.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nói cách khác, Topcon không làm “ít hơn”, nhưng yêu cầu người dùng phải “hiểu nhiều hơn”.</span></span><br /> <br /> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel.jpg" style="text-align: center; font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 800px; height: 533px;" /></h3> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.4 Nikon / Sokkia – Phương pháp truyền thống</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các dòng máy của Nikon và Sokkia chủ yếu sử dụng phương pháp truyền thống:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout cơ bản</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo và kiểm tra thủ công</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giải pháp này vẫn đáp ứng tốt các công trình quy mô nhỏ, nhưng hạn chế khi cần xử lý các dự án phức tạp.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Sự khác biệt cốt lõi trong đo hầm và yếu tố ảnh hưởng tới độ chính xác</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm khác biệt quan trọng nhất giữa các giải pháp không nằm ở khả năng đo, mà nằm ở thời điểm phát hiện sai số.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp truyền thống: phát hiện sai sau khi đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm tích hợp (Tunnel App, Tunnels Module): phát hiện sai ngay trong quá trình đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc phát hiện sai số sớm giúp giảm chi phí hiệu chỉnh và hạn chế rủi ro trong thi công.<br /> </span></span> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Những yếu tố ảnh hưởng đến độ chính xác</strong></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị hay phần mềm nào, độ chính xác trong đo hầm vẫn phụ thuộc vào:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định hướng trạm máy (backsight)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện môi trường ảnh hưởng đến đo EDM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số truyền tọa độ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kỹ năng và thao tác của người sử dụng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các phần mềm hiện đại chỉ đóng vai trò hỗ trợ, không thể thay thế hoàn toàn quy trình kiểm soát kỹ thuật ngoài công trường.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel 2.jpg" style="width: 800px; height: 415px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Đo hầm bằng máy toàn đạc đã có sự chuyển dịch rõ rệt từ phương pháp thủ công sang các giải pháp tích hợp và trực quan hơn. Tunnel App của Leica là một ví dụ điển hình cho xu hướng đưa việc kiểm soát sai số xuống ngay tại hiện trường. Trong khi đó, các hãng khác như Trimble, Topcon hay Nikon lựa chọn những hướng tiếp cận khác nhau, phù hợp với từng loại công trình và nhu cầu sử dụng.<br /> Tuy nhiên, yếu tố quan trọng nhất vẫn là: Hiểu đúng quy trình đo và chủ động kiểm soát sai số trong suốt quá trình thi công<br /> <br /> Nếu bạn cần tư vấn lựa chọn máy toàn đạc hoặc giải pháp đo hầm phù hợp với công trình, liên hệ ngay với chúng tôi!<br /> <br /> <span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt – Luôn đồng hành cùng bạn!</strong></span><br /> </span></span>', 'images' => '202604231558382137741e17c2868ead929b32a270f9f6.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Đo hầm bằng máy toàn đạc: Leica Tunnel App và các hãng khác', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách đo hầm bằng máy toàn đạc Leica với Tunnel App và so sánh với Trimble, Topcon, Nikon. Quy trình, ưu nhược điểm và cách kiểm soát sai số ngoài công trường.', 'created' => '2026-04-23', 'modified' => '2026-07-12', 'status' => '1', 'view' => '1482', 'slug' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '541', 'rght' => '542', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '814', 'name' => 'Máy toàn đạc điện tử: ĐO CHUẨN – BỐ TRÍ NHANH – ỔN ĐỊNH NGOÀI CÔNG TRƯỜNG!', 'code' => null, 'alias' => 'may-toan-dac-dien-tu-do-chuan-–-bo-tri-nhanh-–-on-dinh-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> Tại <strong>Trắc Địa Thành Đạt</strong>, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> <br /> Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Vì sao máy toàn đạc vẫn là thiết bị không thể thay thế?</span></span></h2> <br /> <p data-end="216" data-start="105"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong điều kiện thi công thực tế tại Việt Nam, nhiều khu vực thường gặp hạn chế về khả năng đo GNSS, chẳng hạn:</span></span></p> <ul data-end="407" data-start="218"> <li data-end="296" data-section-id="3ju1r3" data-start="218"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không gian bị che khuất bởi nhà cao tầng, công trình dày đặc hoặc tầng hầm</span></span></li> <li data-end="337" data-section-id="k3xm0j" data-start="297"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu vệ tinh yếu hoặc nhiễu mạnh</span></span></li> <li data-end="407" data-section-id="utqol9" data-start="338"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Yêu cầu độ chính xác cao đến milimet trong quan trắc và hoàn công.</span></span></li> </ul> <p data-end="491" data-start="409"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong những trường hợp này, máy toàn đạc vẫn là giải pháp hiệu quả và ổn định nhờ:</span></span></p> <ul data-end="665" data-start="493"> <li data-end="553" data-section-id="1rjirb8" data-start="493"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng đo khoảng cách chính xác cao bằng công nghệ EDM</span></span></li> <li data-end="594" data-section-id="1tziawf" data-start="554"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phụ thuộc vào tín hiệu vệ tinh</span></span></li> <li data-end="665" data-section-id="rakyqa" data-start="595"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm soát chặt chẽ công tác bố trí điểm và thi công ngoài thực địa.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hai chức năng cốt lõi của máy toàn đạc</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 Đo điểm (Measurement)</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là chức năng cơ bản và quan trọng nhất của máy toàn đạc trong công tác khảo sát. Máy thực hiện đo các yếu tố hình học gồm:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc ngang (Horizontal Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc đứng (Vertical Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách (EDM – Electronic Distance Measurement)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ các giá trị này, hệ thống sẽ tính toán và xác định tọa độ không gian của điểm đo dưới dạng (X, Y, Z).<br /> <br /> Ngoài ra, máy toàn đạc hiện đại còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo không gương (Non-prism) trong điều kiện khó tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu trữ và quản lý dữ liệu điểm đo trực tiếp trên máy</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xuất dữ liệu phục vụ xử lý nội nghiệp (CAD, TBC, Civil 3D…)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát địa hình, đo vẽ bản đồ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo hiện trạng công trình, kiểm tra kích thước</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lập lưới khống chế và thu thập dữ liệu phục vụ thiết kế</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica-Nova-TS60-BC-facing-right.jpg" style="width: 750px; height: 258px;" /></span></span><span style="display: none;"> </span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 Bố trí điểm (Stakeout)</span></span></h3> <p data-end="1067" data-start="941"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí điểm là quá trình chuyển thông tin từ bản vẽ thiết kế ra vị trí ngoài thực địa, đóng vai trò quan trọng trong thi công.</span></span></p> <p data-end="1114" data-start="1069"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựa trên tọa độ thiết kế, hệ thống thực hiện:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh tọa độ thiết kế với vị trí thực tế của gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán sai lệch theo các phương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn người đo di chuyển theo các chỉ dẫn:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trái / phải</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tiến / lùi</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lên / xuống</span></span></li> </ul> </li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhờ đó, điểm ngoài thực địa được đưa về đúng vị trí thiết kế với độ chính xác cao.<br /> <br /> Ngoài ra, các dòng máy hiện nay còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí tuyến, cung tròn (Road / Arc stakeout)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí theo lưới, theo tim trục</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai lệch sau thi công (As-built check)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định vị tim trục công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí móng, cột, dầm, sàn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thi công hạ tầng, giao thông, công trình kỹ thuật</span></span></li> </ul> <h2 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/image (11).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 660px; height: 371px;" /></h2> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Những lỗi đo cạnh thường gặp và cách xử lý</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Nguyên lý đo cạnh của máy toàn đạc</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc xác định khoảng cách bằng cách:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát tín hiệu laser hoặc hồng ngoại đến gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận tín hiệu phản xạ quay về</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán khoảng cách dựa trên thời gian truyền (Time of Flight) hoặc độ lệch pha (Phase Measurement).</span></span></li> </ul> </li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các hãng như Leica, Topcon, Nikon hay Trimble đều sử dụng nguyên lý này, chỉ khác nhau về công nghệ xử lý tín hiệu và thuật toán nội bộ.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Các nguyên nhân gây lỗi đo cạnh</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.1 Suy giảm hệ đo EDM<br /> <br /> Đây là nguyên nhân phổ biến nhất trong thực tế. Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo lặp lại cho kết quả khác nhau</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách “nhảy số”, không ổn định</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Linh kiện EDM xuống cấp theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát yếu hoặc bộ thu tín hiệu kém</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Làm việc trong điều kiện ánh sáng mạnh hoặc phản xạ kém</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo tài liệu của Leica Geosystems, độ chính xác đo cạnh phụ thuộc lớn vào cường độ tín hiệu phản xạ và điều kiện môi trường.<br /> <br /> 3.2.2 Lệch trục EDM – trục ngắm (Collimation error)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo gần tương đối đúng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo xa sai lệch tăng dần</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bị va đập, rung lắc trong quá trình sử dụng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lâu không hiệu chuẩn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai lệch cơ khí tích lũy</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số này ảnh hưởng rõ rệt khi đo khoảng cách lớn, đặc biệt trong các công trình yêu cầu độ chính xác cao.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lỗi đo cạnh ( trục) 2.png" style="width: 680px; height: 295px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.3 Sai hằng số gương (Prism constant)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số gần như cố định trên mọi khoảng cách</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng sai loại gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai giá trị hằng số gương (0, -30, +17.5 mm…)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Trimble, việc thiết lập đúng prism constant là điều kiện bắt buộc để đảm bảo độ chính xác đo cạnh.<br /> <br /> 3.2.4 Ảnh hưởng môi trường đo<br /> <br /> Các yếu tố môi trường có thể ảnh hưởng đáng kể đến kết quả đo:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiệt độ và áp suất (P/T)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiễu khí quyển</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bề mặt phản xạ kém (tường sơn tối, bề mặt ướt, kim loại)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo khuyến nghị của FIG, sai số EDM tăng lên đáng kể trong điều kiện khí quyển không ổn định.<br /> <br /> 3.2.5 Sai số do thao tác người dùng<br /> <br /> Đây là nhóm lỗi rất phổ biến ngoài công trường.Bao gồm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựng sào không thẳng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai chiều cao gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập sai trạm máy hoặc điểm định hướng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình hệ tọa độ không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số do người dùng thường khó nhận biết nếu không có quy trình kiểm tra chéo.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Cách khắc phục</span></span></h3> <br /> <ul> <li data-end="2098" data-section-id="zvrhg8" data-start="2066"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra EDM, 2C, MO định kỳ</span></span></li> <li data-end="2130" data-section-id="uu2tiv" data-start="2099"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng đúng prism constant</span></span></li> <li data-end="2172" data-section-id="nwvnt0" data-start="2131"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm tra cạnh chuẩn trước thi công</span></span></li> <li data-end="2209" data-section-id="ux2ibp" data-start="2173"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh đo trong điều kiện bất lợi</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Các dòng máy toàn đạc phổ biến</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Leica</strong><br /> <br /> Leica là thương hiệu cao cấp trong lĩnh vực trắc địa, nổi bật với độ chính xác và độ ổn định lâu dài. Hệ EDM mạnh, khả năng làm việc tốt trong nhiều điều kiện môi trường khác nhau, đặc biệt phù hợp với các công trình yêu cầu kỹ thuật cao.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao, ổn định theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ EDM mạnh, ít bị ảnh hưởng bởi môi trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm và thuật toán xử lý tốt</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình cao tầng, cầu đường, quan trắc, dự án yêu cầu kiểm soát sai số chặt chẽ.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Leica toàn đạc.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Topcon</strong><br /> <br /> Topcon là dòng máy phổ biến nhờ sự cân bằng giữa hiệu năng và chi phí. Thiết bị dễ sử dụng, độ bền tốt, đáp ứng đa dạng nhu cầu thi công ngoài công trường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, thao tác nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ ổn định tốt trong điều kiện công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chi phí hợp lý</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, hạ tầng, thi công phổ thông.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z6599539340575_12c3eac505cba39e86905990604ee094.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nikon</strong><br /> <br /> Nikon là lựa chọn phù hợp cho các đơn vị cần thiết bị đo đạc cơ bản với chi phí đầu tư thấp. Thiết kế đơn giản, dễ tiếp cận và đáp ứng tốt các công việc đo đạc thông thường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giá tốt, dễ tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, phù hợp người mới</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền ổn định</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, khảo sát cơ bản.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/DTM 352 Nikon 2.jpg" style="width: 680px; height: 509px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Sokkia</strong><br /> <br /> Sokkia có cùng hệ sinh thái với Topcon, nổi bật về độ bền và khả năng làm việc ổn định trong điều kiện công trường khắc nghiệt. Thiết bị được đánh giá cao về tính “lành”, ít lỗi vặt.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền cao, ổn định lâu dài</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động tốt trong môi trường khắc nghiệt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác đáp ứng tốt thi công</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình hạ tầng, công trường làm việc cường độ cao.<br /> <br /> <strong>Trimble</strong><br /> <br /> Trimble tập trung mạnh vào giải pháp tích hợp và hệ sinh thái phần mềm. Các dòng máy toàn đạc của Trimble nổi bật ở khả năng kết nối, xử lý dữ liệu và làm việc đồng bộ với GNSS.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ sinh thái phần mềm mạnh (Access, TBC…)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tích hợp GNSS và quản lý dữ liệu tốt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp quy trình làm việc hiện đại</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Dự án lớn, doanh nghiệp cần đồng bộ dữ liệu và quản lý thi công<br /> <br /> > Mỗi thương hiệu đều có định hướng và thế mạnh riêng. Việc lựa chọn nên dựa trên nhu cầu thực tế, điều kiện công trường và yêu cầu kỹ thuật của từng dự án để đạt hiệu quả tối ưu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cách chọn máy toàn đạc phù hợp công trình</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc lựa chọn máy toàn đạc cần dựa vào yêu cầu kỹ thuật và điều kiện thi công thực tế, thay vì chỉ nhìn vào thương hiệu hoặc giá thành.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình dân dụng, hạ tầng cơ bản</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với các dòng Nikon hoặc Topcon nhờ dễ sử dụng, độ ổn định tốt và chi phí hợp lý. Đáp ứng hiệu quả cho các công việc đo đạc, bố trí thông thường.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu độ chính xác cao</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên ưu tiên Leica hoặc các dòng cao cấp, với độ chính xác và độ ổn định cao, phù hợp cho nhà cao tầng, kết cấu thép hoặc các hạng mục cần kiểm soát sai số chặt chẽ.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quan trắc, kiểm soát biến dạng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lựa chọn máy có độ chính xác cao và hệ EDM ổn định, đảm bảo khả năng lặp lại kết quả trong nhiều chu kỳ đo.<br /> <br /> Nguyên tắc quan trọng: Lựa chọn đúng thiết bị theo nhu cầu thực tế sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm sai số trong đo đạc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tối ưu chi phí đầu tư</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nâng cao hiệu quả thi công</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo chất lượng công trình</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Tại sao nên mua máy toàn đạc tại Trắc địa Thành Đạt?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi cung cấp đa dạng các loại máy toàn đạc của các hãng <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu">Leica</a>, Nikon, Topcon, đáp ứng nhiều nhu cầu khác nhau trong thi công và khảo sát.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tư vấn đúng nhu cầu công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ kỹ thuật ngoài công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn sử dụng, kiểm tra sai số</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cung cấp thiết bị chính hãng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> Bạn đang phân vân giữa các dòng máy toàn đạc? Hoặc gặp lỗi đo cạnh ngoài công trường?<br /> <br /> >>> Liên hệ ngay <a href="https://zalo.me/0913051734"><strong>Trắc Địa Thành Đạt</strong></a> để được tư vấn phù hợp nhất! </span></span>', 'images' => '20260505102744e930c0e340a0ba993987b0238086413c.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử: Báo giá, tư vấn chọn máy chuẩn công trình!', 'meta_key' => '', 'meta_des' => 'Tìm hiểu máy toàn đạc điện tử, cách chọn máy phù hợp công trình. Tư vấn thiết bị chính hãng tại Trắc Địa Thành Đạt!', 'created' => '2026-04-20', 'modified' => '2026-07-11', 'status' => '1', 'view' => '6424', 'slug' => 'may-toan-dac-dien-tu-do-chuan-bo-tri-nhanh-on-dinh-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '539', 'rght' => '540', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $tinlq = array( (int) 0 => array( 'Post' => array( 'id' => '644', 'name' => 'GNSS RTK', 'code' => null, 'alias' => 'gnss-rtk', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; border: 0px; background-image: initial; background-position: 0px 0px; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; outline: 0px; vertical-align: top; color: rgb(0, 0, 0); font-size: 14px; text-align: justify; font-weight: 700 !important;">GNSS RTK</span><span style="color: rgb(0, 0, 0); font-size: 14px; text-align: justify;"> được biết đến là thiết bị dùng trong công tác trắc địa giúp hỗ trợ quá trình khảo sát địa hình. Với khả năng tự động vẽ và lưu lại các khu vực khảo sát giúp nhanh chóng hoàn thiện các bản vẽ đầy đủ, chính xác với các thông số kỹ thuật cần thiết. Đây là thiết bị hỗ trợ đắc lực cho những người làm công tác trắc địa để có thể hoàn thành công việc nhanh chóng, tiết kiệm thời gian và chi phí với độ chính xác cao.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường hiện nay có rất nhiều dòng máy GNSS RTK với sự đa dạng về kiểu dáng thiết kế, các tính năng cũng như kích thước cho khách hàng lựa chọn. Với mỗi sản phẩm sẽ có những đặc tính cũng như công năng riêng phù hợp với nhu cầu sử dụng của từng đối tượng khách hàng cũng như tính chất công việc. Cùng tìm hiểu ưu và nhược điểm của máy GNSS RTK để có cái nhìn tổng quan về nó trước khi bạn lựa chọn đầu tư cho dự án của mình.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <strong>Ưu điểm nổi bật của máy GNSS RTK </strong><br /> <br /> Đảm bảo độ chính xác cao nhất trong quá trình làm việc. Đối với công tác trắc địa thì độ chính xác là thông số quan trọng nhất cần hướng tới trong quá trình làm việc do đó các thiết bị hỗ trợ cũng cần tối ưu hóa được yếu tố này. Với việc áp dụng công nghệ RTK cũng như CORS Network các mẫu máy này đảm bảo mang đến các thông số chuẩn nhất để cung cấp dữ liệu cho quá trình vẽ cũng như hình thành các dữ liệu chung.<br /> <br /> Trong việc sử dụng công nghệ GNSS thì CORS là trạm tham chiếu hoạt động liên tục để tạo sự liên kết các thiết bị với đường truyền tín hiệu. Công nghệ này giúp khoảng cách tối đa giữa trạm gốc và máy định vị GNSS được thiết lập khoảng 10 - 15km, giúp tăng khoảng cách cho hoạt động của máy. Điều này giúp giảm nhân công cũng như chi phí trong quá trình làm việc.<br /> <br /> Với thiết kế nhỏ gọn, dễ dàng di chuyển giúp mang đến sự tiện lợi tối đa trong quá trình sử dụng. <br /> <br /> Một ưu điểm phải kế đến của loại máy GNSS RTK đó là việc tích hợp nhiều tính năng thông minh trong cùng thiết bị. Các tính năng điều khiển bằng giọng nói, bảng điều khiển điện tử, việc thay đổi kích thước máy được tích hợp …giúp dễ dàng sử dụng cũng như có thể thực hiện được nhiều chức năng khác nhau cùng lúc.<br /> <br /> Bộ nhớ trong lớn giúp tăng khả năng lưu trữ thông tin cùng với đó là khả năng kết nối với máy tính, điện thoại, bluetooth hay 3G, 4G giúp nâng cao tối đa được các công năng cũng như sự tiện lợi trong quá trình sử dụng.<br /> <br /> Khả năng kết nối với các thiết bị khác tối ưu cùng với hệ thống CORS.<br /> <br /> Với chất liệu cao cấp có khả năng chống va đập cũng như hạn chế tối đa các tác động của các yếu tố bên ngoài giúp mang đến sản phẩm bền đẹp lâu dài theo thời gian sử dụng.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/phân phối máy định vị vệ tinh 2 tần số rtk (1).png" style="width: 850px; height: 604px;" /><br /> <br /> <strong>Nhược điểm của máy GNSS RTK</strong><br /> <br /> Hiện nay, máy GPS –GNSS RTK chất lượng dù đã được tích hợp đầy đủ các tính năng nhưng để có được độ chính xác tuyệt đối cùng với vi</span>ệc</span> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">thực hiện thêm nhiều công việc khác các bạn cần phải có sự kết nối thêm các thiết bị khác để sử dụng.<br /> <br /> Giới hạn làm việc của máy trong một phạm vi nhất định cũng là một khó khăn trong quá trình sử dụng. Do đó, cần tìm hiểu đầy đủ các thông số của máy trước khi lựa chọn để phù hợp với đặc điểm công việc.<br /> <br /> Giá thành cao cũng là một nhược điểm cần tính đến khi quyết định đầu tư. <br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Máy RTK.png" style="width: 850px; height: 680px;" /><br /> <br /> </span></span>', 'images' => '2021081816133230412c34d3b16d2ec66a3d1eba4d0d89.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Máy RTK, máy định vị vệ tinh RTK, máy GPS RTK, máy định vị vệ tinh GNSS RTK, máy RTK giá rẻ, máy RTK tốt nhất', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-18', 'modified' => '2026-07-12', 'status' => '1', 'view' => '20547', 'slug' => 'gnss-rtk', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '231', 'rght' => '232', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '641', 'name' => 'Phần mềm LandStar 7 và cách cài đặt trên máy tính', 'code' => null, 'alias' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LandStar 7 là một ứng dụng miễn phí được phát triển bởi www.chcnav.com, thuộc danh mục Bản đồ và dẫn đường. </span></span>', 'content' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="294" src="https://www.youtube.com/embed/04hr6Gy-3RE" title="YouTube video player" width="680"></iframe><br /> <br /> LandStar7 là giải pháp phần mềm khảo sát đã được kiểm chứng thực địa mới nhất dành cho mọi thiết bị Android và bộ điều khiển dữ liệu CHCNAV. Được thiết kế cho các nhiệm vụ khảo sát và lập bản đồ có độ chính xác cao, LandStar7 cung cấp khả năng quản lý quy trình làm việc liền mạch, giao diện người dùng đồ họa dễ học và dễ sử dụng để hoàn thành tất cả các dự án của bạn một cách hiệu quả. Các định dạng nhập và xuất dữ liệu toàn diện, nhiều phương pháp đo lường đảm bảo năng suất tức thì.<br /> <br /> - Hỗ trợ nhiều loại định dạng nhập và xuất khác nhau LandStar7 nhập và xuất DXF, DWG, SHP, KML, KMZ, CSV, DAT, TXT cũng như nội dung dữ liệu được tùy chỉnh đầy đủ từ dự án khảo sát lựa chọn các định dạng CSV, DAT và TXT.<br /> <br /> - Xác định vị trí và trực quan hóa dữ liệu dự án của bạn trong nháy mắt LandStar7 tích hợp bản đồ trực tuyến của Google, OSM, BING và WMS để cung cấp thông tin vị trí có ý nghĩa cho các nhà khảo sát và chuyên gia xây dựng. Các dự án được hiển thị trong địa hình khu vực hoặc hình ảnh vệ tinh trong thời gian thực.<br /> <br /> - Rất linh hoạt và sẵn sàng cho nhiều ứng dụng LandStar7 được thiết kế để cung cấp cho bạn các bộ tính năng đặc biệt, từ khảo sát đất đai, các dự án xây dựng và kỹ thuật, lập bản đồ, thu thập dữ liệu GIS, liên quan đến đường đến khảo sát đường ống.<br /> <br /> Giao diện người dùng có thể tùy chỉnh của nó giúp LandStar7 dễ sử dụng bằng cách tập trung vào các chức năng thiết yếu thường được sử dụng. Quy trình phát triển phần mềm linh hoạt Nhóm phát triển LandStar7 của chúng tôi giữ liên lạc thường xuyên với các nhà khảo sát, các chuyên gia xây dựng và mạng lưới đối tác trên toàn thế giới của chúng tôi để mang lại các chức năng vượt trội mới. Khi sử dụng LandStar7 ngay hôm nay, bạn được đảm bảo tận hưởng các tính năng mới thường xuyên mà không phải trả thêm phí.<br /> <br /> <strong>>>></strong> Trong bài viết bên dưới đây chúng tôi sẽ giới thiệu tới bạn cách cài đặt LandStar 7 trên máy tính (PC Windows & Mac). Phương pháp mà chúng tôi áp dụng là sử dụng Bluestacks, công cụ giả lập hệ điều hành Android hàng đầu hiện nay. Tất cả những gì bạn cần chỉ là một chiếc máy tính chạy Windows hoặc Mac.<br /> <br /> <strong>Bước 1:</strong> Tải xuống và cài đặt Bluestacks<br /> Tải phiên bản mới nhất tại đây <a href="https://www.bluestacks.com/vi/index.html" target="_blank">https://www.bluestacks.com/vi/index.html</a>. Trang web này hỗ trợ tiếng Việt nên bạn có thể dễ dàng tải về file cài đặt của Bluestacks. Quá trình tải về có thể mất vài phút.<br /> Sau khi tải về, nhấp chuột vào file bạn mới tải xuống để bắt đầu quá trình cài đặt. Giao diện cài đặt rất đơn giản, quá trình cặt đặt sẽ diễn ra nhanh chóng. Nếu có bất cứ vấn đề gì bạn có thể vào mục hỏi đáp của Bluestacks để tham khảo cách xử lý.<br /> <br /> <strong>Bước 2:</strong> Tải xuống file cài đặt của LandStar 7 cho máy tính PC Windows<br /> File cài đặt này có đuôi là .APK. APK là viết tắt của cụm từ tiếng Anh "Android application package" (tạm dịch là bộ cài đặt ứng dụng cho hệ điều hành Android). Bạn có thể tải về file apk này từ trang web của chúng tôi <a href="https://drive.google.com/file/d/1vSHDZvVz9EjJtpVAeKgVzJaua3D-Wwf1/view?usp=sharing">TẠI ĐÂY</a>.<br /> <br /> <strong>Bước 3:</strong> Tiến hành cài đặt LandStar 7 bằng Bluestacks<br /> Tập tin APK của LandStar 7 sau khi tải về có thể được cài đặt vào Bluestacks theo một trong các cách sau:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhấp đúp vào file APK, cách này đơn giản và nhanh nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuột phải vào file APK, chọn "Open With", sau đó chọn Bluestacks.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kéo thả file APK vào màn hình ứng dụng Bluestacks</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quá trình cài đặt LandStar 7 sẽ diễn ra nhanh chóng. Ngay sau khi quá trình cài đặt kết thúc, bạn sẽ thấy biểu tượng icon của LandStar 7 trên màn hình trang chủ của Bluestacks. Nhấp chuột vào biểu tượng icon này để bắt đầu sử dụng LandStar 7 trên máy tính PC Windows.</span></span><br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> ', 'images' => '2021080616092739e989a091af097f2762083a8ccfb10e.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23109', 'slug' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '225', 'rght' => '226', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '640', 'name' => 'iRTK4 Hi-Target - A Simple but not Simplistic GNSS System', 'code' => null, 'alias' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">iRTK4 Hi-Target là hệ thống thu GNSS thông minh đầy đủ tính năng được trang bị anten mới tích hợp đa kênh tiên tiến cho phép người dùng giải được các bài toán đo đạc một cách chính xác, đáng tin cậy. Tính năng Tilt-Surveying không cần hiệu chuẩn mà vẫn có thể thu thập dữ liệu ở nhiều nơi.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. RTK tiên tiến thế hệ mới<br /> <br /> Quản lý tín hiệu vệ tinh linh hoạt giúp bạn có được giải pháp chính xác hơn. Hiệu suất được cải thiện 20% trong môi trường GNSS đầy thử thách.<br /> <br /> 2.IMU (Biểu tượng)<br /> <br /> Bắt đầu ngay lập tức với công nghệ bù nghiêng không cần hiệu chuẩn, hỗ trợ bạn khảo sát nhanh chóng và chính xác hoặc xác định các điểm mà không cần cân bằng cột, Sai số dưới 3cm trong phạm vi nghiêng 45 °, tăng hiệu suất làm việc lên 20%.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/iRTK4(1).jpg" style="width: 383px; height: 131px;" /><br /> <br /> 3. Sạc nhanh<br /> <br /> Sạc pin của bạn lên đến 50 phần trăm chỉ trong 50 phút với bộ chuyển đổi 45W, nhờ khả năng sạc nhanh, bạn có thể sạc lại trong thời gian ngắn hơn.<br /> <br /> 4. Giao diện người dùng web (WEB UI)<br /> <br /> Cách nhanh chóng và hiệu quả để giám sát và điều khiển các thiết bị phần cứng. Ngoài ra, cung cấp quyền truy cập vào các tính năng được sử dụng phổ biến nhất thông qua trình duyệt web hiện có trên thiết bị bạn chọn — không cần tải xuống hoặc cài đặt bất kỳ thứ gì!<br /> <br /> 5. Smart Base<br /> <br /> Tối ưu hóa tuyệt vời cài đặt chế độ làm việc, Tự động ghép nối Base và Rover của bạn bằng dịch vụ toàn cầu Hi-target, mở rộng phạm vi công việc và tiết kiệm thời gian của bạn.<br /> <br /> Radio ngoài thế hệ mới<br /> <br /> HDL-460A cung cấp thông tin liên lạc dữ liệu đáng tin cậy cho các ứng dụng quan trọng trong đó yêu cầu sự kết hợp của sự ổn định, hiệu suất cao và phạm vi xa.<br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> </span></span>', 'images' => '20210805113424adf751172d9f3d7ddcf7e526d09e3fb6.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-05', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23795', 'slug' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '223', 'rght' => '224', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '639', 'name' => 'Thông số kỹ thuật của một số dòng máy toàn đạc điện tử Leica (cũ): TCR-403, TCR-405, TCR-407, TCR-705, TCR-802, TCR-805', 'code' => null, 'alias' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><font color="#323232">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ: </font><span style="line-height: 107%; letter-spacing: 0.1pt;">Leica TCR-802 Power, Leica TCR-805, Leica TC-705.</span></span></span> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> </h1> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="font-size: 17pt; line-height: 107%; font-family: Helvetica, sans-serif; letter-spacing: 0.1pt;"><o:p></o:p></span></h1> ', 'content' => '<p> <font color="#323232" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ:<br /> <br /> - </font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; line-height: 14.98px; letter-spacing: 0.1pt;">Leica TCR-802 Power<br /> - Leica TCR-805<br /> - Leica TC-705</span><br /> - <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica TCR 403, 405,407 Power</span></span><br /> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">I. Máy toàn đạc điện tử Leica TCR-802 Power</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 2”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/154253643_1379364745733010_5284105879190099443_o (1)(1).jpg" style="width: 480px; height: 360px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Máy toàn đạc điện tử Leica TCR-805</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 5”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/abaec5a286b071ee28a19.jpg" style="width: 480px; height: 640px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">III. Máy toàn đạc điện tử Leica TC-705</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Đo góc<br /> - Có độ chính xác là: ±5”<br /> - Cách đo: liên tục, đối tâm và tuyệt đối.<br /> 2. Hệ thống bù trục<br /> - 4 trục bù nghiêng<br /> - Dải bù nghiêng là : 4’<br /> - Có độ chính xác bù trục là: ±0.5”<br /> 3. Đo cạnh có gương<br /> - Khi đo bằng gương GPR1 là: 1.000m<br /> - Khi đo bằng gương GRZ4 là: 600m<br /> - Khi đo bằng gương mini GMP 101 là: 400m<br /> - Đối với gương giấy 60 x 60mm là: 250m<br /> - Có độ chính xác là: ±1mm + 1.5 ppm / 2.4 giây<br /> - Khi đo nhanh là: ±3 mm+1.5 ppm / 0.8s<br /> - Hiển thị là: 0.1 mm<br /> - Cách thức: Đổi pha với tia laze đỏ đồng trục, rõ rệt.<br /> 4. Đo cạnh không gương<br /> - PinPoint R200 là : 200m<br /> - Có độ chính xác là: ±2mm + 2 ppm / 3 giây<br /> 5. Ống kính<br /> - Có độ phóng đại ống kính là: 30 X<br /> - Độ mở ống kính là : 40mm<br /> - Dải điều quang: từ 1.7 m cho tới vô cùng<br /> 6. Dọi tâm<br /> - Kiểu dọi tâm: bằng tia laze<br /> - Có độ chính xác là: ±1mm tại 1.5 chiều cao máy<br /> 7. Màn hình, bàn phím<br /> - Được trang bị 01 Màn hình LCD rõ nét<br /> - Bàn phím gồm có chữ và số. Có chiếu sáng cho màn hình<br /> 8. Quản lý dữ liệu<br /> - Có bộ nhớ trong là: 10.000 điểm nhập cùng với điểm đo được<br /> - Truyền dữ liệu: GSI-Format via RS232<br /> - Trao đổi dữ liệu: GS116 / IDEX / GS18 / dxf<br /> 9. Pin của máy<br /> - Sử dụng Pin Lithium-Ion GEB 121,<br /> - Thời gian vận hành: từ 5 đến 8 tiếng<br /> 10. Trọng lượng<br /> - Đầu máy nặng: 5,6 kg<br /> 11. Khả năng chống nước và chống bụi<br /> - Đã đạt được tiêu chuẩn IP54<br /> - Có khả năng chịu độ ẩm lên đến 95%</span></span><br /> <br /> <h2> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IV. Máy toàn đạc điện tử Leica TCR-403; TCR-405; TCR-407</span></span></h2> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Dòng sản phẩm LEICA Total Station TPS400 Power (TCR403/405/407 Power) nổi bật với chế độ đo không gương (bằng tia laser) và laser chỉ hướng.</span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Thừa hưởng đầy đủ các tính năng của TPS400, TPS400 Power còn được tích hợp thêm khả năng đo xa bằng tia laser không cần gương, chỉ cần ngắm vào vật có độ phản xạ đủ cao (90%). Điều này đã giúp cho TPS400 Power năng động và tiện lợi hơn.</span><br /> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">1. Ống kính:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ phóng đại: 30 x<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trường nhìn : 1° 30’(1.66 gon) 26m tại khoảng cách 1km<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phạm vi điều tiêu: 1.7 m đến vô cùng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thể lưới: chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 2. Bộ nhớ, truyền dữ liệu:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ nhớ trong: 24.000 điểm ghi<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Định dạng dữ liệu: GSI / DXF / XML / ASCII/XLS/ Định dạng tự do<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 3. Bàn phím và màn hình<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Màn hình: 01 màn hình tinh thể lỏng LCD <a href="http://tracdiathanhdat.vn/gioi-thieu-cong-ty-cp-cn-va-tm-thanh-dat.htm" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;">160×280</a> pixel, đèn chiếu sang 5 cấp<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bàn phím tiêu chuẩn Alpha<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 4. Đo góc ( Hz, V)<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác (ISO 171233): 5”<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Hiển thị: 1” / 0.1 mgon / 0.01 mil<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phương pháp: tuyệt đối, liên tục, đối tâm<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ bù: tăng lên bốn lần sự bù trục<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác thiết đặt độ bù: 2”</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">5. Đo khoảng cách tới điểm phản xạ:</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Đo không gương (đo Laser RL): 170 m </span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Gương GPR1: 3500m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Tấm phản xạ (60mmx60mm): 250m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác/ Thời gian đo:<br style="margin: 0px; padding: 0px;" /> + Đo chính xác (Fine) : ±(5 mm+2 ppmD)/ 2.4 giây,<br style="margin: 0px; padding: 0px;" /> + Đo nhanh: ±(5mm+2ppmD)/0.8 giây,<br style="margin: 0px; padding: 0px;" /> + Đo đuổi: ±(5mm+2ppmD)/< 0.15 s<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 6. Hệ điều hành: Windows CE: 5.0 Core<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 7. Dọi tâm laser:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại : Điểm laser,chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác dọi tâm:1.5mm trên 1.5m chiều cao máy<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 8. Nguồn pin (GEB221):<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại: LithiumIon<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thời gian làm việc: hơn 20 h<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trọng lượng: 5.1 kg<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 9. Môi trường hoạt động:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Biên độ làm việc: từ -20°C tới +50°C<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Chịu nước và bụi (IEC 60529): IP55<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ ẩm: 95% không ngưng tụ</span></span><br /> </p> <table border="1" cellpadding="0" cellspacing="0" style="width:619px;" width="619"> <tbody> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu kỹ thuật </strong></span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>403</strong></span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>405</strong></span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>407</strong></span></span></td> </tr> <tr> <td colspan="3" style="width:499px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Độ góc (Hz, V)</strong></span></span></td> <td style="width:120px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương thức</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo liện tục tuyệt đối</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gốc hiển thị (bước nhảy)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″ / 0.1 mgon / 0.01 mil</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -3)</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3″ (1 mgon)</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5″ (1.5 mgon)</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7″ (2 mgon)</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Ống kính</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ số phóng đại</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">30x</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trưng nhìn</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1° 30′ (26 m at 1 km)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khỏang cách nhìn gần I</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưới chữ thập</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiếu sáng</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Bù nghiêng</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống bù nghiêng</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng 2 trục</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Setting accuracy</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5″</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2″</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Đo khoảng cách bằng tia hồng ngoại</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring range with circular prism GPR1</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring with reflective foil<br /> (60 mm x 60 mm)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">250m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -4)<br /> (fine/quick/tracking)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2mm + 2 ppm/5 mm + 2 ppm/5 mm + 2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">< 1 sec/< 0.5 sec/< 0.15 sec</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chính xác, nhanh, do liên tục.</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo khoảng cách không gương</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R100 (“power”) 170m (90 % reflective)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(Medium atmospheric conditions)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R300 (“ultra”) > 500 m (90 % reflective)<br /> Laser at GPR circular reflector 7’500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3mm+2 ppm/5 mm+2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">typ. 3 s/1 s</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kíck cỡ điểm với 100 m</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">12mm x 40 mm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu</strong></span></span></td> <td colspan="3" style="width:354px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ trong</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 Điểm đo</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao tiếp</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RS232</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng dữ liệu</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GSI/ASCII/dxf/Freely definable formats</span></span></td> </tr> </tbody> </table> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"> </span></span></span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="width: 250px; height: 100px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '202107301638040599a20d3fb57fe46b312b506c17e5cc.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử ', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-30', 'modified' => '2026-07-12', 'status' => '1', 'view' => '19533', 'slug' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '221', 'rght' => '222', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '638', 'name' => 'Những lỗi thường gặp ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m', 'code' => null, 'alias' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span>', 'content' => '<br /> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tham khảo một số lỗi và ý nghĩa của những lỗi này ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m</span></span><br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1565334829-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-dathop-02.jpg" style="width: 620px; height: 477px;" /><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp các lỗi trên hãy liên hệ với chúng tôi qua số hotline để được khắc phục nhé!<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/hotline(1).png" style="width: 250px; height: 100px;" /></span></span><br /> ', 'images' => '2021072917090604e0ee7f57cb99fce8677b2f946c35af.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình điện tử', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-29', 'modified' => '2026-07-12', 'status' => '1', 'view' => '14983', 'slug' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '219', 'rght' => '220', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '637', 'name' => 'So sánh giữa Garmin GPSMAP 66S vs GPSMAP 64S', 'code' => null, 'alias' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tham khảo sự khác nhau giữa hai dòng máy định vị GPSMAP 66s và 64s của hãng Garmin và những ưu điểm vượt trội mà Garmin đã mang tới cho dòng máy GPSMAP 66s nhé.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>GPSMAP 66s</strong>: Thiết bị cầm tay đa vệ tinh tích hợp cảm biến.</span></span><br /> <br /> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">GPSMAP 64s</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">: </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);">Độ nhạy máy thu cao, thiết bị có thể cùng lúc nhận được tín hiệu vệ tinh từ hai hệ thống GPS và GLONASS. GPSMAP 64s</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);"> kèm theo khí áp kế để đo cao độ, la bàn điện tử, kết nối USB tốc độ cao, hỗ trợ khe cắm thẻ nhớ, đồng thời có khả chia sẽ dữ liệu bằng Wireless với các thiết bị Garmin tương thích khác.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/So sánh GPS 66 và 64.jpg" style="width: 690px; height: 459px;" /><br /> <br /> <br /> <u><strong>>>> Cùng so sánh thông số kỹ thuật của hai dòng máy GPSMAP 66s và 64s:</strong></u></span></span><br /> <br /> <br /> <table border="1" cellpadding="0" cellspacing="0"> <tbody> <tr> <td style="width:161px;"> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 66s</strong></span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 64s</strong></span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước tổng thể:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.2 x 16.3 x 3.5cm</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.1 x 16 x 3.6cm</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3 inches</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.6 inches</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ phân giải màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">240 x 400p (pixel)</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">160 x 240p (pixel)</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ khả năng:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">16GB</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4GB</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Waypoint/Routes/ Tracklog:</span></span></td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">20000 Điểm, 250 GPX Track và 300 điểm được lưu</span></span></td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 điểm, 200 điểm được lưu</span></span></td> </tr> </tbody> </table> <br /> <ul> <li> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Theo dõi hoạt động thời tiết </span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tải xuống hình ảnh vệ tinh trực tiếp (không đăng ký)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chắc chắn theo tiêu chuẩn MIL-STD 810G cho hiệu suất nhiệt, sốc và nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhật ký Rinex</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối WiFi / Bluetooth</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Thiết kế phần cứng</strong><br /> Từ góc độ thiết kế, cả hai thiết bị đều cực kỳ giống nhau, với một vài khác biệt nhỏ về kích thước và màn hình<strong>. </strong>GPSMAP 66S có kích thước tổng thể lớn hơn một chút, nhưng sự khác biệt là gần như không thể nhận ra. Ngoài những thay đổi trực quan rõ ràng, họ cảm thấy khá giống với mẫu cũ. Những thay đổi khác là các nút nhỏ gọn hơn một chút nhưng rộng hơn. Các chức năng của nút giống nhau mặc dù phiên bản GPSMAP 66s có menu khác.<br /> <br /> Nút nguồn được đặt ở phía trên của thiết bị. Vị trí trên GPSMAP 64 có vẻ được ưu thích hơn vì bật / tắt dễ dàng nhưng bạn có thể hiểu lý do tại sao Garmin muốn thực hiện thay đổi này vì nó ít có khả năng bị hỏng khi bật thiết bị và lãng phí điện năng của bạn.<br /> <br /> Khác với những thay đổi đó và màn hình lớn hơn một chút, tất cả các cổng đều giống nhau, mặc dù Garmin đã thay đổi dây nguồn / dữ liệu thành MicroUSB. Khe cắm thẻ Micro SD có thể bên dưới pin.<br /> <br /> <strong>Tuổi thọ pin</strong><br /> Cả hai thiết bị đều hoạt động trên hai pin AA và tuổi thọ thông thường sẽ là 16 giờ mặc dù điều đó chủ yếu phụ thuộc vào chức năng ứng dụng và sử dụng GPS của bạn. GPSMAP 66 mới cũng có chức năng "<strong>Expedition"</strong> , giúp tăng đáng kể thời lượng pin của thiết bị bằng cách hạn chế các chức năng phần mềm tự động như điểm theo dõi, thời gian hiển thị và vào chế độ năng lượng thấp.<br /> <br /> <strong>Cách bật chế độ Expedition trên GPSMAP 66s</strong><br /> <br /> Chuyển đến menu chính của thiết bị> Chọn <strong>Cài đặt</strong> > Chọn "<strong>Expedition"</strong> . Sau đó, bạn sẽ được yêu cầu chọn "<em>Tự động, Nhắc hoặc Không bao giờ</em>".<br /> Chọn <em>Tự động</em> sẽ tự động đặt thiết bị sang chế độ thám hiểm sau hai phút hoạt động.<br /> Chọn <em>Nhắc </em>có nghĩa là lần sau khi bạn tắt thiết bị, nó sẽ yêu cầu bạn bật chế độ thám hiểm thay vì tắt.<br /> Chọn <em>Không bao giờ</em> sẽ tắt bất kỳ hình thức chế độ thám hiểm nào bạn đã chạy (Nhắc hoặc Tự động).<br /> <br /> <strong>Các tính năng phần mềm khả dụng trên cả hai thiết bị</strong><br /> Cả hai thiết bị đều có thể ghi lại các điểm / tuyến đường và nhật ký theo dõi, mặc dù GPSMAP 66s có thể ghi lại nhiều hơn.<br /> <br /> Một số tính năng của cả hai dòng máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính diện tích trên các thiết bị (chỉ cần đi bộ chu vi của khu vực).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tải bản đồ tùy chỉnh - bạn có thể tải bản đồ tùy chỉnh tương thích với các thiết bị của Garmin (Garmin Topo hoặc thậm chí City Nav Maps). Nếu bạn tải một trong hai bản đồ này, thì bạn sẽ có quyền truy cập vào chức năng định tuyến tự động trên thiết bị. * Bạn cần sử dụng bản đồ Topo bản FULL để định tuyến.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Geocaching thân thiện - ứng dụng Geocaching được tải sẵn trên các thiết bị, mặc dù vậy bạn cần phải đăng ký thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lịch săn / cá - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin Mặt trời và Mặt trăng - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng xem ảnh </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Kết nối GARMIN</strong><br /> <br /> Garmin Connect - khả dụng trên cả hai thiết bị cho phép thông tin hoạt động được gửi đến tài khoản kết nối Garmin của bạn và cho phép các tính năng được kết nối với điện thoại thông minh của bạn. Các tính năng được kết nối bao gồm Thông báo điện thoại, LiveTrack, GroupTrack.<br /> <br /> <strong>Chức năng cảm biến</strong><br /> Cả hai thiết bị GPS cầm tay trên đều có thể đo độ cao áp kế, la bàn bù 3 trục nghiêng. Việc đo độ cao áp kế sẽ có thể cung cấp cho bạn thông tin về những thay đổi của điều kiện thời tiết (giả sử bạn vẫn ở cùng độ cao) mặc dù nó cần phải được hiệu chỉnh đầy đủ. Cảm biến này cũng có thể được sử dụng để đo lường thay đổi độ cao của bạn và thậm chí đo lường thay đổi độ dốc AVG khi nhìn vào dữ liệu điểm của bạn.<br /> <br /> <strong>>>> Các tính năng phần mềm CHỈ khả dụng trên GPSMAP 66s:</strong><br /> <br /> - Tương thích với ứng dụng khám phá của Garmin - Sau khi được kết nối với ứng dụng điện thoại thông minh của bạn, ứng dụng khám phá của Garmin sẽ tự động đồng bộ hóa và chia sẻ điểm tham chiếu, tuyến đường và tuyến đường với thiết bị của bạn. Bạn cũng có thể tải bản đồ về điện thoại thông minh của mình để truy cập ngoại tuyến.<br /> <br /> - Theo dõi hoạt động thời tiết <br /> Garmin đã tăng thông tin thời tiết của họ một cách đáng kể với lần lặp này. Bây giờ bạn có thể nhận được rất nhiều dữ liệu thời tiết dựa trên thông tin dự báo thời gian thực. Họ có các tùy chọn bản đồ dự đoán riêng biệt về nhiệt độ, gió, mưa và mây. Nó cũng cung cấp radar thời tiết trực tiếp để bạn sẵn sàng thay đổi kế hoạch nếu bạn sắp bị bắt. Tính năng này không phụ thuộc vào kết nối Bluetooth hoạt động với điện thoại thông minh của bạn có bộ phận tiếp nhận. <br /> Hình ảnh vệ tinh hoạt động chính xác giống như trên loạt GPSMAP 64s nhưng bạn không còn phải trả tiền cho nó nữa.<br /> <br /> - Điểm mới của dòng GPSMAP 66s là khả năng tương thích với cửa hàng Connect Connect của Garmin, về cơ bản là 'App Store' của Garmin. <br /> <br /> - Chức năng InReach Remote: bạn có thể điều khiển thiết bị inReach mini của mình.<br /> <br /> - Đèn pin và SOS <br /> Một tính năng độc đáo khác là <strong>đèn pin LED</strong> rất sáng và<strong> đèn hiệu SOS</strong> có thể được sử dụng để báo hiệu sự giúp đỡ. Chức năng SOS chỉ là một nét khẩn cấp. Tuy nhiên, bạn cũng có thể đặt đèn pin nhấp nháy trong khoảng 1-9 lần mỗi giây.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp.jpg" style="width: 250px; height: 100px;" /><br /> <br /> </span></span>', 'images' => '202408021508551192007d993f13fc9de7ce32bd9bab16.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy định vị GPS cầm tay Garmin', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-28', 'modified' => '2026-07-12', 'status' => '1', 'view' => '27644', 'slug' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '217', 'rght' => '218', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '636', 'name' => 'Máy thuỷ bình kỹ thuật số Leica LS10 và LS15', 'code' => null, 'alias' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span></span>', 'content' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10, LS15 có thể làm việc liên tục nhiều giờ, độ sai lệch gần như tuyệt đối không ảnh hưởng tới độ chính xác kết quả đo.<br /> <br /> Leica LS10, LS15 thường được dùng để đo chênh cao, đo khoảng cách với yêu cầu độ chính xác cao tuyệt đối. Máy có thể dẫn cao độ phục vụ cho vẽ thành lập bản đồ.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> Tính linh hoạt </span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dòng máy thủy bình Leica LS10, LS15 được thiết kế để khảo sát, thực hiện san lấp mặt bằng thường xuyên trên các công trường xây dựng, kiểm tra hoặc giám sát các tòa nhà, đường sắt hoặc đường bộ. Với Leica LS10, LS15 bạn luôn có sẵn công cụ làm việc phù hợp.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác và độ tin cậy cao nhất</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bạn sẽ nhận được kết quả đáng tin cậy và chính xác ngay. Chất lượng quang học hàng đầu của Leica Geystems luôn mang lại hình ảnh có độ tương phản cao và giúp việc đọc chính xác và dễ dàng ngay cả trong điều kiện ánh sáng không thuận lợi. Do sự ổn định nhiệt độ cao, Leica LS10, LS15 luôn mang lại kết quả đáng tin cậy không ảnh hưởng bởi bức xạ mặt trời trực tiếp.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chăm sóc khách hàng chỉ với một cú nhấp chuột.</strong> </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông qua <a href="https://leica-geosystems.com/services-and-support/customer-support-services/active-customer-care">ACTIVE CUSTOMER CARE</a> - một mạng lưới toàn cầu gồm các chuyên gia giàu kinh nghiệm bạn sẽ được hướng dẫn một cách thành thạo mọi vấn đề:<br /> - Loại bỏ sự chậm trễ với dịch vụ kỹ thuật cao cấp<br /> - Hoàn thành công việc nhanh hơn với hỗ trợ tư vấn tuyệt vời<br /> - Tránh các lần truy cập trang web tốn kém với dịch vụ trực tuyến để gửi và nhận dữ liệu trực tiếp từ hiện trườn</span></span>g.<br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cài đặt nhanh chóng và thuận tiện</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả và giảm thời gian làm việc với Leica LS10, LS15. Sử dụng núm lấy nét để cài đặt nhanh chóng. Chuyển động tốt mang lại một hình ảnh hoàn hảo. LS10 & LS15 cung cấp cho bạn một mức độ bảo mật cao!</span></span><br /> <br /> <br /> <iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="394" src="https://www.youtube.com/embed/lBe6-DiokBQ" title="YouTube video player" width="700"></iframe>', 'images' => '20221227151040ffcdeffa3829f4a633ea0b404e2b4a0a.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình Leica', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '26500', 'slug' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '215', 'rght' => '216', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '635', 'name' => 'Ống nhòm và những lưu ý khi mua ống nhòm', 'code' => null, 'alias' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tìm hiểu về ống nhòm và tham khảo một số lưu ý khi chọn ống nhòm!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Ống nhòm là gì?</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm, còn gọi là ống ngắm hay con mắt xa, là một hệ hai kính viễn vọng quang học được gắn cạnh nhau và cùng hướng, cho phép người quan sát đặt cả hai mắt để quan sát các vật ở xa. Cấu tạo gồm vật kính, thị kính và thường có thêm hệ thống lăng kính. Vật kính bao gồm một thấu kính hội tụ, thị kính là thấu kính hội tụ có tiêu cự nhỏ nhất nhưng sẽ làm hình ảnh bị ngược nên cần thêm lăng kính đảo ảnh.<br /> <br /> * Cấu tạo ống nhòm gồm một hệ thống hai thấu kính hội tụ đặt đồng trục.</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vật kính L1: tiêu cự f1 rất dài (vài m)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thị kính L2: tiêu cự f2 ngắn (vài cm) và được sử dụng như kính lúp</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách giữa thị kính và vật kính thay đổi được.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Cấu tạo ống nhòm.png" style="width: 300px; height: 383px;" /><br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Tìm hiểu về các thông số về ống nhòm</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thường ta hay nhìn thấy ký hiệu 7×50, 8×40, 10×42, 15×70, 25×100… ở trên các ống nhòm. Hai chữ số này nói lên điều gì?<br /> <br /> <u>Ví dụ</u>: <span style="color:#000000;"><span style="text-align: justify;">Ống nhòm Nikon MONARCH 7 10x42</span></span><br /> <br /> <strong>10</strong> - số đằng trước dấu nhân (x) sẽ là độ phóng đại của ống nhòm đó (tức là 10 lần).<br /> <strong>42</strong> - số đằng sau dấu nhân sẽ là đường kính của vật kính ống nhòm theo đơn vị millimet ( tức là 42mm).<br /> <br /> Thông số độ phóng đại có nghĩa là bạn sẽ nhìn vật đó gần lại bạn 10 lần theo tỉ lệ xấp xỉ 1/10. Có nghĩa là bạn nhìn một vật xa 1km bằng ống nhòm, thì khi đó như bằng mắt thường bạn nhìn 100m.<br /> <br /> Nhiều bạn hay thắc mắc một câu hỏi khi mua ống nhòm: <strong>ống nhòm này nhìn bao xa?</strong> Thực chất cái xa vô cùng mà mình nói ở đây nó là một vật đủ lớn mà khi nhìn qua ống nhòm chúng ta có thể thấy nó và nhìn được hình dạng của nó. Điều quan trọng mà các bạn hay bỏ quên đó là ”chất lượng ảnh như thế nào?” thì rất ít bạn quan tâm. Đây là điều quan trọng để đánh giá một chiếc ống nhòm tốt hay không?</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường kính vật kính là thông số được tính bằng đơn vị mm. Nếu vật kính càng lớn thì khả năng thu sáng và chất lượng ảnh của bạn sẽ càng tốt và ngược lại. Tuy nhiên nếu mà lớn quá thì một trong những nhược điểm đó là ảnh quan sát thu được sẽ bị sai sắc (là điều không thể tránh khỏi). Bởi vậy khi lựa chọn mua ống nhòm thì các bạn nên chọn sao cho phù hợp với độ phóng đại ống nhòm mà mình mong muốn. Ví dụ 7×50, 8×40, 10×42, 10×50, 12×60, 15×70…</span></span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Xuất xứ tất cả các loại ống nhòm hiện nay</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm hiện nay có ba nguồn gốc xuất xứ chính, đó là tự lực sản xuất sản phẩm, OEM và ODM. Vậy những khái niệm này là gì?</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Những sản phẩm đến từ các thương hiệu tự lực sản xuất có nghĩa là ống nhòm của thương hiệu này được thiết kế và gia công bởi chính một đơn vị. Tuy nhiên hiện nay có khá ít thương hiệu có thể tự lực sản xuất được mà không nhờ bên thứ ba. Đối với những sản phẩm được tự lực sản xuất này thì sẽ mang đậm dấu ấn của thương hiệu và không bị ảnh hưởng bởi các yếu tố kỹ thuật từ các bên. Tuy nhiên những chiếc ống nhòm được tự lực sản xuất có giá thành khá cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm <strong>OEM</strong> là những chiếc ống nhòm được công ty chủ chủ quản thiết kế nhưng lại không trực tiếp gia công, mà phải nhờ đến một bên thứ 3. Đơn vị gia công sẽ hoàn thiện sản phẩm dựa trên bản thiết kế và chịu sự kiểm soát chất lượng từ đơn vị chủ quản thiết kế. Với hình thức này thì sản phẩm thường có giá thành rẻ hơn nhưng về dấu ấn thương hiệu của sản phẩm thì không nổi bật nhiều.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Và hình thức cuối cùng là sản phẩm <strong>ODM</strong>, những sản phẩm ống nhòm thường đến từ các thương hiệu có khả năng kinh doanh nhưng không có khả năng thiết kế hay gia công sản phẩm. Ống nhòm của những thương hiệu này sẽ được đặt thiết kế và gia công ở một đơn vị nào đó và in thương hiệu của mình lên.</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc xác định được nguồn gốc của sản phẩm cũng là cách chọn mua ống nhòm mà bạn nên lưu tâm. Mỗi thương hiệu đều có một ưu nhược điểm riêng, tùy vào nhu cầu bạn có thể lựa phương thức sản xuất phù hợp.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Phân loại các loại ống nhòm hiện nay theo chức năng</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường có rất nhiều loại ống nhòm khác nhau, dưới đây là một số loại ống nhòm phố biến được nhiều người lựa chọn nhất.<br /> - <strong>Ống nhòm mini</strong> là loại ống nhòm có kích thước gọn nhẹ đến bất ngờ, tuy nhiên tầm nhìn thì hơi hạn chế. Loại ống nhòm này có kích thước rất nhỏ nên có thể bỏ trong balo, túi xách để mang theo bên người, trong các chuyên tham quan, thám hiểm, du lịch.<br /> - <strong>Ống nhòm ban đêm</strong> là loại ống nhòm có khả năng nhìn xuyên bóng tối nhờ được trang bị đèn hồng ngoại. Hình ảnh nhìn được trong bóng tối qua ống nhòm hồng ngoại thường không màu. Ngoài ra, loại ống nhòm hồng ngoài ngày còn được tích hợp tích năng ghi hình, chụp ảnh.<br /> - <strong>Ống nhòm chụp ảnh</strong> là loại ống nhòm được tích hợp thêm chức năng bắt lại những khoảnh khắc đẹp khi chúng ta quan sát. Tuy nhiên, vì không phải là thiết bị chuyên về chụp ảnh nên hình ảnh chụp được có chất lượng còn hạn chế.<br /> - <strong>Ống nhòm đo khoảng cách</strong> là loại ống nhòm ngoài việc quan sát một đối tượng thì còn đo được khoảng cách từ chỗ chúng ta đứng đến vật thể. Ngoài ra, loại ống nhòm này còn được tích hợp tính năng đo góc, đo chiều cao<br /> - <strong>Ống nhòm nhiệt</strong> loại ống nhòm hiện đại có khả năng hiển thị thân nhiệt của đối tượng bạn đang quan sát, cũng như phân biệt được đối tượng với môi trường xung quanh nhờ sự chênh lệch nhiệt độ.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Một số lưu ý khi chọn ống nhòm phù hợp với nhu cầu</strong></span></span></h2> <p> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.1 Kích thước ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ống nhòm có kích thước lớn Full-Size (8x42, 10x50)<br /> Các dòng ống nhòm có kích thước lớn thường thu nhận ánh sáng tốt hơn, có thể xem và quan sát trong điều kiện ánh sáng yếu như lúc bình minh hay hoàng hôn. Các ống nhòm này sẽ cung cấp cho bạn cái nhìn rộng lớn về quang cảnh phía trước, thích hợp cho ngắm chim, động vật hoang dã,... nhưng ngược lại kích thước của chúng lại lớn và thường rất nặng.<br /> <br /> - Ống nhòm có kích thước trung bình Mid-Size (7x40, 16x32, 10x42)<br /> Các dòng ống nhòm có kích thước trung bình thường được sử dụng cho ngắm cảnh thiên nhiên, cho các hoạt động du lịch dã ngoại hoặc sử dụng để quan sát các buổi biểu diễn, xem các trận bóng đá,... Ống nhòm này có kích thước vừa phải, khả năng quan sát tốt, trọng lượng phù hợp với mọi người. Tuy nhiên mức độ truyền dẫn ánh sáng lại không được bằng ống nhòm có kích thước lớn.<br /> <br /> - Ống nhòm có kích thước nhỏ gọn - ống nhòm mini (6x18, 8x21)<br /> Các loại ống nhòm này thường thích hợp để sử dụng cho các hoạt động ban ngày. Đây là loại ống nhòm có kích thước nhỏ gọn, cầm vừa tay, thoải mái khi sử dụng trong thời gian dài.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/genmedia_PIC1739447_RL_02_w1500_h1500_c217224230255(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.2 Độ phóng đại của ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi ống nhòm thường được xác định bởi hai cặp số. Số đầu tiên chỉ độ phóng đại của ống nhòm và số thứ 2 thể hiện đường kính vật kính của ống nhòm. Ở đây ta thấy đối với ống nhòm có độ phóng đại lớn hình ảnh quan sát được sẽ càng gần hơn. Tuy nhiên, nếu bạn chọn ống nhòm có độ phóng đại quá lớn, ống nhòm siêu zoom thì kích thước lớn sẽ làm tăng độ rung khi tay bạn cầm không chắc dẫn đến hiện tượng mỏi mắt.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.3 Đường kính ống kính mục tiêu rộng</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giống như độ phóng đại, thông số thứ 2 của ống nhòm là về đường kính ống kính vật kính. Đường kính ống kính càng rộng cho phép tiếp nhận càng nhiều ánh sáng hơn. Khi nhiều ánh sáng bạn sẽ quan sát thấy hình ảnh tươi sáng hơn đặc biệt là trong điều kiện ánh sáng yếu như hoàng hôn hay lúc bình minh.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ong-nhom-hong-ngoai-2-mat-co-ghi-hinh-4x50mm-equinox-z_2253.png" style="width: 420px; height: 329px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.4 Thoát sinh học - Exit Pupil</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ thoát sinh học cho biết ảnh, độ sáng của vật thể khi đang quan sát. Nếu thông số này lớn sẽ làm cho hình ảnh quan sát được rõ nét hơn, tươi sáng hơn. Cách tính toán thông số này bằng cách lấy đường kính phóng đại chia cho độ phóng đại của ống kính. Nếu thông số này nằm ở ngưỡng 7 thì đó là ống kính tốt có thể lựa chọn để quan sát các vật trong ánh trời sáng trăng, lúc ánh sáng yếu, ở ngưỡng 5mm hoặc cao hơn sẽ thích hợp cho quan sát ban ngày hoặc ánh sáng yếu.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.5 Khoảng cách đặt mắt - Relief Eye</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Relief Eye là khoảng cách đặt mắt giữa thị kính tới mắt của bạn sao cho khả năng quan sát tốt nhất thoải mái nhất. Khoảng đặt mắt càng lớn bạn lại càng phải đưa ống nhòm ra xa hơn so với mắt mình, nhưng lại tốt đối với những người đeo kính (đối với những người đeo kính nên chọn thông số này là 11mm hoặc cao hơn).<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.6 Trường nhìn</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trường nhìn là thông số cho phép bạn biết độ rộng khu vực mình muốn quan sát tại khoảng cách 1000m từ nơi bạn đang đứng. Trường nhìn rộng để quan sát thiên nhiên, quan sát động vật, trường nhìn hẹp giúp quan sát các đối tượng ít di chuyển.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/nikon-coolshot-40-i-4(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.7 Hệ thống lấy nét</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm thường được trang bị hệ thống lấy nét ở trung tâm cho cả hai mắt, hoặc điều chỉnh diop trên cả hai mắt. Việc điều chỉnh diop trên hai mắt giúp bù đắp những hạn chế về thị lực giữa hai mắt của bạn.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.8 Lớp phủ thấu kính</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm giá rẻ thường không được tráng phủ nhiều lớp ra vậy cảm giác nhìn qua ống nhòm này thường mờ và không rõ nét. Lớp phủ thấu kính giúp giảm sự phản xạ ánh sáng và tăng khả năng truyền dẫn ánh sáng.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.9 Khả năng chống nước và kháng thời tiết</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng chống nước trên ống nhòm có thể là khả năng chịu nước, khả năng chống thấm, khi sử dụng ở điều kiện thời tiết thay đổi, nhiệt độ thay đổi.<br /> Các loại ống nhòm du lịch thường được trang bị khả năng chống nước mưa, ống nhòm quân sự, ống nhòm hải quân có thể được trang bị thêm khả năng chịu được áp lực nước hoặc nổi trên mặt nước.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.10 Khả năng chống đọng sương</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm giá rẻ thường bị mờ sương khi di chuyển qua lại giữa các vùng có nhiệt độ khác nhau. Mờ sương gây nhiều phiền toái cho bạn, thậm chí có thể làm hỏng ống nhòm nếu không loại bỏ độ ẩm đó ra khỏi ống nhòm.<br /> Hiện nay, các ống nhòm chuyên dụng, ống nhòm cao cấp đã được bơm các loại khí trơ, khí nitor bên trong ống nhòm để tránh gây hiện tượng ngưng tụ hơi nước. Điều này giúp bảo vệ ống nhòm của bạn tránh đọng sương lên bền mặt ống kính.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Địa chỉ mua ống nhòm/ ống nhòm đo khoảng cách uy tín</span></span></h2> <p id="2-dia-chi-mua-thiet-bi-may-bay-khong-nguoi-lai-uav-uy-tin" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại ống nhòm/ ống nhòm đo khoảng cách của các hãng Leica, Nikon, Barska, Garmin, Terrinox, Steiner, SNDWAY, ... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="color: rgb(51, 51, 51); text-align: justify;"> </span><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"> </span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span><br /> ', 'images' => '20210714155415df03af942339bf722676fd2f752f2a1f.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'ống nhòm đo khoảng cách', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-14', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24581', 'slug' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '213', 'rght' => '214', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '634', 'name' => 'Phụ kiện trắc địa', 'code' => null, 'alias' => 'phu-kien-trac-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Phụ kiện trắc địa là gì?</span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hầu hết những phụ kiện trắc địa đều thiết kế có thể tách rời với máy, phòng trong những trường hợp bị hư hỏng, chỉ phải thay thế phụ kiện mới. Điều này khiến cho việc lắp ráp phụ kiện cũng như sử dụng các máy trắc địa được linh hoạt với mọi trường hợp.<br /> Phụ kiện đo đạc, trắc địa bao gồm nhiều loại khác nhau ứng dụng cho các thiết bị đo đạc ( máy thủy bình, máy kinh vĩ điện tử, máy toàn đạc điện tử, máy định vị GPS) như: thước thép, bật mực, đế dọi tâm, thước đẩy bánh xe, mốc sứ, thùng máy, gương sào, đế dọi tâm, chân mia, dây cáp, pin sạc,…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/PHỤ KIỆN TRẮC ĐỊA(2).png" style="width: 680px; height: 544px;" /></span></span></p> <p style="text-align: center;"> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lưu ý khi lựa chọn phụ kiện trắc địa</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải đảm bảo phù hợp với cấu tạo của máy, chức năng của máy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải cùng hãng sản xuất hoặc phải là sản phẩm chính hãng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải phù hợp với công suất của máy, tránh trường hợp chọn phụ kiện có công suất thấp hoặc lớn hơn công suất thực của máy gây hư hỏng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải có cấu tạo tính năng tương đồng với từng đời máy</span></span></li> </ul> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Phụ kiện máy(2).jpg" style="width: 620px; height: 803px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Địa chỉ mua phụ kiện trắc địa uy tín</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại phụ kiện trắc địa: chân máy toàn đạc, chân máy thủy bình, mia 5m, mia Invar, sào gương, pin máy toàn đạc, sạc pin máy toàn đạc, đế máy, cáp trút số liệu,... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> </span><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 145 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"> </span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span></span></span>', 'images' => '20211207150823dc9ff8b8d2712352c76fd4e56030baca.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Phụ kiện trắc địa', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-12', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24887', 'slug' => 'phu-kien-trac-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '211', 'rght' => '212', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '632', 'name' => 'Một số lưu ý khi chọn mua máy bộ đàm', 'code' => null, 'alias' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng chúng tôi tham khảo một số lưu ý để lựa chọn cho mình một chiếc bộ đàm phù hợp nhé!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Lựa chọn băng tần sử dụng</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm cầm tay và máy bộ đàm cố định có 2 loại băng tần là VHF (136 – 174MHz) và UHF (400 – 527MHz).<br /> <br /> Nếu mua thêm để dùng chung với máy có sẵn, phải xác định máy bộ đàm đang dùng là loại băng tần nào (VHF hay UHF) và model là gì. Trong trường hợp đây là lần đầu tiên mua bộ đàm và chỉ có nhu cầu dùng chúng với nhau thì người dùng có thể chọn loại băng tần nào cũng được. Tùy thuộc vào địa hình, khu vực sử dụng và để đảm bảo liên lạc xa nhất, tốt nhất bạn nên chú ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ở vị trí khu vực trống trải, ít vật cản nên chọn băng tần VHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại khu vực nhà cao tầng, nhiều công trình dân dụng, trong thành phố nên chọn tần số UHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cũng cần lưu ý đến khả năng được cấp phép sử dụng tần số tại vùng sử dụng bộ đàm.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Lưu ý:</strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách liên lạc tối đa giữa hai máy cầm tay tại khu vực trống trải là khoảng 3km, trong thành phố không quá 2km. Những vị trí càng đông dân cư, càng nhiều công trình kiến trúc. Mật độ dân cư đông thì cự ly sẽ rút ngắn lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ đàm cầm tay có thể liên lạc với trung tâm của mình ở cự ly xa hơn so với cự ly giữa 2 máy cầm tay. Điều kiện là máy tại trung tâm phải có công suất lớn. Và anten đặt trên cột cao (càng cao thì liên lạc càng xa).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu muốn tăng cự li liên lạc giữa các máy với nhau, có thể chọn dùng Repeater (Bộ lặp) với anten lắp trên cao.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><img alt="" src="/admin/webroot/upload/image/images/1534383704-bodam_02.jpg" style="width: 480px; height: 360px;" /></strong></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Lựa chọn dòng máy phù hợp</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tùy thuộc vào khả năng tài chính cũng như nhu cầu mà lựa chọn dòng máy phù hợp. Trên thị trường hiện nay có khá nhiều thương hiệu máy bộ đàm. Nổi bật hơn cả là các dòng máy đến từ thương hiệu Motorola, Icom và Kenwood. Các dòng sản phẩm khác được đánh giá là có độ bền kém hơn, chất lượng thu phát cũng không tốt bằng.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu dùng cho công trường xây dựng hay dịch vụ bảo vệ thì nên chọn loại có cấu hình trung bình. Motorola CP1100, CP1300, GP3188 loại không bàn phím với khả năng kháng nước, chống bụi, chống va đập tốt là một gợi ý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các công ty vận tải, vận chuyển hàng hóa/hành khách…thì có thể chọn máy bộ đàm gắn xe cố định như Motorola GM3188, GM338. Nếu công ty yêu cầu đảm bảo quản lý liên lạc tại nhiều khu vực địa lý có khoảng cách xa thì phải chọn dòng máy kĩ thuật số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Với bộ đàm dùng cho nhà hàng, khách sạn, khu công nghiệp thì nên chọn dòng máy bộ đàm cầm tay giá rẻ như Motorola MagOne A8, GP2000s, Kenwood TK-2107 hay Icom IC-F3003 đều được.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các đơn vị chuyên nghiệp mà yêu cầu sản phẩm cần phải đảm bảo an ninh để liên lạc thông suốt kể cả trong điều kiện thời tiết khắc nghiệt, môi trường phức tạp như Công an, Bộ đội, phục vụ công tác Phòng chống thiên tai, bão lũ, các công ty dầu khí…bộ đàm được lựa chọn phải là dòng chuyên nghiệp, chuyên dụng và hiệu suất cao\</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm phổ thông có giá thành tương đối rẻ, cấu hình vừa đủ đáp ứng những yêu cầu đơn giản. Vừa hài hòa về chi phí, vừa mang lại hiệu quả công việc. Trong khi đó, các dòng sản phẩm chuyên nghiệp thường có mức giá cao hơn với nhiều tính năng hơn.<br /> <br /> Có thể nói, dòng sản phẩm máy bộ đàm đến từ thương hiệu Motorola hiện đang đứng đầu về công nghệ (cả analog và digital). Nhờ vào ưu điểm là độ bền cao, khả năng chống chịu tốt cũng như cách vận hành đơn giản. Các dòng sản phẩm chuyên dụng có thể kể đến như Motorola GP3188, GP328, XiR P8200/8208, P8260/8268…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/business-radios-2021.png" style="width: 480px; height: 238px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2 style="box-sizing: border-box; margin-top: 0px; margin-bottom: 0.5rem; font-weight: 500; line-height: 1.2; font-size: 20px; color: rgb(68, 68, 68); font-family: Roboto, sans-serif;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; font-weight: 600;">3. Lựa chọn máy bộ đàm với những tính năng phù hợp</span></span></span></h2> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát RF: Máy cầm tay thường có công suất tối đa khoảng 5W, con số này càng cao thì cự ly liên lạc càng lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất âm thanh: Nếu sử dụng trong môi trường ồn ào, nhiều tiếng động. Thì nên chọn máy công suất lớn có bộ lọc âm thanh tốt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các tính năng bảo vệ: Máy được thiết kế với kết cấu vững chắc, theo tiêu chuẩn quân đội Mỹ (MIL-STD810), chống nước, chống nổ…</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mạch mã hóa và giải mã PL/DPL, CTCSS/DTCS: Tránh được những cuộc liên lạc không cần thiết khi nhiều người dùng chung 1 kênh tần số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng kích phát bằng giọng nói (VOX) để hoạt động khi rảnh tay</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng nhập tần số từ bàn phím của máy: Thường được trang bị ở các dòng máy phổ thông. Tuy vậy, tính năng này lại khiến người dùng vô tình làm sai tần số kênh đã đặt ra khiến máy bộ đàm không liên lạc được với máy khác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng bảo mật thông tin: Nhiều cấp bảo mật khác nhau như Voice Scramler, AES/DES…</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/MotorolaG3588.jpg" style="width: 480px; height: 480px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Chọn phụ kiện bộ đàm</strong></span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin bộ đàm</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên chọn pin dung lượng lớn, thời gian sử dụng lâu cho mỗi lần sạc. Pin cho máy bộ đàm nên từ 1000mAh – 2200mAh với thời gian hoạt động tối đa đến 19 giờ.<br /> Pin Li-Ion có dung lượng lớn và tuổi thọ pin cao có thể sạc bất cứ lúc nào mà không cần dùng hết trước khi sạc như các loại pin khác. Pin Ni-MH có dung lượng và tuổi thọ pin thấp hơn Li-Ion. Muốn pin sử dụng bền lâu thì không thể sạc nhồi mà phải dùng hết trước khi sạc lại. Trong trường hợp dùng lâu, để tránh bị hết pin bất ngờ, hãy mua thêm pin dự phòng để đảm bảo liên lạc được thông suốt.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ sạc</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu không có thời gian sạc pin lâu, hãy sử dụng bộ sạc nhanh, nhanh hơn bộ sạc chuẩn từ 3-5 giờ.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Loa – Micro và các loại tai nghe choàng đầu, áp cổ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo liên lạc kể cả khi đeo máy thường xuyên ở thắt lưng, trên cầu vai/gắn trên cổ áo. Phù hợp với những ai thường xuyên dùng tay cho những công việc khác như bảo an, nhân viên phục vụ…<br /> Tai nghe choàng đầu và bộ áp cổ khi dùng với máy có chức năng kích phát bằng giọng nói (VOX) sẽ giúp rảnh tay hoàn toàn khi liên lạc bằng bộ đàm. Bộ áp cổ sẽ giúp âm thanh gửi đi trong hơn, không có tiếng ồn kể cả khi đang nói trong khu vực nhiều tiếng ồn.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm của mỗi hãng khác nhau đều kèm theo anten tiêu chuẩn, cho cự li liên lạc tốt nhất. Loại cải tiến kích có thước ngắn hơn giúp máy gọn và đỡ vướng víu. Anten không phù hợp có thể làm hư hỏng máy. Do vậy, nếu cần một anten mới, hãy chọn đúng mã số của loại kèm theo máy.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/bo-dam-motorola-gp-3588-plus(1).jpg" style="width: 480px; height: 270px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ mua máy bộ đàm uy tín</span></span></h2> <p> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên phân phối các loại máy bộ đàm của các hãng Motorola, Kenwood, Icom, Hypersia,... lâu năm uy tín trên toàn quốc.</span></p> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> <span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span></span></span><br style="margin: 0px; padding: 0px;" /> </p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">@ Luôn đồng hành cùng bạn!</strong><span style="margin: 0px; padding: 0px;"> </span></span></span></p> ', 'images' => '20210709160653d0336e3b94fd76fc2ef669058d11917a.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'máy bộ đàm', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-09', 'modified' => '2026-07-12', 'status' => '1', 'view' => '15419', 'slug' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '209', 'rght' => '210', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $detailNews = array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $setting = array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ) $tin_ft = array( (int) 0 => array( 'Post' => array( 'id' => '588', 'name' => 'Hướng dẫn mua hàng', 'code' => null, 'alias' => 'huong-dan-mua-hang', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p> <span style="color:#000000;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> </span></span><span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="line-height: 107%;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></span></span> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="color:#000000;">Quý khách có thể mua hàng theo những cách sau:</span></span></span><br /> </p> <p> <span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Cách 1: </strong>Đặt hàng trực tiếp tại mục ĐẶT HÀNG (Thêm vào giỏ hàng) trên website: </span></span><span style="font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><a href="https://maytracdiasaoviet.vn/" target="_blank"><span style="color:#000000;">https://tracdiathanhdat.vn/</span></a></span></span><span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;">.</span></span></p> <p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngay sau khi tiếp nhận thông tin đặt hàng, nhân viên kinh doanh công ty sẽ gọi điện cho quý khách để xác nhận đơn hàng và tiến hành giao hàng cho quý khách ngay trong ngày.</span></span></span></p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Cách 2: </strong>Đặt hàng trực tiếp qua số hotline của công ty <br /> <br /> – Tại trụ sở Hà Nội: <strong>0913 051 734 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">– Tại VPGD Hồ Chí Minh:<strong> 0904 925 936 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Cách 3: </strong>Quý khách mua hàng trực tiếp tại địa chỉ sau:<br /> <br /> <strong>CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></span></span></span><br /> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 145 Láng Hạ, Phường Láng Hạ, Hà Nội</span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> </div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rất mong được hợp tác với Quý khách hàng trên cả nước.<br /> <br /> Trân trọng!</span></span></span></div> ', 'images' => '202104071220058398ebc1b9cf669cf602eb8040be387a.jpg', 'images_multi' => '', 'pos' => '1', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Máy trắc địa chính hãng | RTK GNSS, máy toàn đạc, máy thủy bình – Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy RTK GNSS, máy toàn đạc, máy thủy bình, GPS cầm tay chính hãng. Tư vấn kỹ thuật – giao hàng toàn quốc. Trắc địa Thành Đạt – 0913 051 734', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '4244', 'slug' => 'huong-dan-mua-hang', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '143', 'rght' => '144', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '586', 'name' => 'Chính sách thanh toán', 'code' => null, 'alias' => 'chinh-sach-thanh-toan', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> <!--[if !supportLineBreakNewLine]--><!--[endif]--></span> </span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chúng tôi c</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">hấp nhận các hình thức thanh toán bằng tiền mặt, chuyển khoản theo đúng quy định pháp luật. </span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (22).png" style="width: 320px; height: 183px;" /></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Quý khách có thể chọn các phương thức thanh toán sau đây:</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">I. Thanh toán trực tiếp tại cửa hàng<br /> <br /> II. Thanh toán qua hình thức chuyển khoản</span></strong><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Thông tin tài khoản:</span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <strong style="color: rgb(0, 0, 0); margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"><em>Chủ tài khoản</em>: CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></p> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em style="margin: 0px; padding: 0px;"><strong>Số tài khoản</strong></em><em style="margin: 0px; padding: 0px;">: <strong>0611001648635</strong> tại Ngân hàng TMCP Ngoại thương Việt Nam, chi nhánh Ba Đình<br /> <br /> <strong>Nội dung chuyển khoản</strong>: Tên công ty - Thông tin sản phẩm đã mua – Số điện thoại người chuyển tiền</em></span></span></span><br /> <br /> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Sau khi chuyển khoản hãy thông báo lại cho chúng tôi để chúng tôi kiểm tra và xác nhận lại cho Quý khách.</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">III. Thanh toán khi nhân viên đến giao nhận hàng</span></strong></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66);"> <span style="color:#000000;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">Quý khách hàng thanh toán trực tiếp bằng tiền mặt cho nhân viên giao hàng của chúng tôi ngay khi kiểm tra và nhận hàng.<br /> <br /> Mọi phản hồi và thắc mắc về việc thanh toán, Quý khách liên hệ <strong>0942 288 388</strong> để được tư vấn.</span></font><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span></span></p> ', 'images' => '20210407122232bf3e6d52a68ca60f97fc6048b14e4acc.jpg', 'images_multi' => '', 'pos' => '2', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3881', 'slug' => 'chinh-sach-thanh-toan', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '139', 'rght' => '140', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '587', 'name' => 'Chính sách vận chuyển', 'code' => null, 'alias' => 'chinh-sach-van-chuyen', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><span style="font-family:verdana,geneva,sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></strong><br /> <br /> Chúng tôi hỗ trợ giao hàng toàn quốc cho Quý khách mua hàng tại hệ thống cửa hàng của chúng tôi.</span></span><br /> </div> <div> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">Sau khi nhận được thông tin đặt hàng chúng tôi sẽ lập tức xử lý đơn hàng và phản hồi lại thông tin cho khách hàng về việc thanh toán và giao nhận.<br /> <br /> <strong>> Thời gian giao hàng </strong><br /> <br /> - Trong vòng 24 giờ nếu địa điểm giao hàng <b style="color: rgb(74, 74, 74); box-sizing: border-box;">≤ 20 km</b> tính từ cửa hàng của chúng tôi.</span></span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Trong vòng 1-2 ngày nếu địa điểm giao hàng nằm trong phạm vi <b style="box-sizing: border-box">50 - 100 km</b> </span></span><span style="font-family: Arial, sans-serif;"><o:p></o:p></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">tính từ cửa hàng của chúng tôi.<br /> <br /> - Trong vòng 3-5 ngày</span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> nếu địa điểm giao hàng từ <strong>20</strong></span><b style="font-family: tahoma, geneva, sans-serif; font-size: 14px; box-sizing: border-box;">0 km</b><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> trở lên </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">tính từ cửa hàng của chúng tôi.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trước khi vận chuyển, bộ phận giao nhận sẽ liên lạc với Quý khách hàng để xác nhận khoảng thời gian và địa điểm giao hàng cụ thể.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">> Phí vận chuyển</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> sẽ được tính theo từng giá trị đơn hàng và được thoả thuận giữa hai bên ngay trước khi giao hàng. </span></p> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px;">Mọi thắc mắc liên quan đến việc giao hàng, Quý khách hàng liên hệ số điện thoại <strong>0942 288 388</strong> để được giải đáp và giải quyết kịp thời.<br /> <br /> Trân trọng!</span></span></span></p> </div> ', 'images' => '20210407122135505ddef64809ce7ee5f9db7cfdfd3e2e.jpg', 'images_multi' => '', 'pos' => '3', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3923', 'slug' => 'chinh-sach-van-chuyen', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '141', 'rght' => '142', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '585', 'name' => 'Chính sách đổi trả', 'code' => null, 'alias' => 'chinh-sach-doi-tra', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Chúng tôi hỗ trợ đổi trả sản phẩm trong vòng 07 ngày nếu lỗi phát sinh do nhà sản xuất.<br /> <br /> Trong thời gian đổi trả, Công ty CP Công nghệ và Thương mại Thành Đạt sẽ hỗ trợ cung cấp máy móc thay thế kịp thời để công việc khảo sát, đo đạc của Quý khách không bị gián đoạn. Chi phí vận chuyển cho việc đổi trả do hai bên tự thoả thuận.</span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">> Điều kiện đổi trả: </span></span></strong></span><br /> <ul> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm phải còn nguyên tem mác.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm bị lỗi do nhà sản xuất.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm không đúng như đơn đặt hàng.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lần đổi trả cho 1 sản phẩm là 1 lần</span></span></span></li> </ul> <br /> <div style="text-align: start;"> <span style="color:#000000;"><strong><span style="text-align: justify;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">> </span></font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Việc đổi trả sẽ không được chấp nhận nếu:</span> <span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"> </span></span></strong></span></div> <ul> <li> <span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Trong quá trình sử dụng sản phẩm Quý khách không tuân thủ các chỉ dẫn của Nhà sản xuất.</span></span></li> <li> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="text-align: justify;">S</span>ản phẩm bị trầy xước, không nguyên vẹn</span></span></span></li> </ul> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, chúng tôi cũng hỗ trợ đổi trả sản phẩm vì lý do chủ quan của Quý khách hàng ( muốn đổi sang sản phẩm cùng chủng loại nhưng khác về màu sắc, hãng sản xuất hay thông số kỹ thuật). Chi phí cho việc đổi trả này do Quý khách hàng chịu.</span></span><br /> <br /> <span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"><img alt="" src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/lien-he.jpg" style="margin: 0px; padding: 8px 0px; height: 36px; max-width: 100%; vertical-align: middle; border: 0px; opacity: 1; font-size: 13px; width: 38px;" /><span style="margin: 0px; padding: 0px; font-size: 13px;"> </span></strong></span></span><span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"> </strong></span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Liên hệ hotline <strong>0913 051 734</strong> để được tư vấn đổi trả theo đúng qui định.</span></span>', 'images' => '202104071223177d9b7f6e319f9fa90078c7c61ed9bd19.jpg', 'images_multi' => '', 'pos' => '4', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3915', 'slug' => 'chinh-sach-doi-tra', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '137', 'rght' => '138', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '583', 'name' => 'Chính sách bảo hành', 'code' => null, 'alias' => 'chinh-sach-bao-hanh', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="color: rgb(66, 66, 66); text-align: justify;">Tất cả các sản phẩm mua tại hệ thống cửa hàng của chúng tôi đều được bảo hành chính hãng theo quy định của nhà sản xuất. </span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(66, 66, 66); text-align: justify;">Chúng tôi hỗ trợ kỹ thuật 24/7 qua số hotline <strong>0913 051 734</strong> trong suốt quá trình Quý khách sử dụng sản phẩm.</span></span></span></div> <div> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">1. Sản phẩm được bảo hành miễn phí: </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm sẽ được bảo hành miễn phí nếu sản phẩm đó còn thời hạn bảo hành (được tính kể từ ngày mua hàng).</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Thời hạn bảo hành được ghi trên Tem Bảo Hành và theo quy định của từng Nhà sản xuất đối với tất cả các sự cố về mặt kỹ thuật.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Có Tem bảo hành trên sản phẩm.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi sản phẩm có sự cố kĩ thuật chúng tôi sẽ trực tiếp khắc phục sự cố tại cửa hàng hoặc thay mặt khách hàng mang sản phẩm tới Trung Tâm Bảo Hành của hãng.</span></span></li> </ul> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">2. Những trường hợp không được bảo hành (sửa chữa có tính phí): </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm đã quá thời hạn bảo hành hoặc không có Tem bảo hành trên máy.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hư hỏng do tác động cơ học làm rơi, vỡ, va đập, trầy xước, móp méo, ẩm ướt, hoen rỉ, chảy nước hoặc do hỏa hoạn, thiên tai gây nên.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hỏng do sử dụng không đúng cách, sử dụng sai điện áp quy định.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Tự ý tháo dỡ, sửa chữa sản phẩm</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span><br /> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"> </span></span></div> ', 'images' => '20210407123801c4049edabae0c54e2347c82e21413ec3.jpg', 'images_multi' => '', 'pos' => '5', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3646', 'slug' => 'chinh-sach-bao-hanh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '133', 'rght' => '134', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '584', 'name' => 'Chính sách bảo mật thông tin', 'code' => null, 'alias' => 'chinh-sach-bao-mat-thong-tin', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">1. Mục đích thu nhập thông tin cá nhân</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51);">Thông tin cá nhân mà chúng tôi thu thập bao gồm: họ tên, địa chỉ giao hàng, địa chỉ email, số điện thoại cố định, số điện thoại di động, cookies.</span></p> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Đối với các giao dịch thanh toán qua cổng thanh toán trực tuyến, Chúng tôi không lưu trữ thông tin số tài khoản, số thẻ ngân hàng của khách hàng, những thông tin này sẽ được cổng thanh toán lưu trữ để phục vụ việc đối soát giao dịch.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân khách hàng sẽ được sử dụng cho một hoặc tất cả các mục đích sau đây:</span></span></span></span> <ul style="margin: 0px; padding: 0px 0px 0px 15px;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Giao hàng cho quý khách đã mua hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông báo về việc giao hàng và hỗ trợ khách hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Cung cấp thông tin liên quan đến sản phẩm</span></span></span></span></li> </ul> </li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoài ra, chúng tôi sẽ sử dụng thông tin của quý khách cung cấp để hỗ trợ quản lý tài khoản khách hàng (nếu có); xác nhận và thực hiện các giao dịch tài chính liên quan đến các khoản thanh toán trực tuyến của quý khách;</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi không được phép thu nhập thông tin nếu khách hàng không tự nguyện, cũng không sử dụng phương thức thu thập thông tin khách hàng bằng các hình thức bất hợp pháp.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">2. Phạm vi sử dụng thông tin</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân thu thập được sẽ chỉ được sử dụng trong nội bộ công ty.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể chia sẻ tên và địa chỉ của quý khách cho dịch vụ chuyển phát nhanh có uy tín để giao hàng cho quý khách theo cam kết.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">3. Thời gian lưu trữ thông tin</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">Thông tin khách hàng được lưu trữ nội bộ cho đến khi có yêu cầu xóa thông tin từ phía khách hàng.</span></p> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Những người hoặc tổ chức có thể được tiếp cận với thông tin </span></span></h2> <br /> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng được tiếp cận với thông tin cá nhân của khách hàng thuộc một trong những trường hợp sau:</span></span><br /> </div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Nhân viên của Công ty Cổ phần Công nghệ và thương mại Thành Đạt</span></span></div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Các đối tác có ký hợp đồng thực hiện 1 phần dịch vụ của Công ty. Các đối tác này sẽ nhận được những thông tin theo thỏa thuận hợp đồng (có thể 1 phần hoặc toàn bộ thông tin tuy theo điều khoản hợp đồng) để tiến hành hỗ trợ người dùng sử dụng dịch vụ do Công ty cung cấp.</span></span></div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ của đơn vị thu thập và quản lý thông tin</span></span></h2> <div style="text-align: justify;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(bao gồm cách thức liên lạc để người tiêu dùng có thể hỏi về hoạt động thu thập, xử lý thông tin liên quan đến cá nhân mình)</span></span></em></div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ của đơn vị thu thập và quản lý thông tin:</span></span><br /> </div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Công ty Cổ phần Công nghệ và thương mại Thành Đạt </span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Địa chỉ: số 157 phố Đặng Văn Ngữ, P. Phương Liên, Q. Đống Đa, Tp. Hà Nội</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Điện thoại: 0243 7764930</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Email: tracdiathanhdat@gmail.com<span style="white-space: pre;"> </span></span></span></strong></div> </div> </div> <p style="text-align: justify;"> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Người dùng có thể gọi điện tới tổng đài hỗ trợ và chăm sóc khách hàng </span><strong style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify; margin: 0px; padding: 0px;">0949 322 456</strong><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để điều chỉnh hoặc xóa đi dữ liệu cá nhân của mình.</span><br /> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">6. Cam kết bảo mật thông tin cá nhân khách hàng</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Không bán, chia sẻ hay trao đổi thông tin cá nhân của khách hàng thu thập trên trang web cho một bên thứ ba nào khác.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoại trừ các trường hợp về sử dụng thông tin cá nhân như đã nêu trong chính sách này,chúng tôi cam kết không tiết lộ thông tin cá nhân của bạn ra ngoài. Trong một số trường hợp, chúng tôi có thể thuê một đơn vị độc lập để tiến hành các dự án nghiên cứu thị trường và khi đó thông tin của bạn sẽ được cung cấp cho đơn vị này để tiến hành dự án. Bên thứ ba này sẽ bị ràng buộc bởi một thỏa thuận về bảo mật mà theo đó họ chỉ được phép sử dụng những thông tin được cung cấp cho mục đích hoàn thành dự án.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể tiết lộ hoặc cung cấp thông tin cá nhân của bạn trong các trường hợp thật sự cần thiết như sau: (a) khi có yêu cầu của các cơ quan pháp luật; (b) trong trường hợp mà chúng tôi tin rằng điều đó sẽ giúp chúng tôi bảo vệ quyền lợi chính đáng của mình trước pháp luật.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">7. Thay đổi về chính sách</span></span></span></span></h2> <p style="text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Nội dung của “Chính sách bảo mật” này có thể thay đổi để phù hợp với các nhu cầu của Công Ty CP Công nghệ và Thương Mại Thành Đạt cũng như nhu cầu và sự phản hồi từ khách hàng (nếu có). </span></span></span></span></p> </div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi hiểu rằng quyền lợi của bạn trong việc bảo vệ thông tin cá nhân cũng chính là trách nhiệm của chúng tôi nên trong bất kỳ trường hợp có thắc mắc, góp ý nào liên quan đến chính sách bảo mật, việc thông tin cá nhân bị sử dụng sai mục đích vui lòng liên hệ qua số điện thoại <strong>0949 322 456</strong> hoặc gửi phản hồi về địa chỉ email: <em><strong>tracdiathanhdat@gmail.com.</strong></em><br /> <br /> Trân trọng!</span></span></div> ', 'images' => '202104071236589b665b2accf17da9077cea4c5dad8e94.jpg', 'images_multi' => '', 'pos' => '6', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3920', 'slug' => 'chinh-sach-bao-mat-thong-tin', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '135', 'rght' => '136', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) ) $slideshow = array( (int) 0 => array( 'Slideshow' => array( 'id' => '1158', 'name' => '', 'images' => '202607021457295d6b626c7966fea8ed15b90188f75e84.png', 'created' => '2026-07-02 14:57:29', 'modified' => '2026-07-02 14:57:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 1 => array( 'Slideshow' => array( 'id' => '1157', 'name' => '', 'images' => '20260630144106967d7220891508e0bc589157b72a4a6f.png', 'created' => '2026-06-30 14:41:06', 'modified' => '2026-06-30 14:41:06', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 2 => array( 'Slideshow' => array( 'id' => '1156', 'name' => '', 'images' => '20260627100900c4525d4b0ad85bb7ed6e5f31fbe008ce.png', 'created' => '2026-06-27 10:09:00', 'modified' => '2026-06-27 10:09:00', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 3 => array( 'Slideshow' => array( 'id' => '1153', 'name' => '', 'images' => '2026060910315463c4488ef0eebcd97a80c7be838ec857.png', 'created' => '2026-06-09 10:31:54', 'modified' => '2026-06-09 10:31:54', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 4 => array( 'Slideshow' => array( 'id' => '1151', 'name' => '', 'images' => '20260505105747cef035cfde3d3e4fc486dcc70906dab9.png', 'created' => '2026-05-05 10:57:47', 'modified' => '2026-05-05 10:57:47', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 5 => array( 'Slideshow' => array( 'id' => '1147', 'name' => '', 'images' => '20260504151401463305739b212edcd50d4df28ea21663.png', 'created' => '2026-05-04 15:14:01', 'modified' => '2026-05-04 15:14:01', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 6 => array( 'Slideshow' => array( 'id' => '1111', 'name' => '', 'images' => '2025091214412921cbc3cbc42d3d64fe4364ad8b7a9b7e.png', 'created' => '2025-09-12 14:41:29', 'modified' => '2025-09-12 14:41:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 7 => array( 'Slideshow' => array( 'id' => '1099', 'name' => '', 'images' => '20250707100715baf5ecd84c6a8766519b98f66eec1511.png', 'created' => '2025-07-07 10:07:15', 'modified' => '2025-07-07 10:07:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 8 => array( 'Slideshow' => array( 'id' => '1096', 'name' => '', 'images' => '202504251616158fbd912c821051db2e9e1ebe215c4da4.png', 'created' => '2025-04-25 16:16:15', 'modified' => '2025-04-25 16:16:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 9 => array( 'Slideshow' => array( 'id' => '1055', 'name' => '', 'images' => '202502071107533894de97e081b06e5749a83e6bed2399.png', 'created' => '2025-02-07 11:07:53', 'modified' => '2025-02-07 11:07:53', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 10 => array( 'Slideshow' => array( 'id' => '1008', 'name' => '', 'images' => '20240822084848c3089726a8fff539a5f1adcaaca9cd73.png', 'created' => '2024-08-22 08:48:48', 'modified' => '2024-08-22 08:48:48', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 11 => array( 'Slideshow' => array( 'id' => '961', 'name' => '', 'images' => '202403121029063cfd7328162ff668a881f7e275a1a01d.png', 'created' => '2024-03-12 10:29:08', 'modified' => '2024-03-12 10:29:08', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 12 => array( 'Slideshow' => array( 'id' => '850', 'name' => '', 'images' => '20230605160932d4a880ffcab96141d7a3538bf17255de.png', 'created' => '2023-06-05 16:09:33', 'modified' => '2023-12-25 09:27:46', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 13 => array( 'Slideshow' => array( 'id' => '817', 'name' => '', 'images' => '20230306160629b7490cbbbd5cfd081d8ec1930914a677.png', 'created' => '2023-03-06 16:06:29', 'modified' => '2025-12-23 09:03:28', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 14 => array( 'Slideshow' => array( 'id' => '617', 'name' => '', 'images' => '20220713143712ec1e28dc996e7d39d7535a730ead176e.png', 'created' => '2022-07-13 14:37:12', 'modified' => '2024-12-02 16:11:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ) ) $adv_khuyenmai = array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ) $doitac = array( (int) 0 => array( 'Advertisement' => array( 'id' => '36', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/bosch', 'images' => '20151223081939be7f9ca66f2fb4e760fb991d89d74002.png', 'display' => '3', 'created' => '2015-12-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '33', 'rght' => '34' ) ), (int) 1 => array( 'Advertisement' => array( 'id' => '33', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/pentax', 'images' => '20151216094854d7903c4f5ae6da9780bc88cbb048d417.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '27', 'rght' => '28' ) ), (int) 2 => array( 'Advertisement' => array( 'id' => '16', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/topcon', 'images' => '2015121609180430293457191c29e0d0d7a715d26041bd.png', 'display' => '3', 'created' => '2015-12-10', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '7', 'rght' => '8' ) ), (int) 3 => array( 'Advertisement' => array( 'id' => '27', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/trimple', 'images' => '2015121609470060450f77189189cce8edb27ef59c46d2.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '15', 'rght' => '16' ) ), (int) 4 => array( 'Advertisement' => array( 'id' => '28', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20151216094709d0c1b1d5ffcc17a598904261de69c485.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '17', 'rght' => '18' ) ), (int) 5 => array( 'Advertisement' => array( 'id' => '29', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/kenwood', 'images' => '201512160947288286f4b931bdbc0e64dfd484fc6c12e5.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '19', 'rght' => '20' ) ), (int) 6 => array( 'Advertisement' => array( 'id' => '30', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/nikon', 'images' => '202210171542300b1b7918f461a4dd8d877236543412d8.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '21', 'rght' => '22' ) ), (int) 7 => array( 'Advertisement' => array( 'id' => '34', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sincon', 'images' => '20151216095020f699fb43b225af9cb76ffe022e057faf.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '29', 'rght' => '30' ) ), (int) 8 => array( 'Advertisement' => array( 'id' => '31', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/garmin', 'images' => '201512160948147d3b76212a8ebdd03d45fc49a95a9868.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '23', 'rght' => '24' ) ), (int) 9 => array( 'Advertisement' => array( 'id' => '26', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/leica', 'images' => '20151216094654c3a83e015935188821aa9ee65e6b322f.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '13', 'rght' => '14' ) ), (int) 10 => array( 'Advertisement' => array( 'id' => '25', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sokkia', 'images' => '2015121609464772166f729226cebe52ae986c2699c3a1.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '11', 'rght' => '12' ) ), (int) 11 => array( 'Advertisement' => array( 'id' => '24', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/foif', 'images' => '2015121609482733afba0b93b9383e6ea26a08124e8a76.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '9', 'rght' => '10' ) ), (int) 12 => array( 'Advertisement' => array( 'id' => '54', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424094203a24f4d5a812351010a6355d888b944ec.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '57', 'rght' => '58' ) ), (int) 13 => array( 'Advertisement' => array( 'id' => '55', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '2021042409421996a13aed03c03b49b7d965db5dbcfdd6.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '59', 'rght' => '60' ) ), (int) 14 => array( 'Advertisement' => array( 'id' => '56', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/motorola', 'images' => '20220805103835e45b76131731a737df5e8dec49916375.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '61', 'rght' => '62' ) ), (int) 15 => array( 'Advertisement' => array( 'id' => '57', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/yamayo', 'images' => '20250304144532ee8e939d0c9e884e1a50ad352b272730.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2025-03-04', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '63', 'rght' => '64' ) ), (int) 16 => array( 'Advertisement' => array( 'id' => '58', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424100013ce6e6d048914eccdc312d53e64e566b7.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '65', 'rght' => '66' ) ), (int) 17 => array( 'Advertisement' => array( 'id' => '59', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/geomax', 'images' => '2021051416090922e7bec3a6dfe8041780aa125f5f4932.jpg', 'display' => '3', 'created' => '2021-05-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '67', 'rght' => '68' ) ), (int) 18 => array( 'Advertisement' => array( 'id' => '60', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/south', 'images' => '20210623100351b1da5960a28a9deb6af4e028880d625b.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '69', 'rght' => '70' ) ), (int) 19 => array( 'Advertisement' => array( 'id' => '62', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/e-survey', 'images' => '20211124221103bda9f65e28426fc1f93c4f5f223cd1bc.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-11-24', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '71', 'rght' => '72' ) ), (int) 20 => array( 'Advertisement' => array( 'id' => '68', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hi-target', 'images' => '2021112422134905fc59de564b69bfad9ca0b5f7204ffa.png', 'display' => '3', 'created' => '2021-08-05', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '73', 'rght' => '74' ) ), (int) 21 => array( 'Advertisement' => array( 'id' => '73', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/dji', 'images' => '2021102921504774fd5e8eec5eed69455accd89f7429e5.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '83', 'rght' => '84' ) ), (int) 22 => array( 'Advertisement' => array( 'id' => '74', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/spectra-geospatial-spectra-precision', 'images' => '202110292149162a2a919ea2a12b8255429f33eb51a1a8.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '85', 'rght' => '86' ) ), (int) 23 => array( 'Advertisement' => array( 'id' => '75', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/efix', 'images' => '202207131224432d602a710c7f1a152566aec421d281d7.png', 'display' => '3', 'created' => '2022-07-13', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '87', 'rght' => '88' ) ), (int) 24 => array( 'Advertisement' => array( 'id' => '76', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/chcnav', 'images' => '20220714162725db2138b3dcabb86eedc65c4ba1f6ccce.jpg', 'display' => '3', 'created' => '2022-07-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '89', 'rght' => '90' ) ), (int) 25 => array( 'Advertisement' => array( 'id' => '78', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202208051039345c0c28b21fe05a0c9d4f65b176fe7063.jpg', 'display' => '3', 'created' => '2022-08-05', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '93', 'rght' => '94' ) ), (int) 26 => array( 'Advertisement' => array( 'id' => '79', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202210171541561896d0eb31d272d3d99a9a8c0d3582fa.png', 'display' => '3', 'created' => '2022-10-17', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '95', 'rght' => '96' ) ), (int) 27 => array( 'Advertisement' => array( 'id' => '100', 'name' => null, 'link' => '', 'images' => '20230515143931e088ce1b8d5b9bcf57916a733e5ff5e3.jpg', 'display' => '3', 'created' => '2023-05-15', 'modified' => '2023-05-15', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '117', 'rght' => '118' ) ), (int) 28 => array( 'Advertisement' => array( 'id' => '107', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/bua-dung-cho-khao-sat-dia-chat-estwing-e3-22p.html', 'images' => '20240130151328303b311c40a2276c91bf7e4f0aa460ce.png', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '125', 'rght' => '126' ) ), (int) 29 => array( 'Advertisement' => array( 'id' => '108', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/ong-nhom-celestron-nature-dx-10-42.html', 'images' => '20240130151701574ebc151c3252c2eb93d6504efdc5ab.jpg', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '127', 'rght' => '128' ) ), (int) 30 => array( 'Advertisement' => array( 'id' => '114', 'name' => null, 'link' => '', 'images' => '20250917151944a9ff8314bd4af3bf87c9037dceceff53.png', 'display' => '3', 'created' => '2025-09-17', 'modified' => '2025-09-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '131', 'rght' => '132' ) ) ) $chayphai = array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ) $chaytrai = array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ) $chiasekinhnghiem = array() $list_menu_footer = array() $danhmuc_left_parent_sphot = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc_left_parent = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc = array( (int) 0 => array( 'Catproduct' => array( 'id' => '1', 'name' => 'Trang chủ', 'slug' => 'trang-chu' ) ), (int) 1 => array( 'Catproduct' => array( 'id' => '3', 'name' => 'Giới thiệu ', 'slug' => 'gioi-thieu' ) ), (int) 2 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ), (int) 3 => array( 'Catproduct' => array( 'id' => '5', 'name' => 'Phần mềm - HDSD ', 'slug' => 'phan-mem-hdsd' ) ), (int) 4 => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'slug' => 'kien-thuc-ung-dung' ) ), (int) 5 => array( 'Catproduct' => array( 'id' => '6', 'name' => 'Liên hệ', 'slug' => 'lien-he' ) ) ) $support = array( (int) 0 => array( 'Support' => array( 'id' => '13', 'name' => 'Co so Ha noi', 'phone' => '098 987 678', 'yahoo' => 'duycuong7640', 'skype' => 'duycuong7640', 'pos' => '0', 'created' => '2013-09-13', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ), (int) 1 => array( 'Support' => array( 'id' => '16', 'name' => 'Co so TP.HCM', 'phone' => '3252 436 432', 'yahoo' => 'duycuong7640', 'skype' => 'tuvantubep', 'pos' => '0', 'created' => '2014-01-15', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ) ) $content_for_layout = '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ' $scripts_for_layout = '' $count = (int) 0 $price = (int) 0 $sl = (int) 0 $cap1 = array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'slug' => 'kien-thuc-ung-dung' ) ) $dm_c2 = array() $cap2 = array( 'Catproduct' => array( 'id' => '47', 'name' => 'Sản phẩm khác', 'parent_id' => '2', 'alias' => 'san-pham-khac', 'images' => '2024010816004972262bc63fc2344d41a2a0d35c8176a7.png', 'lft' => '28', 'rght' => '29', 'pos' => '14', 'status' => '1', 'title_seo' => 'địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,..', 'meta_key' => 'địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,..', 'meta_des' => 'Chuyên cung cấp địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,.. Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2016-01-25', 'modified' => '2024-01-08', 'slug' => 'san-pham-khac', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) $dm_c3 = array()include - APP/View/Elements/menu.ctp, line 56 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::element() - CORE/Cake/View/View.php, line 424 include - APP/View/Layouts/home.ctp, line 169 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::renderLayout() - CORE/Cake/View/View.php, line 539 View::render() - CORE/Cake/View/View.php, line 483 Controller::render() - CORE/Cake/Controller/Controller.php, line 957 ProductController::chitiet() - APP/Controller/ProductController.php, line 135 ReflectionMethod::invokeArgs() - [internal], line ?? Controller::invokeAction() - CORE/Cake/Controller/Controller.php, line 485 Dispatcher::_invoke() - CORE/Cake/Routing/Dispatcher.php, line 186 Dispatcher::dispatch() - CORE/Cake/Routing/Dispatcher.php, line 161 [main] - APP/webroot/index.php, line 92
Notice (8): Undefined index: name_eng [APP/View/Elements/menu.ctp, line 56]Code Context<div class="accordion-heading"><a class="accordion-toggle" <?php if(!empty($dm_c2)){?>data-toggle="collapse" data-parent="#accordion2" href="#collapse<?php echo $cap1['Catproduct']['id'];?>" title="<?php echo $cap1['Catproduct']['name'.LANGUAGE];?>"<?php }else{?>href="<?php echo DOMAIN.$cap1['Catproduct']['slug'];?>"<?php }?>><?php echo $cap1['Catproduct']['name'.LANGUAGE];?>$viewFile = '/home/tracdiathanhda/domains/tracdiathanhdat.vn/public_html/app/View/Elements/menu.ctp' $dataForView = array( 'cat12' => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'description_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'keywords_for_layout' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'title_for_layout' => 'Máy kinh vĩ', 'tinmoiup' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'tinlq' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 6 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 7 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 8 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 9 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'detailNews' => array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), 'setting' => array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ), 'tin_ft' => array( (int) 0 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Post' => array( [maximum depth reached] ), 'Catproduct' => array( [maximum depth reached] ) ) ), 'slideshow' => array( (int) 0 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 1 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 2 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 3 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 4 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 5 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 6 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 7 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 8 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 9 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 10 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 11 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 12 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 13 => array( 'Slideshow' => array( [maximum depth reached] ) ), (int) 14 => array( 'Slideshow' => array( [maximum depth reached] ) ) ), 'adv_khuyenmai' => array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ), 'doitac' => array( (int) 0 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 1 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 2 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 3 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 4 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 5 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 6 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 7 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 8 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 9 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 10 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 11 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 12 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 13 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 14 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 15 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 16 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 17 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 18 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 19 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 20 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 21 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 22 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 23 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 24 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 25 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 26 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 27 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 28 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 29 => array( 'Advertisement' => array( [maximum depth reached] ) ), (int) 30 => array( 'Advertisement' => array( [maximum depth reached] ) ) ), 'chayphai' => array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ), 'chaytrai' => array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ), 'chiasekinhnghiem' => array(), 'list_menu_footer' => array(), 'danhmuc_left_parent_sphot' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc_left_parent' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'danhmuc' => array( (int) 0 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 1 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 2 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 3 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 4 => array( 'Catproduct' => array( [maximum depth reached] ) ), (int) 5 => array( 'Catproduct' => array( [maximum depth reached] ) ) ), 'support' => array( (int) 0 => array( 'Support' => array( [maximum depth reached] ) ), (int) 1 => array( 'Support' => array( [maximum depth reached] ) ) ), 'content_for_layout' => '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ', 'scripts_for_layout' => '' ) $cat12 = array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $description_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $keywords_for_layout = 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)' $title_for_layout = 'Máy kinh vĩ' $tinmoiup = array( (int) 0 => array( 'Post' => array( 'id' => '823', 'name' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật – Những bước quan trọng để đảm bảo độ chính xác', 'code' => null, 'alias' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-–-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập trạm Base RTK đúng cách có quan trọng không? Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Thiết lập trạm Base RTK đúng cách có quan trọng không?<br /> <br /> Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.<br /> <br /> Mặc dù giao diện phần mềm của mỗi hãng có thể khác nhau, quy trình thiết lập Base nhìn chung đều tuân theo các nguyên tắc giống nhau. Dưới đây là các bước cơ bản giúp triển khai một trạm Base RTK ổn định và đáng tin cậy.</em><br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7881291487147_f174a50258d6ad97ccd34f717df81a2b.jpg" style="width: 800px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Chọn vị trí đặt Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quan trọng nhất trước khi bật máy. Một vị trí tốt nên đáp ứng các điều kiện sau:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thoáng, có góc quan sát bầu trời rộng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh cây lớn, mái che hoặc công trình cao tầng che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế đặt gần tường kính, mái tôn hoặc mặt nước để giảm hiện tượng phản xạ tín hiệu (Multipath).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh gần đường dây điện cao thế hoặc nguồn phát sóng mạnh nếu có thể.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nền đất hoặc mặt bằng ổn định, ít rung động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu đặt Base trên mốc khống chế, cần đảm bảo mốc không bị xê dịch trong suốt quá trình đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lắp chân máy và định tâm</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi chọn vị trí phù hợp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở chân máy chắc chắn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều chỉnh chiều cao thuận tiện cho việc thao tác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định tâm chính xác trên mốc bằng dọi quang học hoặc dọi laser (nếu có).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng bọt thủy theo hướng dẫn của thiết bị.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trường hợp sử dụng chân máy thông thường ngoài hiện trường, nên kiểm tra lại việc định tâm sau khi siết chặt các khóa chân máy vì quá trình thao tác có thể làm lệch vị trí ban đầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Đo chiều cao anten</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten là một thông số rất quan trọng. Thông thường, phần mềm sẽ yêu cầu người dùng nhập:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao nghiêng (Slant Height), hoặc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao đứng (Vertical Height).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần đo đúng theo phương pháp mà phần mềm yêu cầu.<br /> <br /> > Một số lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng thước chuyên dụng nếu có.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo ít nhất hai lần để kiểm tra.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại đơn vị (mét hoặc milimét).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không ước lượng bằng mắt.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc nhập sai chiều cao anten sẽ làm sai tọa độ của trạm Base và có thể ảnh hưởng đến toàn bộ dữ liệu hiệu chỉnh RTK.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Thiết lập tọa độ Base</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là bước quyết định hệ quy chiếu mà Rover sẽ sử dụng. <br /> <br /> 4.1 Trường hợp 1: Base đặt trên điểm đã biết tọa độ (<strong>Known Point</strong>)<br /> <br /> Đây là phương pháp được ưu tiên. Người dùng nhập chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X, Y, H hoặc B, L, H.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ tọa độ tương ứng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao anten.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi xác nhận, Base sẽ phát dữ liệu hiệu chỉnh dựa trên tọa độ đã biết.<br /> <br /> > Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ tin cậy cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với đo địa chính, khảo sát công trình, hoàn công và các công việc yêu cầu liên kết với hệ tọa độ hiện có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 4.2 Trường hợp 2: <strong>Base Here</strong> (Base tự xác định tọa độ)<br /> <br /> Nếu chưa có mốc khống chế, người dùng có thể để máy tự xác định vị trí hiện tại (Base Here hoặc Autonomous).<br /> Phương pháp này thường được sử dụng khi:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát sơ bộ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập lưới khống chế tạm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình chưa yêu cầu liên kết với hệ tọa độ chính thức.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu ý rằng tọa độ Base Here chỉ mang tính tương đối. Nếu cần liên kết với hệ tọa độ công trình hoặc VN-2000, nên đo khống chế hoặc sử dụng các phương pháp chuyển đổi phù hợp trước khi triển khai chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cấu hình truyền dữ liệu cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Base có tọa độ, cần cấu hình phương thức truyền dữ liệu hiệu chỉnh đến Rover. Hai phương thức phổ biến hiện nay là:<br /> <br /> <strong>5.1 Truyền bằng Radio UHF</strong><br /> <br /> Khi dùng phương thức này cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tần số phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Băng thông (Bandwidth).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao thức truyền (Protocol).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten UHF đã được lắp đúng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base và Rover phải sử dụng cùng cấu hình để có thể liên lạc.<br /> <br /> <strong>5.2 Truyền qua Internet (NTRIP)</strong><br /> <br /> Trong trường hợp sử dụng mạng Internet nội bộ hoặc triển khai Base riêng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra kết nối 4G/5G hoặc Wi-Fi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra địa chỉ IP hoặc Caster.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Port.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mountpoint.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tài khoản và mật khẩu nếu có.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Kiểm tra trạng thái phát cải chính</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi hoàn tất cấu hình, cần kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base đã bắt đủ số lượng vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đã bắt đầu phát dữ liệu cải chính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không xuất hiện cảnh báo lỗi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radio hoặc Internet hoạt động ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin hoặc nguồn ngoài đủ cho thời gian làm việc.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các hệ thống Radio, nên kiểm tra thêm cường độ tín hiệu giữa Base và Rover trước khi bắt đầu đo.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Kiểm tra Rover đã FIX ổn định</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi Rover kết nối với Base, không nên đo ngay. <br /> <br /> Nên kiểm tra:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm đạt FIX.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lượng vệ tinh ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PDOP ở mức phù hợp.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Age of Correction thấp và ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số RMS hoặc Estimated Precision nằm trong giới hạn cho phép của công việc.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu Rover liên tục chuyển giữa FIX và FLOAT, cần kiểm tra lại:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách đến Base.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu Radio hoặc Internet.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện che khuất vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình truyền dữ liệu.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Một số lỗi thường gặp khi thiết lập Base</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đặt Base không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt dưới tán cây, gần nhà cao tầng hoặc gần nguồn phản xạ mạnh có thể làm giảm chất lượng quan sát GNSS.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo sai chiều cao anten</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá phổ biến và có thể ảnh hưởng đến kết quả tính toán tọa độ của trạm Base.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai tọa độ Base</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ, sai kinh tuyến trục, sai cao độ hoặc nhập nhầm tọa độ sẽ khiến Rover đo sai toàn bộ.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai cấu hình Radio</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác tần số, giao thức hoặc công suất giữa Base và Rover sẽ khiến Rover không nhận được dữ liệu hiệu chỉnh.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Di chuyển Base trong khi đang đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu chân máy bị dịch chuyển trong quá trình làm việc, toàn bộ kết quả sau thời điểm dịch chuyển đều có thể không còn đảm bảo độ tin cậy và nên được kiểm tra hoặc đo lại.</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguồn điện không đủ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Base mất nguồn hoặc khởi động lại giữa ca đo sẽ làm gián đoạn việc truyền dữ liệu hiệu chỉnh đến Rover.<br /> <br /> >>> Thiết lập Base RTK không chỉ là vài thao tác trên bộ điều khiển mà còn bao gồm việc lựa chọn vị trí đặt máy, định tâm chính xác, nhập đúng chiều cao anten, cấu hình tọa độ và kiểm tra trạng thái hoạt động của toàn bộ hệ thống. Thực hiện đúng các bước ngay từ đầu sẽ giúp Rover nhận dữ liệu hiệu chỉnh ổn định, giảm thời gian xử lý sự cố ngoài thực địa và nâng cao độ tin cậy của kết quả đo.<br /> <br /> Mặc dù tên gọi các chức năng hoặc giao diện có thể khác nhau giữa các hãng, nguyên tắc thiết lập trạm Base về cơ bản vẫn tương tự. Nắm vững các nguyên lý này sẽ giúp người sử dụng dễ dàng làm việc với nhiều dòng RTK khác nhau.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 260626.png" style="width: 800px; height: 533px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Liên hệ ngay <a href="https://zalo.me/0913051734"><span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt qua Zalo</strong></span></a> để được tư vấn chọn máy phù hợp nhất!</span></span><br /> <a class="zalo-float" href="https://zalo.me/0949322456" rel="noopener" target="_blank"> <span class="zalo-icon">Z</span> <span class="zalo-text">Nhắn Zalo</span> </a> <style type="text/css"> .zalo-float { position: fixed; right: 20px; bottom: 90px; z-index: 9999; display: flex; align-items: center; gap: 8px; background: #0068ff; color: #fff; padding: 12px 16px; border-radius: 999px; font-weight: 700; font-size: 15px; text-decoration: none; box-shadow: 0 8px 24px rgba(0,0,0,0.22); } .zalo-float:hover { transform: translateY(-2px); opacity: 0.95; } .zalo-icon { width: 28px; height: 28px; border-radius: 50%; background: #fff; color: #0068ff; display: flex; align-items: center; justify-content: center; font-weight: 800; } @media (max-width: 768px) { .zalo-float { right: 14px; bottom: 80px; padding: 11px 14px; font-size: 14px; } }</style> ', 'images' => '202606260951032f4d94b16f8c4b40c845fa69fd0c4dc4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Hướng dẫn thiết lập trạm Base RTK đúng kỹ thuật từ A đến Z', 'meta_key' => '', 'meta_des' => 'Hướng dẫn chi tiết cách thiết lập trạm Base RTK: chọn vị trí, định tâm, đo chiều cao anten, cấu hình Known Point hoặc Base Here, Radio/NTRIP và các lỗi thường gặp.', 'created' => '2026-06-26', 'modified' => '2026-07-12', 'status' => '1', 'view' => '525', 'slug' => 'huong-dan-thiet-lap-tram-base-rtk-dung-ky-thuat-nhung-buoc-quan-trong-de-dam-bao-do-chinh-xac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '557', 'rght' => '558', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '822', 'name' => 'Hiểu đúng về RTCM 1021–1027, Helmert (Bursa-Wolf), 7 tham số và chuyển đổi hệ tọa độ', 'code' => null, 'alias' => 'hieu-dung-ve-rtcm-1021–1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàncầu sang hệ tọa độ làm việc tại địa phương.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi cấu hình máy RTK, đặc biệt ở bước thiết lập hệ tọa độ, nhiều kỹ sư sẽ gặp các thuật ngữ như RTCM 1021–1027, Bursa-Wolf (Helmert) 7 tham số, VN-2000, WGS84 hay ITRF. Đây đều là những khái niệm liên quan đến một vấn đề quan trọng trong GNSS RTK: chuyển kết quả đo từ hệ quy chiếu toàn cầu sang hệ tọa độ làm việc tại địa phương.<br /> <br /> Vậy RTK thực chất đo trong hệ nào?<br /> <br /> Máy thu GNSS không đo trực tiếp trong hệ tọa độ VN-2000. Thay vào đó, thiết bị xác định vị trí trong một hệ quy chiếu địa tâm toàn cầu (global geocentric reference frame), chẳng hạn như WGS84 hoặc các realization gần với ITRF (International Terrestrial Reference Frame).<br /> <br /> Trong khi đó, tại Việt Nam, phần lớn bản đồ địa hình, bản đồ địa chính, hồ sơ thiết kế và công trình lại sử dụng hệ tọa độ VN-2000 hoặc hệ tọa độ công trình. <br /> <br /> Vì vậy, trước khi có thể sử dụng ngoài thực địa, kết quả đo GNSS cần được chuyển đổi sang hệ tọa độ làm việc.<br /> <br /> Có thể hình dung quy trình tổng quát như sau: <strong>GNSS/RTK → WGS84 hoặc ITRF (realization cụ thể) → Chuyển đổi hệ quy chiếu và phép chiếu bản đồ (khi cần) → VN-2000 hoặc hệ tọa độ công trình.</strong><br /> <br /> <em>Lưu ý: WGS84 và ITRF đều có nhiều phiên bản (realizations) được cập nhật theo thời gian. Trong hầu hết công việc RTK thông thường, quá trình này đã được phần mềm RTK hoặc dịch vụ CORS xử lý. Tuy nhiên, với các ứng dụng yêu cầu độ chính xác cao hoặc xử lý dữ liệu nhiều thời kỳ, vẫn cần quan tâm đến reference frame và epoch của dữ liệu.</em></span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. 7 tham số là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong trắc địa, một trong những mô hình phổ biến để chuyển đổi giữa hai hệ quy chiếu là phép biến đổi 7 tham số (Seven-Parameter Transformation).<br /> <br /> Bộ tham số gồm: </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔX: Tịnh tiến theo trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔY: Tịnh tiến theo trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ΔZ: Tịnh tiến theo trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rx: Góc quay quanh trục X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ry: Góc quay quanh trục Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rz: Góc quay quanh trục Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Scale: Hệ số tỷ lệ (ppm)</span></span></li> </ul> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/coordtrans datum transformation.gif" style="width: 613px; height: 407px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong đó:<br /> - Ba tham số đầu mô tả sự dịch chuyển giữa hai hệ quy chiếu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ba tham số tiếp theo mô tả sự quay.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Tham số cuối cùng mô tả sự khác biệt về tỷ lệ.</span></span></span></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình này giả thiết rằng mối quan hệ giữa hai hệ quy chiếu có thể được biểu diễn bằng một phép biến đổi gồm ba tham số tịnh tiến, ba tham số quay và một tham số tỷ lệ.<br /> <br /> Trong các phần mềm RTK, người dùng có thể gặp nhiều tên gọi như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Seven Parameters</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Helmert Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bursa-Wolf Transformation</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Datum Transformation</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư hiện trường, điều quan trọng cần nhớ là: 7 tham số là một mô hình dùng để chuyển đổi giữa hai hệ quy chiếu.<br /> <br /> Trong những khu vực có biến dạng không đồng nhất, mô hình này có thể không đạt độ chính xác cao bằng các phương pháp sử dụng lưới hiệu chỉnh (Grid Shift).<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Bursa-Wolf và Helmert có giống nhau không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là điểm khá nhiều người nhầm lẫn. Trong nhiều phần mềm RTK, hai tên gọi: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Helmert Transformation & </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Bursa-Wolf Transformation </span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">được sử dụng gần như thay thế cho nhau. <br /> <br /> Tuy nhiên, xét dưới góc độ học thuật, Bursa-Wolf là một quy ước biểu diễn của phép biến đổi Helmert 7 tham số. Sự khác biệt chủ yếu nằm ở quy ước dấu và cách biểu diễn các tham số quay. Đối với phần lớn công việc RTK ngoài thực địa, sự khác biệt này thường không ảnh hưởng đến quá trình sử dụng nếu các tham số được khai báo đúng theo quy ước mà phần mềm yêu cầu.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Ngoài 7 tham số còn có những phương pháp nào?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi phép chuyển đổi tọa độ đều sử dụng mô hình 7 tham số. Một số phương pháp phổ biến khác gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Molodensky–Badekas</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp này cũng sử dụng bảy tham số nhưng thực hiện phép quay quanh một điểm gốc cục bộ (origin point) thay vì tâm Trái Đất. Cách tiếp cận này thường giúp giảm ảnh hưởng của sai số quay trong các hệ tọa độ địa phương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Grid Shift</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khác với mô hình 7 tham số, Grid Shift không sử dụng một bộ tham số chung cho toàn bộ khu vực mà áp dụng các giá trị hiệu chỉnh được nội suy từ lưới.<br /> <br /> Ví dụ: </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">NTv2, </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Geoid Grid</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với những khu vực có biến dạng không đồng đều, Grid Shift thường cho độ chính xác cao hơn mô hình 7 tham số.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. RTCM 1021–1027 là gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM (Radio Technical Commission for Maritime Services) là tiêu chuẩn quốc tế dùng để truyền dữ liệu hiệu chỉnh trong GNSS RTK. <br /> <br /> Khi nhắc đến RTCM, nhiều người chỉ nghĩ đến các bản tin phục vụ quá trình FIX. Tuy nhiên, trong tiêu chuẩn RTCM 3.x còn có nhóm bản tin 1021–1027, được định nghĩa để truyền các thông tin liên quan đến phép biến đổi datum, phép chiếu bản đồ và một số mô hình hiệu chỉnh phục vụ chuyển đổi sang hệ tọa độ địa phương.<br /> <br /> Theo tài liệu của RTCM SC-104 và một số nhà sản xuất phần mềm GNSS, nhóm bản tin này được thiết kế nhằm hỗ trợ việc chuyển đổi từ hệ quy chiếu GNSS sang hệ tọa độ địa phương. <br /> <br /> Tuy nhiên cần lưu ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi mạng CORS đều phát các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phải mọi bộ thu GNSS hoặc phần mềm RTK đều hỗ trợ đầy đủ việc giải mã và áp dụng các bản tin này.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc triển khai có thể khác nhau giữa các phiên bản RTCM, nhà sản xuất thiết bị và dịch vụ CORS.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì vậy, không nên mặc định rằng mọi hệ thống CORS đều truyền hoặc sử dụng RTCM 1021–1027.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1655118093874(1).jpg" style="width: 600px; height: 450px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Vì sao có phần mềm RTK không cần nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, người dùng không cần nhập thủ công, nhưng điều đó không có nghĩa quá trình chuyển đổi không tồn tại. <br /> <br /> Việc chuyển đổi có thể đã được thực hiện thông qua:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cơ sở dữ liệu CRS tích hợp trong phần mềm hoặc bộ điều khiển;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ffile hệ tọa độ (CRS/Projection) được import;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình do nhà sản xuất thiết lập;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin từ dịch vụ CORS;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc các cơ chế chuyển đổi riêng của phần mềm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Do đó, việc không phải nhập không đồng nghĩa với không sử dụng phép chuyển đổi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Khi nào vẫn phải nhập 7 tham số?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số tình huống vẫn cần người dùng thiết lập thủ công, chẳng hạn:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng Base cục bộ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Llàm việc với hệ tọa độ công trình;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng hệ tọa độ địa phương chưa có trong phần mềm;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu khảo sát cũ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc làm việc với các dự án có quy định riêng về hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, người dùng có thể phải:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập 7 tham số;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Import file hệ tọa độ;</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoặc thực hiện Site Calibration (Localization).</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. RTCM 1021–1027 có thay thế Site Calibration không?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Câu trả lời là không. Hai khái niệm này phục vụ những mục đích khác nhau.<br /> <br /> RTCM 1021–1027 là nhóm bản tin dùng để truyền các thông tin liên quan đến phép chuyển đổi hệ quy chiếu và phép chiếu bản đồ. Trong khi đó, Site Calibration (Localization) là quá trình thiết lập mối quan hệ giữa hệ tọa độ GNSS và hệ tọa độ của dự án thông qua các điểm khống chế ngoài thực địa.<br /> <br /> Site Calibration không thay thế phép chuyển đổi giữa các hệ quy chiếu mà chỉ hiệu chỉnh cục bộ để phù hợp với hệ tọa độ công trình. Ngay cả khi sử dụng mạng CORS và chọn đúng hệ tọa độ, nhiều dự án vẫn yêu cầu kiểm tra trên các mốc khống chế trước khi tiến hành đo chính thức.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Những lỗi thường gặp ngoài thực địa</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Qua thực tế sử dụng RTK, một số lỗi liên quan đến hệ tọa độ thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai datum hoặc realization.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai đơn vị của Rx, Ry, Rz (độ, giây hoặc radian).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai hệ số Scale (ppm hoặc hệ số tỷ lệ).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dùng nhầm hệ tọa độ công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tin tưởng trạng thái FIX nhưng không kiểm tra trên mốc khống chế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những nguyên nhân có thể khiến tọa độ sai hàng mét, thậm chí hàng chục mét dù máy vẫn báo FIX bình thường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">9. Người sử dụng RTK cần quan tâm đến điều gì?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với phần lớn công việc khảo sát, địa chính, thi công hoặc hoàn công, người dùng không nhất thiết phải nhớ chi tiết từng bản tin RTCM.<br /> <br /> Điều quan trọng hơn là:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo đúng Job / Project.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn đúng mountpoint khi dùng CORS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập đúng chiều cao anten.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại trên mốc khống chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ nhìn trạng thái FIX mà bỏ qua cấu hình hệ tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu kết quả đo lệch toàn bộ so với bản vẽ hoặc mốc ngoài thực địa, cần kiểm tra lại hệ tọa độ trước khi nghi ngờ máy RTK hoặc tín hiệu vệ tinh.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> RTCM 1021–1027, Helmert, Bursa-Wolf, 7 tham số và Site Calibration đều liên quan đến quá trình đưa kết quả GNSS về hệ tọa độ làm việc, nhưng chúng không phải là các khái niệm tương đương.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS xác định vị trí trong hệ quy chiếu toàn cầu, thường là WGS84 hoặc các realization gần với ITRF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">VN-2000 và hệ tọa độ công trình là các hệ tọa độ làm việc được sử dụng trong khảo sát, thiết kế và thi công tại Việt Nam.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7 tham số (Bursa-Wolf/Helmert) là một trong những mô hình phổ biến dùng để chuyển đổi tọa độ giữa các hệ quy chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTCM 1021–1027 là nhóm bản tin được thiết kế để hỗ trợ truyền thông tin liên quan đến phép biến đổi tọa độ và phép chiếu bản đồ. Tuy nhiên, việc các bản tin này có được sử dụng hay không còn phụ thuộc vào phiên bản RTCM, hệ thống CORS và phần mềm RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Site Calibration (Localization) là quá trình hiệu chỉnh cục bộ theo các điểm khống chế của dự án và không nên xem là sự thay thế cho các phép biến đổi giữa các hệ quy chiếu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với kỹ sư khảo sát và thi công, hiểu đúng vai trò của từng khái niệm sẽ giúp cấu hình RTK chính xác hơn, xử lý tốt các tình huống liên quan đến hệ tọa độ và hạn chế các sai lệch không đáng có ngoài thực địa.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Banner 230626 2.png" style="width: 800px; height: 533px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;"><u><strong>Tài liệu tham khảo</strong></u></span></span><br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">RTCM Special Committee 104 – <em>RTCM Standard for Differential GNSS (Multiple Signal Messages)</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IOGP – <em>Geomatics Guidance Note 7, Coordinate Conversions and Transformations</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">EPSG Geodetic Parameter Dataset & Guidance Note 7-2.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">ISO 19111 – <em>Geographic Information — Referencing by Coordinates</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Carlson Software – <em>RTCM 1021–1027 White Paper</em>.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Leica Geosystems – <em>Captivate Coordinate System Guide</em>.</span></span></li> </ul> ', 'images' => '20260625150050d64d8db365e7a0f663896871ecf242ce.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'RTK chuyển từ WGS84 sang VN-2000 như thế nào? Giải thích RTCM 1021–1027 và 7 tham số', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách RTK chuyển đổi từ WGS84 sang VN-2000, bản chất của RTCM 1021–1027, Bursa-Wolf Transformation, Helmert 7 tham số và vai trò của Site Calibration trong GNSS RTK.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '752', 'slug' => 'hieu-dung-ve-rtcm-1021-1027-helmert-bursa-wolf-7-tham-so-va-chuyen-doi-he-toa-do', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '555', 'rght' => '556', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '821', 'name' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân phổ biến và cách khắc phục!', 'code' => null, 'alias' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Với khả năng xác định tọa độ ở độ chính xác mức centimet, RTK đã trở thành công cụ gần như không thể thiếu đối với nhiều kỹ sư. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Máy GPS RTK ngày càng được sử dụng rộng rãi trong khảo sát địa hình, trắc địa công trình, thi công xây dựng, đo hoàn công và nhiều lĩnh vực liên quan đến GNSS. Trong điều kiện làm việc phù hợp và khi đạt trạng thái FIX, công nghệ RTK có thể cung cấp tọa độ với độ chính xác ở mức centimet. Chính vì vậy, RTK đã trở thành một trong những công cụ quan trọng đối với nhiều kỹ sư khảo sát và xây dựng. Tuy nhiên, trong quá trình sử dụng, không ít người gặp tình huống máy chỉ báo FLOAT, SINGLE hoặc liên tục chuyển đổi giữa FIX và FLOAT, dù tín hiệu Internet vẫn có hoặc số lượng vệ tinh khá nhiều.<br /> <br /> Vậy vì sao máy GPS RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.<br /> </em><br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>I. Trạng thái FIX trong RTK là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công nghệ GNSS RTK, trạng thái FIX (Fixed Solution) là khi bộ thu đã giải được số nguyên chu kỳ sóng mang (<em>Integer Ambiguity</em>). Khi đó, hệ thống có thể xác định tọa độ với độ chính xác ở mức centimet trong điều kiện làm việc phù hợp.<br /> <br /> Thông thường, máy RTK sẽ hiển thị một trong các trạng thái sau:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Single: Định vị độc lập bằng tín hiệu vệ tinh, sai số thường ở mức vài mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DGPS/SBAS: Có dữ liệu hiệu chỉnh, độ chính xác được cải thiện so với Single nhưng chưa đạt mức RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Float: Đã nhận dữ liệu cải chính nhưng chưa giải được hoàn toàn số nguyên chu kỳ sóng mang.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX: Định vị RTK với độ chính xác cao, đáp ứng phần lớn yêu cầu của công tác trắc địa.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lưu ý rằng, trạng thái FIX không đồng nghĩa với việc kết quả luôn chính xác tuyệt đối. Độ tin cậy của phép đo còn phụ thuộc vào điều kiện quan sát vệ tinh, môi trường làm việc, cấu hình hệ tọa độ và việc kiểm tra chất lượng số liệu ngoài thực địa.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 3 FIX.png" style="width: 620px; height: 566px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Không đủ vệ tinh hoặc hình học vệ tinh không thuận lợi</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để đạt được nghiệm FIX, máy RTK cần quan sát đồng thời đủ số lượng vệ tinh với sự phân bố hợp lý trên bầu trời. Máy có thể khó FIX hoặc FIX chậm khi làm việc trong các môi trường như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần nhà cao tầng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hẻm sâu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khu vực có nhiều cây lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dưới mái che hoặc trong nhà xưởng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa hình núi đá che khuất bầu trời.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài số lượng vệ tinh, chỉ số PDOP (Position Dilution of Precision) cũng ảnh hưởng đáng kể đến khả năng FIX. Dù quan sát được nhiều vệ tinh, nếu hình học vệ tinh không thuận lợi thì thời gian FIX vẫn có thể kéo dài hoặc nghiệm FIX kém ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 2 FIX.png" style="width: 600px; height: 400px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hiện tượng đa đường tín hiệu (Multipath)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đa đường tín hiệu là một trong những nguyên nhân phổ biến khiến máy RTK khó giữ FIX. Hiện tượng này xảy ra khi tín hiệu GNSS bị phản xạ qua các bề mặt như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tường kính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhà thép tiền chế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xe ô tô hoặc container.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặt nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hàng rào thép.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi bộ thu nhận đồng thời tín hiệu trực tiếp và tín hiệu phản xạ, việc xác định pha sóng mang trở nên khó khăn hơn, khiến nghiệm RTK thiếu ổn định.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 5 FIX.png" style="width: 620px; height: 348px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Khoảng cách giữa Base và Rover quá lớn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong hệ thống RTK Base – Rover truyền thống, khoảng cách giữa hai máy ảnh hưởng trực tiếp đến chất lượng dữ liệu cải chính. Trong điều kiện các yếu tố khác tương đương, khoảng cách giữa Base và Rover càng lớn thì việc giải nghiệm RTK thường càng khó khăn hơn.<br /> <br /> Khi khoảng cách tăng lên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số tầng điện ly và tầng đối lưu giữa hai điểm tăng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mức độ tương quan của tín hiệu giảm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian FIX có thể lâu hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giữ FIX giảm trong điều kiện khó.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK Network sử dụng CORS (VRS, iMAX hoặc Single Base), người dùng thường không làm việc với một trạm Base duy nhất. Khả năng FIX còn phụ thuộc vào mật độ mạng CORS, thuật toán xử lý của hệ thống và điều kiện quan sát vệ tinh.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 4 FIX.png" style="width: 620px; height: 410px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Kết nối Internet hoặc dữ liệu cải chính không ổn định</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi sử dụng RTK Network thông qua NTRIP, dữ liệu RTCM phải được truyền liên tục từ máy chủ CORS đến Rover. Một số nguyên nhân thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sóng 4G/5G yếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Wi-Fi không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Server CORS bị gián đoạn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Age of Differential tăng cao.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi đó, dữ liệu cải chính có thể bị trễ hoặc gián đoạn. Tùy từng hãng và từng dòng máy, một số thiết bị có thể duy trì nghiệm FIX trong thời gian ngắn nhờ các tính năng như RTK Hold, RTK Keep hoặc các cơ chế tương tự. Tuy nhiên, nếu việc gián đoạn kéo dài, máy thường sẽ chuyển sang FLOAT hoặc SINGLE.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Nhiễu điện từ và nhiễu vô tuyến</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS từ vệ tinh có công suất rất nhỏ khi đến mặt đất nên dễ bị ảnh hưởng bởi các nguồn nhiễu mạnh. Một số nguồn nhiễu thường gặp gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạm BTS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Radar.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường dây điện cao thế.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy phát sóng công suất lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống radio công nghiệp.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với RTK sử dụng Radio UHF, nhiễu vô tuyến còn có thể làm giảm chất lượng liên lạc giữa Base và Rover.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 6 FIX.png" style="width: 620px; height: 411px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Anten GNSS bị che khuất hoặc lắp đặt chưa phù hợp</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng thu tín hiệu của máy RTK phụ thuộc rất nhiều vào vị trí đặt anten. Một số tình huống có thể làm giảm chất lượng tín hiệu gồm:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đứng quá sát tường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đặt gần xe ô tô.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gần mái tôn hoặc kết cấu kim loại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten bị che bởi người đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cáp hoặc anten bị hư hỏng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lựa chọn vị trí đặt máy thông thoáng luôn là một trong những giải pháp đơn giản nhưng mang lại hiệu quả cao.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7. Điều kiện khí quyển và hoạt động không gian</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu GNSS chịu ảnh hưởng của tầng điện ly và tầng đối lưu. Trong các thời điểm như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bão từ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số Kp cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động điện ly mạnh.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">khả năng FIX có thể giảm so với điều kiện bình thường. Trong đa số trường hợp, mưa nhỏ không phải là nguyên nhân chính gây mất FIX.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Hình 1 FIX.png" style="width: 620px; height: 413px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">8. Firmware hoặc cấu hình máy chưa phù hợp<br /> </span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các bản cập nhật firmware mới có thể:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cải thiện thuật toán RTK.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thêm tín hiệu GNSS mới.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khắc phục các lỗi đã được nhà sản xuất ghi nhận.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng khả năng tương thích với các chuẩn RTCM.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, một số cấu hình chưa phù hợp cũng có thể ảnh hưởng đến khả năng FIX, chẳng hạn như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ bật một số hệ vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập góc cắt vệ tinh chưa hợp lý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai thông số truyền Radio giữa Base và Rover.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Người dùng nên cập nhật firmware theo khuyến nghị của nhà sản xuất và kiểm tra lại cấu hình trước khi làm việc ngoài hiện trường.</span></span><br /> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">9. Hiệu năng của từng dòng máy RTK</span></h3> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Không phải mọi bộ thu GNSS RTK đều có khả năng làm việc giống nhau. Hiệu năng của thiết bị phụ thuộc vào nhiều yếu tố như:</span></span><br /> <br /> <ul> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thiết kế anten GNSS.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Chip xử lý tín hiệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Thuật toán RTK.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Khả năng chống đa đường.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Tốc độ xử lý dữ liệu.</span></span></li> <li> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Mức độ tối ưu của phần mềm điều khiển.</span></span></li> </ul> <br /> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Vì vậy, ngay cả khi làm việc trong cùng điều kiện hiện trường, tốc độ FIX và khả năng giữ FIX giữa các dòng máy cũng có thể khác nhau.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10. Máy vẫn FIX nhưng tọa độ bị sai</span></span></h3> <h3> </h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi thường bị nhầm với hiện tượng "không FIX". Trong nhiều trường hợp, máy vẫn báo FIX bình thường nhưng tọa độ sai đáng kể do:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mô hình geoid.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai tham số chuyển đổi.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp tình huống này, cần kiểm tra lại cấu hình hệ quy chiếu trước khi nghi ngờ chất lượng tín hiệu GNSS.</span></span><br /> <p style="text-align: center;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/Esurvey.jpg" style="width: 620px; height: 324px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Làm thế nào để cải thiện khả năng FIX?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Để nâng cao khả năng FIX khi đo RTK, người dùng nên:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn vị trí đo thông thoáng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế làm việc gần các bề mặt phản xạ mạnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra số lượng vệ tinh và chỉ số PDOP.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo kết nối Internet hoặc Radio ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi chỉ số Age of Differential.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra đúng cấu hình hệ tọa độ trước khi đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cập nhật firmware theo khuyến nghị của nhà sản xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra định kỳ anten và phụ kiện.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm trên các điểm khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không chỉ dựa vào trạng thái FIX, nên kiểm tra trên mốc khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác. <br /> <br /> >>> Máy GPS RTK không phải lúc nào cũng đạt trạng thái FIX ngay sau khi khởi động. Khả năng FIX phụ thuộc vào nhiều yếu tố như điều kiện quan sát vệ tinh, hiện tượng đa đường, chất lượng dữ liệu cải chính, kết nối Internet hoặc Radio, điều kiện khí quyển, cấu hình thiết bị và môi trường làm việc.<br /> <br /> Trong thực tế, trạng thái FIX là điều kiện cần nhưng chưa phải điều kiện đủ để khẳng định chất lượng kết quả đo. Bên cạnh việc theo dõi trạng thái FIX, người sử dụng vẫn nên kết hợp kiểm tra trên mốc khống chế, đo lặp các điểm quan trọng và đánh giá điều kiện hiện trường nhằm đảm bảo độ tin cậy của số liệu.<br /> <br /> Hiểu rõ các nguyên nhân trên sẽ giúp kỹ sư trắc địa xử lý nhanh các tình huống ngoài thực địa, lựa chọn phương án đo phù hợp và khai thác hiệu quả hơn công nghệ GNSS RTK.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/TRẮC ĐỊA THÀNH ĐẠT (Logo) (Ảnh bìa Facebook).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 300px;" /></p> <br /> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ ngay </span><a href="https://zalo.me/0949322456" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><span style="margin: 0px; padding: 0px; color: rgb(255, 102, 0);"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt qua Zalo</strong></span></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để được tư vấn chọn máy phù hợp nhất!</span>', 'images' => '20260625110358e00121db9ef2b0248aadce5ad04f0e9d.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Vì sao máy GPS RTK không phải lúc nào cũng FIX được? 10 nguyên nhân và cách khắc phục', 'meta_key' => '', 'meta_des' => 'Máy GPS RTK không FIX được hoặc thường xuyên chuyển giữa FIX và FLOAT? Tìm hiểu 10 nguyên nhân phổ biến như vệ tinh, CORS, Internet, Base, nhiễu tín hiệu và cách khắc phục hiệu quả.', 'created' => '2026-06-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '537', 'slug' => 'vi-sao-may-gps-rtk-khong-phai-luc-nao-cung-fix-duoc-10-nguyen-nhan-pho-bien-va-cach-khac-phuc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '553', 'rght' => '554', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '820', 'name' => 'AI trong ngành trắc địa: Công việc nào sẽ được tự động hóa trước?', 'code' => null, 'alias' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span><o:p></o:p></p> <p data-end="686" data-start="526"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang dần xuất hiện trong nhiều công đoạn của quy trình khảo sát và thành lập bản đồ.</span></span><o:p></o:p></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu cách đây 10 năm, cuộc đua trong ngành trắc địa chủ yếu xoay quanh GNSS, UAV hay máy quét laser thì hiện nay AI đang trở thành một trong những công nghệ được nhắc đến nhiều nhất.</span></span></em><br /> <br /> <o:p></o:p></p> <p data-end="686" data-start="526"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ xử lý ảnh UAV, phân loại dữ liệu LiDAR đến tự động hóa các công việc văn phòng, AI đang giúp giảm đáng kể thời gian xử lý dữ liệu và hỗ trợ kỹ sư đưa ra quyết định nhanh hơn. Tuy nhiên, một câu hỏi được nhiều người quan tâm là: </span></span></em><em style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Công việc nào trong ngành trắc địa sẽ được AI tự động hóa trước?</strong></em></p> <p style="text-align: center;"> </p> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and BIM 2.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 450px; height: 299px;" /></p> <br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong quá trình khảo sát và thành lập bản đồ, khối lượng dữ liệu thu thập được ngày càng lớn. Một chuyến bay UAV có thể tạo ra hàng nghìn ảnh chụp.<br /> <br /> Một dự án LiDAR có thể tạo ra hàng triệu đến hàng tỷ điểm Point Cloud. <br /> <br /> Các hệ thống quan trắc hiện đại có thể ghi nhận dữ liệu liên tục 24/7.<br /> <br /> Khối lượng dữ liệu này vượt xa khả năng xử lý thủ công của con người. Đây chính là môi trường lý tưởng để AI phát huy hiệu quả. Theo nhiều nghiên cứu gần đây, AI đặc biệt phù hợp với các nhiệm vụ nhận dạng mẫu, phân loại dữ liệu, phát hiện bất thường và tự động hóa các quy trình xử lý lặp lại.</span></span><br /> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">A. AI đang được ứng dụng như thế nào trong trắc địa?</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Xử lý dữ liệu UAV và ảnh viễn thám</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lĩnh vực phát triển nhanh nhất hiện nay. AI có thể hỗ trợ:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng nhà cửa, đường giao thông và cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động phân loại lớp phủ bề mặt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện thay đổi địa hình qua nhiều thời điểm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ thành lập bản đồ hiện trạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều nghiên cứu đã chứng minh AI có khả năng tự động nhận dạng và trích xuất đối tượng từ ảnh UAV với độ chính xác cao, giúp giảm đáng kể khối lượng công việc số hóa thủ công.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and UAV.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Xử lý Point Cloud và LiDAR</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong các dự án quét laser mặt đất hoặc UAV LiDAR, việc phân loại Point Cloud thường tiêu tốn rất nhiều thời gian.<br /> AI hiện có thể:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tách điểm mặt đất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại cây xanh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận dạng công trình xây dựng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo mô hình 3D bán tự động.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số hệ thống hiện nay còn có khả năng xử lý dữ liệu LiDAR gần như theo thời gian thực và tự động phân loại địa vật với mức can thiệp thủ công rất thấp.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and Lidar.jpg" style="width: 500px; height: 333px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Thành lập và cập nhật bản đồ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong lĩnh vực GIS và bản đồ, AI đang được ứng dụng để:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tự động số hóa đối tượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất ranh giới địa vật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lỗi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện các bất thường về hình học và thuộc tính.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các nghiên cứu về bản đồ địa chính và bản đồ nền cho thấy AI có tiềm năng rút ngắn đáng kể thời gian thành lập và cập nhật dữ liệu bản đồ.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Ai and Mapping(1).jpg" style="width: 600px; height: 300px;" /></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Quan trắc công trình và giám sát biến dạng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các công trình cầu, đập, nhà cao tầng hoặc mỏ khai thác, dữ liệu quan trắc thường được thu thập liên tục trong thời gian dài AI có thể giúp:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát hiện số liệu bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi xu hướng chuyển vị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự báo nguy cơ lún hoặc nghiêng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ cảnh báo sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây được xem là một trong những hướng ứng dụng có tiềm năng lớn vì AI rất giỏi trong việc phát hiện các quy luật ẩn trong tập dữ liệu dài hạn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Ai and monitoring.jpg" style="width: 600px; height: 335px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Công việc văn phòng</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu phải lựa chọn một nhóm công việc có khả năng được AI tự động hóa trước trong ngành trắc địa, thì đó có lẽ là các công việc văn phòng mang tính lặp lại và xử lý dữ liệu. Các công việc như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển đổi dữ liệu giữa các định dạng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tổng hợp số liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra các lỗi dữ liệu đơn giản.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu, bảng biểu và báo cáo kỹ thuật.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trích xuất thông tin từ nhật ký hoặc sổ đo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phân loại và sắp xếp dữ liệu dự án.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây đều là những công việc có quy trình tương đối rõ ràng và ít phụ thuộc vào đánh giá chuyên môn của kỹ sư. Trên thực tế, nhiều phần mềm hiện nay đã bắt đầu tích hợp các tính năng tự động hóa dạng này. AI chỉ đang giúp các quy trình đó trở nên thông minh và hiệu quả hơn.</span></span><br /> <br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ai and office.jpg" style="width: 600px; height: 336px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">B. Công việc nào khó bị AI thay thế?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực tế hiện nay, đây có lẽ là nhóm ứng dụng AI gần gũi nhất với nhiều kỹ sư trắc địa. Thay vì mất hàng giờ để viết các công cụ Excel, Python hoặc VBA, nhiều kỹ sư đã bắt đầu sử dụng AI để hỗ trợ:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Viết chương trình chuyển đổi tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán stakeout tim tuyến, cọc khoan nhồi.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra dữ liệu đo đạc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển ảnh sổ đo thành bảng tính.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tạo biểu mẫu nghiệm thu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Soạn thảo báo cáo kỹ thuật.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AI không thực hiện thay công việc chuyên môn, nhưng có thể giúp rút ngắn đáng kể thời gian xử lý các công việc lặp lại.<br /> <br /> >>> Nếu GNSS giúp người làm trắc địa đo nhanh hơn, UAV giúp thu thập dữ liệu nhanh hơn thì AI có thể giúp xử lý dữ liệu nhanh hơn.</span></span> <p data-end="2115" data-start="1963"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong tương lai gần, lợi thế có thể không nằm ở việc ai sử dụng AI hay không, mà nằm ở việc ai biết khai thác AI hiệu quả hơn trong công việc hàng ngày. </span></span><br /> <br /> <strong><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="text-align: justify; margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="color: rgb(51, 51, 51); text-align: justify; margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span></strong></p> ', 'images' => '20260617172058d2979529aed88d220bef4d1f33c5f441.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'AI trong trắc địa: Công việc nào sẽ được tự động hóa trước?', 'meta_key' => '', 'meta_des' => 'AI đang được ứng dụng ngày càng nhiều trong ngành trắc địa, từ xử lý UAV, LiDAR, bản đồ đến lập báo cáo kỹ thuật. Vậy công việc nào sẽ được AI tự động hóa trước? Tìm hiểu trong bài viết này.', 'created' => '2026-06-17', 'modified' => '2026-07-11', 'status' => '1', 'view' => '670', 'slug' => 'ai-trong-nganh-trac-dia-cong-viec-nao-se-duoc-tu-dong-hoa-truoc', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '551', 'rght' => '552', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '819', 'name' => 'BIM và LiDAR đang dùng những định dạng dữ liệu nào? Giải thích IFC, RVT, NWD, LAS, LAZ từ A-Z', 'code' => null, 'alias' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.</span></span><br /> ', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Trong công tác đo đạc, khảo sát, BIM và quản lý xây dựng hiện nay, kỹ sư ngày càng phải làm việc với nhiều loại dữ liệu khác nhau. Nếu trước đây các định dạng phổ biến chủ yếu là CSV, TXT, DXF hoặc DWG thì ngày nay các dự án BIM và quét laser 3D đã xuất hiện thêm nhiều định dạng mới như IFC, RVT, NWD hay LAS.<br /> <br /> Vậy các định dạng này dùng để làm gì và khác nhau như thế nào?</em></span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Nhóm dữ liệu BIM</span></span></h2> <br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 IFC (Industry Foundation Classes)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC là định dạng trao đổi dữ liệu BIM mở được phát triển bởi buildingSMART. Mục đích chính của IFC là cho phép các phần mềm BIM khác nhau trao đổi mô hình với nhau mà không phụ thuộc vào một hãng phần mềm cụ thể.</span></span><br /> <br /> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>- Ưu điểm:</strong> Không phụ thuộc vào một nhà cung cấp phần mềm cụ thể, hỗ trợ phối hợp giữa nhiều bộ môn và phù hợp cho việc bàn giao, lưu trữ dữ liệu dự án trong thời gian dài.</span></span><br /> <br /> <o:p></o:p></p> <p data-end="608" data-start="295"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="307" data-start="295">- Hạn chế:</strong> Không phải phần mềm BIM nào cũng hỗ trợ đầy đủ mọi tính năng của IFC. Trong một số trường hợp, các tham số đối tượng, Family phức tạp hoặc dữ liệu chuyên biệt có thể bị mất hoặc thay đổi khi chuyển đổi. Ngoài ra, khả năng tương thích còn phụ thuộc vào phiên bản IFC sử dụng (IFC2x3, IFC4, IFC4.3...).</span></span><br /> <br /> <o:p></o:p></p> <p data-end="858" data-start="613"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="634" data-start="613">- Ứng dụng thực tế:</strong> IFC thường được sử dụng để trao đổi dữ liệu giữa các bộ môn, bàn giao mô hình BIM cho chủ đầu tư và lưu trữ dữ liệu dự án theo định dạng mở (vendor-neutral), giúp giảm sự phụ thuộc vào một phần mềm hoặc nhà cung cấp cụ thể.</span></span><o:p></o:p></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Autodesk Revit, Tekla Structures, Archicad, Bentley OpenBuildings đều có thể xuất hoặc nhập file IFC nên IFC thường được xem là "ngôn ngữ chung" của BIM.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 BCF (BIM Collaboration Format)</span></span></h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">BCF được sử dụng để trao đổi các vấn đề (Issue), bình luận (Comment), góc nhìn (Viewpoint) và vị trí cần xử lý trong mô hình BIM. BCF không chứa mô hình 3D mà chỉ lưu thông tin phục vụ quá trình phối hợp giữa các bên.</span> <p> <br /> <strong data-end="337" data-start="325" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Dung lượng nhỏ, dễ chia sẻ và tích hợp với nhiều nền tảng BIM như Autodesk Construction Cloud (BIM 360), Solibri, Tekla BIMsight và các hệ thống quản lý Issue khác. BCF đặc biệt hữu ích trong các cuộc họp phối hợp (Coordination Meeting), kiểm tra va chạm (Clash Detection) và quy trình QA/QC.</span></p> <p data-end="630" data-start="325"> <br /> <strong data-end="653" data-start="635" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Lưu ý thực tế:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> BCF thường được sử dụng kèm với các file mô hình như IFC, RVT hoặc NWD để người dùng có thể xem đầy đủ bối cảnh của vấn đề. Một ưu điểm quan trọng của BCF là khả năng theo dõi lịch sử xử lý (Traceability), giúp liên kết giữa vấn đề được phát hiện, người phụ trách và các thay đổi được thực hiện trong dự án.</span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 RVT</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RVT là định dạng dự án của Autodesk Revit. Một file RVT có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiến trúc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết cấu</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống MEP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số vật liệu</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng BIM được sử dụng rất phổ biến hiện nay.</span></span><br /> <br /> <p data-end="355" data-start="108"> <strong data-end="372" data-start="360" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Ưu điểm:</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> Lưu giữ đầy đủ tham số đối tượng, lịch sử làm việc, Worksharing và các thông tin thiết kế chi tiết. RVT là định dạng mang lại khả năng làm việc đầy đủ nhất trong môi trường Revit.</span></p> <p data-end="552" data-start="360"> </p> <p data-end="808" data-start="557"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="569" data-start="557">Hạn chế:</strong> RVT là định dạng độc quyền (proprietary) của Autodesk. Các phần mềm BIM khác thường không thể đọc hoặc khai thác đầy đủ toàn bộ thông tin trong file RVT. Vì vậy, khi cần phối hợp đa nền tảng, người dùng thường phải xuất sang IFC hoặc NWD.</span></span><br /> </p> <p data-end="1161" data-start="813"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong data-end="831" data-start="813">Lưu ý thực tế:</strong> RVT thường được sử dụng trong nội bộ đơn vị thiết kế hoặc giữa các bên cùng sử dụng Revit. Khi cần trao đổi dữ liệu với chủ đầu tư, nhà thầu hoặc các đơn vị sử dụng phần mềm khác, IFC thường là lựa chọn phổ biến để bàn giao mô hình BIM, trong khi NWD thường được sử dụng cho công tác phối hợp và kiểm tra mô hình trên Navisworks.</span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 RFA</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA là định dạng Family của Revit. Family có thể hiểu là thư viện các đối tượng BIM như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cửa sổ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị điện</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết bị cơ điện</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RFA tương tự như Block trong AutoCAD nhưng có nhiều thông tin tham số hơn.<br /> <br /> <strong>Ưu điểm</strong>: RFA cho phép mô tả đối tượng bằng các tham số chi tiết như kích thước, vật liệu, mã thiết bị và thông tin kỹ thuật. Nhờ đó, các đối tượng có thể dễ dàng tái sử dụng giữa nhiều dự án khác nhau, đồng thời giúp chuẩn hóa dữ liệu BIM trong doanh nghiệp.<br /> <br /> <strong>Hạn chế</strong>: RFA là định dạng riêng của Revit nên chủ yếu hoạt động trong hệ sinh thái Autodesk. Khi xuất sang IFC, các Family phức tạp có thể bị đơn giản hóa hoặc mất một phần tham số do sự khác biệt giữa các chuẩn dữ liệu BIM.<br /> <br /> <strong>Lưu ý</strong>: Nên tiêu chuẩn hóa thư viện Family trước khi triển khai dự án hoặc bàn giao dữ liệu. Đối với các Family quan trọng, cần quản lý phiên bản (Version Control) và tài liệu hóa các tham số chính để đảm bảo tính nhất quán giữa các bộ môn và các giai đoạn của dự án.</span></span><br /> <br /> <h3> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.5 RTE</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RTE là định dạng Template của Revit. Đây là file mẫu được sử dụng khi khởi tạo dự án mới nhằm đảm bảo tiêu chuẩn hóa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Family</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy ước đặt tên</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông số dự án</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/BIM 2(1).jpg" style="width: 662px; height: 463px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Nhóm dữ liệu Navisworks</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 NWD</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD là định dạng mô hình tổng hợp của Autodesk Navisworks. File NWD có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều mô hình BIM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Clash Detection</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Markup</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu phối hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là định dạng thường được sử dụng trong các cuộc họp BIM hoặc bàn giao mô hình.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 NWC</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWC là định dạng trung gian của Navisworks. File NWC thường nhẹ hơn NWD và được sử dụng để tăng tốc quá trình nạp mô hình.<br /> Nhiều dự án BIM sử dụng NWC làm định dạng trao đổi nội bộ giữa các bộ môn.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.3 NWV</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">NWV là định dạng Viewpoint của Navisworks. Nó lưu các thông tin về:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc nhìn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái hiển thị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thiết lập quan sát mô hình</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với NWD hoặc NWC, NWV ít được sử dụng hơn.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Navisworks.jpg" style="width: 680px; height: 392px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Nhóm dữ liệu Point Cloud</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 LAS (LASer File Format)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS là định dạng tiêu chuẩn lưu trữ dữ liệu Point Cloud từ công nghệ LiDAR. Mỗi điểm trong file LAS có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ X</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Y</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ Z</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Intensity</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GPS Time</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Classification</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Màu RGB</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS thường được tạo ra từ: UAV LiDAR; Mobile Mapping; SLAM Scanner; Máy quét laser mặt đất (TLS); LiDAR hàng không. Một file LAS có thể chứa từ hàng triệu đến hàng trăm triệu điểm.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 LAZ</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LAZ là phiên bản nén của LAS. Tương tự như DXF, DWG; ZIP và thư mục dữ liệu. <br /> <br /> LAZ giúp giảm đáng kể dung lượng lưu trữ nhưng vẫn giữ nguyên thông tin Point Cloud. Hiện nay phần lớn các dự án LiDAR đều sử dụng LAZ để tối ưu dung lượng và tốc độ truyền dữ liệu.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lidar format.jpg" style="width: 565px; height: 353px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. So sánh nhanh các nhóm dữ liệu</span></span></h2> <br /> <table border="1" cellpadding="0" cellspacing="3" style="width: 100%"> <tbody> <tr> <td style="width: 128px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nhóm dữ liệu</strong></span></span></td> <td style="width: 160px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Định dạng phổ biến</strong></span></span></td> <td style="width: 212px; text-align: center;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Mục đích</strong></span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Tọa độ điểm</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý điểm đo, stakeout</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">CAD</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF, DWG</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Bản vẽ kỹ thuật 2D/3D</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">BIM</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">IFC, RVT, RFA, RTE, BCF</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô hình công trình số</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Navisworks</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">NWD, NWC, NWV</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Phối hợp và kiểm tra mô hình</span></span></td> </tr> <tr> <td style="width:128px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Cloud</span></span></td> <td style="width:160px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">LAS, LAZ</span></span></td> <td style="width:212px;"> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">Dữ liệu quét laser và LiDAR</span></span></td> </tr> </tbody> </table> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Sự phát triển của BIM, UAV LiDAR và công nghệ quét laser 3D đang làm thay đổi cách dữ liệu được tạo ra và sử dụng trong ngành xây dựng.<br /> <br /> Nếu CSV và DXF vẫn là những định dạng quen thuộc đối với kỹ sư đo đạc thì IFC, RVT, NWD hay LAS đang trở thành những định dạng ngày càng phổ biến trong các dự án hiện đại.<br /> <br /> Việc hiểu được chức năng của từng loại dữ liệu sẽ giúp kỹ sư lựa chọn đúng định dạng, trao đổi thông tin hiệu quả hơn và tránh nhiều sai sót trong quá trình triển khai dự án.</span></span><br /> <br /> <h2 data-end="2546" data-start="2275" id="lien-he-trac-dia-thanh-dat-de-duoc-tu-van-giai-phap-phu-hop-voi-tung-loai-cong-trinh" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif;">Trắc Địa Thành Đạt </a><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">để được tư vấn và hỗ trợ tốt nhất!</span><br /> <br /> <span style="display: none;"> </span><span style="display: none;"> </span><img alt="" src="/admin/webroot/upload/image/images/bim 5.jpg" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; color: rgb(34, 34, 34); width: 678px; height: 452px;" /><span style="display: none;"> </span><span style="display: none;"> </span></h2> <p> </p> ', 'images' => '2026061315274748a34b386d28d2887f07eb97a60c9540.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Ngoài CSV và DXF: Tìm hiểu các định dạng IFC, RVT, NWD, LAS trong BIM và quét laser 3D', 'meta_key' => '', 'meta_des' => 'iFC, RVT, NWD, LAS, LAZ là gì? Tìm hiểu các định dạng dữ liệu BIM, Navisworks và Point Cloud phổ biến trong xây dựng, đo đạc, UAV LiDAR và quét laser 3D.', 'created' => '2026-06-13', 'modified' => '2026-07-12', 'status' => '1', 'view' => '810', 'slug' => 'bim-va-lidar-dang-dung-nhung-dinh-dang-du-lieu-nao-giai-thich-ifc-rvt-nwd-las-laz-tu-a-z', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '549', 'rght' => '550', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '818', 'name' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'code' => null, 'alias' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></p> <p> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></p> ', 'content' => '<p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhìn vào một chiếc GNSS RTK mới ra mắt gần đây bên cạnh các thông số quen thuộc như số lượng kênh vệ tinh, khả năng theo dõi đa hệ GNSS hay tốc độ FIX, các hãng hiện nay đang dành nhiều sự chú ý hơn cho những công nghệ như Camera AR, IMU và Laser Survey.</span></span></em></p> <p> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều đó cho thấy một xu hướng đáng chú ý đang diễn ra trong ngành đo đạc: cuộc đua giữa các hãng GNSS đang dần chuyển từ phần cứng vệ tinh sang trải nghiệm làm việc ngoài thực địa.</span></span></em></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Từ cuộc đua vệ tinh đến cuộc đua trải nghiệm ngoài thực địa</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng 10 năm trước, khi một hãng giới thiệu thế hệ máy GNSS RTK mới, những thông số thường được nhắc đến nhiều nhất là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo dõi được bao nhiêu kênh vệ tinh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ những hệ thống GNSS nào.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">FIX nhanh hơn bao nhiêu giây.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao hơn bao nhiêu milimet.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời điểm đó, đây thực sự là những yếu tố tạo nên sự khác biệt giữa các sản phẩm trên thị trường. Các hãng liên tục nâng số lượng kênh từ vài trăm lên hàng nghìn kênh. Những hệ thống mới như Galileo, BeiDou hay QZSS lần lượt được bổ sung. Công nghệ xử lý tín hiệu cũng ngày càng hoàn thiện.<br /> <br /> Tuy nhiên, khi nhìn vào thị trường hiện nay, có thể thấy cuộc đua đó đang dần thay đổi. Hầu hết các dòng RTK hiện đại đều đã hỗ trợ đa hệ vệ tinh, đa tần số và có khả năng đạt độ chính xác centimet trong điều kiện làm việc bình thường. Khi khoảng cách công nghệ về phần cứng GNSS ngày càng thu hẹp, các hãng bắt đầu tìm kiếm một hướng đi mới - Đó là nâng cao trải nghiệm làm việc ngoài thực địa.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Điều mà kỹ sư đo đạc thực sự quan tâm là gì?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với người sử dụng máy RTK ngoài công trường, câu hỏi quan trọng nhất thường không phải: "Máy này theo dõi được bao nhiêu vệ tinh?" mà là:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi hoàn thành công việc nhanh hơn không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp tôi đo được những vị trí khó không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm được thời gian đi lại ngoài hiện trường không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giảm số lượng thiết bị phải mang theo không?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có giúp công việc an toàn hơn không?</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây chính là lý do nhiều công nghệ mới xuất hiện trong vài năm gần đây.<br /> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. IMU – Bước thay đổi đầu tiên</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một trong những cải tiến có ảnh hưởng lớn nhất là công nghệ IMU. Trước đây, việc giữ sào GNSS thẳng đứng gần như là yêu cầu bắt buộc.<br /> Những vị trí như: chân tường, góc công trình, mép hàng rào hay khu vực cây cối thường gây khó khăn cho người đo. Nhưng IMU đã thay đổi hoàn toàn cách làm việc này. Người sử dụng có thể nghiêng sào trong một phạm vi nhất định mà vẫn duy trì được độ chính xác cao.<br /> <br /> Ngày nay, bù nghiêng gần như đã trở thành tính năng tiêu chuẩn trên các dòng RTK mới.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (1).png" style="width: 680px; height: 383px;" /></span></span></p> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Camera – Khi RTK bắt đầu "nhìn thấy" hiện trường</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau IMU, các hãng tiếp tục đưa camera lên Rover GNSS. Ban đầu, nhiều người cho rằng đây chỉ là một tính năng mang tính trình diễn công nghệ.<br /> Tuy nhiên, thực tế camera đã mở ra nhiều ứng dụng mới:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhận hiện trạng công trình.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo điểm từ ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout bằng thực tế tăng cường (AR).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra lại dữ liệu sau khi khảo sát.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này giúp RTK không chỉ cung cấp tọa độ mà còn lưu giữ được bối cảnh thực tế của hiện trường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image (2).png" style="width: 680px; height: 678px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Laser Survey – Xu hướng đáng chú ý nhất hiện nay</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu IMU giúp người dùng đo nghiêng và camera giúp ghi nhận hình ảnh, thì Laser Survey đang hướng tới một mục tiêu khác. Đó là đo được những vị trí mà trước đây Rover GNSS khó hoặc không thể tiếp cận.<br /> Hãy hình dung một số tình huống quen thuộc mà anh em có thể gặp khi trực tiếp đo ngoài công trình: <br /> - Mép taluy cao.<br /> - Hồ điều hòa.<br /> - Bờ kênh.<br /> - Hố đào sâu.<br /> - Mái nhà.<br /> - Tường chắn.<br /> - Khu vực đang thi công nguy hiểm.<br /> <br /> Với RTK truyền thống, muốn lấy tọa độ chính xác, người đo thường phải đưa sào đến tận vị trí cần đo. Điều này không phải lúc nào cũng thuận lợi hoặc an toàn. Laser Survey ra đời để giải quyết vấn đề đó. Thay vì đưa anten GNSS đến điểm đo, người sử dụng chỉ cần hướng tia laser đến mục tiêu. Phần mềm sẽ kết hợp dữ liệu từ GNSS, IMU và laser để tính toán tọa độ của điểm cần khảo sát.</span></span><br /> <p data-end="1209" data-start="1006"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tất nhiên, việc đo các vị trí khó tiếp cận bằng tia laser không phải là điều hoàn toàn mới trong ngành đo đạc. Máy toàn đạc điện tử đã sử dụng công nghệ đo không gương (Reflectorless) từ nhiều năm trước. Điểm khác biệt là Laser Survey đang đưa khả năng này lên nền tảng Rover GNSS, cho phép người dùng vừa khai thác ưu thế định vị vệ tinh ngoài hiện trường, vừa thực hiện các phép đo từ xa trong những tình huống mà trước đây thường phải kết hợp thêm máy toàn đạc hoặc các thiết bị khác.</span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lý do nhiều chuyên gia nhận định rằng Laser Survey có thể là một trong những bước phát triển đáng chú ý nhất của Rover GNSS trong những năm gần đây.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/i85-gnss-imu-dual-cameras-laser-land-surveying.jpg" style="width: 472px; height: 354px;" /></span></span></p> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>6. Vì sao các hãng TQ đầu tư mạnh vào hướng đi này?</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một lý do quan trọng là thị trường đã thay đổi. Trước đây, người mua thường so sánh:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu kênh vệ tinh?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bao nhiêu tần số?</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác bao nhiêu milimet?</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngày nay, người dùng bắt đầu quan tâm nhiều hơn đến các yếu tố như:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Năng suất làm việc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trải nghiệm sử dụng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính linh hoạt ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng giải quyết các tình huống thực tế.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều này khiến các hãng phải chuyển hướng nghiên cứu: không chỉ phát triển bộ thu GNSS tốt hơn, mà còn phải tìm cách giúp người dùng làm việc hiệu quả hơn.<br /> </span></span> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>7. RTK đang dần trở thành nền tảng tích hợp cảm biến</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu quan sát sự phát triển của các thế hệ RTK gần đây, có thể thấy một xu hướng rất rõ. RTK không còn đơn thuần là thiết bị thu tín hiệu vệ tinh mà nó đang trở thành một nền tảng tích hợp nhiều cảm biến:<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GNSS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">IMU.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Laser.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công nghệ xử lý hình ảnh.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các thuật toán tự động hóa và trí tuệ nhân tạo (AI).</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi công nghệ đều nhằm giải quyết một khó khăn cụ thể ngoài công trường.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/image(1).png" style="width: 680px; height: 680px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Có thể nói, khi khả năng thu tín hiệu GNSS giữa các thế hệ thiết bị ngày càng tiệm cận nhau, cuộc cạnh tranh của các hãng đang dần chuyển sang một hướng mới: giúp kỹ sư hoàn thành công việc nhanh hơn, an toàn hơn và thuận tiện hơn ngoài thực địa.</span></span> <p data-end="2546" data-start="2275"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Camera, IMU và Laser Survey có thể chỉ là những bước khởi đầu cho xu hướng đó. Trong tương lai, GNSS RTK nhiều khả năng sẽ không chỉ là thiết bị định vị vệ tinh, mà sẽ trở thành một nền tảng tích hợp nhiều cảm biến phục vụ công tác khảo sát và thi công ngoài hiện trường. </span></span><br /> </p> <h2 data-end="2546" data-start="2275"> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">>>> Liên hệ </span><a href="https://www.facebook.com/thanhdatsurvey.jsc" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration: none; transition: color 0.2s linear; font-size: 13px; font-family: tahoma, geneva, sans-serif; text-align: justify;"><strong style="margin: 0px; padding: 0px; font-weight: bold;">Trắc Địa Thành Đạt </strong></a><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">để được tư vấn và hỗ trợ tốt nhất!</span></h2> ', 'images' => '2026061214390046f6215956d7c46255d00263c715c9d4.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Xu hướng phát triển GNSS RTK: Vì sao các hãng Trung Quốc chuyển từ cuộc đua phần cứng sang trải nghiệm ngoài thực địa?', 'meta_key' => '', 'meta_des' => 'Khám phá xu hướng phát triển mới của các hãng GNSS RTK như CHCNAV, eSurvey và nhiều thương hiệu khác. Từ IMU, Camera đến Laser Survey, cuộc đua công nghệ đang chuyển từ phần cứng GNSS sang nâng cao trải nghiệm làm việc ngoài thực địa.', 'created' => '2026-06-12', 'modified' => '2026-07-11', 'status' => '1', 'view' => '778', 'slug' => 'xu-huong-phat-trien-gnss-rtk-vi-sao-cac-hang-chuyen-tu-cuoc-dua-phan-cung-sang-trai-nghiem-ngoai-thuc-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '547', 'rght' => '548', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '817', 'name' => 'Định dạng file RTK: Hướng dẫn xuất, nhập và xử lý lỗi thường gặp trong đo đạc', 'code' => null, 'alias' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.</span></span>', 'content' => '<p> <em><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong thực tế, công việc đo đạc không kết thúc khi Rover báo FIX hoặc khi hoàn thành việc thu thập tọa độ ngoài hiện trường. Sau bước đo đạc, dữ liệu thường phải trải qua nhiều công đoạn như:</span></em><br /> </p> <ul> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển về văn phòng.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biên tập trên AutoCAD hoặc CASS.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý trên Civil 3D, Trimble Business Center (TBC), Leica Infinity.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra trên Google Earth.</span></span></em></li> <li> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển giao cho chủ đầu tư hoặc đơn vị thiết kế.</span></span></em></li> </ul> <br /> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ cần xuất sai định dạng hoặc thiếu dữ liệu, toàn bộ quy trình phía sau có thể bị gián đoạn. Theo tài liệu của Trimble Business Center, hệ sinh thái khảo sát hiện nay hỗ trợ rất nhiều định dạng khác nhau như CSV, TXT, DXF, DWG, KML, SHP, XML, JOB, RINEX... phục vụ các mục đích sử dụng khác nhau.<br /> </span></span></em> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/61sq3Qk7zvL.jpg" style="width: 600px; height: 600px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Các định dạng file dữ liệu phổ biến ở máy RTK</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 CSV (*.csv)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV (Comma Separated Values) là định dạng được sử dụng nhiều nhất trong công tác đo đạc hiện nay. Thông thường file CSV có thể chứa:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số hiệu điểm (Point ID)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Code</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi chú</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ: </strong></u> Point,X,Y,H,Code<br /> P1,234567.123,1234567.456,15.234,COTDIEN</em><br /> <br /> <u><strong>Ưu điểm</strong></u></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở được bằng Excel.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dung lượng nhỏ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ gửi Email, Zalo.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ nhập vào Civil 3D, AutoCAD, QGIS, TBC.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><u><strong>Nhược điểm</strong></u></span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có tiêu chuẩn cấu trúc thống nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hai file CSV có thể chứa các trường dữ liệu khác nhau.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Leica Captivate và CHCNAV LandStar, người dùng có thể tự định nghĩa cấu trúc CSV xuất ra bằng cách thêm hoặc bớt các trường dữ liệu cần thiết.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên.png" style="width: 480px; height: 480px;" /> </span></span></p> <p style="text-align: center;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ví dụ về File tọa độ mốc</span></span></em></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.2 TXT (*.txt)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">TXT là file dữ liệu dạng văn bản thuần và thường được sử dụng khi:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuyển dữ liệu giữa các phần mềm.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập dữ liệu stakeout.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉnh sửa thủ công bằng Notepad hoặc Notepad++.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ưu điểm lớn nhất là khả năng tùy biến cấu trúc dữ liệu.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.3 DAT (*.dat)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT là định dạng quen thuộc với nhiều đơn vị thành lập bản đồ địa hình với nhiều ứng dụng như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CASS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thành lập bản đồ địa hình.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại Việt Nam, DAT vẫn là định dạng được sử dụng rất nhiều trong công tác đo vẽ địa hình.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.4 DXF (*.dxf)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF là định dạng trao đổi dữ liệu CAD. Theo Leica Captivate, DXF được sử dụng để chuyển trực tiếp điểm, đường, layer và các đối tượng CAD giữa hiện trường và văn phòng.<br /> <br /> <strong><u>Ưu điểm</u></strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mở trực tiếp trên AutoCAD.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không cần nhập tọa độ thủ công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giữ được nhiều thông tin bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5 KML (*.kml)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML là định dạng của Google Earth với nhiều ứng dụng như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra vị trí điểm ngoài thực địa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối chiếu dữ liệu khảo sát.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ nhanh vị trí công trình.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Trimble, KML/KMZ là một trong những định dạng phổ biến để trao đổi dữ liệu tọa độ địa lý 3D.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.6 SHP (*.shp)</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP (Shapefile) là định dạng GIS được sử dụng trong:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">QGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">ArcGIS.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống quản lý dữ liệu không gian.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica Captivate còn cho phép xuất thêm các trường chất lượng điểm đo và thông tin tọa độ vào Shapefile.<br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7 XLS / XLSX</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số phần mềm cho phép xuất trực tiếp sang Excel với ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ chỉnh sửa.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ lập bảng tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp cho hồ sơ hoàn công.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Khi nào nên chọn CSV, DAT, DXF hay SHP?</span></span></h2> <br /> <table border="0" cellpadding="0" style="width: 100%"> <tbody> <tr> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mục đích</span></span></strong><br /> </td> <td> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng khuyến nghị</span></span></strong><br /> </td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gửi tọa độ cho chủ đầu tư</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, XLSX</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập AutoCAD</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DAT, DXF</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập Civil 3D</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Google Earth</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">KML</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GIS</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">SHP</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout công trình</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV, TXT</span></span></td> </tr> <tr> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chia sẻ dữ liệu nhanh</span></span></td> <td> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CSV</span></span></td> </tr> </tbody> </table> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/c64e8674de5294e51c9bd4133e27d964aede72fb_2_1024x516.png" style="width: 600px; height: 302px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Hướng dẫn xuất dữ liệu trên máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù giao diện giữa Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay Matesurvey (Geomate) có khác nhau nhưng quy trình cơ bản tương đối giống nhau với các bước như sau:<br /> <br /> - <strong>Bước 1</strong>: Mở Project hoặc Job cần xuất.<br /> <br /> - <strong>Bước 2</strong>: Kiểm tra danh sách điểm đã lưu.<br /> <br /> - <strong>Bước 3</strong>:Chọn Export Data.<br /> <br /> - <strong>Bước 4</strong>: Chọn định dạng: <em>CSV; ;TXT; DAT; DXF; KML ; SHP</em><br /> <br /> - <strong>Bước 5</strong>: Kiểm tra cấu trúc dữ liệu xuất. Một số phần mềm cho phép tùy chỉnh:<br /> <em>Point ID<br /> Easting<br /> Northing<br /> Elevation<br /> Code<br /> Rod Height<br /> Antenna Height<br /> PDOP<br /> Trạng thái FIX/FLOAT</em><br /> <br /> - <strong>Bước 6</strong>: Lưu file và kiểm tra lại trước khi gửi.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Hướng dẫn nhập dữ liệu vào máy RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài việc xuất dữ liệu từ máy RTK, nhu cầu nhập dữ liệu vào máy để phục vụ công tác bố trí công trình (Stake Out), dẫn đường hoặc kiểm tra tọa độ cũng rất phổ biến. Hiện nay hầu hết các phần mềm đo đạc như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey), MateSurvey (Geomate) đều hỗ trợ nhập các định dạng phổ biến như:CSV (*.csv); TXT (*.txt); DXF (*.dxf). Trong đó CSV là định dạng được sử dụng nhiều nhất.<br /> <br /> <strong>- Bước 1: </strong>Chuẩn bị File dữ liệu<br /> Xuất dữ liệu từ:AutoCAD; Civil 3D; Excel; QGIS; TBC; Leica Infinityvề định dạng CSV hoặc TXT.<br /> <br /> <strong>- Bước 2: </strong>Chép File vào sổ tay<br /> Có thể thực hiện bằngcáp USB, bluetooth, Wi-Fi, đồng bộ Cloud (tùy thiết bị).<br /> <br /> <strong>- Bước 3: </strong>Nhập dữ liệu<br /> Project > Import > Chọn định dạng file > Chọn file cần nhập.<br /> <br /> <strong>- Bước 4: </strong>Khai báo cấu trúc dữ liệu<br /> Đây là bước quan trọng nhất.Người dùng cần khai báo chính xác:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Point ID</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Easting (X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Northing (Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Elevation (H)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cột nào là Code</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo Leica Captivate và Trimble Access, khi nhập dữ liệu cần kiểm tra chính xác thứ tự cột dữ liệu để tránh sai lệch tọa độ.<br /> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Những lỗi thường gặp khi nhập và xuất dữ liệu RTK</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mặc dù việc xuất và nhập dữ liệu trên các phần mềm như Leica Captivate, Trimble Access, CHCNAV LandStar, M-Survey (Meridian), SurPad (eSurvey) hay MateSurvey (Geomate) tương đối đơn giản, nhưng thực tế ngoài công trường vẫn thường xuyên phát sinh các lỗi làm mất thời gian xử lý dữ liệu hoặc thậm chí ảnh hưởng đến kết quả thi công.<br /> Dưới đây là những lỗi phổ biến nhất.</span></span><br /> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.1 Xuất file thành công nhưng mở ra không có dữ liệu</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi khá nhiều người dùng RTK từng gặp với các biểu hiện như:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File được tạo thành công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Có tên dự án hoặc tiêu đề file.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không có điểm tọa độ bên trong.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường gặp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Project hoặc Job.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai Data File.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đang bật bộ lọc dữ liệu (Filter).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chọn sai loại điểm cần xuất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point Database không chứa dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Kiểm tra lại Point Database.<br /> - Kiểm tra đúng Project đang làm việc.<br /> - Tắt các bộ lọc dữ liệu trước khi xuất.<br /> - Chọn xuất toàn bộ điểm (All Points).<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.2 File đuôi .CSV mở ra bằng excel nhưng hiển thị trống hoặc sai cột</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Biểu hiện thường thấy:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File vẫn có dung lượng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel mở được nhưng dữ liệu dồn vào một cột.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tưởng rằng file bị lỗi hoặc mất dữ liệu.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Excel đọc sai dấu phân cách dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">File sử dụng dấu "," trong khi máy tính đang cấu hình dấu ";" hoặc ngược lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai mã hóa ký tự (Encoding).</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Mở thử bằng Notepad hoặc Notepad++.<br /> - Sử dụng chức năng Import Data / From Text trong Excel.<br /> - Kiểm tra lại dấu phân cách dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.3 CSV của người khác có nhiều cột hơn hoặc ít cột hơn</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiều người cho rằng CSV là định dạng cố định. Thực tế không phải vậy. Một file CSV có thể chỉ chứa:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Point ID ( Số hiệu điểm)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Easting ( Tọa đọ X)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Northing ( Tọa độ Y)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Elevation ( Cao độ)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài các trường dữ liệu cơ bản như <strong>Số hiệu điểm, Tọa độ X, Tọa độ Y và Cao độ H</strong>, nhiều phần mềm RTK còn cho phép xuất thêm các thông tin như:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mã điểm (Code)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao sào (Rod Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiều cao ăng-ten (Antenna Height)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chỉ số PDOP</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trạng thái nghiệm (Fix Status)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc phương vị (Azimuth)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mô tả hoặc ghi chú điểm (Description)</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân là do cấu hình định dạng xuất dữ liệu của từng phần mềm hoặc từng đơn vị sử dụng. Đây không phải lỗi dữ liệu.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.4 Nhập dữ iệu thành công nhưng điểm nằm sai vị trí</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi nguy hiểm nhất vì rất khó phát hiện nếu không kiểm tra lại.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhầm thứ tự cột X và Y.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục VN-2000.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai múi chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai đơn vị tọa độ.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em><u><strong>Ví dụ:</strong></u><br /> Đúng: Point,X,Y,H<br /> P1,234567.123,1234567.456,10.123<br /> <br /> Sai: Point,Y,X,H<br /> P1,1234567.456,234567.123,10.123</em><br /> <br /> Kết quả là điểm có thể xuất hiện cách vị trí thực hàng chục hoặc hàng trăm kilomet.<br /> <br /> <strong>Cách xử lý:</strong><br /> - Kiểm tra lại cấu trúc file.<br /> - Kiểm tra đúng thứ tự Easting và Northing.<br /> - Kiểm tra hệ tọa độ công trình.<br /> - Đối chiếu với một điểm khống chế đã biết.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.5 Nhập dữ liệu thành công nhưng không nhìn thấy điểm</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lúc này máy báo nhập dữ liệu thành công, danh sách điểm vẫn có nhưng không nhìn thấy điểm trên bản đồ.<br /> <br /> Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nằm ngoài phạm vi hiển thị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai hệ tọa độ.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai Projection.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai kinh tuyến trục.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Cách xử lý:</strong><br /> - Zoom Extents.<br /> - Kiểm tra lại hệ tọa độ.<br /> - Kiểm tra lại Projection và KTT.<br /> </span></span><br /> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5.6 Nhập dữ liệu định dạng DXF nhưng không hiển thị đối tượng</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lỗi này xảy ra do những nguyên nhân như:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Layer đang tắt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">DXF không tương thích.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng nằm ngoài vùng hiển thị.</span></span></li> </ul> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cách xử lý:</span></span></strong><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra Layer.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thử lưu lại DXF phiên bản thấp hơn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Zoom Extents để kiểm tra toàn bộ bản vẽ.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> >>> CSV, TXT, DAT, DXF, KML hay SHP đều là những định dạng dữ liệu quan trọng trong công tác đo đạc hiện đại. Không có định dạng nào là "tốt nhất" cho mọi trường hợp. Lựa chọn đúng định dạng xuất dữ liệu sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thời gian xử lý văn phòng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hạn chế lỗi chuyển đổi dữ liệu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả phối hợp giữa khảo sát, thiết kế và thi công.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm rủi ro mất dữ liệu hoặc bàn giao sai định dạng.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế hiện nay, CSV vẫn là định dạng phổ biến nhất nhờ tính linh hoạt, dễ sử dụng và khả năng tương thích với hầu hết các phần mềm đo đạc, CAD và GIS.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/588632958_1241954074621445_1455996422080404648_n.jpg" style="width: 747px; height: 420px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '2026060609425746cdab6ee8d08331f2369b4b04a4a4d5.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Định dạng file RTK: CSV, DAT, DXF, KML, SHP và Cách Xuất, Nhập Dữ Liệu', 'meta_key' => '', 'meta_des' => 'Tìm hiểu các định dạng dữ liệu RTK phổ biến như CSV, DAT, DXF, KML, SHP. Hướng dẫn xuất nhập dữ liệu trên máy RTK Leica, Trimble, CHCNAV, Meridian, Geomate cùng các lỗi thường gặp và cách xử lý.', 'created' => '2026-06-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '877', 'slug' => 'dinh-dang-file-rtk-huong-dan-xuat-nhap-va-xu-ly-loi-thuong-gap-trong-do-dac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '545', 'rght' => '546', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '816', 'name' => 'Sửa chữa máy thủy bình bị rơi, va đập – Nguyên nhân gây đo sai ngoài công trường', 'code' => null, 'alias' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-–-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài công trường, máy thủy bình bị rơi, va đập hoặc rung lắc mạnh trong quá trình vận chuyển là tình trạng rất khó tránh khỏi. Tuy nhiên, điều nguy hiểm là nhiều trường hợp thiết bị vẫn hoạt động “có vẻ bình thường”, vẫn nhìn mia rõ, vẫn đọc số được… nhưng thực tế số liệu đo đã bắt đầu sai lệch.<br /> <br /> Nguyên nhân phổ biến thường không nằm ở ống kính hay bàn độ mà lại đến từ cụm cân bằng tự động (Automatic Compensator) bên trong máy. Đây được xem như “trái tim” của máy thủy bình tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850337449414_cbf23e5b4edf679eed8636152be1bb10.jpg" style="width: 600px; height: 800px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cụm cân bằng tự động hoạt động theo nguyên lý trọng lực với hệ thống con lắc treo bằng dây cực nhỏ kết hợp cơ cấu giảm dao động từ tính để giữ tia ngắm luôn nằm ngang. Nhờ đó máy có thể tự cân bằng nhanh và cho độ chính xác cao ngoài công trường. Tuy nhiên, cấu tạo này cũng khá nhạy với va đập. Chỉ một cú rơi hoặc vận chuyển mạnh cũng có thể gây các lỗi như:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Liệt rung cụm compensator.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhảy rung hoặc kẹt rung.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xoắn hoặc lệch dây treo con lắc.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số cao độ tăng bất thường.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế sửa chữa, phần lớn các trường hợp máy thủy bình đo sai sau va đập đều liên quan trực tiếp đến cụm cân bằng tự động.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850429563246_858468dda57655643001cdc5b7476042.jpg" style="width: 600px; height: 800px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Một số dấu hiệu nhận biết máy thủy bình bị sai sau va đập</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sau khi máy thủy bình bị rơi, va đập hoặc vận chuyển mạnh, nếu xuất hiện các dấu hiệu dưới đây thì nên kiểm tra ngay cụm cân bằng tự động bên trong máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo đi – đo về cho kết quả chênh lệch bất thường.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng một vị trí nhưng đo nhiều lần ra số khác nhau.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số rất lớn, thậm chí lệch đến hàng mét.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy vẫn đọc mia bình thường nhưng cao độ không ổn định.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi lắc nhẹ máy không còn nghe tiếng rung “roong roong” êm như lúc mới mua.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong nhiều trường hợp, cụm con lắc bên trong đã bị:<br /> <br /> • Liệt rung<br /> • Kẹt rung<br /> • Xoắn dây treo<br /> • Hoặc mất khả năng cân bằng tự động<br /> <br /> Điều nguy hiểm là bên ngoài máy vẫn có thể hoạt động “có vẻ bình thường”, khiến người dùng khó phát hiện nếu không kiểm tra sai số trước khi thi công. Vì vậy, sau mỗi lần máy bị va đập, nên kiểm tra sai số góc i hoặc test đo đi – đo về trước khi tiếp tục sử dụng ngoài công trường.<br /> <br /> Khuyến nghị sau khi thiết bị bị va đập:</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy và ốc cân bằng bằng cách quay máy 180° để quan sát độ dịch chuyển bọt thủy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai số góc i bằng phương pháp hai mia hoặc thử nghiệm đối chiếu.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không tiếp tục đo công trình khi chưa xác định chính xác tình trạng thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm.</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vì chỉ một máy bị lệch cũng có thể truyền sai số cho toàn bộ số liệu ngoài công trường.</span></span><br /> <br /> <p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (6).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: center; width: 800px; height: 420px;" /></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Qui trình sửa chữa máy thủy bình tại Trắc địa Thành Đạt</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bước 1: Tiếp nhận và kiểm tra tổng thể thiết bị.<br /> Bước 2: Kiểm tra cụm treo con lắc và cụm cân bằng tự động.<br /> Bước 3: Báo lỗi, báo giá sửa chữa và hiệu chỉnh.<br /> Bước 4: Cân chỉnh cụm compensator — công đoạn quan trọng nhất.<br /> Bước 5: Hiệu chỉnh sai số góc i.<br /> Bước 6: Kiểm tra thực địa sau sửa chữa.<br /> Bước 7: Dán tem kiểm nghiệm trước khi bàn giao cho khách hàng.<br /> <br /> Một máy thủy bình bị lệch không chỉ làm sai một điểm đo… mà có thể truyền sai số cho toàn bộ tuyến hoặc số liệu ngoài công trường.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Q&A - Kiểm tra máy thủy bình/ thủy chuẩn sau khi bị rơi, va đập</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy thủy bình bị rơi/ va đập có cần kiểm tra lại không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Đây là bước rất quan trọng trước khi tiếp tục thi công vì chỉ một sai lệch nhỏ trên máy thủy bình cũng có thể ảnh hưởng đến toàn bộ số liệu cao độ ngoài công trường. Nhiều trường hợp máy vẫn đọc mia bình thường nhưng thực tế tia ngắm đã bị sai lệch sau va đập.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi bị rơi máy thủy bình thường gặp những lỗi gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Một số lỗi phổ biến gồm:<br /> • Lệch bọt thủy.<br /> • Sai số góc i lớn.<br /> • Liệt rung hoặc nhảy rung cụm cân bằng tự động.<br /> • Nhìn mia hoặc mục tiêu không rõ.<br /> • Hư ốc cân bằng, vi động hoặc đế máy.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình bị lệch bọt thủy?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân thường do vận chuyển không đúng cách hoặc máy bị tác động mạnh khiến hệ thống cân bằng thay đổi vị trí, dẫn đến máy khó cân bằng hoặc cân bằng nhưng số đo không ổn định.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sai số góc i trên máy thủy bình là gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số góc i là tình trạng tia ngắm không còn nằm ngang chuẩn. Khi đó đo đi – đo về có thể cho kết quả khác nhau và sai số cao độ tăng bất thường. Đây là lỗi rất phổ biến sau khi máy thủy bình bị va đập.</span></span></p> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Sai số góc i.png" style="width: 665px; height: 295px;" /></h3> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>“Liệt rung” hoặc “nhảy rung” là gì?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là lỗi liên quan đến cụm cân bằng tự động (Automatic Compensator) bên trong máy thủy bình. Cụm con lắc bên trong có thể bị: đứt dây treo, xoắn dây, kẹt rung hoặc lệch cơ cấu giảm dao động từ tính. <br /> Khi đó máy không còn tự cân bằng chính xác dù vẫn có thể đọc mia bình thường.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z7850459087569_e24952711404d15f27d74612fb6b68f7.jpg" style="width: 460px; height: 219px;" /></span></span></p> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em>Dây rung máy thủy bình</em></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Vì sao máy thủy bình nhìn mia không rõ sau va chạm?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân có thể do:<br /> <br /> • Kính bị bẩn hoặc trầy xước.<br /> • Hệ thống lấy nét bị ảnh hưởng.<br /> • Cụm quang học bị lệch sau va đập.<br /> <br /> Nếu không kiểm tra sớm có thể ảnh hưởng trực tiếp đến độ chính xác đo đạc.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Máy bị hư ốc cân bằng hoặc đế máy có nghiêm trọng không?</em></span></span></h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">CÓ. Nếu máy bị rơi mạnh, các bộ phận cơ khí như: vi động, ốc cân bằng, đế máy… có thể bị cong, nứt hoặc biến dạng khiến việc cân bằng và đo đạc không còn chính xác như ban đầu.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- <em>Sau khi máy thủy bình bị rơi nên làm gì?</em></span></span></h3> <p class="isSelectedEnd"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra bọt thủy, kiểm tra sai số góc i và cụm con lắc tự động trước khi tiếp tục đo công trình. </span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Nếu nghi ngờ máy bị sai, nên mang đi kiểm tra – hiệu chuẩn sớm để tránh truyền sai số cho toàn bộ số liệu thi công. </span></p> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <strong style="margin: 0px; padding: 0px; font-weight: bold;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><a href="https://zalo.me/0913051734">Trắc Địa Thành Đạt</a> – Cung cấp máy thủy bình chính hãng!</span></span></strong></p> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Hotline: <strong style="margin: 0px; padding: 0px; font-weight: bold;">0913 051 734 / 0942 288 388</strong></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Địa chỉ: 145 Láng Hạ – Đống Đa – Hà Nội<br style="margin: 0px; padding: 0px;" /> Fanpage: Trắc Địa Thành Đạt</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '20260521180410f10bb16a2b4a9dbcb155bfe047377890.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Sửa Chữa Máy Thủy Bình Bị Rơi, Va Đập – Nguyên Nhân Gây Đo Sai & Cách Khắc Phục!', 'meta_key' => '', 'meta_des' => 'Máy thủy bình bị rơi, va đập dễ gây liệt rung, nhảy rung, sai số góc i và đo cao độ sai. Tìm hiểu nguyên nhân, dấu hiệu nhận biết và quy trình sửa chữa – hiệu chỉnh máy thủy bình tại Trắc Địa Thành Đạt.', 'created' => '2026-05-21', 'modified' => '2026-07-12', 'status' => '1', 'view' => '910', 'slug' => 'sua-chua-may-thuy-binh-bi-roi-va-dap-nguyen-nhan-gay-do-sai-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '543', 'rght' => '544', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '815', 'name' => 'Đo hầm bằng máy toàn đạc: So sánh Tunnel App Leica và giải pháp của các hãng khác', 'code' => null, 'alias' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi nói đến đo hầm bằng máy toàn đạc, thách thức lớn nhất không nằm ở thao tác đo… mà ở việc kiểm soát sai số và tiến độ thi công ngay tại hiện trường.</span></span>', 'content' => '<p> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trong các công trình hầm, metro hoặc hạ tầng ngầm, đo hầm bằng máy toàn đạc là phương pháp gần như bắt buộc do không thể sử dụng GNSS. </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tuy nhiên, thách thức lớn nhất không nằm ở việc đo được điểm, mà là kiểm soát sai số và phát hiện sai lệch kịp thời ngay tại hiện trường. Nếu sai số chỉ được phát hiện sau khi xử lý dữ liệu tại văn phòng, việc hiệu chỉnh sẽ trở nên tốn kém và ảnh hưởng trực tiếp đến tiến độ thi công. </span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chính vì vậy, các hãng thiết bị trắc địa đã phát triển nhiều giải pháp khác nhau nhằm hỗ trợ kỹ sư kiểm soát tốt hơn trong quá trình đo hầm.</span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Tunnel App trên máy toàn đạc Leica FlexLine</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.1 Tunnel App là gì?</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tunnel App là module phần mềm tích hợp trong hệ điều hành FlexField trên các dòng máy toàn đạc Leica FlexLine như TS03 và TS07.<br /> <br /> Ứng dụng này cho phép người dùng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nạp dữ liệu thiết kế tuyến và biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thực hiện stakeout trực tiếp ngoài hiện trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo profile và kiểm tra đào – đắp (cut & fill)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh sai lệch với thiết kế ngay trên máy</span></span></li> </ul> <h3> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">1.2 Ưu điểm của Tunnel App</span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So với phương pháp đo truyền thống, Tunnel App mang lại một số lợi ích rõ rệt:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm thao tác trung gian giữa hiện trường và văn phòng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hiển thị sai lệch trực quan theo biên dạng hầm</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ phát hiện sai số ngay trong quá trình đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng tốc độ thi công và kiểm tra</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm nổi bật của Leica là khả năng tích hợp toàn bộ workflow ngay trên thiết bị, phù hợp với các công trình cần triển khai nhanh ngoài hiện trường.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Quy trình đo hầm ngoài công trường</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị của Leica, Trimble, Topcon hay các hãng khác, quy trình đo hầm bằng máy toàn đạc ngoài công trường về bản chất vẫn tuân theo một nguyên tắc chung: t<strong>hiết lập đúng – bố trí đúng – kiểm tra liên tục.</strong><br /> <br /> Bước đầu tiên và quan trọng nhất là <strong>thiết lập trạm máy</strong>. Kỹ sư trắc địa cần đặt máy tại vị trí khống chế đã biết tọa độ và định hướng bằng phương pháp <strong>backsight hoặc resection</strong>. Độ chính xác của bước này có ảnh hưởng trực tiếp đến toàn bộ tuyến hầm, bởi chỉ cần sai lệch nhỏ ở định hướng ban đầu cũng có thể dẫn đến sai số tích lũy theo chiều dài công trình.<br /> <br /> Sau khi trạm máy được thiết lập chính xác, dữ liệu thiết kế sẽ được nạp vào hệ thống. Các thông tin bao gồm tim tuyến (alignment), lý trình và biên dạng hầm (cross-section) đóng vai trò làm cơ sở để thực hiện stakeout ngoài thực địa. Ở giai đoạn này, việc kiểm tra lại hệ tọa độ, đơn vị và hướng tuyến là cần thiết nhằm tránh các sai sót do nhập liệu hoặc chuyển đổi dữ liệu.<br /> <br /> Trong quá trình thi công, các điểm đặc trưng của biên dạng hầm sẽ được bố trí trực tiếp ngoài hiện trường thông qua máy toàn đạc. Người đo sẽ lần lượt xác định vị trí các điểm theo thiết kế và hướng dẫn thi công đào hầm theo đúng hình học yêu cầu. Tuy nhiên, việc “bố trí đúng” chưa phải là bước cuối cùng.<br /> <br /> Khâu kiểm tra mới là yếu tố quyết định chất lượng. Các điểm sau khi bố trí cần được đo lại và so sánh với thiết kế bằng các phép đo lặp hoặc thông qua các công cụ kiểm tra trên máy. Việc này giúp phát hiện sớm các sai lệch về vị trí, cao độ hoặc hình dạng biên dạng hầm, từ đó kịp thời điều chỉnh trước khi sai số bị tích lũy.</span></span><br /> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/LGS_streamline_tunnel_construction_and_maintenance_2480x750.jpg" style="width: 800px; height: 242px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong thực tế, nhiều sai số lớn trong thi công hầm không đến từ thiết bị, mà đến từ việc không kiểm tra hoặc kiểm tra quá muộn. Vì vậy, một quy trình đo hầm hiệu quả luôn phải đảm bảo nguyên tắc: đo đến đâu, kiểm tra đến đó.<br /> <br /> Sự khác biệt giữa các hãng thiết bị hiện nay chủ yếu nằm ở mức độ hỗ trợ người dùng trong từng bước của quy trình này. Tuy nhiên, dù sử dụng công nghệ nào, cốt lõi của đo hầm bằng máy toàn đạc vẫn không thay đổi: <strong>Thiết lập chuẩn – dữ liệu đúng – kiểm tra liên tục.</strong></span></span> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. So sánh các giải pháp đo hầm của các hãng</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Leica – All-in-one tại hiện trường</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica là hãng đi theo hướng tích hợp toàn bộ quy trình đo hầm vào một ứng dụng duy nhất. Tunnel App giúp người dùng thực hiện liên tục các bước từ nạp dữ liệu, bố trí đến kiểm tra ngay tại hiện trường mà không cần phụ thuộc nhiều vào xử lý hậu kỳ.<br /> Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình thi công nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đội thi công cần thao tác đơn giản, trực quan.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica App Tunnel 3.jpg" style="width: 800px; height: 428px;" /></span></span></p> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Trimble – Hệ sinh thái và xử lý thiết kế</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trimble sử dụng phần mềm Trimble Access kết hợp với module Tunnels chuyên dụng. Giải pháp này tập trung vào khả năng:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xử lý alignment phức tạp</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối với phần mềm thiết kế như TBC</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quản lý dữ liệu trong các dự án lớn</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dự án metro, hầm quy mô lớn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu đồng bộ BIM</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Trimple tunnel.jpg" style="width: 800px; height: 446px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Topcon – Linh hoạt theo workflow</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không giống Leica, <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu-topcon-gm-50-series.html">Topcon</a> không phát triển một module “Tunnel App” riêng biệt cho dòng máy toàn đạc. Thay vào đó, hãng lựa chọn hướng tiếp cận linh hoạt hơn thông qua phần mềm <strong>MAGNET Field</strong>. Trong thực tế, công tác đo hầm bằng máy toàn đạc Topcon được thực hiện bằng cách kết hợp nhiều chức năng sẵn có như alignment, stakeout, offset và kiểm tra profile.<br /> <br /> <strong>Workflow điển hình trên Topcon</strong><br /> <br /> Người dùng sẽ bắt đầu bằng việc nạp dữ liệu tuyến (alignment) và các thông số thiết kế vào phần mềm. Sau khi thiết lập trạm máy, quá trình stakeout được thực hiện thông qua các điểm tuyến và các khoảng lệch (offset) theo biên dạng hầm. <br /> Đối với kiểm tra hình học, kỹ sư thường đo lại các điểm trên biên dạng thực tế và so sánh với thiết kế thông qua các công cụ kiểm tra trong phần mềm hoặc xử lý hậu kỳ.<br /> <br /> <strong>Ưu điểm của cách tiếp cận này</strong><br /> <br /> Điểm mạnh lớn nhất của Topcon là tính linh hoạt. Người dùng có thể tùy biến quy trình đo theo từng loại công trình mà không bị giới hạn bởi một module cố định. Điều này đặc biệt hữu ích trong các dự án có yêu cầu đặc thù hoặc khi dữ liệu thiết kế không theo một chuẩn cố định.<br /> <br /> <strong>Hạn chế cần lưu ý</strong><br /> <br /> Tuy nhiên, việc không có một module tunnel chuyên dụng cũng đồng nghĩa với việc:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quy trình đo phụ thuộc nhiều vào kinh nghiệm người sử dụng,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc kiểm tra sai số không trực quan bằng các hệ thống tích hợp,</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần hiểu rõ workflow để tránh sai sót trong quá trình triển khai.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nói cách khác, Topcon không làm “ít hơn”, nhưng yêu cầu người dùng phải “hiểu nhiều hơn”.</span></span><br /> <br /> <h3 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel.jpg" style="text-align: center; font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 800px; height: 533px;" /></h3> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.4 Nikon / Sokkia – Phương pháp truyền thống</span></span></h3> <p style="text-align: center;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các dòng máy của Nikon và Sokkia chủ yếu sử dụng phương pháp truyền thống:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Stakeout cơ bản</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo và kiểm tra thủ công</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giải pháp này vẫn đáp ứng tốt các công trình quy mô nhỏ, nhưng hạn chế khi cần xử lý các dự án phức tạp.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Sự khác biệt cốt lõi trong đo hầm và yếu tố ảnh hưởng tới độ chính xác</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điểm khác biệt quan trọng nhất giữa các giải pháp không nằm ở khả năng đo, mà nằm ở thời điểm phát hiện sai số.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương pháp truyền thống: phát hiện sai sau khi đo</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm tích hợp (Tunnel App, Tunnels Module): phát hiện sai ngay trong quá trình đo</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc phát hiện sai số sớm giúp giảm chi phí hiệu chỉnh và hạn chế rủi ro trong thi công.<br /> </span></span> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Những yếu tố ảnh hưởng đến độ chính xác</strong></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dù sử dụng thiết bị hay phần mềm nào, độ chính xác trong đo hầm vẫn phụ thuộc vào:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định hướng trạm máy (backsight)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Điều kiện môi trường ảnh hưởng đến đo EDM</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số truyền tọa độ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kỹ năng và thao tác của người sử dụng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các phần mềm hiện đại chỉ đóng vai trò hỗ trợ, không thể thay thế hoàn toàn quy trình kiểm soát kỹ thuật ngoài công trường.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Topcon Tunnel 2.jpg" style="width: 800px; height: 415px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">>>> Đo hầm bằng máy toàn đạc đã có sự chuyển dịch rõ rệt từ phương pháp thủ công sang các giải pháp tích hợp và trực quan hơn. Tunnel App của Leica là một ví dụ điển hình cho xu hướng đưa việc kiểm soát sai số xuống ngay tại hiện trường. Trong khi đó, các hãng khác như Trimble, Topcon hay Nikon lựa chọn những hướng tiếp cận khác nhau, phù hợp với từng loại công trình và nhu cầu sử dụng.<br /> Tuy nhiên, yếu tố quan trọng nhất vẫn là: Hiểu đúng quy trình đo và chủ động kiểm soát sai số trong suốt quá trình thi công<br /> <br /> Nếu bạn cần tư vấn lựa chọn máy toàn đạc hoặc giải pháp đo hầm phù hợp với công trình, liên hệ ngay với chúng tôi!<br /> <br /> <span style="color:#ff6600;"><strong>Trắc Địa Thành Đạt – Luôn đồng hành cùng bạn!</strong></span><br /> </span></span>', 'images' => '202604231558382137741e17c2868ead929b32a270f9f6.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Đo hầm bằng máy toàn đạc: Leica Tunnel App và các hãng khác', 'meta_key' => '', 'meta_des' => 'Tìm hiểu cách đo hầm bằng máy toàn đạc Leica với Tunnel App và so sánh với Trimble, Topcon, Nikon. Quy trình, ưu nhược điểm và cách kiểm soát sai số ngoài công trường.', 'created' => '2026-04-23', 'modified' => '2026-07-12', 'status' => '1', 'view' => '1482', 'slug' => 'do-ham-bang-may-toan-dac-so-sanh-tunnel-app-leica-va-giai-phap-cua-cac-hang-khac', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '541', 'rght' => '542', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '814', 'name' => 'Máy toàn đạc điện tử: ĐO CHUẨN – BỐ TRÍ NHANH – ỔN ĐỊNH NGOÀI CÔNG TRƯỜNG!', 'code' => null, 'alias' => 'may-toan-dac-dien-tu-do-chuan-–-bo-tri-nhanh-–-on-dinh-ngoai-cong-truong', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> Tại <strong>Trắc Địa Thành Đạt</strong>, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc là thiết bị cốt lõi trong trắc địa công trình, giúp đo góc, đo khoảng cách và xác định tọa độ với độ chính xác cao. Tuy nhiên, trên thực tế, nhiều sai số trong thi công không đến từ thiết bị “kém”, mà đến từ việc chọn sai dòng máy hoặc sử dụng chưa đúng cách – đặc biệt là lỗi đo cạnh (EDM).<br /> <br /> Tại Trắc Địa Thành Đạt, chúng tôi cung cấp các dòng máy toàn đạc chính hãng, được tư vấn theo đúng nhu cầu công trình, giúp hạn chế sai số và tối ưu hiệu quả thi công.<br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Vì sao máy toàn đạc vẫn là thiết bị không thể thay thế?</span></span></h2> <br /> <p data-end="216" data-start="105"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong điều kiện thi công thực tế tại Việt Nam, nhiều khu vực thường gặp hạn chế về khả năng đo GNSS, chẳng hạn:</span></span></p> <ul data-end="407" data-start="218"> <li data-end="296" data-section-id="3ju1r3" data-start="218"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không gian bị che khuất bởi nhà cao tầng, công trình dày đặc hoặc tầng hầm</span></span></li> <li data-end="337" data-section-id="k3xm0j" data-start="297"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tín hiệu vệ tinh yếu hoặc nhiễu mạnh</span></span></li> <li data-end="407" data-section-id="utqol9" data-start="338"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Yêu cầu độ chính xác cao đến milimet trong quan trắc và hoàn công.</span></span></li> </ul> <p data-end="491" data-start="409"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trong những trường hợp này, máy toàn đạc vẫn là giải pháp hiệu quả và ổn định nhờ:</span></span></p> <ul data-end="665" data-start="493"> <li data-end="553" data-section-id="1rjirb8" data-start="493"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng đo khoảng cách chính xác cao bằng công nghệ EDM</span></span></li> <li data-end="594" data-section-id="1tziawf" data-start="554"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Không phụ thuộc vào tín hiệu vệ tinh</span></span></li> <li data-end="665" data-section-id="rakyqa" data-start="595"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm soát chặt chẽ công tác bố trí điểm và thi công ngoài thực địa.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Hai chức năng cốt lõi của máy toàn đạc</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.1 Đo điểm (Measurement)</span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đây là chức năng cơ bản và quan trọng nhất của máy toàn đạc trong công tác khảo sát. Máy thực hiện đo các yếu tố hình học gồm:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc ngang (Horizontal Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Góc đứng (Vertical Angle)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách (EDM – Electronic Distance Measurement)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Từ các giá trị này, hệ thống sẽ tính toán và xác định tọa độ không gian của điểm đo dưới dạng (X, Y, Z).<br /> <br /> Ngoài ra, máy toàn đạc hiện đại còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo không gương (Non-prism) trong điều kiện khó tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưu trữ và quản lý dữ liệu điểm đo trực tiếp trên máy</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Xuất dữ liệu phục vụ xử lý nội nghiệp (CAD, TBC, Civil 3D…)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khảo sát địa hình, đo vẽ bản đồ</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo hiện trạng công trình, kiểm tra kích thước</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lập lưới khống chế và thu thập dữ liệu phục vụ thiết kế</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Leica-Nova-TS60-BC-facing-right.jpg" style="width: 750px; height: 258px;" /></span></span><span style="display: none;"> </span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.2 Bố trí điểm (Stakeout)</span></span></h3> <p data-end="1067" data-start="941"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí điểm là quá trình chuyển thông tin từ bản vẽ thiết kế ra vị trí ngoài thực địa, đóng vai trò quan trọng trong thi công.</span></span></p> <p data-end="1114" data-start="1069"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựa trên tọa độ thiết kế, hệ thống thực hiện:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">So sánh tọa độ thiết kế với vị trí thực tế của gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán sai lệch theo các phương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn người đo di chuyển theo các chỉ dẫn:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trái / phải</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tiến / lùi</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lên / xuống</span></span></li> </ul> </li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhờ đó, điểm ngoài thực địa được đưa về đúng vị trí thiết kế với độ chính xác cao.<br /> <br /> Ngoài ra, các dòng máy hiện nay còn hỗ trợ:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí tuyến, cung tròn (Road / Arc stakeout)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí theo lưới, theo tim trục</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra sai lệch sau thi công (As-built check)</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ứng dụng thực tế:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định vị tim trục công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bố trí móng, cột, dầm, sàn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thi công hạ tầng, giao thông, công trình kỹ thuật</span></span></li> </ul> <h2 style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/image (11).png" style="font-family: tahoma, geneva, sans-serif; font-size: 14px; width: 660px; height: 371px;" /></h2> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Những lỗi đo cạnh thường gặp và cách xử lý</span></span></h2> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.1 Nguyên lý đo cạnh của máy toàn đạc</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy toàn đạc xác định khoảng cách bằng cách:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phát tín hiệu laser hoặc hồng ngoại đến gương (prism)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhận tín hiệu phản xạ quay về</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính toán khoảng cách dựa trên thời gian truyền (Time of Flight) hoặc độ lệch pha (Phase Measurement).</span></span></li> </ul> </li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các hãng như Leica, Topcon, Nikon hay Trimble đều sử dụng nguyên lý này, chỉ khác nhau về công nghệ xử lý tín hiệu và thuật toán nội bộ.</span></span> <h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2 Các nguyên nhân gây lỗi đo cạnh</span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.1 Suy giảm hệ đo EDM<br /> <br /> Đây là nguyên nhân phổ biến nhất trong thực tế. Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo lặp lại cho kết quả khác nhau</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách “nhảy số”, không ổn định</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Linh kiện EDM xuống cấp theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát yếu hoặc bộ thu tín hiệu kém</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Làm việc trong điều kiện ánh sáng mạnh hoặc phản xạ kém</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo tài liệu của Leica Geosystems, độ chính xác đo cạnh phụ thuộc lớn vào cường độ tín hiệu phản xạ và điều kiện môi trường.<br /> <br /> 3.2.2 Lệch trục EDM – trục ngắm (Collimation error)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo gần tương đối đúng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo xa sai lệch tăng dần</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bị va đập, rung lắc trong quá trình sử dụng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lâu không hiệu chuẩn</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai lệch cơ khí tích lũy</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số này ảnh hưởng rõ rệt khi đo khoảng cách lớn, đặc biệt trong các công trình yêu cầu độ chính xác cao.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Lỗi đo cạnh ( trục) 2.png" style="width: 680px; height: 295px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.2.3 Sai hằng số gương (Prism constant)<br /> <br /> Biểu hiện:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số gần như cố định trên mọi khoảng cách</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nguyên nhân:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng sai loại gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai giá trị hằng số gương (0, -30, +17.5 mm…)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo hướng dẫn của Trimble, việc thiết lập đúng prism constant là điều kiện bắt buộc để đảm bảo độ chính xác đo cạnh.<br /> <br /> 3.2.4 Ảnh hưởng môi trường đo<br /> <br /> Các yếu tố môi trường có thể ảnh hưởng đáng kể đến kết quả đo:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiệt độ và áp suất (P/T)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhiễu khí quyển</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bề mặt phản xạ kém (tường sơn tối, bề mặt ướt, kim loại)</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Theo khuyến nghị của FIG, sai số EDM tăng lên đáng kể trong điều kiện khí quyển không ổn định.<br /> <br /> 3.2.5 Sai số do thao tác người dùng<br /> <br /> Đây là nhóm lỗi rất phổ biến ngoài công trường.Bao gồm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dựng sào không thẳng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhập sai chiều cao gương</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thiết lập sai trạm máy hoặc điểm định hướng</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cấu hình hệ tọa độ không phù hợp</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sai số do người dùng thường khó nhận biết nếu không có quy trình kiểm tra chéo.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.3 Cách khắc phục</span></span></h3> <br /> <ul> <li data-end="2098" data-section-id="zvrhg8" data-start="2066"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kiểm tra EDM, 2C, MO định kỳ</span></span></li> <li data-end="2130" data-section-id="uu2tiv" data-start="2099"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sử dụng đúng prism constant</span></span></li> <li data-end="2172" data-section-id="nwvnt0" data-start="2131"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo kiểm tra cạnh chuẩn trước thi công</span></span></li> <li data-end="2209" data-section-id="ux2ibp" data-start="2173"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tránh đo trong điều kiện bất lợi</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Các dòng máy toàn đạc phổ biến</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Leica</strong><br /> <br /> Leica là thương hiệu cao cấp trong lĩnh vực trắc địa, nổi bật với độ chính xác và độ ổn định lâu dài. Hệ EDM mạnh, khả năng làm việc tốt trong nhiều điều kiện môi trường khác nhau, đặc biệt phù hợp với các công trình yêu cầu kỹ thuật cao.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác cao, ổn định theo thời gian</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ EDM mạnh, ít bị ảnh hưởng bởi môi trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phần mềm và thuật toán xử lý tốt</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình cao tầng, cầu đường, quan trắc, dự án yêu cầu kiểm soát sai số chặt chẽ.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/Leica toàn đạc.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Topcon</strong><br /> <br /> Topcon là dòng máy phổ biến nhờ sự cân bằng giữa hiệu năng và chi phí. Thiết bị dễ sử dụng, độ bền tốt, đáp ứng đa dạng nhu cầu thi công ngoài công trường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, thao tác nhanh</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ ổn định tốt trong điều kiện công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chi phí hợp lý</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, hạ tầng, thi công phổ thông.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/z6599539340575_12c3eac505cba39e86905990604ee094.jpg" style="width: 680px; height: 907px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Nikon</strong><br /> <br /> Nikon là lựa chọn phù hợp cho các đơn vị cần thiết bị đo đạc cơ bản với chi phí đầu tư thấp. Thiết kế đơn giản, dễ tiếp cận và đáp ứng tốt các công việc đo đạc thông thường.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giá tốt, dễ tiếp cận</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dễ sử dụng, phù hợp người mới</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền ổn định</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình dân dụng, khảo sát cơ bản.<br /> </span></span> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/DTM 352 Nikon 2.jpg" style="width: 680px; height: 509px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Sokkia</strong><br /> <br /> Sokkia có cùng hệ sinh thái với Topcon, nổi bật về độ bền và khả năng làm việc ổn định trong điều kiện công trường khắc nghiệt. Thiết bị được đánh giá cao về tính “lành”, ít lỗi vặt.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ bền cao, ổn định lâu dài</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hoạt động tốt trong môi trường khắc nghiệt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác đáp ứng tốt thi công</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Công trình hạ tầng, công trường làm việc cường độ cao.<br /> <br /> <strong>Trimble</strong><br /> <br /> Trimble tập trung mạnh vào giải pháp tích hợp và hệ sinh thái phần mềm. Các dòng máy toàn đạc của Trimble nổi bật ở khả năng kết nối, xử lý dữ liệu và làm việc đồng bộ với GNSS.<br /> <br /> Ưu điểm:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ sinh thái phần mềm mạnh (Access, TBC…)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tích hợp GNSS và quản lý dữ liệu tốt</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp quy trình làm việc hiện đại</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp: Dự án lớn, doanh nghiệp cần đồng bộ dữ liệu và quản lý thi công<br /> <br /> > Mỗi thương hiệu đều có định hướng và thế mạnh riêng. Việc lựa chọn nên dựa trên nhu cầu thực tế, điều kiện công trường và yêu cầu kỹ thuật của từng dự án để đạt hiệu quả tối ưu.</span></span><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> </span></span> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Cách chọn máy toàn đạc phù hợp công trình</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc lựa chọn máy toàn đạc cần dựa vào yêu cầu kỹ thuật và điều kiện thi công thực tế, thay vì chỉ nhìn vào thương hiệu hoặc giá thành.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình dân dụng, hạ tầng cơ bản</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phù hợp với các dòng Nikon hoặc Topcon nhờ dễ sử dụng, độ ổn định tốt và chi phí hợp lý. Đáp ứng hiệu quả cho các công việc đo đạc, bố trí thông thường.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công trình yêu cầu độ chính xác cao</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên ưu tiên Leica hoặc các dòng cao cấp, với độ chính xác và độ ổn định cao, phù hợp cho nhà cao tầng, kết cấu thép hoặc các hạng mục cần kiểm soát sai số chặt chẽ.<br /> </span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quan trắc, kiểm soát biến dạng</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cần lựa chọn máy có độ chính xác cao và hệ EDM ổn định, đảm bảo khả năng lặp lại kết quả trong nhiều chu kỳ đo.<br /> <br /> Nguyên tắc quan trọng: Lựa chọn đúng thiết bị theo nhu cầu thực tế sẽ giúp:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giảm sai số trong đo đạc</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tối ưu chi phí đầu tư</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nâng cao hiệu quả thi công</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo chất lượng công trình</span></span></li> </ul> <h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Tại sao nên mua máy toàn đạc tại Trắc địa Thành Đạt?</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi cung cấp đa dạng các loại máy toàn đạc của các hãng <a href="https://www.tracdiathanhdat.vn/may-toan-dac-dien-tu">Leica</a>, Nikon, Topcon, đáp ứng nhiều nhu cầu khác nhau trong thi công và khảo sát.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tư vấn đúng nhu cầu công trình</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hỗ trợ kỹ thuật ngoài công trường</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hướng dẫn sử dụng, kiểm tra sai số</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cung cấp thiết bị chính hãng.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> Bạn đang phân vân giữa các dòng máy toàn đạc? Hoặc gặp lỗi đo cạnh ngoài công trường?<br /> <br /> >>> Liên hệ ngay <a href="https://zalo.me/0913051734"><strong>Trắc Địa Thành Đạt</strong></a> để được tư vấn phù hợp nhất! </span></span>', 'images' => '20260505102744e930c0e340a0ba993987b0238086413c.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử: Báo giá, tư vấn chọn máy chuẩn công trình!', 'meta_key' => '', 'meta_des' => 'Tìm hiểu máy toàn đạc điện tử, cách chọn máy phù hợp công trình. Tư vấn thiết bị chính hãng tại Trắc Địa Thành Đạt!', 'created' => '2026-04-20', 'modified' => '2026-07-11', 'status' => '1', 'view' => '6424', 'slug' => 'may-toan-dac-dien-tu-do-chuan-bo-tri-nhanh-on-dinh-ngoai-cong-truong', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '539', 'rght' => '540', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $tinlq = array( (int) 0 => array( 'Post' => array( 'id' => '644', 'name' => 'GNSS RTK', 'code' => null, 'alias' => 'gnss-rtk', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; border: 0px; background-image: initial; background-position: 0px 0px; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; outline: 0px; vertical-align: top; color: rgb(0, 0, 0); font-size: 14px; text-align: justify; font-weight: 700 !important;">GNSS RTK</span><span style="color: rgb(0, 0, 0); font-size: 14px; text-align: justify;"> được biết đến là thiết bị dùng trong công tác trắc địa giúp hỗ trợ quá trình khảo sát địa hình. Với khả năng tự động vẽ và lưu lại các khu vực khảo sát giúp nhanh chóng hoàn thiện các bản vẽ đầy đủ, chính xác với các thông số kỹ thuật cần thiết. Đây là thiết bị hỗ trợ đắc lực cho những người làm công tác trắc địa để có thể hoàn thành công việc nhanh chóng, tiết kiệm thời gian và chi phí với độ chính xác cao.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường hiện nay có rất nhiều dòng máy GNSS RTK với sự đa dạng về kiểu dáng thiết kế, các tính năng cũng như kích thước cho khách hàng lựa chọn. Với mỗi sản phẩm sẽ có những đặc tính cũng như công năng riêng phù hợp với nhu cầu sử dụng của từng đối tượng khách hàng cũng như tính chất công việc. Cùng tìm hiểu ưu và nhược điểm của máy GNSS RTK để có cái nhìn tổng quan về nó trước khi bạn lựa chọn đầu tư cho dự án của mình.</span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <strong>Ưu điểm nổi bật của máy GNSS RTK </strong><br /> <br /> Đảm bảo độ chính xác cao nhất trong quá trình làm việc. Đối với công tác trắc địa thì độ chính xác là thông số quan trọng nhất cần hướng tới trong quá trình làm việc do đó các thiết bị hỗ trợ cũng cần tối ưu hóa được yếu tố này. Với việc áp dụng công nghệ RTK cũng như CORS Network các mẫu máy này đảm bảo mang đến các thông số chuẩn nhất để cung cấp dữ liệu cho quá trình vẽ cũng như hình thành các dữ liệu chung.<br /> <br /> Trong việc sử dụng công nghệ GNSS thì CORS là trạm tham chiếu hoạt động liên tục để tạo sự liên kết các thiết bị với đường truyền tín hiệu. Công nghệ này giúp khoảng cách tối đa giữa trạm gốc và máy định vị GNSS được thiết lập khoảng 10 - 15km, giúp tăng khoảng cách cho hoạt động của máy. Điều này giúp giảm nhân công cũng như chi phí trong quá trình làm việc.<br /> <br /> Với thiết kế nhỏ gọn, dễ dàng di chuyển giúp mang đến sự tiện lợi tối đa trong quá trình sử dụng. <br /> <br /> Một ưu điểm phải kế đến của loại máy GNSS RTK đó là việc tích hợp nhiều tính năng thông minh trong cùng thiết bị. Các tính năng điều khiển bằng giọng nói, bảng điều khiển điện tử, việc thay đổi kích thước máy được tích hợp …giúp dễ dàng sử dụng cũng như có thể thực hiện được nhiều chức năng khác nhau cùng lúc.<br /> <br /> Bộ nhớ trong lớn giúp tăng khả năng lưu trữ thông tin cùng với đó là khả năng kết nối với máy tính, điện thoại, bluetooth hay 3G, 4G giúp nâng cao tối đa được các công năng cũng như sự tiện lợi trong quá trình sử dụng.<br /> <br /> Khả năng kết nối với các thiết bị khác tối ưu cùng với hệ thống CORS.<br /> <br /> Với chất liệu cao cấp có khả năng chống va đập cũng như hạn chế tối đa các tác động của các yếu tố bên ngoài giúp mang đến sản phẩm bền đẹp lâu dài theo thời gian sử dụng.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/phân phối máy định vị vệ tinh 2 tần số rtk (1).png" style="width: 850px; height: 604px;" /><br /> <br /> <strong>Nhược điểm của máy GNSS RTK</strong><br /> <br /> Hiện nay, máy GPS –GNSS RTK chất lượng dù đã được tích hợp đầy đủ các tính năng nhưng để có được độ chính xác tuyệt đối cùng với vi</span>ệc</span> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">thực hiện thêm nhiều công việc khác các bạn cần phải có sự kết nối thêm các thiết bị khác để sử dụng.<br /> <br /> Giới hạn làm việc của máy trong một phạm vi nhất định cũng là một khó khăn trong quá trình sử dụng. Do đó, cần tìm hiểu đầy đủ các thông số của máy trước khi lựa chọn để phù hợp với đặc điểm công việc.<br /> <br /> Giá thành cao cũng là một nhược điểm cần tính đến khi quyết định đầu tư. <br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Máy RTK.png" style="width: 850px; height: 680px;" /><br /> <br /> </span></span>', 'images' => '2021081816133230412c34d3b16d2ec66a3d1eba4d0d89.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Máy RTK, máy định vị vệ tinh RTK, máy GPS RTK, máy định vị vệ tinh GNSS RTK, máy RTK giá rẻ, máy RTK tốt nhất', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-18', 'modified' => '2026-07-12', 'status' => '1', 'view' => '20547', 'slug' => 'gnss-rtk', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '231', 'rght' => '232', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '641', 'name' => 'Phần mềm LandStar 7 và cách cài đặt trên máy tính', 'code' => null, 'alias' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">LandStar 7 là một ứng dụng miễn phí được phát triển bởi www.chcnav.com, thuộc danh mục Bản đồ và dẫn đường. </span></span>', 'content' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="294" src="https://www.youtube.com/embed/04hr6Gy-3RE" title="YouTube video player" width="680"></iframe><br /> <br /> LandStar7 là giải pháp phần mềm khảo sát đã được kiểm chứng thực địa mới nhất dành cho mọi thiết bị Android và bộ điều khiển dữ liệu CHCNAV. Được thiết kế cho các nhiệm vụ khảo sát và lập bản đồ có độ chính xác cao, LandStar7 cung cấp khả năng quản lý quy trình làm việc liền mạch, giao diện người dùng đồ họa dễ học và dễ sử dụng để hoàn thành tất cả các dự án của bạn một cách hiệu quả. Các định dạng nhập và xuất dữ liệu toàn diện, nhiều phương pháp đo lường đảm bảo năng suất tức thì.<br /> <br /> - Hỗ trợ nhiều loại định dạng nhập và xuất khác nhau LandStar7 nhập và xuất DXF, DWG, SHP, KML, KMZ, CSV, DAT, TXT cũng như nội dung dữ liệu được tùy chỉnh đầy đủ từ dự án khảo sát lựa chọn các định dạng CSV, DAT và TXT.<br /> <br /> - Xác định vị trí và trực quan hóa dữ liệu dự án của bạn trong nháy mắt LandStar7 tích hợp bản đồ trực tuyến của Google, OSM, BING và WMS để cung cấp thông tin vị trí có ý nghĩa cho các nhà khảo sát và chuyên gia xây dựng. Các dự án được hiển thị trong địa hình khu vực hoặc hình ảnh vệ tinh trong thời gian thực.<br /> <br /> - Rất linh hoạt và sẵn sàng cho nhiều ứng dụng LandStar7 được thiết kế để cung cấp cho bạn các bộ tính năng đặc biệt, từ khảo sát đất đai, các dự án xây dựng và kỹ thuật, lập bản đồ, thu thập dữ liệu GIS, liên quan đến đường đến khảo sát đường ống.<br /> <br /> Giao diện người dùng có thể tùy chỉnh của nó giúp LandStar7 dễ sử dụng bằng cách tập trung vào các chức năng thiết yếu thường được sử dụng. Quy trình phát triển phần mềm linh hoạt Nhóm phát triển LandStar7 của chúng tôi giữ liên lạc thường xuyên với các nhà khảo sát, các chuyên gia xây dựng và mạng lưới đối tác trên toàn thế giới của chúng tôi để mang lại các chức năng vượt trội mới. Khi sử dụng LandStar7 ngay hôm nay, bạn được đảm bảo tận hưởng các tính năng mới thường xuyên mà không phải trả thêm phí.<br /> <br /> <strong>>>></strong> Trong bài viết bên dưới đây chúng tôi sẽ giới thiệu tới bạn cách cài đặt LandStar 7 trên máy tính (PC Windows & Mac). Phương pháp mà chúng tôi áp dụng là sử dụng Bluestacks, công cụ giả lập hệ điều hành Android hàng đầu hiện nay. Tất cả những gì bạn cần chỉ là một chiếc máy tính chạy Windows hoặc Mac.<br /> <br /> <strong>Bước 1:</strong> Tải xuống và cài đặt Bluestacks<br /> Tải phiên bản mới nhất tại đây <a href="https://www.bluestacks.com/vi/index.html" target="_blank">https://www.bluestacks.com/vi/index.html</a>. Trang web này hỗ trợ tiếng Việt nên bạn có thể dễ dàng tải về file cài đặt của Bluestacks. Quá trình tải về có thể mất vài phút.<br /> Sau khi tải về, nhấp chuột vào file bạn mới tải xuống để bắt đầu quá trình cài đặt. Giao diện cài đặt rất đơn giản, quá trình cặt đặt sẽ diễn ra nhanh chóng. Nếu có bất cứ vấn đề gì bạn có thể vào mục hỏi đáp của Bluestacks để tham khảo cách xử lý.<br /> <br /> <strong>Bước 2:</strong> Tải xuống file cài đặt của LandStar 7 cho máy tính PC Windows<br /> File cài đặt này có đuôi là .APK. APK là viết tắt của cụm từ tiếng Anh "Android application package" (tạm dịch là bộ cài đặt ứng dụng cho hệ điều hành Android). Bạn có thể tải về file apk này từ trang web của chúng tôi <a href="https://drive.google.com/file/d/1vSHDZvVz9EjJtpVAeKgVzJaua3D-Wwf1/view?usp=sharing">TẠI ĐÂY</a>.<br /> <br /> <strong>Bước 3:</strong> Tiến hành cài đặt LandStar 7 bằng Bluestacks<br /> Tập tin APK của LandStar 7 sau khi tải về có thể được cài đặt vào Bluestacks theo một trong các cách sau:</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nhấp đúp vào file APK, cách này đơn giản và nhanh nhất.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chuột phải vào file APK, chọn "Open With", sau đó chọn Bluestacks.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kéo thả file APK vào màn hình ứng dụng Bluestacks</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Quá trình cài đặt LandStar 7 sẽ diễn ra nhanh chóng. Ngay sau khi quá trình cài đặt kết thúc, bạn sẽ thấy biểu tượng icon của LandStar 7 trên màn hình trang chủ của Bluestacks. Nhấp chuột vào biểu tượng icon này để bắt đầu sử dụng LandStar 7 trên máy tính PC Windows.</span></span><br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span></p> ', 'images' => '2021080616092739e989a091af097f2762083a8ccfb10e.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-06', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23109', 'slug' => 'phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '225', 'rght' => '226', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '640', 'name' => 'iRTK4 Hi-Target - A Simple but not Simplistic GNSS System', 'code' => null, 'alias' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">iRTK4 Hi-Target là hệ thống thu GNSS thông minh đầy đủ tính năng được trang bị anten mới tích hợp đa kênh tiên tiến cho phép người dùng giải được các bài toán đo đạc một cách chính xác, đáng tin cậy. Tính năng Tilt-Surveying không cần hiệu chuẩn mà vẫn có thể thu thập dữ liệu ở nhiều nơi.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. RTK tiên tiến thế hệ mới<br /> <br /> Quản lý tín hiệu vệ tinh linh hoạt giúp bạn có được giải pháp chính xác hơn. Hiệu suất được cải thiện 20% trong môi trường GNSS đầy thử thách.<br /> <br /> 2.IMU (Biểu tượng)<br /> <br /> Bắt đầu ngay lập tức với công nghệ bù nghiêng không cần hiệu chuẩn, hỗ trợ bạn khảo sát nhanh chóng và chính xác hoặc xác định các điểm mà không cần cân bằng cột, Sai số dưới 3cm trong phạm vi nghiêng 45 °, tăng hiệu suất làm việc lên 20%.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/iRTK4(1).jpg" style="width: 383px; height: 131px;" /><br /> <br /> 3. Sạc nhanh<br /> <br /> Sạc pin của bạn lên đến 50 phần trăm chỉ trong 50 phút với bộ chuyển đổi 45W, nhờ khả năng sạc nhanh, bạn có thể sạc lại trong thời gian ngắn hơn.<br /> <br /> 4. Giao diện người dùng web (WEB UI)<br /> <br /> Cách nhanh chóng và hiệu quả để giám sát và điều khiển các thiết bị phần cứng. Ngoài ra, cung cấp quyền truy cập vào các tính năng được sử dụng phổ biến nhất thông qua trình duyệt web hiện có trên thiết bị bạn chọn — không cần tải xuống hoặc cài đặt bất kỳ thứ gì!<br /> <br /> 5. Smart Base<br /> <br /> Tối ưu hóa tuyệt vời cài đặt chế độ làm việc, Tự động ghép nối Base và Rover của bạn bằng dịch vụ toàn cầu Hi-target, mở rộng phạm vi công việc và tiết kiệm thời gian của bạn.<br /> <br /> Radio ngoài thế hệ mới<br /> <br /> HDL-460A cung cấp thông tin liên lạc dữ liệu đáng tin cậy cho các ứng dụng quan trọng trong đó yêu cầu sự kết hợp của sự ổn định, hiệu suất cao và phạm vi xa.<br /> <br /> <img src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="height: 100px; width: 250px;" /><br /> </span></span>', 'images' => '20210805113424adf751172d9f3d7ddcf7e526d09e3fb6.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy RTK', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-08-05', 'modified' => '2026-07-12', 'status' => '1', 'view' => '23795', 'slug' => 'irtk4-hi-target-a-simple-but-not-simplistic-gnss-system', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '223', 'rght' => '224', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '639', 'name' => 'Thông số kỹ thuật của một số dòng máy toàn đạc điện tử Leica (cũ): TCR-403, TCR-405, TCR-407, TCR-705, TCR-802, TCR-805', 'code' => null, 'alias' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><font color="#323232">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ: </font><span style="line-height: 107%; letter-spacing: 0.1pt;">Leica TCR-802 Power, Leica TCR-805, Leica TC-705.</span></span></span> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> </h1> <h1 style="margin: 0in 0in 7.5pt; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="font-size: 17pt; line-height: 107%; font-family: Helvetica, sans-serif; letter-spacing: 0.1pt;"><o:p></o:p></span></h1> ', 'content' => '<p> <font color="#323232" style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Tham khảo thông số kỹ thuật của một số dòng máy toàn đạc Leica cũ:<br /> <br /> - </font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; line-height: 14.98px; letter-spacing: 0.1pt;">Leica TCR-802 Power<br /> - Leica TCR-805<br /> - Leica TC-705</span><br /> - <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica TCR 403, 405,407 Power</span></span><br /> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">I. Máy toàn đạc điện tử Leica TCR-802 Power</span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> 1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 2”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/154253643_1379364745733010_5284105879190099443_o (1)(1).jpg" style="width: 480px; height: 360px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">II. Máy toàn đạc điện tử Leica TCR-805</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Ống kính<br /> - Có độ phóng đại là: 30 x<br /> - Sở hữu trường nhìn là : 1° 30’(1.66 gon) 26m ở khoảng cách 1000m (1km)<br /> - Phạm vi điều tiêu là: 1.7m cho tới vô cực<br /> - Thể lưới: chiếu sáng, có 5 cấp độ chiếu sáng<br /> 2. Bộ nhớ và truyền dữ liệu<br /> - Bộ nhớ trong của máy là: 24.000 điểm ghi<br /> - Định dạng các dữ liệu: DXF /XML /ASCII /XLS /GSI /Định dạng tự do<br /> 3. Bàn phím và màn hình<br /> - Màn hình: 01 màn hình LCD 160x280 pixel rất nét, có đèn chiếu sáng 5 cấp<br /> - Trang bị bàn phím tiêu chuẩn Alpha<br /> 4. Đo góc ( Hz, V)<br /> - Có độ chính xác (ISO 171233) là: 5”<br /> - Khả năng hiển thị: 1” / 0.1 mgon / 0.01 mil<br /> - Phương pháp: liên tục, đối tâm, tuyệt đối<br /> - Bộ bù: tăng lên 4 lần sự bù trục<br /> - Độ chính xác cài đặt độ bù là: 2”<br /> 5. Đo khoảng cách cho đến điểm phản xạ<br /> - Với gương GPR1: 3500m<br /> - Với tấm phản xạ (60 mm x 60 mm): 250m<br /> - Độ chính xác / Thời gian đo:<br /> + Đối với đo chính xác (Fine) : ±(1.5 mm+2 ppmD)/ 2.4 giây<br /> + Đối với đo nhanh: ±(3mm+2ppmD)/0.8 giây<br /> + Đối với đo đuổi: ±(3mm+2ppmD)<0.15 giây<br /> 6. Được trang bị hệ điều hành : Windows CE: 5.0 Core<br /> 7. Dọi tâm tia laser<br /> - Loại: điểm laser, chiếu sáng, gồm 5 cấp độ chiếu sáng<br /> - Độ chính xác dọi tâm: 1.5 mm trên 1.5 m so với chiều cao máy<br /> 8. Nguồn pin (GEB221)<br /> - Thể loại: LithiumIon<br /> - Thời gian máy hoạt động: hơn 20 giờ<br /> - Máy có trọng lượngg: 5.1 kg<br /> 9. Môi trường hoạt động:<br /> - Làm việc tốt: từ -20°C cho đến +50°C<br /> - Tiêu chuẩn về khả năng chịu bụi & nước: IP55<br /> - Độ ẩm là: 95% không ngưng tụ</span></span><br /> <h1 style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/abaec5a286b071ee28a19.jpg" style="width: 480px; height: 640px;" /></span></span></h1> <h1> </h1> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">III. Máy toàn đạc điện tử Leica TC-705</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Đo góc<br /> - Có độ chính xác là: ±5”<br /> - Cách đo: liên tục, đối tâm và tuyệt đối.<br /> 2. Hệ thống bù trục<br /> - 4 trục bù nghiêng<br /> - Dải bù nghiêng là : 4’<br /> - Có độ chính xác bù trục là: ±0.5”<br /> 3. Đo cạnh có gương<br /> - Khi đo bằng gương GPR1 là: 1.000m<br /> - Khi đo bằng gương GRZ4 là: 600m<br /> - Khi đo bằng gương mini GMP 101 là: 400m<br /> - Đối với gương giấy 60 x 60mm là: 250m<br /> - Có độ chính xác là: ±1mm + 1.5 ppm / 2.4 giây<br /> - Khi đo nhanh là: ±3 mm+1.5 ppm / 0.8s<br /> - Hiển thị là: 0.1 mm<br /> - Cách thức: Đổi pha với tia laze đỏ đồng trục, rõ rệt.<br /> 4. Đo cạnh không gương<br /> - PinPoint R200 là : 200m<br /> - Có độ chính xác là: ±2mm + 2 ppm / 3 giây<br /> 5. Ống kính<br /> - Có độ phóng đại ống kính là: 30 X<br /> - Độ mở ống kính là : 40mm<br /> - Dải điều quang: từ 1.7 m cho tới vô cùng<br /> 6. Dọi tâm<br /> - Kiểu dọi tâm: bằng tia laze<br /> - Có độ chính xác là: ±1mm tại 1.5 chiều cao máy<br /> 7. Màn hình, bàn phím<br /> - Được trang bị 01 Màn hình LCD rõ nét<br /> - Bàn phím gồm có chữ và số. Có chiếu sáng cho màn hình<br /> 8. Quản lý dữ liệu<br /> - Có bộ nhớ trong là: 10.000 điểm nhập cùng với điểm đo được<br /> - Truyền dữ liệu: GSI-Format via RS232<br /> - Trao đổi dữ liệu: GS116 / IDEX / GS18 / dxf<br /> 9. Pin của máy<br /> - Sử dụng Pin Lithium-Ion GEB 121,<br /> - Thời gian vận hành: từ 5 đến 8 tiếng<br /> 10. Trọng lượng<br /> - Đầu máy nặng: 5,6 kg<br /> 11. Khả năng chống nước và chống bụi<br /> - Đã đạt được tiêu chuẩn IP54<br /> - Có khả năng chịu độ ẩm lên đến 95%</span></span><br /> <br /> <h2> <span style="font-size: 14px;"><span style="font-family: tahoma, geneva, sans-serif;">IV. Máy toàn đạc điện tử Leica TCR-403; TCR-405; TCR-407</span></span></h2> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Dòng sản phẩm LEICA Total Station TPS400 Power (TCR403/405/407 Power) nổi bật với chế độ đo không gương (bằng tia laser) và laser chỉ hướng.</span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Thừa hưởng đầy đủ các tính năng của TPS400, TPS400 Power còn được tích hợp thêm khả năng đo xa bằng tia laser không cần gương, chỉ cần ngắm vào vật có độ phản xạ đủ cao (90%). Điều này đã giúp cho TPS400 Power năng động và tiện lợi hơn.</span><br /> <br /> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">1. Ống kính:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ phóng đại: 30 x<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trường nhìn : 1° 30’(1.66 gon) 26m tại khoảng cách 1km<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phạm vi điều tiêu: 1.7 m đến vô cùng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thể lưới: chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 2. Bộ nhớ, truyền dữ liệu:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ nhớ trong: 24.000 điểm ghi<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Định dạng dữ liệu: GSI / DXF / XML / ASCII/XLS/ Định dạng tự do<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 3. Bàn phím và màn hình<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Màn hình: 01 màn hình tinh thể lỏng LCD <a href="http://tracdiathanhdat.vn/gioi-thieu-cong-ty-cp-cn-va-tm-thanh-dat.htm" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;">160×280</a> pixel, đèn chiếu sang 5 cấp<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bàn phím tiêu chuẩn Alpha<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 4. Đo góc ( Hz, V)<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác (ISO 171233): 5”<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Hiển thị: 1” / 0.1 mgon / 0.01 mil<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Phương pháp: tuyệt đối, liên tục, đối tâm<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Bộ bù: tăng lên bốn lần sự bù trục<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác thiết đặt độ bù: 2”</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">5. Đo khoảng cách tới điểm phản xạ:</span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Đo không gương (đo Laser RL): 170 m </span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">– Gương GPR1: 3500m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Tấm phản xạ (60mmx60mm): 250m<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác/ Thời gian đo:<br style="margin: 0px; padding: 0px;" /> + Đo chính xác (Fine) : ±(5 mm+2 ppmD)/ 2.4 giây,<br style="margin: 0px; padding: 0px;" /> + Đo nhanh: ±(5mm+2ppmD)/0.8 giây,<br style="margin: 0px; padding: 0px;" /> + Đo đuổi: ±(5mm+2ppmD)/< 0.15 s<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 6. Hệ điều hành: Windows CE: 5.0 Core<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 7. Dọi tâm laser:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại : Điểm laser,chiếu sáng, 5 cấp độ chiếu sáng<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ chính xác dọi tâm:1.5mm trên 1.5m chiều cao máy<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 8. Nguồn pin (GEB221):<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Loại: LithiumIon<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Thời gian làm việc: hơn 20 h<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Trọng lượng: 5.1 kg<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> 9. Môi trường hoạt động:<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Biên độ làm việc: từ -20°C tới +50°C<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Chịu nước và bụi (IEC 60529): IP55<br style="margin: 0px; padding: 0px; box-sizing: border-box; font-family: Arial !important;" /> – Độ ẩm: 95% không ngưng tụ</span></span><br /> </p> <table border="1" cellpadding="0" cellspacing="0" style="width:619px;" width="619"> <tbody> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu kỹ thuật </strong></span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>403</strong></span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>405</strong></span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>407</strong></span></span></td> </tr> <tr> <td colspan="3" style="width:499px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Độ góc (Hz, V)</strong></span></span></td> <td style="width:120px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phương thức</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo liện tục tuyệt đối</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Gốc hiển thị (bước nhảy)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″ / 0.1 mgon / 0.01 mil</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -3)</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3″ (1 mgon)</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5″ (1.5 mgon)</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">7″ (2 mgon)</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Ống kính</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ số phóng đại</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">30x</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trưng nhìn</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1° 30′ (26 m at 1 km)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khỏang cách nhìn gần I</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.7m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lưới chữ thập</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chiếu sáng</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Bù nghiêng</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hệ thống bù nghiêng</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cân bằng 2 trục</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Setting accuracy</span></span></td> <td style="width:102px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1″</span></span></td> <td style="width:132px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1.5″</span></span></td> <td style="width:120px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2″</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Đo khoảng cách bằng tia hồng ngoại</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring range with circular prism GPR1</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3.500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Measuring with reflective foil<br /> (60 mm x 60 mm)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">250m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Standard deviation<br /> (ISO 17123 -4)<br /> (fine/quick/tracking)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2mm + 2 ppm/5 mm + 2 ppm/5 mm + 2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">< 1 sec/< 0.5 sec/< 0.15 sec</span></span></td> </tr> <tr> <td colspan="4" style="width:619px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chính xác, nhanh, do liên tục.</strong></span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đo khoảng cách không gương</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R100 (“power”) 170m (90 % reflective)</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(Medium atmospheric conditions)</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">PinPoint R300 (“ultra”) > 500 m (90 % reflective)<br /> Laser at GPR circular reflector 7’500 m</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3mm+2 ppm/5 mm+2 ppm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thời gian đo</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">typ. 3 s/1 s</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kíck cỡ điểm với 100 m</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">12mm x 40 mm</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Số liệu</strong></span></span></td> <td colspan="3" style="width:354px;"> </td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ trong</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 Điểm đo</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giao tiếp</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">RS232</span></span></td> </tr> <tr> <td style="width:265px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Định dạng dữ liệu</span></span></td> <td colspan="3" style="width:354px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">GSI/ASCII/dxf/Freely definable formats</span></span></td> </tr> </tbody> </table> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"> </span></span></span></span></p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify; box-sizing: border-box; line-height: 1.5; font-size: 16px; font-family: "time new roman" !important;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp(1).jpg" style="width: 250px; height: 100px;" /></span></span></p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span>', 'images' => '202107301638040599a20d3fb57fe46b312b506c17e5cc.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy toàn đạc điện tử ', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-30', 'modified' => '2026-07-12', 'status' => '1', 'view' => '19533', 'slug' => 'thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '221', 'rght' => '222', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '638', 'name' => 'Những lỗi thường gặp ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m', 'code' => null, 'alias' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span>', 'content' => '<br /> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);">Máy thủy bình điện tử Sprinter là thiết bị đo cảm biến độ cao của hãng Leica, được sử dụng cho các công tác đo chênh cao, truyền dẫn cao độ, tính toán cao độ - khối lượng san lắp với độ chính xác cao do hạn ch</span><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px;">ế</span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(0, 0, 0);"> được các sai số khách quan.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tham khảo một số lỗi và ý nghĩa của những lỗi này ở máy thuỷ bình điện tử Leica Sprinter 50m/100m/150m</span></span><br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/1565334829-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-dathop-02.jpg" style="width: 620px; height: 477px;" /><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khi gặp các lỗi trên hãy liên hệ với chúng tôi qua số hotline để được khắc phục nhé!<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/hotline(1).png" style="width: 250px; height: 100px;" /></span></span><br /> ', 'images' => '2021072917090604e0ee7f57cb99fce8677b2f946c35af.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình điện tử', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-29', 'modified' => '2026-07-12', 'status' => '1', 'view' => '14983', 'slug' => 'nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '219', 'rght' => '220', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '637', 'name' => 'So sánh giữa Garmin GPSMAP 66S vs GPSMAP 64S', 'code' => null, 'alias' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tham khảo sự khác nhau giữa hai dòng máy định vị GPSMAP 66s và 64s của hãng Garmin và những ưu điểm vượt trội mà Garmin đã mang tới cho dòng máy GPSMAP 66s nhé.</span></span>', 'content' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>GPSMAP 66s</strong>: Thiết bị cầm tay đa vệ tinh tích hợp cảm biến.</span></span><br /> <br /> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">GPSMAP 64s</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">: </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);">Độ nhạy máy thu cao, thiết bị có thể cùng lúc nhận được tín hiệu vệ tinh từ hai hệ thống GPS và GLONASS. GPSMAP 64s</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(29, 29, 29);"> kèm theo khí áp kế để đo cao độ, la bàn điện tử, kết nối USB tốc độ cao, hỗ trợ khe cắm thẻ nhớ, đồng thời có khả chia sẽ dữ liệu bằng Wireless với các thiết bị Garmin tương thích khác.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/So sánh GPS 66 và 64.jpg" style="width: 690px; height: 459px;" /><br /> <br /> <br /> <u><strong>>>> Cùng so sánh thông số kỹ thuật của hai dòng máy GPSMAP 66s và 64s:</strong></u></span></span><br /> <br /> <br /> <table border="1" cellpadding="0" cellspacing="0"> <tbody> <tr> <td style="width:161px;"> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 66s</strong></span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Garmin GPS 64s</strong></span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước tổng thể:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.2 x 16.3 x 3.5cm</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6.1 x 16 x 3.6cm</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kích thước màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3 inches</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2.6 inches</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ phân giải màn hình:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">240 x 400p (pixel)</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">160 x 240p (pixel)</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ nhớ khả năng:</span></span><br /> </td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">16GB</span></span><br /> </td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4GB</span></span><br /> </td> </tr> <tr> <td style="width:161px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Waypoint/Routes/ Tracklog:</span></span></td> <td style="width:211px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">20000 Điểm, 250 GPX Track và 300 điểm được lưu</span></span></td> <td style="width:18px;"> </td> <td style="width:202px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">10.000 điểm, 200 điểm được lưu</span></span></td> </tr> </tbody> </table> <br /> <ul> <li> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Theo dõi hoạt động thời tiết </span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tải xuống hình ảnh vệ tinh trực tiếp (không đăng ký)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chắc chắn theo tiêu chuẩn MIL-STD 810G cho hiệu suất nhiệt, sốc và nước.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ghi nhật ký Rinex</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Kết nối WiFi / Bluetooth</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Thiết kế phần cứng</strong><br /> Từ góc độ thiết kế, cả hai thiết bị đều cực kỳ giống nhau, với một vài khác biệt nhỏ về kích thước và màn hình<strong>. </strong>GPSMAP 66S có kích thước tổng thể lớn hơn một chút, nhưng sự khác biệt là gần như không thể nhận ra. Ngoài những thay đổi trực quan rõ ràng, họ cảm thấy khá giống với mẫu cũ. Những thay đổi khác là các nút nhỏ gọn hơn một chút nhưng rộng hơn. Các chức năng của nút giống nhau mặc dù phiên bản GPSMAP 66s có menu khác.<br /> <br /> Nút nguồn được đặt ở phía trên của thiết bị. Vị trí trên GPSMAP 64 có vẻ được ưu thích hơn vì bật / tắt dễ dàng nhưng bạn có thể hiểu lý do tại sao Garmin muốn thực hiện thay đổi này vì nó ít có khả năng bị hỏng khi bật thiết bị và lãng phí điện năng của bạn.<br /> <br /> Khác với những thay đổi đó và màn hình lớn hơn một chút, tất cả các cổng đều giống nhau, mặc dù Garmin đã thay đổi dây nguồn / dữ liệu thành MicroUSB. Khe cắm thẻ Micro SD có thể bên dưới pin.<br /> <br /> <strong>Tuổi thọ pin</strong><br /> Cả hai thiết bị đều hoạt động trên hai pin AA và tuổi thọ thông thường sẽ là 16 giờ mặc dù điều đó chủ yếu phụ thuộc vào chức năng ứng dụng và sử dụng GPS của bạn. GPSMAP 66 mới cũng có chức năng "<strong>Expedition"</strong> , giúp tăng đáng kể thời lượng pin của thiết bị bằng cách hạn chế các chức năng phần mềm tự động như điểm theo dõi, thời gian hiển thị và vào chế độ năng lượng thấp.<br /> <br /> <strong>Cách bật chế độ Expedition trên GPSMAP 66s</strong><br /> <br /> Chuyển đến menu chính của thiết bị> Chọn <strong>Cài đặt</strong> > Chọn "<strong>Expedition"</strong> . Sau đó, bạn sẽ được yêu cầu chọn "<em>Tự động, Nhắc hoặc Không bao giờ</em>".<br /> Chọn <em>Tự động</em> sẽ tự động đặt thiết bị sang chế độ thám hiểm sau hai phút hoạt động.<br /> Chọn <em>Nhắc </em>có nghĩa là lần sau khi bạn tắt thiết bị, nó sẽ yêu cầu bạn bật chế độ thám hiểm thay vì tắt.<br /> Chọn <em>Không bao giờ</em> sẽ tắt bất kỳ hình thức chế độ thám hiểm nào bạn đã chạy (Nhắc hoặc Tự động).<br /> <br /> <strong>Các tính năng phần mềm khả dụng trên cả hai thiết bị</strong><br /> Cả hai thiết bị đều có thể ghi lại các điểm / tuyến đường và nhật ký theo dõi, mặc dù GPSMAP 66s có thể ghi lại nhiều hơn.<br /> <br /> Một số tính năng của cả hai dòng máy:</span></span> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tính diện tích trên các thiết bị (chỉ cần đi bộ chu vi của khu vực).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng tải bản đồ tùy chỉnh - bạn có thể tải bản đồ tùy chỉnh tương thích với các thiết bị của Garmin (Garmin Topo hoặc thậm chí City Nav Maps). Nếu bạn tải một trong hai bản đồ này, thì bạn sẽ có quyền truy cập vào chức năng định tuyến tự động trên thiết bị. * Bạn cần sử dụng bản đồ Topo bản FULL để định tuyến.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Geocaching thân thiện - ứng dụng Geocaching được tải sẵn trên các thiết bị, mặc dù vậy bạn cần phải đăng ký thiết bị.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Lịch săn / cá - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông tin Mặt trời và Mặt trăng - được tải sẵn trên thiết bị</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng xem ảnh </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Kết nối GARMIN</strong><br /> <br /> Garmin Connect - khả dụng trên cả hai thiết bị cho phép thông tin hoạt động được gửi đến tài khoản kết nối Garmin của bạn và cho phép các tính năng được kết nối với điện thoại thông minh của bạn. Các tính năng được kết nối bao gồm Thông báo điện thoại, LiveTrack, GroupTrack.<br /> <br /> <strong>Chức năng cảm biến</strong><br /> Cả hai thiết bị GPS cầm tay trên đều có thể đo độ cao áp kế, la bàn bù 3 trục nghiêng. Việc đo độ cao áp kế sẽ có thể cung cấp cho bạn thông tin về những thay đổi của điều kiện thời tiết (giả sử bạn vẫn ở cùng độ cao) mặc dù nó cần phải được hiệu chỉnh đầy đủ. Cảm biến này cũng có thể được sử dụng để đo lường thay đổi độ cao của bạn và thậm chí đo lường thay đổi độ dốc AVG khi nhìn vào dữ liệu điểm của bạn.<br /> <br /> <strong>>>> Các tính năng phần mềm CHỈ khả dụng trên GPSMAP 66s:</strong><br /> <br /> - Tương thích với ứng dụng khám phá của Garmin - Sau khi được kết nối với ứng dụng điện thoại thông minh của bạn, ứng dụng khám phá của Garmin sẽ tự động đồng bộ hóa và chia sẻ điểm tham chiếu, tuyến đường và tuyến đường với thiết bị của bạn. Bạn cũng có thể tải bản đồ về điện thoại thông minh của mình để truy cập ngoại tuyến.<br /> <br /> - Theo dõi hoạt động thời tiết <br /> Garmin đã tăng thông tin thời tiết của họ một cách đáng kể với lần lặp này. Bây giờ bạn có thể nhận được rất nhiều dữ liệu thời tiết dựa trên thông tin dự báo thời gian thực. Họ có các tùy chọn bản đồ dự đoán riêng biệt về nhiệt độ, gió, mưa và mây. Nó cũng cung cấp radar thời tiết trực tiếp để bạn sẵn sàng thay đổi kế hoạch nếu bạn sắp bị bắt. Tính năng này không phụ thuộc vào kết nối Bluetooth hoạt động với điện thoại thông minh của bạn có bộ phận tiếp nhận. <br /> Hình ảnh vệ tinh hoạt động chính xác giống như trên loạt GPSMAP 64s nhưng bạn không còn phải trả tiền cho nó nữa.<br /> <br /> - Điểm mới của dòng GPSMAP 66s là khả năng tương thích với cửa hàng Connect Connect của Garmin, về cơ bản là 'App Store' của Garmin. <br /> <br /> - Chức năng InReach Remote: bạn có thể điều khiển thiết bị inReach mini của mình.<br /> <br /> - Đèn pin và SOS <br /> Một tính năng độc đáo khác là <strong>đèn pin LED</strong> rất sáng và<strong> đèn hiệu SOS</strong> có thể được sử dụng để báo hiệu sự giúp đỡ. Chức năng SOS chỉ là một nét khẩn cấp. Tuy nhiên, bạn cũng có thể đặt đèn pin nhấp nháy trong khoảng 1-9 lần mỗi giây.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Banner dán ảnh sp.jpg" style="width: 250px; height: 100px;" /><br /> <br /> </span></span>', 'images' => '202408021508551192007d993f13fc9de7ce32bd9bab16.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy định vị GPS cầm tay Garmin', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-28', 'modified' => '2026-07-12', 'status' => '1', 'view' => '27644', 'slug' => 'so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '217', 'rght' => '218', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 6 => array( 'Post' => array( 'id' => '636', 'name' => 'Máy thuỷ bình kỹ thuật số Leica LS10 và LS15', 'code' => null, 'alias' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span></span>', 'content' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Leica LS10 & LS15 giúp giảm nhiều công sức tính toán các công trình san lấp mặt bằng đòi hỏi khắt khe. Các tính năng tự động và độ chính xác 0,2mm và 0,3mm cho phép người dùng dễ dàng tính toán đo trong bất kỳ dự án nào một cách hiệu quả.</span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Leica LS10, LS15 có thể làm việc liên tục nhiều giờ, độ sai lệch gần như tuyệt đối không ảnh hưởng tới độ chính xác kết quả đo.<br /> <br /> Leica LS10, LS15 thường được dùng để đo chênh cao, đo khoảng cách với yêu cầu độ chính xác cao tuyệt đối. Máy có thể dẫn cao độ phục vụ cho vẽ thành lập bản đồ.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> Tính linh hoạt </span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Dòng máy thủy bình Leica LS10, LS15 được thiết kế để khảo sát, thực hiện san lấp mặt bằng thường xuyên trên các công trường xây dựng, kiểm tra hoặc giám sát các tòa nhà, đường sắt hoặc đường bộ. Với Leica LS10, LS15 bạn luôn có sẵn công cụ làm việc phù hợp.</span></span><br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ chính xác và độ tin cậy cao nhất</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bạn sẽ nhận được kết quả đáng tin cậy và chính xác ngay. Chất lượng quang học hàng đầu của Leica Geystems luôn mang lại hình ảnh có độ tương phản cao và giúp việc đọc chính xác và dễ dàng ngay cả trong điều kiện ánh sáng không thuận lợi. Do sự ổn định nhiệt độ cao, Leica LS10, LS15 luôn mang lại kết quả đáng tin cậy không ảnh hưởng bởi bức xạ mặt trời trực tiếp.</span></span><br /> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Chăm sóc khách hàng chỉ với một cú nhấp chuột.</strong> </span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông qua <a href="https://leica-geosystems.com/services-and-support/customer-support-services/active-customer-care">ACTIVE CUSTOMER CARE</a> - một mạng lưới toàn cầu gồm các chuyên gia giàu kinh nghiệm bạn sẽ được hướng dẫn một cách thành thạo mọi vấn đề:<br /> - Loại bỏ sự chậm trễ với dịch vụ kỹ thuật cao cấp<br /> - Hoàn thành công việc nhanh hơn với hỗ trợ tư vấn tuyệt vời<br /> - Tránh các lần truy cập trang web tốn kém với dịch vụ trực tuyến để gửi và nhận dữ liệu trực tiếp từ hiện trườn</span></span>g.<br /> <br /> <ul> <li> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cài đặt nhanh chóng và thuận tiện</span></span></strong></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tăng hiệu quả và giảm thời gian làm việc với Leica LS10, LS15. Sử dụng núm lấy nét để cài đặt nhanh chóng. Chuyển động tốt mang lại một hình ảnh hoàn hảo. LS10 & LS15 cung cấp cho bạn một mức độ bảo mật cao!</span></span><br /> <br /> <br /> <iframe allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen="" frameborder="0" height="394" src="https://www.youtube.com/embed/lBe6-DiokBQ" title="YouTube video player" width="700"></iframe>', 'images' => '20221227151040ffcdeffa3829f4a633ea0b404e2b4a0a.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy thuỷ bình Leica', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-25', 'modified' => '2026-07-12', 'status' => '1', 'view' => '26500', 'slug' => 'may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '215', 'rght' => '216', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 7 => array( 'Post' => array( 'id' => '635', 'name' => 'Ống nhòm và những lưu ý khi mua ống nhòm', 'code' => null, 'alias' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng tìm hiểu về ống nhòm và tham khảo một số lưu ý khi chọn ống nhòm!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Ống nhòm là gì?</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm, còn gọi là ống ngắm hay con mắt xa, là một hệ hai kính viễn vọng quang học được gắn cạnh nhau và cùng hướng, cho phép người quan sát đặt cả hai mắt để quan sát các vật ở xa. Cấu tạo gồm vật kính, thị kính và thường có thêm hệ thống lăng kính. Vật kính bao gồm một thấu kính hội tụ, thị kính là thấu kính hội tụ có tiêu cự nhỏ nhất nhưng sẽ làm hình ảnh bị ngược nên cần thêm lăng kính đảo ảnh.<br /> <br /> * Cấu tạo ống nhòm gồm một hệ thống hai thấu kính hội tụ đặt đồng trục.</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Vật kính L1: tiêu cự f1 rất dài (vài m)</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thị kính L2: tiêu cự f2 ngắn (vài cm) và được sử dụng như kính lúp</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách giữa thị kính và vật kính thay đổi được.<br /> <br /> <img alt="" src="/admin/webroot/upload/image/images/Cấu tạo ống nhòm.png" style="width: 300px; height: 383px;" /><br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Tìm hiểu về các thông số về ống nhòm</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Thông thường ta hay nhìn thấy ký hiệu 7×50, 8×40, 10×42, 15×70, 25×100… ở trên các ống nhòm. Hai chữ số này nói lên điều gì?<br /> <br /> <u>Ví dụ</u>: <span style="color:#000000;"><span style="text-align: justify;">Ống nhòm Nikon MONARCH 7 10x42</span></span><br /> <br /> <strong>10</strong> - số đằng trước dấu nhân (x) sẽ là độ phóng đại của ống nhòm đó (tức là 10 lần).<br /> <strong>42</strong> - số đằng sau dấu nhân sẽ là đường kính của vật kính ống nhòm theo đơn vị millimet ( tức là 42mm).<br /> <br /> Thông số độ phóng đại có nghĩa là bạn sẽ nhìn vật đó gần lại bạn 10 lần theo tỉ lệ xấp xỉ 1/10. Có nghĩa là bạn nhìn một vật xa 1km bằng ống nhòm, thì khi đó như bằng mắt thường bạn nhìn 100m.<br /> <br /> Nhiều bạn hay thắc mắc một câu hỏi khi mua ống nhòm: <strong>ống nhòm này nhìn bao xa?</strong> Thực chất cái xa vô cùng mà mình nói ở đây nó là một vật đủ lớn mà khi nhìn qua ống nhòm chúng ta có thể thấy nó và nhìn được hình dạng của nó. Điều quan trọng mà các bạn hay bỏ quên đó là ”chất lượng ảnh như thế nào?” thì rất ít bạn quan tâm. Đây là điều quan trọng để đánh giá một chiếc ống nhòm tốt hay không?</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đường kính vật kính là thông số được tính bằng đơn vị mm. Nếu vật kính càng lớn thì khả năng thu sáng và chất lượng ảnh của bạn sẽ càng tốt và ngược lại. Tuy nhiên nếu mà lớn quá thì một trong những nhược điểm đó là ảnh quan sát thu được sẽ bị sai sắc (là điều không thể tránh khỏi). Bởi vậy khi lựa chọn mua ống nhòm thì các bạn nên chọn sao cho phù hợp với độ phóng đại ống nhòm mà mình mong muốn. Ví dụ 7×50, 8×40, 10×42, 10×50, 12×60, 15×70…</span></span></p> <p> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Xuất xứ tất cả các loại ống nhòm hiện nay</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm hiện nay có ba nguồn gốc xuất xứ chính, đó là tự lực sản xuất sản phẩm, OEM và ODM. Vậy những khái niệm này là gì?</span></span></p> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Những sản phẩm đến từ các thương hiệu tự lực sản xuất có nghĩa là ống nhòm của thương hiệu này được thiết kế và gia công bởi chính một đơn vị. Tuy nhiên hiện nay có khá ít thương hiệu có thể tự lực sản xuất được mà không nhờ bên thứ ba. Đối với những sản phẩm được tự lực sản xuất này thì sẽ mang đậm dấu ấn của thương hiệu và không bị ảnh hưởng bởi các yếu tố kỹ thuật từ các bên. Tuy nhiên những chiếc ống nhòm được tự lực sản xuất có giá thành khá cao.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm <strong>OEM</strong> là những chiếc ống nhòm được công ty chủ chủ quản thiết kế nhưng lại không trực tiếp gia công, mà phải nhờ đến một bên thứ 3. Đơn vị gia công sẽ hoàn thiện sản phẩm dựa trên bản thiết kế và chịu sự kiểm soát chất lượng từ đơn vị chủ quản thiết kế. Với hình thức này thì sản phẩm thường có giá thành rẻ hơn nhưng về dấu ấn thương hiệu của sản phẩm thì không nổi bật nhiều.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Và hình thức cuối cùng là sản phẩm <strong>ODM</strong>, những sản phẩm ống nhòm thường đến từ các thương hiệu có khả năng kinh doanh nhưng không có khả năng thiết kế hay gia công sản phẩm. Ống nhòm của những thương hiệu này sẽ được đặt thiết kế và gia công ở một đơn vị nào đó và in thương hiệu của mình lên.</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Việc xác định được nguồn gốc của sản phẩm cũng là cách chọn mua ống nhòm mà bạn nên lưu tâm. Mỗi thương hiệu đều có một ưu nhược điểm riêng, tùy vào nhu cầu bạn có thể lựa phương thức sản xuất phù hợp.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Phân loại các loại ống nhòm hiện nay theo chức năng</strong></span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trên thị trường có rất nhiều loại ống nhòm khác nhau, dưới đây là một số loại ống nhòm phố biến được nhiều người lựa chọn nhất.<br /> - <strong>Ống nhòm mini</strong> là loại ống nhòm có kích thước gọn nhẹ đến bất ngờ, tuy nhiên tầm nhìn thì hơi hạn chế. Loại ống nhòm này có kích thước rất nhỏ nên có thể bỏ trong balo, túi xách để mang theo bên người, trong các chuyên tham quan, thám hiểm, du lịch.<br /> - <strong>Ống nhòm ban đêm</strong> là loại ống nhòm có khả năng nhìn xuyên bóng tối nhờ được trang bị đèn hồng ngoại. Hình ảnh nhìn được trong bóng tối qua ống nhòm hồng ngoại thường không màu. Ngoài ra, loại ống nhòm hồng ngoài ngày còn được tích hợp tích năng ghi hình, chụp ảnh.<br /> - <strong>Ống nhòm chụp ảnh</strong> là loại ống nhòm được tích hợp thêm chức năng bắt lại những khoảnh khắc đẹp khi chúng ta quan sát. Tuy nhiên, vì không phải là thiết bị chuyên về chụp ảnh nên hình ảnh chụp được có chất lượng còn hạn chế.<br /> - <strong>Ống nhòm đo khoảng cách</strong> là loại ống nhòm ngoài việc quan sát một đối tượng thì còn đo được khoảng cách từ chỗ chúng ta đứng đến vật thể. Ngoài ra, loại ống nhòm này còn được tích hợp tính năng đo góc, đo chiều cao<br /> - <strong>Ống nhòm nhiệt</strong> loại ống nhòm hiện đại có khả năng hiển thị thân nhiệt của đối tượng bạn đang quan sát, cũng như phân biệt được đối tượng với môi trường xung quanh nhờ sự chênh lệch nhiệt độ.<br /> <br /> </span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5. Một số lưu ý khi chọn ống nhòm phù hợp với nhu cầu</strong></span></span></h2> <p> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.1 Kích thước ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Ống nhòm có kích thước lớn Full-Size (8x42, 10x50)<br /> Các dòng ống nhòm có kích thước lớn thường thu nhận ánh sáng tốt hơn, có thể xem và quan sát trong điều kiện ánh sáng yếu như lúc bình minh hay hoàng hôn. Các ống nhòm này sẽ cung cấp cho bạn cái nhìn rộng lớn về quang cảnh phía trước, thích hợp cho ngắm chim, động vật hoang dã,... nhưng ngược lại kích thước của chúng lại lớn và thường rất nặng.<br /> <br /> - Ống nhòm có kích thước trung bình Mid-Size (7x40, 16x32, 10x42)<br /> Các dòng ống nhòm có kích thước trung bình thường được sử dụng cho ngắm cảnh thiên nhiên, cho các hoạt động du lịch dã ngoại hoặc sử dụng để quan sát các buổi biểu diễn, xem các trận bóng đá,... Ống nhòm này có kích thước vừa phải, khả năng quan sát tốt, trọng lượng phù hợp với mọi người. Tuy nhiên mức độ truyền dẫn ánh sáng lại không được bằng ống nhòm có kích thước lớn.<br /> <br /> - Ống nhòm có kích thước nhỏ gọn - ống nhòm mini (6x18, 8x21)<br /> Các loại ống nhòm này thường thích hợp để sử dụng cho các hoạt động ban ngày. Đây là loại ống nhòm có kích thước nhỏ gọn, cầm vừa tay, thoải mái khi sử dụng trong thời gian dài.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/genmedia_PIC1739447_RL_02_w1500_h1500_c217224230255(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.2 Độ phóng đại của ống nhòm</strong></span></span></h3> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mỗi ống nhòm thường được xác định bởi hai cặp số. Số đầu tiên chỉ độ phóng đại của ống nhòm và số thứ 2 thể hiện đường kính vật kính của ống nhòm. Ở đây ta thấy đối với ống nhòm có độ phóng đại lớn hình ảnh quan sát được sẽ càng gần hơn. Tuy nhiên, nếu bạn chọn ống nhòm có độ phóng đại quá lớn, ống nhòm siêu zoom thì kích thước lớn sẽ làm tăng độ rung khi tay bạn cầm không chắc dẫn đến hiện tượng mỏi mắt.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.3 Đường kính ống kính mục tiêu rộng</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Giống như độ phóng đại, thông số thứ 2 của ống nhòm là về đường kính ống kính vật kính. Đường kính ống kính càng rộng cho phép tiếp nhận càng nhiều ánh sáng hơn. Khi nhiều ánh sáng bạn sẽ quan sát thấy hình ảnh tươi sáng hơn đặc biệt là trong điều kiện ánh sáng yếu như hoàng hôn hay lúc bình minh.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/ong-nhom-hong-ngoai-2-mat-co-ghi-hinh-4x50mm-equinox-z_2253.png" style="width: 420px; height: 329px;" /></span></span></p> <p style="text-align: center;"> </p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.4 Thoát sinh học - Exit Pupil</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Độ thoát sinh học cho biết ảnh, độ sáng của vật thể khi đang quan sát. Nếu thông số này lớn sẽ làm cho hình ảnh quan sát được rõ nét hơn, tươi sáng hơn. Cách tính toán thông số này bằng cách lấy đường kính phóng đại chia cho độ phóng đại của ống kính. Nếu thông số này nằm ở ngưỡng 7 thì đó là ống kính tốt có thể lựa chọn để quan sát các vật trong ánh trời sáng trăng, lúc ánh sáng yếu, ở ngưỡng 5mm hoặc cao hơn sẽ thích hợp cho quan sát ban ngày hoặc ánh sáng yếu.<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.5 Khoảng cách đặt mắt - Relief Eye</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Relief Eye là khoảng cách đặt mắt giữa thị kính tới mắt của bạn sao cho khả năng quan sát tốt nhất thoải mái nhất. Khoảng đặt mắt càng lớn bạn lại càng phải đưa ống nhòm ra xa hơn so với mắt mình, nhưng lại tốt đối với những người đeo kính (đối với những người đeo kính nên chọn thông số này là 11mm hoặc cao hơn).<br /> <br /> </span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.6 Trường nhìn</strong></span></span></h3> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trường nhìn là thông số cho phép bạn biết độ rộng khu vực mình muốn quan sát tại khoảng cách 1000m từ nơi bạn đang đứng. Trường nhìn rộng để quan sát thiên nhiên, quan sát động vật, trường nhìn hẹp giúp quan sát các đối tượng ít di chuyển.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/nikon-coolshot-40-i-4(1).jpg" style="width: 420px; height: 420px;" /></span></span></p> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.7 Hệ thống lấy nét</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm thường được trang bị hệ thống lấy nét ở trung tâm cho cả hai mắt, hoặc điều chỉnh diop trên cả hai mắt. Việc điều chỉnh diop trên hai mắt giúp bù đắp những hạn chế về thị lực giữa hai mắt của bạn.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.8 Lớp phủ thấu kính</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ống nhòm giá rẻ thường không được tráng phủ nhiều lớp ra vậy cảm giác nhìn qua ống nhòm này thường mờ và không rõ nét. Lớp phủ thấu kính giúp giảm sự phản xạ ánh sáng và tăng khả năng truyền dẫn ánh sáng.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.9 Khả năng chống nước và kháng thời tiết</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng chống nước trên ống nhòm có thể là khả năng chịu nước, khả năng chống thấm, khi sử dụng ở điều kiện thời tiết thay đổi, nhiệt độ thay đổi.<br /> Các loại ống nhòm du lịch thường được trang bị khả năng chống nước mưa, ống nhòm quân sự, ống nhòm hải quân có thể được trang bị thêm khả năng chịu được áp lực nước hoặc nổi trên mặt nước.<br /> <br /> </span></span> <h3> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>5.10 Khả năng chống đọng sương</strong></span></span></h3> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các loại ống nhòm giá rẻ thường bị mờ sương khi di chuyển qua lại giữa các vùng có nhiệt độ khác nhau. Mờ sương gây nhiều phiền toái cho bạn, thậm chí có thể làm hỏng ống nhòm nếu không loại bỏ độ ẩm đó ra khỏi ống nhòm.<br /> Hiện nay, các ống nhòm chuyên dụng, ống nhòm cao cấp đã được bơm các loại khí trơ, khí nitor bên trong ống nhòm để tránh gây hiện tượng ngưng tụ hơi nước. Điều này giúp bảo vệ ống nhòm của bạn tránh đọng sương lên bền mặt ống kính.</span></span><br /> <br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">6. Địa chỉ mua ống nhòm/ ống nhòm đo khoảng cách uy tín</span></span></h2> <p id="2-dia-chi-mua-thiet-bi-may-bay-khong-nguoi-lai-uav-uy-tin" style="margin: 0px; padding: 0px; font-family: arial; line-height: 19px; color: rgb(51, 51, 51); text-rendering: optimizelegibility; font-size: 31.5px; text-align: justify;"> </p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại ống nhòm/ ống nhòm đo khoảng cách của các hãng Leica, Nikon, Barska, Garmin, Terrinox, Steiner, SNDWAY, ... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="color: rgb(51, 51, 51); text-align: justify;"> </span><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"> </span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span><br /> ', 'images' => '20210714155415df03af942339bf722676fd2f752f2a1f.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'ống nhòm đo khoảng cách', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-14', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24581', 'slug' => 'ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '213', 'rght' => '214', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 8 => array( 'Post' => array( 'id' => '634', 'name' => 'Phụ kiện trắc địa', 'code' => null, 'alias' => 'phu-kien-trac-dia', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">1. Phụ kiện trắc địa là gì?</span></span></h2> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện trắc địa được biết đến là những sản phẩm thiết yếu, hỗ trợ thiết bị đo đạc hoạt động tốt hơn, dễ dàng và đảm bảo được những yếu tố về tính tiện dụng, hiệu quả và chính xác khi đo đạc.</span></span></p> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Hầu hết những phụ kiện trắc địa đều thiết kế có thể tách rời với máy, phòng trong những trường hợp bị hư hỏng, chỉ phải thay thế phụ kiện mới. Điều này khiến cho việc lắp ráp phụ kiện cũng như sử dụng các máy trắc địa được linh hoạt với mọi trường hợp.<br /> Phụ kiện đo đạc, trắc địa bao gồm nhiều loại khác nhau ứng dụng cho các thiết bị đo đạc ( máy thủy bình, máy kinh vĩ điện tử, máy toàn đạc điện tử, máy định vị GPS) như: thước thép, bật mực, đế dọi tâm, thước đẩy bánh xe, mốc sứ, thùng máy, gương sào, đế dọi tâm, chân mia, dây cáp, pin sạc,…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/PHỤ KIỆN TRẮC ĐỊA(2).png" style="width: 680px; height: 544px;" /></span></span></p> <p style="text-align: center;"> </p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">2. Lưu ý khi lựa chọn phụ kiện trắc địa</span></span></h2> <br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải đảm bảo phù hợp với cấu tạo của máy, chức năng của máy.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải cùng hãng sản xuất hoặc phải là sản phẩm chính hãng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải phù hợp với công suất của máy, tránh trường hợp chọn phụ kiện có công suất thấp hoặc lớn hơn công suất thực của máy gây hư hỏng.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Phụ kiện phải có cấu tạo tính năng tương đồng với từng đời máy</span></span></li> </ul> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <img alt="" src="/admin/webroot/upload/image/images/Phụ kiện máy(2).jpg" style="width: 620px; height: 803px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">3. Địa chỉ mua phụ kiện trắc địa uy tín</span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên nhập khẩu và cung cấp các loại phụ kiện trắc địa: chân máy toàn đạc, chân máy thủy bình, mia 5m, mia Invar, sào gương, pin máy toàn đạc, sạc pin máy toàn đạc, đế máy, cáp trút số liệu,... uy tín lâu năm trên toàn quốc. </span></span></span></span><br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> </span><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></span></span></div> <br style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 145 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"> </span><br style="margin: 0px; padding: 0px; font-family: arial; font-size: 13px;" /> <span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">@ Luôn đồng hành cùng bạn!</strong></span></span></span></span></span></span>', 'images' => '20211207150823dc9ff8b8d2712352c76fd4e56030baca.png', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Phụ kiện trắc địa', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-12', 'modified' => '2026-07-12', 'status' => '1', 'view' => '24887', 'slug' => 'phu-kien-trac-dia', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '211', 'rght' => '212', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ), (int) 9 => array( 'Post' => array( 'id' => '632', 'name' => 'Một số lưu ý khi chọn mua máy bộ đàm', 'code' => null, 'alias' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cùng chúng tôi tham khảo một số lưu ý để lựa chọn cho mình một chiếc bộ đàm phù hợp nhé!</span></span>', 'content' => '<h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Lựa chọn băng tần sử dụng</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm cầm tay và máy bộ đàm cố định có 2 loại băng tần là VHF (136 – 174MHz) và UHF (400 – 527MHz).<br /> <br /> Nếu mua thêm để dùng chung với máy có sẵn, phải xác định máy bộ đàm đang dùng là loại băng tần nào (VHF hay UHF) và model là gì. Trong trường hợp đây là lần đầu tiên mua bộ đàm và chỉ có nhu cầu dùng chúng với nhau thì người dùng có thể chọn loại băng tần nào cũng được. Tùy thuộc vào địa hình, khu vực sử dụng và để đảm bảo liên lạc xa nhất, tốt nhất bạn nên chú ý:</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ở vị trí khu vực trống trải, ít vật cản nên chọn băng tần VHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tại khu vực nhà cao tầng, nhiều công trình dân dụng, trong thành phố nên chọn tần số UHF.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Cũng cần lưu ý đến khả năng được cấp phép sử dụng tần số tại vùng sử dụng bộ đàm.</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>Lưu ý:</strong></span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khoảng cách liên lạc tối đa giữa hai máy cầm tay tại khu vực trống trải là khoảng 3km, trong thành phố không quá 2km. Những vị trí càng đông dân cư, càng nhiều công trình kiến trúc. Mật độ dân cư đông thì cự ly sẽ rút ngắn lại.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ đàm cầm tay có thể liên lạc với trung tâm của mình ở cự ly xa hơn so với cự ly giữa 2 máy cầm tay. Điều kiện là máy tại trung tâm phải có công suất lớn. Và anten đặt trên cột cao (càng cao thì liên lạc càng xa).</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu muốn tăng cự li liên lạc giữa các máy với nhau, có thể chọn dùng Repeater (Bộ lặp) với anten lắp trên cao.</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><img alt="" src="/admin/webroot/upload/image/images/1534383704-bodam_02.jpg" style="width: 480px; height: 360px;" /></strong></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Lựa chọn dòng máy phù hợp</strong></span></span></h2> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Tùy thuộc vào khả năng tài chính cũng như nhu cầu mà lựa chọn dòng máy phù hợp. Trên thị trường hiện nay có khá nhiều thương hiệu máy bộ đàm. Nổi bật hơn cả là các dòng máy đến từ thương hiệu Motorola, Icom và Kenwood. Các dòng sản phẩm khác được đánh giá là có độ bền kém hơn, chất lượng thu phát cũng không tốt bằng.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu dùng cho công trường xây dựng hay dịch vụ bảo vệ thì nên chọn loại có cấu hình trung bình. Motorola CP1100, CP1300, GP3188 loại không bàn phím với khả năng kháng nước, chống bụi, chống va đập tốt là một gợi ý.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các công ty vận tải, vận chuyển hàng hóa/hành khách…thì có thể chọn máy bộ đàm gắn xe cố định như Motorola GM3188, GM338. Nếu công ty yêu cầu đảm bảo quản lý liên lạc tại nhiều khu vực địa lý có khoảng cách xa thì phải chọn dòng máy kĩ thuật số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Với bộ đàm dùng cho nhà hàng, khách sạn, khu công nghiệp thì nên chọn dòng máy bộ đàm cầm tay giá rẻ như Motorola MagOne A8, GP2000s, Kenwood TK-2107 hay Icom IC-F3003 đều được.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối với các đơn vị chuyên nghiệp mà yêu cầu sản phẩm cần phải đảm bảo an ninh để liên lạc thông suốt kể cả trong điều kiện thời tiết khắc nghiệt, môi trường phức tạp như Công an, Bộ đội, phục vụ công tác Phòng chống thiên tai, bão lũ, các công ty dầu khí…bộ đàm được lựa chọn phải là dòng chuyên nghiệp, chuyên dụng và hiệu suất cao\</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm phổ thông có giá thành tương đối rẻ, cấu hình vừa đủ đáp ứng những yêu cầu đơn giản. Vừa hài hòa về chi phí, vừa mang lại hiệu quả công việc. Trong khi đó, các dòng sản phẩm chuyên nghiệp thường có mức giá cao hơn với nhiều tính năng hơn.<br /> <br /> Có thể nói, dòng sản phẩm máy bộ đàm đến từ thương hiệu Motorola hiện đang đứng đầu về công nghệ (cả analog và digital). Nhờ vào ưu điểm là độ bền cao, khả năng chống chịu tốt cũng như cách vận hành đơn giản. Các dòng sản phẩm chuyên dụng có thể kể đến như Motorola GP3188, GP328, XiR P8200/8208, P8260/8268…</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/business-radios-2021.png" style="width: 480px; height: 238px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2 style="box-sizing: border-box; margin-top: 0px; margin-bottom: 0.5rem; font-weight: 500; line-height: 1.2; font-size: 20px; color: rgb(68, 68, 68); font-family: Roboto, sans-serif;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="box-sizing: border-box; font-weight: 600;">3. Lựa chọn máy bộ đàm với những tính năng phù hợp</span></span></span></h2> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất phát RF: Máy cầm tay thường có công suất tối đa khoảng 5W, con số này càng cao thì cự ly liên lạc càng lớn.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Công suất âm thanh: Nếu sử dụng trong môi trường ồn ào, nhiều tiếng động. Thì nên chọn máy công suất lớn có bộ lọc âm thanh tốt.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Các tính năng bảo vệ: Máy được thiết kế với kết cấu vững chắc, theo tiêu chuẩn quân đội Mỹ (MIL-STD810), chống nước, chống nổ…</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Mạch mã hóa và giải mã PL/DPL, CTCSS/DTCS: Tránh được những cuộc liên lạc không cần thiết khi nhiều người dùng chung 1 kênh tần số.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chức năng kích phát bằng giọng nói (VOX) để hoạt động khi rảnh tay</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng nhập tần số từ bàn phím của máy: Thường được trang bị ở các dòng máy phổ thông. Tuy vậy, tính năng này lại khiến người dùng vô tình làm sai tần số kênh đã đặt ra khiến máy bộ đàm không liên lạc được với máy khác.</span></span></li> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Khả năng bảo mật thông tin: Nhiều cấp bảo mật khác nhau như Voice Scramler, AES/DES…</span></span></li> </ul> <p style="text-align: center;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> <br /> <img alt="" src="/admin/webroot/upload/image/images/MotorolaG3588.jpg" style="width: 480px; height: 480px;" /></span></span></p> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>4. Chọn phụ kiện bộ đàm</strong></span></span></h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Pin bộ đàm</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nên chọn pin dung lượng lớn, thời gian sử dụng lâu cho mỗi lần sạc. Pin cho máy bộ đàm nên từ 1000mAh – 2200mAh với thời gian hoạt động tối đa đến 19 giờ.<br /> Pin Li-Ion có dung lượng lớn và tuổi thọ pin cao có thể sạc bất cứ lúc nào mà không cần dùng hết trước khi sạc như các loại pin khác. Pin Ni-MH có dung lượng và tuổi thọ pin thấp hơn Li-Ion. Muốn pin sử dụng bền lâu thì không thể sạc nhồi mà phải dùng hết trước khi sạc lại. Trong trường hợp dùng lâu, để tránh bị hết pin bất ngờ, hãy mua thêm pin dự phòng để đảm bảo liên lạc được thông suốt.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Bộ sạc</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Nếu không có thời gian sạc pin lâu, hãy sử dụng bộ sạc nhanh, nhanh hơn bộ sạc chuẩn từ 3-5 giờ.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Loa – Micro và các loại tai nghe choàng đầu, áp cổ</span></span></li> </ul> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đảm bảo liên lạc kể cả khi đeo máy thường xuyên ở thắt lưng, trên cầu vai/gắn trên cổ áo. Phù hợp với những ai thường xuyên dùng tay cho những công việc khác như bảo an, nhân viên phục vụ…<br /> Tai nghe choàng đầu và bộ áp cổ khi dùng với máy có chức năng kích phát bằng giọng nói (VOX) sẽ giúp rảnh tay hoàn toàn khi liên lạc bằng bộ đàm. Bộ áp cổ sẽ giúp âm thanh gửi đi trong hơn, không có tiếng ồn kể cả khi đang nói trong khu vực nhiều tiếng ồn.</span></span><br /> <ul> <li> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Anten</span></span></li> </ul> <p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Máy bộ đàm của mỗi hãng khác nhau đều kèm theo anten tiêu chuẩn, cho cự li liên lạc tốt nhất. Loại cải tiến kích có thước ngắn hơn giúp máy gọn và đỡ vướng víu. Anten không phù hợp có thể làm hư hỏng máy. Do vậy, nếu cần một anten mới, hãy chọn đúng mã số của loại kèm theo máy.</span></span></p> <p style="text-align: center;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><img alt="" src="/admin/webroot/upload/image/images/bo-dam-motorola-gp-3588-plus(1).jpg" style="width: 480px; height: 270px;" /></span></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"> </span></span><br /> <h2> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ mua máy bộ đàm uy tín</span></span></h2> <p> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">CÔNG TY CP CÔNG NGHỆ VÀ TM THÀNH ĐẠT chuyên phân phối các loại máy bộ đàm của các hãng Motorola, Kenwood, Icom, Hypersia,... lâu năm uy tín trên toàn quốc.</span></p> <div style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Với hơn 20 năm kinh nghiệm cùng</span></span><span style="margin: 0px; padding: 0px;"> <span style="margin: 0px; padding: 0px;">đội ngũ nhân viên, kỹ thuật viên năng động, có trình độ cao </span>chúng tôi tự hào và tin tưởng Quý khách hàng sẽ hài lòng khi sử dụng các sản phẩm và dịch vụ do chúng tôi cung cấp.</span></span></span></div> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;"><u style="margin: 0px; padding: 0px;"><strong style="margin: 0px; padding: 0px;">Liên hệ: </strong></u><br style="margin: 0px; padding: 0px;" /> <br style="margin: 0px; padding: 0px;" /> Số 50 Láng Hạ, Đống Đa, Hà Nội<br style="margin: 0px; padding: 0px;" /> Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội<br style="margin: 0px; padding: 0px;" /> Tel: 024.37764930<br style="margin: 0px; padding: 0px;" /> Hotline: 0913051734 (call/imesage/zalo)<br style="margin: 0px; padding: 0px;" /> Website: <a href="http://www.tracdiathanhdat.vn/?fbclid=IwAR3altI5BIG46Mm2_6oxBl-TQxXGfXGEm4M1GUGsoDeNELr3WrYUlO7g2jk" style="margin: 0px; padding: 0px; color: rgb(74, 75, 75); text-decoration-line: none; transition: color 0.2s linear 0s; font-size: 13px;" target="_blank">www.tracdiathanhdat.vn</a><br style="margin: 0px; padding: 0px;" /> Email: tracdiathanhdat@gmail.com</span></span></span></span><br style="margin: 0px; padding: 0px;" /> </p> <p style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">@ Luôn đồng hành cùng bạn!</strong><span style="margin: 0px; padding: 0px;"> </span></span></span></p> ', 'images' => '20210709160653d0336e3b94fd76fc2ef669058d11917a.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'máy bộ đàm', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-07-09', 'modified' => '2026-07-12', 'status' => '1', 'view' => '15419', 'slug' => 'mot-so-luu-y-khi-chon-mua-may-bo-dam', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '209', 'rght' => '210', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) ) $detailNews = array( 'Post' => array( 'id' => '494', 'name' => 'Cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử', 'code' => null, 'alias' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'cat_id' => '40', 'price' => '0', 'type' => 'new', 'shortdes' => '<span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Hãy cùng chúng tôi tìm hiểu cách kiểm tra và hiệu chỉnh máy kinh vĩ điện tử nhé!</span></span>', 'content' => '<h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px; text-align: justify;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="1bot-thuy-dai" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1. Bọt thủy dài</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên chân và tiến hành cân máy </span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Chỉnh tâm bọt khí bằng vít cân máy A</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-dai.png" style="width: 380px; height: 269px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="2bot-thuy-tron" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2. Bọt thủy tròn</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.</span></span></span></p> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-bot-thuy-tron1.png" style="width: 380px; height: 265px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="3kinh-doi-tam" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">3. Kính dọi tâm</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)</span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đăt thiết bị lên chân ( không cần cân bằng)</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay máy đi 180 độ</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;"><img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-kinh-doi-tam.png" style="width: 720px; height: 285px;" /></span></span></span></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Lặp lại các bước kiểm tra</span></span></span></li> </ul> <p> <img alt="" src="/admin/webroot/upload/image/images/hieu-chinh-doi-tam 3.png" style="width: 226px; height: 320px;" /></p> <h3 style="box-sizing: border-box; margin: 0px; padding: 0px 0px 15px; color: rgb(51, 51, 51); font-family: Arial, sans-serif; line-height: 24px; font-size: 20px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span id="4-sai-so-diem-0-ban-do-dung" style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">4. Sai số điểm 0 bàn độ đứng</span></span></span></span></h3> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">1) Kiểm tra</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Đặt máy lên và cân máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <em><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.</span></span></span></em></p> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">2) Hiệu chỉnh</span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị. </span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);"> Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng. </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 1(1).png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> VR mang ra giá trị góc đứng của mục tiêu P </span></span></span><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center;"> </span><img alt="" src="/admin/webroot/upload/image/images/VR 2.png" style="font-size: 14px; font-family: tahoma, geneva, sans-serif; text-align: center; width: 180px; height: 40px;" /></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Giá trị VR lưu giữ hiển thị ở dòng phía bên màn hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới. <img alt="" src="/admin/webroot/upload/image/images/VR 3.png" style="width: 180px; height: 41px;" /></span></span></span></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Mục tiêu P có góc đứng hiển thị ở dòng dưới <img alt="" src="/admin/webroot/upload/image/images/VR4.png" style="width: 180px; height: 41px;" /></span></span></span></p> <p> </p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ</span></span></span></li> </ul> <p style="box-sizing: border-box; margin: 0px 0px 15px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px;">> Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC 1.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></p> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square; text-align: left;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ. </span></span></span><img alt="" src="/admin/webroot/upload/image/images/TILT.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 41px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.</span></span></span></li> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2 </span></span></span><img alt="" src="/admin/webroot/upload/image/images/AC3.png" style="color: rgb(34, 34, 34); font-family: Arial, Verdana, sans-serif; font-size: 12px; width: 180px; height: 40px;" /></li> </ul> <ul style="box-sizing: border-box; margin: 0px 0px 20px; padding: 0px; color: rgb(0, 0, 0); font-family: Arial, Arial; font-size: 13px; text-align: justify;"> <li style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: square inside none;"> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(0, 0, 0);">Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.</span></span></span></li> </ul> <div style="box-sizing: border-box; margin: 0px; padding: 0px; color: rgb(102, 102, 102); line-height: 24px; list-style: inside none square;"> <img src="http://tracdiathanhdat.vn/admin/webroot/upload/image/images/hotline.png" style="height: 100px; width: 250px;" /></div> ', 'images' => '20170911075630e672d20fd038cdf903acb9804399e23d.jpg', 'images_multi' => '', 'pos' => null, 'new' => null, 'hot' => null, 'saleoff' => null, 'title_seo' => 'Máy kinh vĩ', 'meta_key' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'meta_des' => 'Chuyên cung cấp máy GPS RTK, máy thủy bình, máy toàn đạc, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'created' => '2017-09-11', 'modified' => '2026-07-12', 'status' => '1', 'view' => '40085', 'slug' => 'cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '19', 'rght' => '20', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'parent_id' => null, 'alias' => 'kien-thuc-ung-dung', 'images' => '', 'lft' => '103', 'rght' => '104', 'pos' => '5', 'status' => '1', 'title_seo' => 'Kiến thức – Ứng dụng Trắc Địa | Hướng dẫn chọn thiết bị & quy trình đo thực tế', 'meta_key' => '', 'meta_des' => 'Chia sẻ kiến thức trắc địa, hướng dẫn chọn máy RTK, toàn đạc, GPS cầm tay và kinh nghiệm đo đạc thực tế giúp tối ưu thiết bị và nâng cao hiệu quả công việc. ', 'created' => '2015-12-16', 'modified' => '2026-02-24', 'slug' => 'kien-thuc-ung-dung', 'cate' => '4', 'link' => 'tin-tuc', 'name_eng' => '', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => 'Tổng hợp kiến thức, kinh nghiệm và hướng dẫn ứng dụng thiết bị trắc địa trong công việc thực tế!', 'display' => '0', 'content_eng' => null ) ) $setting = array( 'id' => '1', 'name' => 'Công ty CP Công nghệ và Thương mại Thành Đạt', 'title' => 'Chuyên phân phối máy đo đạc, trắc địa: Máy GPS RTK, máy thủy bình, máy toàn đạc, máy scanner, UAV chính hãng (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...)', 'address_eng' => '', 'address' => '<p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>Văn phòng</u></strong></span></span><span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family:tahoma,geneva,sans-serif;">MST:<strong><a href="javascript: void(0)" style="font-size:11px;"><span style="color:#ffffff;"> 0103764857 </span></a></strong>do Sở KHĐT TP. Hà Nội cấp ngày 28-04-2009<br /> Điện thoại: <a href="javascript: void(0)" style="font-family: tahoma, geneva, sans-serif;font-size:11px;"><span style="color: rgb(255, 255, 255);"><strong style="font-family: arial, helvetica, sans-serif;">(</strong><strong style="font-family: arial, helvetica, sans-serif;">024) 3776 4930</strong></span></a></span></span></p> <div> <p> <strong style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"><u>Cửa hàng</u></strong><span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;">:</span></p> </div> <p> <span style="font-family: tahoma, geneva, sans-serif;">- <span style="font-size:12px;">Số <strong><span style="font-size:14px;">145 </span></strong></span></span><span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">Láng Hạ, Phường Đống Đa, Hà Nội</span></span></p> <p> <span style="font-size:12px;"><span style="font-family: tahoma, geneva, sans-serif;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></span><br /> <br /> <a class="dmca-badge" href="//www.dmca.com/Protection/Status.aspx?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" title="DMCA.com Protection Status"> <img alt="DMCA.com Protection Status" src="https://images.dmca.com/Badges/dmca-badge-w100-5x1-11.png?ID=65d4df03-1f2e-4d30-bf68-67f5ac238ff9" /></a> <script src="https://images.dmca.com/Badges/DMCABadgeHelper.min.js"> </script></p> ', 'contactinfo_eng' => '', 'taikhoan' => '<strong><span style="color:#04529a;">Số Tài khoản các ngân hàng của công ty Tân Á</span></strong><br /> <br /> 1. 13022-0506-5430 - Nguyễn Văn Hiệu - Agribank - CN Trung Yên, HN<br /> 2. 0011-00404-0367 - Nguyễn Văn Hiệu - Vietcombank - CN Sở Giao dịch, HN<br /> 3. 711A-6202-9713 - Nguyễn Văn Hiệu - Vietinbank - CN Thanh Xuân, HN<br /> 4. 190-256-018-210-13 - Nguyễn Văn Hiệu - Techcombank, Hà Nội<br /> 5. 1231-0000-368-767 - Nguyễn Văn Hiệu - BIDV CN Quang Trung, Hà Nội', 'contactinfo' => '<div dir="rtl" style="text-align: left;"> <u style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"><strong>Văn Phòng</strong></u></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ: Số 157 Đặng Văn Ngữ, Phường Kim Liên, Hà Nội, Việt Nam<br /> Tel: (024) 3776 4930 <br /> Fax: (024) 3776 5908<br /> Email: thanhdatsurvey.JSC@gmail.com/ tracdiathanhdat@gmail.com<br /> Hotline: <strong>0913 051 734</strong><br /> <br /> <strong><u>C</u></strong><strong><u>ửa hàng</u></strong></span></span><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Số 145 Láng Hạ, Phường Đống Đa, Hà Nội</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0942 288 388</strong></span><br /> </div> <div style=""> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- Số 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style=""> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0949 322 456</strong></span></div> <div style=""> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><u>VPĐD tại Tp. Hồ Chí Minh</u></strong><br /> <br /> - 1/56 Nguyễn Thái Sơn, Phường Hạnh Thông, Hồ Chí Minh</span></span><br /> <img alt="" src="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAADUAAAAoCAYAAABerrI1AAAIK0lEQVRoBdWZi1fTRxbH8/esW3W77Wnrqnva7XH7dNk+7Lq7h/Io8jIEGiCGN9XKK0SBJITwy+uXH8kvFgUEUZ4iWI5Va7UVH1sf1VWrq+261W0tIt89d+L8GkJegJ6VOWfOZCYzc+9n7p07k4kK80z3H0ziyu1zOHF1DINnZew4th3Wg3rUDWVgc18iirrfQn7na9B2vIqCztdR2PUmK6lO7cU9b2NLXyIMw5mwjZeg/YtG7P+6HV9ePYhrty+A5p9vUsU7cHLqZ0x8ewi9E06Yxwqg352ATP/vkOFf8chz5o6V0HcnwDJWyOSd+vazOUHGhDp9/TCkIzVMyOMAiHdOgvQercWZG0dj2iEi1KFv9qJm8INHboV4IaL1qx1Kx5FLAxHhZkFduDWB+uGsJxImFHT7iAZXb5+fBTcDauCMF+TPoYMXWs/asQrZn6wGlQudK3S8uv1FjJ7rmAGmQLUfb1qQwHT5eWzwPosP2n7LNje5B/n/5e/PstW89p+LrKT6P/51DJ9fHsLI1+3Q7lzDxmXIzy9IPgUwnhgUheTQFYhVL+l5G77PDcjveAVJ7l/jfdevWNb4f48f7n3P549ZbhvMVMbSPMmeZXAcqkR571/mrNORy4NMnurGnctxD87asRKGoQwcvtSPqQf32QQlXQmKUgS2ECi+MGTN6ekH7AxsGNHE7bY57S/hx8k7UFG4jmUV/n3l3r/OWvnHBRUsiA50rkOssu+0BBWd/rE68u9pU966ey1YHiJB3f7xJs7dPIHjV0ZBx8PY+S6MX9yDL66M4OyNY7h59yqbJ9j9gi3FhdDK53e+GreOjQfyoKIrDFc6nvLAuV1cHiuDoZLFpcj2r8TW/uSYiuTufBkf7fs7dJ1vsH3Egagk9+OJFiEevXifyn1/g0qz8w9zGtT1ZQvzdy60uCsBydJypPuem9M8XAleUvRMlZ5GomuJAjWNadAxw/vEU+btWgOV2r86/kHyChgGNihQhy/1gYJHNGFa35+wpS0bNVIhtkhq6HzvRO2fLr/AoiotGkFZRvORIcd/v9zQ9ixUWd4XkCItjyqIK03uVd2XyoxEN2veHqn8UH4NH7epYXLUwdTQCLPNiGpJCwKNNIa3f9yfxG7rtjE9ksVlMfvTuLS2Z5Dsfgqq4/88oITkJHEpSPFwmXw9RVyKi99NoHog+p1Q710Ps1gHl8vFcmuzALPBAluTTWmzig0o86ZEvelrdr6EI5f6kSY9jfddS5DiWc5cnUolS4G2ZPEpxrHruAns8P3s4j5s9K9ijUmuJQiX9Z1rceLKKMp734u4atn+1TB6yuEQHHA5A0AEZqmzoKnaxHJwO/UjeLUceV/Tta3/tARdx+vK4gcHFf451fMbyEcNzIsY1P2pn7Fvwo1tQ1loHM6BaX+ukhuG1Wjar0H/KQmFXW9EBCLzN4pVsJlsTHlLrQVOhxNOpwtOwYmWRhvsLYJiqWajlfWzGq1oERuRI78cdW7bwSJUdL8LCkxl3e8ouWT3n1HUuRaO8TLcuhM4JpS7H49m4crJqXugqML9PVxJe4WsQspzqxCU3y/D4xEhCHa43W6lbqkPWM9S38zGNXg2R52fZNKv4nhSXFCxTvRc+Y9wuhyKFQSrnVnJJ/vQUN+AEm0pdOpNKMorRn2VAT6fF6IoQrDZlTG0IJu867BRfjEiHEXa0MM/HGRMqLHznRGF0OpRUKiS8phydsHB3I0UJAsZa43ISdVAt1EHnUbPwDSpGlRVboXP71OA2B50uVAr6VHmTYoqz7h/YziOGW1RoX66/1/QyR/O3XhblaSFRTQoe8lUY1bAdDmbQLlEW4KiD4tRpC2GPq8I+ZkFsFlt8HrbQO5H7kpuS0GjRtJGlUdyv7r26QyI0EpUqJ6T9pgCaiUdLKIRzdsDG58UdDlccDgcioUIhkE9BNNm5sNssjAoU00gKlLAMIsG1EgFMWXS9SpaighFT1TajldiCqCzxiAVM1cSmgXYbRQQXKD9VFVRBU2KBpty9QGovGLkpuaiTFeONm8b21fksq2WVrYQdBxUeNNiyiRrnbp+OCJXRKjxCz1xTU4CCuS1yv6g/eR0OiFJHmaJqspq6NQ6FGQVoCC7EB8Vb2YwBOVwOGeMK/UmgoIOd+1opWlUO3eoWLeGUIEGT2nAWlYB5lozLAYL3C43ZL8MQRBgabKgpcXGLChJEqzbrKwfnWu0ELSfQueMVqc3x0iRMKyl6IU02oThvqPDs0VsYlchfk6RK5LCBOG2uyGJItxkSbsTfC9RoKDjQOtbO2eZeyYcYa0VFmrXCcucBRCoRl4Dq7sRglWAveWXM4iCAIGaa8zK9YnCeKu5Fa2OFhT63pqXPAoYdJMPTWGhKnrXz0sIgWX7V7Fzy+EOuhI9jIx0qSXL8VwvlUAd43oUziuC24J/UHK4WVDffHd63kDBwuiSWv4wMjYJdWhsMMJkq4fRU4bKtvS4A0LwnOE+7/6qlbMo5Syo7pPCI4EKp8DjaKN/TkLTLKiqgdRFBUULdf2HyzO4ZkDRKyp1oht5ac+6h/ldlPY8eblsz3vQ7Q5EzJ6QKKhAURTpPeVCxZ712CA9E/UHGf9h9v8uU8VlKOtZx/64o6c0nhSoO/f+DWG8dFHAhC5mUVcC6J2RJwWq96Rjxpt46MAnvU6/3HlSoIRPSxallfhiG/rTOFPg4YVqw2dkpHno1Sbw78ViK8nTeFIsRe8Qg2e8ixJq695ETE1PcaZfLMVbRs5+wl5nMr3PQS2vfGJztm8F0004WIyfJu9y9Vn5P2E2W2r6o5rUAAAAAElFTkSuQmCC" style="height: 12px; width: 16px;" /><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> <strong>0904 925 936</strong></span></div> ', 'telephone' => '01659 014592', 'hotline' => '0913 051 734', 'email' => 'tracdiathanhdat@gmail.com', 'url' => '', 'meta_key' => 'Leica Geosystems, Máy RTK, máy định vị GPS, GNSS, vngeonet, máy laser, thước đo, Yamayo, máy toàn đạc điện tử, máy toàn đạc robotic, máy toàn đạc tự động, Leica, Sokkia, Nikon, Trimple, Nikon, Spectra, Topcon, ống nhòm, máy bộ đàm, thước đo Yamayo, Máy toàn đạc điện tử, Máy toàn đạc Leica, Máy toàn đạc Sokkia, máy toàn đạc Nikon, Máy toàn đạc Geomax, Máy toàn đạc Topcon, Máy toàn đạc Trimble, Máy thủy bình tự động, Máy thủy bình leica, Máy thủy bình sokkia, Máy thủy bình Nikon, Máy thủy bình Topcon, Máy thủy bình pentax, Máy thủy bình điện tử, Máy cân bằng laser, Máy kinh vĩ nikon, Máy kinh vĩ Topcon, Máy kinh vĩ sokkia, Máy kinh vĩ geomax, Máy cân bằng laser sabaru, Máy cân bằng laser sincon, Máy cân bằng laser fukuda, Máy cân bằng laser acuza, Máy đo khoảng cách laser leica, Máy đo khoảng cách laser sincon, Máy đo khoảng cách laser bosch, Máy định vị gps 2 tần, Máy định vị gps cầm tay, Máy đo sâu, Máy bộ đàm, Phụ kiện trắc địa, Máy định vị GPS RTK GNSS, Máy định vị GPS RTK Trimble, Máy định vị GPS RTK Sokkia, Máy định vị GPS RTK Sanding, Máy định vị GPS RTK CHC, Máy định vị GPS RTK Comnav, Máy định vị GPS RTK Efix, Máy định vị GPS RTK FOIF, Máy định vị GPS RTK Geomax, Máy định vị GPS RTK Topcon, Máy định vị GPS RTK Nikon, Máy định vị GPS RTK South, Máy định vị GPS RTK Ruide, Máy định vị GPS RTK Kolida, Máy định vị GPS RTK Leica, máy định vị điểm, đo đạc, khảo sát, bản đồ, RINEX, CORS, ', 'meta_des' => 'Chuyên cung cấp máy GNSS RTK, máy thủy bình, máy toàn đạc, máy laser, máy GPS cầm tay, UAV, ống nhòm (LEICA, TOPCON, NIKON, TRIMPLE, SOKKIA, DJI, PENTAX, GARMIN,...). Uy tín, chất lượng, giá tốt hàng đầu tại Việt Nam!', 'created' => '2012-06-05', 'modified' => '1783492910', 'youtube' => 'http://youtube.com', 'twitter' => 'https://twitter.com/', 'myspace' => 'https://myspace.com/', 'facebook' => 'https://www.facebook.com/thanhdatsurvey.jsc/', 'email2' => 'duycuong7640', 'skype' => 'hothihuyen.hn', 'yahoo' => 'duycuong7640', 'yahoo1' => 'duycuong7640', 'content' => 'Thanks for your interest in Vn Discoverytours. For a fast response, please submit this basic Quick Enquiry form below by clicking “Submit”, and we’ll get back to you by e-mail within 12 to 24 hours (in working days). For urgent booking, call us at +84 974 839 873', 'video' => '<iframe width="1280" height="720" src="https://www.youtube.com/embed/mR4kOuAkEtY" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>', 'slogan' => 'trung tâm sửa chữa và bảo hành máy giặt electrolux', 'slogan_eng' => '', 'printer' => '', 'googleplus' => '', 'bando' => '<p> <iframe allowfullscreen="" frameborder="0" height="410" src="https://www.google.com/maps/embed?pb=!1m18!1m12!1m3!1d1680.2372398112452!2d105.81212934716025!3d21.01437303922492!2m3!1f0!2f0!3f0!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ab63b645b665%3A0xa6797ac6008687bf!2zQ-G7rWEgSMOgbmcgVHLhuq9jIMSQ4buLYQ!5e0!3m2!1svi!2s!4v1449908805279" style="border:0" width="600"></iframe></p> ', 'gioithieu' => '<p style="text-align: center;"> <img alt="" src="/admin/webroot/upload/image/images/gioithieu.png" /></p> ', 'thongtincongty' => 'Sửa máy lạnh tại nhà Sửa máy lạnh tại HCM Sửa tủ lạnh Bơm ga máy lạnh ', 'trogiupkh' => 'Tai nghe Iphone Sua may tinh tai nha Máy Ozone Z755', 'dichvuft' => 'Sửa máy lạnh Bảo dưỡng máy lạnh Vệ sinh máy lạnh Lắp đặt máy lạnh', 'bb' => '', 'zing' => '', 'hotline2' => '0912 35 65 75', 'thelink' => '<script type='text/javascript'>window._sbzq||function(e){e._sbzq=[];var t=e._sbzq;t.push(["_setAccount",32506]);var n=e.location.protocol=="https:"?"https:":"http:";var r=document.createElement("script");r.type="text/javascript";r.async=true;r.src=n+"//static.subiz.com/public/js/loader.js";var i=document.getElementsByTagName("script")[0];i.parentNode.insertBefore(r,i)}(window);</script> <script> (function(i,s,o,g,r,a,m){i['GoogleAnalyticsObject']=r;i[r]=i[r]||function(){ (i[r].q=i[r].q||[]).push(arguments)},i[r].l=1*new Date();a=s.createElement(o), m=s.getElementsByTagName(o)[0];a.async=1;a.src=g;m.parentNode.insertBefore(a,m) })(window,document,'script','//www.google-analytics.com/analytics.js','ga'); ga('create', 'UA-72584674-1', 'auto'); ga('send', 'pageview'); </script> <!-- Global site tag (gtag.js) - Google Ads: 876059345 --> <script async src="https://www.googletagmanager.com/gtag/js?id=AW-876059345"></script> <script> window.dataLayer = window.dataLayer || []; function gtag(){dataLayer.push(arguments);} gtag('js', new Date()); gtag('config', 'AW-876059345'); </script> <script>!function(s,u,b,i,z){var o,t,r,y;s[i]||(s._sbzaccid=z,s[i]=function(){s[i].q.push(arguments)},s[i].q=[],s[i]("setAccount",z),r=["widget.subiz.net","storage.googleapis"+(t=".com"),"app.sbz.workers.dev",i+"a"+(o=function(k,t){var n=t<=6?5:o(k,t-1)+o(k,t-3);return k!==t?n:n.toString(32)})(20,20)+t,i+"b"+o(30,30)+t,i+"c"+o(40,40)+t],(y=function(k){var t,n;s._subiz_init_2094850928430||r[k]&&(t=u.createElement(b),n=u.getElementsByTagName(b)[0],t.async=1,t.src="https://"+r[k]+"/sbz/app.js?accid="+z,n.parentNode.insertBefore(t,n),setTimeout(y,2e3,k+1))})(0))}(window,document,"script","subiz","acqxaefflwedscstabut")</script>', 'theh1' => 'thanhdatsurvey.JSC', 'hanoi' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tphcm' => '<div> <strong>CÔNG TY CỔ PHẦN THƯƠNG MẠI HMH VIỆT NAM</strong></div> <div> <strong>Địa chỉ</strong> : Số 51 - Trần Duy Hưng, Trung Hòa, Cầu Giấy, Hà Nội</div> <div> <strong>Điện thoại </strong>: (04) 3641.7498 - <strong>Fax</strong>: (04) 3543.0479</div> <div> <strong>Email </strong>: info@ifes.vn</div> ', 'tt' => '', 'pp' => 'https://www.facebook.com/ruaxetudong.net', 'tphcm_eng' => '', 'hanoi_eng' => '', 'hotline_eng' => '', 'name_eng' => '', 'chinhsach' => null, 'bandohn' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'bandohaiphong' => '<iframe frameborder="0" height="450" src="https://www.google.com/maps/embed?pb=!1m14!1m8!1m3!1d3724.958946511035!2d105.8172709!3d20.9942827!3m2!1i1024!2i768!4f13.1!3m3!1m2!1s0x3135ac91e206c757%3A0xf0f7a088bc4c72a2!2zMTg2IEtoxrDGoW5nIFRydW5nLCBUaGFuaCBYdcOibiwgSMOgIE7hu5lpLCBWaeG7h3QgTmFt!5e0!3m2!1svi!2s!4v1419913280809" style="border:0" width="600"></iframe>', 'gt' => '<p data-pm-slice="1 1 []" style="text-align: justify;"> <span style="font-size:12px;">Là đơn vị chuyên nhập khẩu, phân phối và chuyển giao công nghệ các thiết bị đo đạc, trắc địa như: <a href="https://tracdiathanhdat.vn/may-rtk"><span style="color:#ffffff;">máy GPS RTK</span></a>, <a href="https://tracdiathanhdat.vn/may-toan-dac-dien-tu"><span style="color:#ffffff;">máy toàn đạc điện tử</span></a><span style="color:#ffffff;">,</span><a href="https://tracdiathanhdat.vn/may-thuy-binh-tu-dong"><span style="color:#ffffff;"> máy thủy bình</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-kinh-vi-dien-tu"><span style="color:#ffffff;">máy kinh vĩ</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-dinh-vi-gps-cam-tay"><span style="color:#ffffff;">máy định vị GPS cầm tay</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thuy-binh-laser"><span style="color:#ffffff;">máy thủy bình laser</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-thong-tang"><span style="color:#ffffff;">máy thông tầng</span></a><span style="color:#ffffff;">, </span><a href="https://tracdiathanhdat.vn/may-bo-dam"><span style="color:#ffffff;">máy bộ đàm</span></a><span style="color:#ffffff;">,</span><span style="color:#ffffff;"> </span><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">laser Scanne</span></a><a href="https://tracdiathanhdat.vn/laser-scanner-layout-navigator"><span style="color:#ffffff;">r</span></a> và <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia"><span style="color:#ffffff;">phụ kiện trắc địa</span></a>,... </span>đến từ nhiều thương hiệu uy tín như: LEICA, TOPCON, NIKON, PENTAX, SOKKIA, TRIMBLE, SPECTRA, GEOMAX, GARMIN...<br /> <br /> Với hơn 20 năm kinh nghiệm, Trắc Địa Thành Đạt cam kết mang đến sản phẩm chính hãng, giá cả hợp lý, hỗ trợ tư vấn kỹ thuật, chuyển giao công nghệ và dịch vụ hậu mãi tận tâm, luôn đồng hành cùng Quý khách hàng trong mọi công trình khảo sát, đo đạc và xây dựng!<br /> </p> <span style="text-align: justify; color: rgb(255, 255, 255);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"><strong style="font-family: tahoma, geneva, sans-serif;">Hỗ trợ 24/7:</strong></span></span><span style="text-align: justify; color: rgb(0, 0, 128);"><span style="font-family: "comic sans ms", cursive; font-size: 14px;"> </span></span><span style="text-align: justify; color: rgb(255, 153, 51);"><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:16px;"><strong>0942 288 388/0949 322 456</strong> (Zalo) </span></span></span>', 'gt_eng' => '' ) $tin_ft = array( (int) 0 => array( 'Post' => array( 'id' => '588', 'name' => 'Hướng dẫn mua hàng', 'code' => null, 'alias' => 'huong-dan-mua-hang', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p> <span style="color:#000000;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> </span></span><span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></p> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="line-height: 107%;"><!--[if !supportLineBreakNewLine]--><!--[endif]--></span></span></span> <p> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="color:#000000;">Quý khách có thể mua hàng theo những cách sau:</span></span></span><br /> </p> <p> <span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>1. Cách 1: </strong>Đặt hàng trực tiếp tại mục ĐẶT HÀNG (Thêm vào giỏ hàng) trên website: </span></span><span style="font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;"><a href="https://maytracdiasaoviet.vn/" target="_blank"><span style="color:#000000;">https://tracdiathanhdat.vn/</span></a></span></span><span style="color: rgb(0, 0, 0); font-size: 14px;"><span style="font-family:tahoma,geneva,sans-serif;">.</span></span></p> <p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngay sau khi tiếp nhận thông tin đặt hàng, nhân viên kinh doanh công ty sẽ gọi điện cho quý khách để xác nhận đơn hàng và tiến hành giao hàng cho quý khách ngay trong ngày.</span></span></span></p> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>2. Cách 2: </strong>Đặt hàng trực tiếp qua số hotline của công ty <br /> <br /> – Tại trụ sở Hà Nội: <strong>0913 051 734 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">– Tại VPGD Hồ Chí Minh:<strong> 0904 925 936 </strong></span></span></span><span style="color: rgb(0, 0, 0); font-family: tahoma, geneva, sans-serif; font-size: 14px;">(Zalo/Call)</span><br /> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong>3. Cách 3: </strong>Quý khách mua hàng trực tiếp tại địa chỉ sau:<br /> <br /> <strong>CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></span></span></span><br /> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 145 Láng Hạ, Phường Láng Hạ, Hà Nội</span><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">- 5/161 Nguyễn Tuân, Phường Thanh Xuân, Hà Nội</span></div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> </div> <div style="margin: 0px; padding: 0px; color: rgb(0, 0, 0); font-family: arial; font-size: 13px; text-align: justify;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Rất mong được hợp tác với Quý khách hàng trên cả nước.<br /> <br /> Trân trọng!</span></span></span></div> ', 'images' => '202104071220058398ebc1b9cf669cf602eb8040be387a.jpg', 'images_multi' => '', 'pos' => '1', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Máy trắc địa chính hãng | RTK GNSS, máy toàn đạc, máy thủy bình – Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy RTK GNSS, máy toàn đạc, máy thủy bình, GPS cầm tay chính hãng. Tư vấn kỹ thuật – giao hàng toàn quốc. Trắc địa Thành Đạt – 0913 051 734', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '4244', 'slug' => 'huong-dan-mua-hang', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '143', 'rght' => '144', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 1 => array( 'Post' => array( 'id' => '586', 'name' => 'Chính sách thanh toán', 'code' => null, 'alias' => 'chinh-sach-thanh-toan', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;"><b><span style="font-size: 10.5pt; line-height: 107%; font-family: Verdana, sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></b><br /> <br /> <span style="font-size: 10.5pt; line-height: 107%; font-family: Tahoma, sans-serif;"> <!--[if !supportLineBreakNewLine]--><!--[endif]--></span> </span><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px;">Chúng tôi c</span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">hấp nhận các hình thức thanh toán bằng tiền mặt, chuyển khoản theo đúng quy định pháp luật. </span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <img alt="" src="/admin/webroot/upload/image/images/Thiết kế chưa có tên (22).png" style="width: 320px; height: 183px;" /></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Quý khách có thể chọn các phương thức thanh toán sau đây:</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">I. Thanh toán trực tiếp tại cửa hàng<br /> <br /> II. Thanh toán qua hình thức chuyển khoản</span></strong><br /> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Thông tin tài khoản:</span></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <strong style="color: rgb(0, 0, 0); margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"><em>Chủ tài khoản</em>: CÔNG TY CP CÔNG NGHỆ VÀ THƯƠNG MẠI THÀNH ĐẠT</strong></p> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><em style="margin: 0px; padding: 0px;"><strong>Số tài khoản</strong></em><em style="margin: 0px; padding: 0px;">: <strong>0611001648635</strong> tại Ngân hàng TMCP Ngoại thương Việt Nam, chi nhánh Ba Đình<br /> <br /> <strong>Nội dung chuyển khoản</strong>: Tên công ty - Thông tin sản phẩm đã mua – Số điện thoại người chuyển tiền</em></span></span></span><br /> <br /> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66); font-family: Roboto, sans-serif; font-size: 16px;"> <span style="color:#000000;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;">Sau khi chuyển khoản hãy thông báo lại cho chúng tôi để chúng tôi kiểm tra và xác nhận lại cho Quý khách.</span></span><br /> <br /> <strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">III. Thanh toán khi nhân viên đến giao nhận hàng</span></strong></span></p> <p style="margin: 0px 0px 1.3em; padding: 0px; text-align: justify; box-sizing: border-box; color: rgb(66, 66, 66);"> <span style="color:#000000;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">Quý khách hàng thanh toán trực tiếp bằng tiền mặt cho nhân viên giao hàng của chúng tôi ngay khi kiểm tra và nhận hàng.<br /> <br /> Mọi phản hồi và thắc mắc về việc thanh toán, Quý khách liên hệ <strong>0942 288 388</strong> để được tư vấn.</span></font><br /> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span></span></p> ', 'images' => '20210407122232bf3e6d52a68ca60f97fc6048b14e4acc.jpg', 'images_multi' => '', 'pos' => '2', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3881', 'slug' => 'chinh-sach-thanh-toan', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '139', 'rght' => '140', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 2 => array( 'Post' => array( 'id' => '587', 'name' => 'Chính sách vận chuyển', 'code' => null, 'alias' => 'chinh-sach-van-chuyen', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><strong><span style="font-family:verdana,geneva,sans-serif;">Cảm ơn Quý khách đã tin tưởng lựa chọn sản phẩm và dịch vụ vủa chúng tôi!</span></strong><br /> <br /> Chúng tôi hỗ trợ giao hàng toàn quốc cho Quý khách mua hàng tại hệ thống cửa hàng của chúng tôi.</span></span><br /> </div> <div> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;">Sau khi nhận được thông tin đặt hàng chúng tôi sẽ lập tức xử lý đơn hàng và phản hồi lại thông tin cho khách hàng về việc thanh toán và giao nhận.<br /> <br /> <strong>> Thời gian giao hàng </strong><br /> <br /> - Trong vòng 24 giờ nếu địa điểm giao hàng <b style="color: rgb(74, 74, 74); box-sizing: border-box;">≤ 20 km</b> tính từ cửa hàng của chúng tôi.</span></span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Trong vòng 1-2 ngày nếu địa điểm giao hàng nằm trong phạm vi <b style="box-sizing: border-box">50 - 100 km</b> </span></span><span style="font-family: Arial, sans-serif;"><o:p></o:p></span><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">tính từ cửa hàng của chúng tôi.<br /> <br /> - Trong vòng 3-5 ngày</span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> nếu địa điểm giao hàng từ <strong>20</strong></span><b style="font-family: tahoma, geneva, sans-serif; font-size: 14px; box-sizing: border-box;">0 km</b><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;"> trở lên </span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">tính từ cửa hàng của chúng tôi.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Trước khi vận chuyển, bộ phận giao nhận sẽ liên lạc với Quý khách hàng để xác nhận khoảng thời gian và địa điểm giao hàng cụ thể.</span></p> <p style="margin-top: 0in; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; box-sizing: border-box; margin-bottom: 1rem;"> <strong style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">> Phí vận chuyển</strong><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> sẽ được tính theo từng giá trị đơn hàng và được thoả thuận giữa hai bên ngay trước khi giao hàng. </span></p> <p style="margin: 0in 0in 7.5pt; padding: 0px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify; background-image: initial; background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial;"> <span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><span style="margin: 0px; padding: 0px; font-size: 14px;"><span style="margin: 0px; padding: 0px;">Mọi thắc mắc liên quan đến việc giao hàng, Quý khách hàng liên hệ số điện thoại <strong>0942 288 388</strong> để được giải đáp và giải quyết kịp thời.<br /> <br /> Trân trọng!</span></span></span></p> </div> ', 'images' => '20210407122135505ddef64809ce7ee5f9db7cfdfd3e2e.jpg', 'images_multi' => '', 'pos' => '3', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3923', 'slug' => 'chinh-sach-van-chuyen', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '141', 'rght' => '142', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 3 => array( 'Post' => array( 'id' => '585', 'name' => 'Chính sách đổi trả', 'code' => null, 'alias' => 'chinh-sach-doi-tra', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Chúng tôi hỗ trợ đổi trả sản phẩm trong vòng 07 ngày nếu lỗi phát sinh do nhà sản xuất.<br /> <br /> Trong thời gian đổi trả, Công ty CP Công nghệ và Thương mại Thành Đạt sẽ hỗ trợ cung cấp máy móc thay thế kịp thời để công việc khảo sát, đo đạc của Quý khách không bị gián đoạn. Chi phí vận chuyển cho việc đổi trả do hai bên tự thoả thuận.</span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br /> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">> Điều kiện đổi trả: </span></span></strong></span><br /> <ul> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm phải còn nguyên tem mác.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm bị lỗi do nhà sản xuất.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Sản phẩm không đúng như đơn đặt hàng.</span></span></span></li> <li style="box-sizing: border-box;"> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Số lần đổi trả cho 1 sản phẩm là 1 lần</span></span></span></li> </ul> <br /> <div style="text-align: start;"> <span style="color:#000000;"><strong><span style="text-align: justify;"><font face="tahoma, geneva, sans-serif"><span style="font-size: 14px;">> </span></font><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px;">Việc đổi trả sẽ không được chấp nhận nếu:</span> <span style="font-size: 14px; font-family: tahoma, geneva, sans-serif;"> </span></span></strong></span></div> <ul> <li> <span style="color:#000000;"><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Trong quá trình sử dụng sản phẩm Quý khách không tuân thủ các chỉ dẫn của Nhà sản xuất.</span></span></li> <li> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="text-align: justify;">S</span>ản phẩm bị trầy xước, không nguyên vẹn</span></span></span></li> </ul> <br /> <span style="color:#000000;"><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Ngoài ra, chúng tôi cũng hỗ trợ đổi trả sản phẩm vì lý do chủ quan của Quý khách hàng ( muốn đổi sang sản phẩm cùng chủng loại nhưng khác về màu sắc, hãng sản xuất hay thông số kỹ thuật). Chi phí cho việc đổi trả này do Quý khách hàng chịu.</span></span><br /> <br /> <span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"><img alt="" src="https://tracdiathanhdat.vn/admin/webroot/upload/image/images/lien-he.jpg" style="margin: 0px; padding: 8px 0px; height: 36px; max-width: 100%; vertical-align: middle; border: 0px; opacity: 1; font-size: 13px; width: 38px;" /><span style="margin: 0px; padding: 0px; font-size: 13px;"> </span></strong></span></span><span style="margin: 0px; padding: 0px; font-family: arial; text-align: justify; font-size: 14px;"><span style="margin: 0px; padding: 0px; font-family: tahoma, geneva, sans-serif;"><strong style="margin: 0px; padding: 0px;"> </strong></span></span><span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Liên hệ hotline <strong>0913 051 734</strong> để được tư vấn đổi trả theo đúng qui định.</span></span>', 'images' => '202104071223177d9b7f6e319f9fa90078c7c61ed9bd19.jpg', 'images_multi' => '', 'pos' => '4', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3915', 'slug' => 'chinh-sach-doi-tra', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '137', 'rght' => '138', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 4 => array( 'Post' => array( 'id' => '583', 'name' => 'Chính sách bảo hành', 'code' => null, 'alias' => 'chinh-sach-bao-hanh', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"><span style="color: rgb(66, 66, 66); text-align: justify;">Tất cả các sản phẩm mua tại hệ thống cửa hàng của chúng tôi đều được bảo hành chính hãng theo quy định của nhà sản xuất. </span><br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <br style="margin: 0px; padding: 0px; color: rgb(66, 66, 66); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;" /> <span style="color: rgb(66, 66, 66); text-align: justify;">Chúng tôi hỗ trợ kỹ thuật 24/7 qua số hotline <strong>0913 051 734</strong> trong suốt quá trình Quý khách sử dụng sản phẩm.</span></span></span></div> <div> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">1. Sản phẩm được bảo hành miễn phí: </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm sẽ được bảo hành miễn phí nếu sản phẩm đó còn thời hạn bảo hành (được tính kể từ ngày mua hàng).</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Thời hạn bảo hành được ghi trên Tem Bảo Hành và theo quy định của từng Nhà sản xuất đối với tất cả các sự cố về mặt kỹ thuật.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Có Tem bảo hành trên sản phẩm.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Khi sản phẩm có sự cố kĩ thuật chúng tôi sẽ trực tiếp khắc phục sự cố tại cửa hàng hoặc thay mặt khách hàng mang sản phẩm tới Trung Tâm Bảo Hành của hãng.</span></span></li> </ul> <br /> <strong><span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">2. Những trường hợp không được bảo hành (sửa chữa có tính phí): </span></span></strong><br /> <br /> <ul> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm đã quá thời hạn bảo hành hoặc không có Tem bảo hành trên máy.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hư hỏng do tác động cơ học làm rơi, vỡ, va đập, trầy xước, móp méo, ẩm ướt, hoen rỉ, chảy nước hoặc do hỏa hoạn, thiên tai gây nên.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Sản phẩm bị hỏng do sử dụng không đúng cách, sử dụng sai điện áp quy định.</span></span></li> <li> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;">Tự ý tháo dỡ, sửa chữa sản phẩm</span></span></li> </ul> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Trân trọng!</span></span><br /> <span style="font-family:tahoma,geneva,sans-serif;"><span style="font-size:14px;"> </span></span></div> ', 'images' => '20210407123801c4049edabae0c54e2347c82e21413ec3.jpg', 'images_multi' => '', 'pos' => '5', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-11', 'status' => '1', 'view' => '3646', 'slug' => 'chinh-sach-bao-hanh', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '133', 'rght' => '134', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ), (int) 5 => array( 'Post' => array( 'id' => '584', 'name' => 'Chính sách bảo mật thông tin', 'code' => null, 'alias' => 'chinh-sach-bao-mat-thong-tin', 'cat_id' => '4', 'price' => '0', 'type' => 'new', 'shortdes' => '', 'content' => '<div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">1. Mục đích thu nhập thông tin cá nhân</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51);">Thông tin cá nhân mà chúng tôi thu thập bao gồm: họ tên, địa chỉ giao hàng, địa chỉ email, số điện thoại cố định, số điện thoại di động, cookies.</span></p> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Đối với các giao dịch thanh toán qua cổng thanh toán trực tuyến, Chúng tôi không lưu trữ thông tin số tài khoản, số thẻ ngân hàng của khách hàng, những thông tin này sẽ được cổng thanh toán lưu trữ để phục vụ việc đối soát giao dịch.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân khách hàng sẽ được sử dụng cho một hoặc tất cả các mục đích sau đây:</span></span></span></span> <ul style="margin: 0px; padding: 0px 0px 0px 15px;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Giao hàng cho quý khách đã mua hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông báo về việc giao hàng và hỗ trợ khách hàng</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Cung cấp thông tin liên quan đến sản phẩm</span></span></span></span></li> </ul> </li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoài ra, chúng tôi sẽ sử dụng thông tin của quý khách cung cấp để hỗ trợ quản lý tài khoản khách hàng (nếu có); xác nhận và thực hiện các giao dịch tài chính liên quan đến các khoản thanh toán trực tuyến của quý khách;</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi không được phép thu nhập thông tin nếu khách hàng không tự nguyện, cũng không sử dụng phương thức thu thập thông tin khách hàng bằng các hình thức bất hợp pháp.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">2. Phạm vi sử dụng thông tin</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Thông tin cá nhân thu thập được sẽ chỉ được sử dụng trong nội bộ công ty.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể chia sẻ tên và địa chỉ của quý khách cho dịch vụ chuyển phát nhanh có uy tín để giao hàng cho quý khách theo cam kết.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">3. Thời gian lưu trữ thông tin</span></span></span></span></h2> <p style="text-align: justify;"> <br /> <span style="font-family: tahoma, geneva, sans-serif; font-size: 14px; color: rgb(51, 51, 51); text-align: justify;">Thông tin khách hàng được lưu trữ nội bộ cho đến khi có yêu cầu xóa thông tin từ phía khách hàng.</span></p> <div style="margin: 0px; padding: 0px; line-height: 20px;"> <div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">4. Những người hoặc tổ chức có thể được tiếp cận với thông tin </span></span></h2> <br /> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Đối tượng được tiếp cận với thông tin cá nhân của khách hàng thuộc một trong những trường hợp sau:</span></span><br /> </div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Nhân viên của Công ty Cổ phần Công nghệ và thương mại Thành Đạt</span></span></div> <div style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Các đối tác có ký hợp đồng thực hiện 1 phần dịch vụ của Công ty. Các đối tác này sẽ nhận được những thông tin theo thỏa thuận hợp đồng (có thể 1 phần hoặc toàn bộ thông tin tuy theo điều khoản hợp đồng) để tiến hành hỗ trợ người dùng sử dụng dịch vụ do Công ty cung cấp.</span></span></div> <div style="text-align: justify;"> </div> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">5. Địa chỉ của đơn vị thu thập và quản lý thông tin</span></span></h2> <div style="text-align: justify;"> <em><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">(bao gồm cách thức liên lạc để người tiêu dùng có thể hỏi về hoạt động thu thập, xử lý thông tin liên quan đến cá nhân mình)</span></span></em></div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Địa chỉ của đơn vị thu thập và quản lý thông tin:</span></span><br /> </div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Công ty Cổ phần Công nghệ và thương mại Thành Đạt </span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Địa chỉ: số 157 phố Đặng Văn Ngữ, P. Phương Liên, Q. Đống Đa, Tp. Hà Nội</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Điện thoại: 0243 7764930</span></span></strong></div> <div style="text-align: justify;"> <strong><span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">- Email: tracdiathanhdat@gmail.com<span style="white-space: pre;"> </span></span></span></strong></div> </div> </div> <p style="text-align: justify;"> <br /> <span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;">Người dùng có thể gọi điện tới tổng đài hỗ trợ và chăm sóc khách hàng </span><strong style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify; margin: 0px; padding: 0px;">0949 322 456</strong><span style="color: rgb(51, 51, 51); font-family: tahoma, geneva, sans-serif; font-size: 14px; text-align: justify;"> để điều chỉnh hoặc xóa đi dữ liệu cá nhân của mình.</span><br /> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">6. Cam kết bảo mật thông tin cá nhân khách hàng</span></span></span></span></h2> <br /> <ul style="margin: 0px; padding: 0px 0px 0px 15px; color: rgb(51, 51, 51); font-family: arial; font-size: 13px; text-align: justify;"> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Không bán, chia sẻ hay trao đổi thông tin cá nhân của khách hàng thu thập trên trang web cho một bên thứ ba nào khác.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Ngoại trừ các trường hợp về sử dụng thông tin cá nhân như đã nêu trong chính sách này,chúng tôi cam kết không tiết lộ thông tin cá nhân của bạn ra ngoài. Trong một số trường hợp, chúng tôi có thể thuê một đơn vị độc lập để tiến hành các dự án nghiên cứu thị trường và khi đó thông tin của bạn sẽ được cung cấp cho đơn vị này để tiến hành dự án. Bên thứ ba này sẽ bị ràng buộc bởi một thỏa thuận về bảo mật mà theo đó họ chỉ được phép sử dụng những thông tin được cung cấp cho mục đích hoàn thành dự án.</span></span></span></span></li> <li style="margin: 0px; padding: 0px; line-height: 20px;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px;"><span style="margin: 0px; padding: 0px;">Chúng tôi có thể tiết lộ hoặc cung cấp thông tin cá nhân của bạn trong các trường hợp thật sự cần thiết như sau: (a) khi có yêu cầu của các cơ quan pháp luật; (b) trong trường hợp mà chúng tôi tin rằng điều đó sẽ giúp chúng tôi bảo vệ quyền lợi chính đáng của mình trước pháp luật.</span></span></span></span></li> </ul> <p style="text-align: justify;"> </p> <h2 style="text-align: justify;"> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">7. Thay đổi về chính sách</span></span></span></span></h2> <p style="text-align: justify;"> <br style="margin: 0px; padding: 0px;" /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;"><span style="margin: 0px; padding: 0px; color: rgb(51, 51, 51); text-align: justify;"><span style="margin: 0px; padding: 0px;">Nội dung của “Chính sách bảo mật” này có thể thay đổi để phù hợp với các nhu cầu của Công Ty CP Công nghệ và Thương Mại Thành Đạt cũng như nhu cầu và sự phản hồi từ khách hàng (nếu có). </span></span></span></span></p> </div> <div style="text-align: justify;"> <br /> <span style="font-size:14px;"><span style="font-family:tahoma,geneva,sans-serif;">Chúng tôi hiểu rằng quyền lợi của bạn trong việc bảo vệ thông tin cá nhân cũng chính là trách nhiệm của chúng tôi nên trong bất kỳ trường hợp có thắc mắc, góp ý nào liên quan đến chính sách bảo mật, việc thông tin cá nhân bị sử dụng sai mục đích vui lòng liên hệ qua số điện thoại <strong>0949 322 456</strong> hoặc gửi phản hồi về địa chỉ email: <em><strong>tracdiathanhdat@gmail.com.</strong></em><br /> <br /> Trân trọng!</span></span></div> ', 'images' => '202104071236589b665b2accf17da9077cea4c5dad8e94.jpg', 'images_multi' => '', 'pos' => '6', 'new' => '0', 'hot' => '1', 'saleoff' => null, 'title_seo' => 'Trắc địa Thành Đạt', 'meta_key' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'meta_des' => 'Chuyên cung cấp máy định vị vệ tinh GPS RTK, máy thủy bình, máy toàn đạc điện tử, UAV, ống nhòm, máy định vị GPS cầm tay, ... chính hãng, uy tín, giá tốt hàng đầu tại Việt Nam! Hotline: 0913051734!', 'created' => '2021-04-07', 'modified' => '2026-07-12', 'status' => '1', 'view' => '3920', 'slug' => 'chinh-sach-bao-mat-thong-tin', 'name_eng' => '', 'shortdes_eng' => '', 'content_eng' => '', 'phut' => null, 'shortdes_tq' => null, 'content_tq' => null, 'name_tq' => null, 'nguoilon' => null, 'treem' => null, 'truso' => null, 'don' => null, 'doi' => null, 'lon' => null, 'tour' => null, 'tourtrongnuoc' => null, 'tournuocngoai' => null, 'noiden' => null, 'ngaydi' => null, 'thangdi' => null, 'namdi' => null, 'ngaykhoihanh' => null, 'thoigiandi' => null, 'ngaykhoihanh_eng' => null, 'thoigiandi_eng' => null, 'videoyou' => null, 'nt' => null, 'duration' => null, 'duration_eng' => null, 'twodaypro' => null, 'twodaypro_eng' => null, 'threedaypro' => null, 'threedaypro_eng' => null, 'photo' => null, 'lft' => '135', 'rght' => '136', 'vat' => null, 'hangsx' => null, 'baohanh' => null, 'tinhtrang' => '1', 'tailieu' => null, 'tag' => null ), 'Catproduct' => array( 'id' => '4', 'name' => 'Chính sách bán hàng', 'parent_id' => null, 'alias' => 'chinh-sach-ban-hang', 'images' => '', 'lft' => '47', 'rght' => '48', 'pos' => '3', 'status' => '0', 'title_seo' => 'Trắc địa Thành Đạt - nơi cung cấp các loại máy móc ngành đo đạc', 'meta_key' => 'Máy toàn đạc, máy thủy chuẩn, máy kinh vĩ, máy laser, máy GPS, máy RTK,...', 'meta_des' => 'Trắc địa Thành Đạt chuyên cung cấp các máy toàn đạc, máy GNSS RTK, máy thủy bình, UAV, máy kinh vĩ, phụ kiện trắc địathiết bị máy trắc địa chất lượng cao, giá tốt nhất, hỗ trợ tư vấn 24/7, chuyển giao công nghệ tận chân công trình!', 'created' => '2015-12-02', 'modified' => '2025-10-29', 'slug' => 'chinh-sach-ban-hang-1', 'cate' => '4', 'link' => 'dich-vu', 'name_eng' => 'Sales Policy', 'name_tq' => '', 'type' => 'new', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) ) $slideshow = array( (int) 0 => array( 'Slideshow' => array( 'id' => '1158', 'name' => '', 'images' => '202607021457295d6b626c7966fea8ed15b90188f75e84.png', 'created' => '2026-07-02 14:57:29', 'modified' => '2026-07-02 14:57:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 1 => array( 'Slideshow' => array( 'id' => '1157', 'name' => '', 'images' => '20260630144106967d7220891508e0bc589157b72a4a6f.png', 'created' => '2026-06-30 14:41:06', 'modified' => '2026-06-30 14:41:06', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 2 => array( 'Slideshow' => array( 'id' => '1156', 'name' => '', 'images' => '20260627100900c4525d4b0ad85bb7ed6e5f31fbe008ce.png', 'created' => '2026-06-27 10:09:00', 'modified' => '2026-06-27 10:09:00', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 3 => array( 'Slideshow' => array( 'id' => '1153', 'name' => '', 'images' => '2026060910315463c4488ef0eebcd97a80c7be838ec857.png', 'created' => '2026-06-09 10:31:54', 'modified' => '2026-06-09 10:31:54', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 4 => array( 'Slideshow' => array( 'id' => '1151', 'name' => '', 'images' => '20260505105747cef035cfde3d3e4fc486dcc70906dab9.png', 'created' => '2026-05-05 10:57:47', 'modified' => '2026-05-05 10:57:47', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 5 => array( 'Slideshow' => array( 'id' => '1147', 'name' => '', 'images' => '20260504151401463305739b212edcd50d4df28ea21663.png', 'created' => '2026-05-04 15:14:01', 'modified' => '2026-05-04 15:14:01', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 6 => array( 'Slideshow' => array( 'id' => '1111', 'name' => '', 'images' => '2025091214412921cbc3cbc42d3d64fe4364ad8b7a9b7e.png', 'created' => '2025-09-12 14:41:29', 'modified' => '2025-09-12 14:41:29', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 7 => array( 'Slideshow' => array( 'id' => '1099', 'name' => '', 'images' => '20250707100715baf5ecd84c6a8766519b98f66eec1511.png', 'created' => '2025-07-07 10:07:15', 'modified' => '2025-07-07 10:07:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 8 => array( 'Slideshow' => array( 'id' => '1096', 'name' => '', 'images' => '202504251616158fbd912c821051db2e9e1ebe215c4da4.png', 'created' => '2025-04-25 16:16:15', 'modified' => '2025-04-25 16:16:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 9 => array( 'Slideshow' => array( 'id' => '1055', 'name' => '', 'images' => '202502071107533894de97e081b06e5749a83e6bed2399.png', 'created' => '2025-02-07 11:07:53', 'modified' => '2025-02-07 11:07:53', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 10 => array( 'Slideshow' => array( 'id' => '1008', 'name' => '', 'images' => '20240822084848c3089726a8fff539a5f1adcaaca9cd73.png', 'created' => '2024-08-22 08:48:48', 'modified' => '2024-08-22 08:48:48', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 11 => array( 'Slideshow' => array( 'id' => '961', 'name' => '', 'images' => '202403121029063cfd7328162ff668a881f7e275a1a01d.png', 'created' => '2024-03-12 10:29:08', 'modified' => '2024-03-12 10:29:08', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 12 => array( 'Slideshow' => array( 'id' => '850', 'name' => '', 'images' => '20230605160932d4a880ffcab96141d7a3538bf17255de.png', 'created' => '2023-06-05 16:09:33', 'modified' => '2023-12-25 09:27:46', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 13 => array( 'Slideshow' => array( 'id' => '817', 'name' => '', 'images' => '20230306160629b7490cbbbd5cfd081d8ec1930914a677.png', 'created' => '2023-03-06 16:06:29', 'modified' => '2025-12-23 09:03:28', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ), (int) 14 => array( 'Slideshow' => array( 'id' => '617', 'name' => '', 'images' => '20220713143712ec1e28dc996e7d39d7535a730ead176e.png', 'created' => '2022-07-13 14:37:12', 'modified' => '2024-12-02 16:11:15', 'status' => '1', 'pos' => '0', 'type' => 'intro', 'link' => '', 'content' => '', 'shortdes' => '', 'content_eng' => '', 'shortdes_eng' => '', 'name_eng' => '', 'name_tq' => '', 'shortdes_tq' => '', 'content_tq' => '' ) ) ) $adv_khuyenmai = array( 'Advertisement' => array( 'id' => '104', 'name' => null, 'link' => '', 'images' => '20240116150522bcaad45dcf4ad3e57d8f1c22266c69c8.png', 'display' => '5', 'created' => '2024-01-16', 'modified' => '2024-06-21', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '121', 'rght' => '122' ) ) $doitac = array( (int) 0 => array( 'Advertisement' => array( 'id' => '36', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/bosch', 'images' => '20151223081939be7f9ca66f2fb4e760fb991d89d74002.png', 'display' => '3', 'created' => '2015-12-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '33', 'rght' => '34' ) ), (int) 1 => array( 'Advertisement' => array( 'id' => '33', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/pentax', 'images' => '20151216094854d7903c4f5ae6da9780bc88cbb048d417.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '27', 'rght' => '28' ) ), (int) 2 => array( 'Advertisement' => array( 'id' => '16', 'name' => null, 'link' => 'http://tracdiathanhdat.vn/topcon', 'images' => '2015121609180430293457191c29e0d0d7a715d26041bd.png', 'display' => '3', 'created' => '2015-12-10', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '7', 'rght' => '8' ) ), (int) 3 => array( 'Advertisement' => array( 'id' => '27', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/trimple', 'images' => '2015121609470060450f77189189cce8edb27ef59c46d2.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '15', 'rght' => '16' ) ), (int) 4 => array( 'Advertisement' => array( 'id' => '28', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20151216094709d0c1b1d5ffcc17a598904261de69c485.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '17', 'rght' => '18' ) ), (int) 5 => array( 'Advertisement' => array( 'id' => '29', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/kenwood', 'images' => '201512160947288286f4b931bdbc0e64dfd484fc6c12e5.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '19', 'rght' => '20' ) ), (int) 6 => array( 'Advertisement' => array( 'id' => '30', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/nikon', 'images' => '202210171542300b1b7918f461a4dd8d877236543412d8.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '21', 'rght' => '22' ) ), (int) 7 => array( 'Advertisement' => array( 'id' => '34', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sincon', 'images' => '20151216095020f699fb43b225af9cb76ffe022e057faf.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '29', 'rght' => '30' ) ), (int) 8 => array( 'Advertisement' => array( 'id' => '31', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/garmin', 'images' => '201512160948147d3b76212a8ebdd03d45fc49a95a9868.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '23', 'rght' => '24' ) ), (int) 9 => array( 'Advertisement' => array( 'id' => '26', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/leica', 'images' => '20151216094654c3a83e015935188821aa9ee65e6b322f.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '13', 'rght' => '14' ) ), (int) 10 => array( 'Advertisement' => array( 'id' => '25', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/sokkia', 'images' => '2015121609464772166f729226cebe52ae986c2699c3a1.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '11', 'rght' => '12' ) ), (int) 11 => array( 'Advertisement' => array( 'id' => '24', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/foif', 'images' => '2015121609482733afba0b93b9383e6ea26a08124e8a76.png', 'display' => '3', 'created' => '2015-12-16', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '9', 'rght' => '10' ) ), (int) 12 => array( 'Advertisement' => array( 'id' => '54', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424094203a24f4d5a812351010a6355d888b944ec.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '57', 'rght' => '58' ) ), (int) 13 => array( 'Advertisement' => array( 'id' => '55', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '2021042409421996a13aed03c03b49b7d965db5dbcfdd6.png', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '59', 'rght' => '60' ) ), (int) 14 => array( 'Advertisement' => array( 'id' => '56', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/motorola', 'images' => '20220805103835e45b76131731a737df5e8dec49916375.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '61', 'rght' => '62' ) ), (int) 15 => array( 'Advertisement' => array( 'id' => '57', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/yamayo', 'images' => '20250304144532ee8e939d0c9e884e1a50ad352b272730.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2025-03-04', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '63', 'rght' => '64' ) ), (int) 16 => array( 'Advertisement' => array( 'id' => '58', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '20210424100013ce6e6d048914eccdc312d53e64e566b7.jpg', 'display' => '3', 'created' => '2021-04-24', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '65', 'rght' => '66' ) ), (int) 17 => array( 'Advertisement' => array( 'id' => '59', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/geomax', 'images' => '2021051416090922e7bec3a6dfe8041780aa125f5f4932.jpg', 'display' => '3', 'created' => '2021-05-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '67', 'rght' => '68' ) ), (int) 18 => array( 'Advertisement' => array( 'id' => '60', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/south', 'images' => '20210623100351b1da5960a28a9deb6af4e028880d625b.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-06-23', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '69', 'rght' => '70' ) ), (int) 19 => array( 'Advertisement' => array( 'id' => '62', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/e-survey', 'images' => '20211124221103bda9f65e28426fc1f93c4f5f223cd1bc.png', 'display' => '3', 'created' => '2021-06-23', 'modified' => '2021-11-24', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '71', 'rght' => '72' ) ), (int) 20 => array( 'Advertisement' => array( 'id' => '68', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hi-target', 'images' => '2021112422134905fc59de564b69bfad9ca0b5f7204ffa.png', 'display' => '3', 'created' => '2021-08-05', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '73', 'rght' => '74' ) ), (int) 21 => array( 'Advertisement' => array( 'id' => '73', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/dji', 'images' => '2021102921504774fd5e8eec5eed69455accd89f7429e5.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '83', 'rght' => '84' ) ), (int) 22 => array( 'Advertisement' => array( 'id' => '74', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/spectra-geospatial-spectra-precision', 'images' => '202110292149162a2a919ea2a12b8255429f33eb51a1a8.png', 'display' => '3', 'created' => '2021-10-29', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '85', 'rght' => '86' ) ), (int) 23 => array( 'Advertisement' => array( 'id' => '75', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/efix', 'images' => '202207131224432d602a710c7f1a152566aec421d281d7.png', 'display' => '3', 'created' => '2022-07-13', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '87', 'rght' => '88' ) ), (int) 24 => array( 'Advertisement' => array( 'id' => '76', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/chcnav', 'images' => '20220714162725db2138b3dcabb86eedc65c4ba1f6ccce.jpg', 'display' => '3', 'created' => '2022-07-14', 'modified' => '2022-07-27', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '89', 'rght' => '90' ) ), (int) 25 => array( 'Advertisement' => array( 'id' => '78', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202208051039345c0c28b21fe05a0c9d4f65b176fe7063.jpg', 'display' => '3', 'created' => '2022-08-05', 'modified' => '2022-08-05', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '93', 'rght' => '94' ) ), (int) 26 => array( 'Advertisement' => array( 'id' => '79', 'name' => null, 'link' => 'https://tracdiathanhdat.vn/hang-khac', 'images' => '202210171541561896d0eb31d272d3d99a9a8c0d3582fa.png', 'display' => '3', 'created' => '2022-10-17', 'modified' => '2022-10-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '95', 'rght' => '96' ) ), (int) 27 => array( 'Advertisement' => array( 'id' => '100', 'name' => null, 'link' => '', 'images' => '20230515143931e088ce1b8d5b9bcf57916a733e5ff5e3.jpg', 'display' => '3', 'created' => '2023-05-15', 'modified' => '2023-05-15', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '117', 'rght' => '118' ) ), (int) 28 => array( 'Advertisement' => array( 'id' => '107', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/bua-dung-cho-khao-sat-dia-chat-estwing-e3-22p.html', 'images' => '20240130151328303b311c40a2276c91bf7e4f0aa460ce.png', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '125', 'rght' => '126' ) ), (int) 29 => array( 'Advertisement' => array( 'id' => '108', 'name' => null, 'link' => 'https://www.tracdiathanhdat.vn/ong-nhom-celestron-nature-dx-10-42.html', 'images' => '20240130151701574ebc151c3252c2eb93d6504efdc5ab.jpg', 'display' => '3', 'created' => '2024-01-30', 'modified' => '2024-01-30', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '127', 'rght' => '128' ) ), (int) 30 => array( 'Advertisement' => array( 'id' => '114', 'name' => null, 'link' => '', 'images' => '20250917151944a9ff8314bd4af3bf87c9037dceceff53.png', 'display' => '3', 'created' => '2025-09-17', 'modified' => '2025-09-17', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '131', 'rght' => '132' ) ) ) $chayphai = array( 'Advertisement' => array( 'id' => '50', 'name' => null, 'link' => '', 'images' => '202101200912401af8fe938eaa23ee6c9cfbac31bc2ae3.jpg', 'display' => '2', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '53', 'rght' => '54' ) ) $chaytrai = array( 'Advertisement' => array( 'id' => '49', 'name' => null, 'link' => '', 'images' => '2021012009122728dc0ef2b70634d0a45511fff4f68db7.jpg', 'display' => '1', 'created' => '2021-01-20', 'modified' => '2021-01-20', 'status' => '1', 'pos' => '0', 'content' => null, 'slug' => null, 'lft' => '51', 'rght' => '52' ) ) $chiasekinhnghiem = array() $list_menu_footer = array() $danhmuc_left_parent_sphot = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc_left_parent = array( (int) 0 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ) ) $danhmuc = array( (int) 0 => array( 'Catproduct' => array( 'id' => '1', 'name' => 'Trang chủ', 'slug' => 'trang-chu' ) ), (int) 1 => array( 'Catproduct' => array( 'id' => '3', 'name' => 'Giới thiệu ', 'slug' => 'gioi-thieu' ) ), (int) 2 => array( 'Catproduct' => array( 'id' => '2', 'name' => 'Sản phẩm', 'slug' => 'san-pham-1' ) ), (int) 3 => array( 'Catproduct' => array( 'id' => '5', 'name' => 'Phần mềm - HDSD ', 'slug' => 'phan-mem-hdsd' ) ), (int) 4 => array( 'Catproduct' => array( 'id' => '40', 'name' => 'Kiến thức - Ứng dụng', 'slug' => 'kien-thuc-ung-dung' ) ), (int) 5 => array( 'Catproduct' => array( 'id' => '6', 'name' => 'Liên hệ', 'slug' => 'lien-he' ) ) ) $support = array( (int) 0 => array( 'Support' => array( 'id' => '13', 'name' => 'Co so Ha noi', 'phone' => '098 987 678', 'yahoo' => 'duycuong7640', 'skype' => 'duycuong7640', 'pos' => '0', 'created' => '2013-09-13', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ), (int) 1 => array( 'Support' => array( 'id' => '16', 'name' => 'Co so TP.HCM', 'phone' => '3252 436 432', 'yahoo' => 'duycuong7640', 'skype' => 'tuvantubep', 'pos' => '0', 'created' => '2014-01-15', 'modified' => '2015-05-05', 'status' => '1', 'yahoo1' => 'duycuong7640', 'skype1' => '', 'hotline' => '0987 654 999', 'email' => '', 'name1' => '' ) ) ) $content_for_layout = '<style> @font-face{font-display:swap;font-family:ez-toc-icomoon;src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot');src:url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.eot#iefix') format('embedded-opentype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff2') format('woff2'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.woff') format('woff'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.ttf') format('truetype'),url('https://tracdiathanhdat.vn/fonts/ez-toc-icomoon.svg') format('svg');font-weight:400;font-style:normal} #ez-toc-container{background:#f9f9f9;border:1px solid #aaa;border-radius:4px;box-shadow:0 1px 1px rgba(0,0,0,.05);display:table;margin-bottom:1em;padding:10px;position:relative;width:auto}div.ez-toc-widget-container{padding:0;position:relative} #ez-toc-container.selected{ width: 10px; } #ez-toc-container.ez-toc-light-blue{background:#edf6ff}#ez-toc-container.ez-toc-white{background:#fff}#ez-toc-container.ez-toc-black{background:#000}#ez-toc-container.ez-toc-transparent{background:none transparent}div.ez-toc-widget-container ul{display:block}div.ez-toc-widget-container li{border:none;padding:0}div.ez-toc-widget-container ul.ez-toc-list{padding:10px}#ez-toc-container ul ul,.ez-toc div.ez-toc-widget-container ul ul{margin-left:1.5em}#ez-toc-container li,#ez-toc-container ul{margin:0;padding:0}#ez-toc-container li,#ez-toc-container ul,#ez-toc-container ul li,div.ez-toc-widget-container,div.ez-toc-widget-container li{background:0 0;list-style:none none;line-height:1.6;margin:0;overflow:hidden;z-index:1}#ez-toc-container p.ez-toc-title{text-align:left;line-height:1.45;margin:0;padding:0}.ez-toc-title-container{display:table;width:100%}.ez-toc-title,.ez-toc-title-toggle{display:table-cell;text-align:left;vertical-align:middle}#ez-toc-container.ez-toc-black p.ez-toc-title{color:#fff}#ez-toc-container div.ez-toc-title-container+ul.ez-toc-list{margin-top:1em}.ez-toc-wrap-left{float:left;margin-right:10px}.ez-toc-wrap-right{float:right;margin-left:10px}#ez-toc-container a{color:#444;box-shadow:none;text-decoration:none;text-shadow:none}#ez-toc-container a:visited{color:#000}#ez-toc-container a:hover{text-decoration:underline}#ez-toc-container.ez-toc-black a{color:#fff}#ez-toc-container.ez-toc-black a:visited{color:#fff}#ez-toc-container a.ez-toc-toggle{color:#444}#ez-toc-container.counter-flat ul,#ez-toc-container.counter-hierarchy ul,.ez-toc-widget-container.counter-flat ul,.ez-toc-widget-container.counter-hierarchy ul{counter-reset:item}#ez-toc-container.counter-numeric li,.ez-toc-widget-container.counter-numeric li{list-style-type:decimal;list-style-position:inside}#ez-toc-container.counter-decimal ul.ez-toc-list li a::before,.ez-toc-widget-container.counter-decimal ul.ez-toc-list li a::before{content:counters(item, ".") ". ";display:inline-block;counter-increment:item;margin-right:.2em}#ez-toc-container.counter-roman li a::before,.ez-toc-widget-container.counter-roman ul.ez-toc-list li a::before{content:counters(item, ".", upper-roman) ". ";counter-increment:item}.ez-toc-widget-container ul.ez-toc-list li::before{content:' ';position:absolute;left:0;right:0;height:30px;line-height:30px;z-index:-1}.ez-toc-widget-container ul.ez-toc-list li.active::before{background-color:#ededed}.ez-toc-widget-container li.active>a{font-weight:900}.ez-toc-btn{display:inline-block;padding:6px 12px;margin-bottom:0;font-size:14px;font-weight:400;line-height:1.428571429;text-align:center;white-space:nowrap;vertical-align:middle;cursor:pointer;background-image:none;border:1px solid transparent;border-radius:4px;-webkit-user-select:none;-moz-user-select:none;-ms-user-select:none;-o-user-select:none;user-select:none}.ez-toc-btn:focus{outline:thin dotted #333;outline:5px auto -webkit-focus-ring-color;outline-offset:-2px}.ez-toc-btn:focus,.ez-toc-btn:hover{color:#333;text-decoration:none}.ez-toc-btn.active,.ez-toc-btn:active{background-image:none;outline:0;box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.ez-toc-btn-default{color:#333;background-color:#fff;border-color:#ccc}.ez-toc-btn-default.active,.ez-toc-btn-default:active,.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{color:#333;background-color:#ebebeb;border-color:#adadad}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-image:none}.ez-toc-btn-sm,.ez-toc-btn-xs{padding:5px 10px;font-size:12px;line-height:1.5;border-radius:3px}.ez-toc-btn-xs{padding:1px 5px}.ez-toc-btn-default{text-shadow:0 -1px 0 rgba(0,0,0,.2);box-shadow:inset 0 1px 0 rgba(255,255,255,.15),0 1px 1px rgba(0,0,0,.075)}.ez-toc-btn-default:active{box-shadow:inset 0 3px 5px rgba(0,0,0,.125)}.btn.active,.ez-toc-btn:active{background-image:none}.ez-toc-btn-default{text-shadow:0 1px 0 #fff;background-image:linear-gradient(to bottom,#fff 0,#e0e0e0 100%);background-repeat:repeat-x;border-color:#dbdbdb;border-color:#ccc}.ez-toc-btn-default:focus,.ez-toc-btn-default:hover{background-color:#e0e0e0;background-position:0 -15px}.ez-toc-btn-default.active,.ez-toc-btn-default:active{background-color:#e0e0e0;border-color:#dbdbdb}.ez-toc-pull-right{float:right!important;margin-left:10px}.ez-toc-glyphicon{position:relative;top:1px;display:inline-block;font-family:'Glyphicons Halflings';-webkit-font-smoothing:antialiased;font-style:normal;font-weight:400;line-height:1;-moz-osx-font-smoothing:grayscale}.ez-toc-glyphicon:empty{width:1em}.ez-toc-toggle i.ez-toc-glyphicon{font-size:16px;margin-left:2px}[class*=ez-toc-icon-]{font-family:ez-toc-icomoon!important;speak:none;font-style:normal;font-weight:400;font-variant:normal;text-transform:none;line-height:1;-webkit-font-smoothing:antialiased;-moz-osx-font-smoothing:grayscale}.ez-toc-icon-toggle:before{content:"\e87a"} .toc_cap2{ padding-left: 25px!important; } .toc_cap3{ padding-left: 50px!important; } .ct-tt table.download{ width: 100%!important; } .ct-tt a.download{ background-color: #4a90e2;width: 90%;color: #fff;padding:10px;border-radius: 20px;display: block;text-align: center;text-transform: uppercase; } .ct-tt table.dangkythamgia{ width: 100%!important; } .ct-tt a.dangkythamgia{ padding:10px 20px; background-color: #00ffff; } .ct-tt div{max-width: 100%;} </style> <div class="bg-cat-danhmuc"> <div class="cat-title-danhmuc"> <a href="" title=""> <h1></h1> </a> </div> </div> <div class="box-content-detail"> <div class="clear-content"></div><div class="clear-content"></div> <div class="col-product"> <div class="box-new-content"> <div class="box-new-detail"> <div class="time-date"> 12:00:00 <span>11/09/2017</span> </div><!--end time-date--><div class="clear-content"></div> <div class="box-like-share"> <div class="like1"> <div class="fb-like" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-layout="standard" data-action="like" data-show-faces="true" data-share="true"></div> </div> </div><!--end box-like-share--><div class="clear-content"></div> <div class="ct-tt"> <style> #row-2097407503{display: flex;flex-wrap: wrap;} #row-2097407503 p{ margin-bottom: 20px; } .large-4 { flex-basis: 33.3333333333%;text-align: center; max-width: 33.3333333333%;margin-bottom: 30px; } .large-4 a{ color: #fff;text-transform: uppercase;font-weight:bold; } .large-4 .col-inner{padding:0 15px;} .expand { display: block; max-width: 100%!important; padding-left: 0!important; padding-right: 0!important; width: 100%!important;padding:10px; } .button.success { background-color: #4a90e2; } .box-shadow-4-hover:hover, .box-shadow-5-hover:hover, .row-box-shadow-4-hover .col-inner:hover, .row-box-shadow-5-hover .col-inner:hover { transform: translateY(-6px);box-shadow: 0 30px 40px 0 rgb(0 0 0 / 20%); } .box-shadow-1, .box-shadow-1-hover, .box-shadow-2, .box-shadow-2-hover, .box-shadow-3, .box-shadow-3-hover, .box-shadow-4, .box-shadow-4-hover, .box-shadow-5, .box-shadow-5-hover, .row-box-shadow-1 .col-inner, .row-box-shadow-1-hover .col-inner, .row-box-shadow-2 .col-inner, .row-box-shadow-2-hover .col-inner, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner, .row-box-shadow-4 .col-inner, .row-box-shadow-4-hover .col-inner, .row-box-shadow-5 .col-inner, .row-box-shadow-5-hover .col-inner { transition: transform .3s,box-shadow .3s,background-color .3s,color .3s,opacity .3s; } .box-shadow-3, .box-shadow-3-hover:hover, .row-box-shadow-3 .col-inner, .row-box-shadow-3-hover .col-inner:hover { box-shadow: 0 10px 20px rgb(0 0 0 / 19%), 0 6px 6px rgb(0 0 0 / 22%); } .button span { font-weight: 400; } .is-shade:after { box-shadow: inset 1px 1px 0 0 hsl(0deg 0% 100% / 10%), inset 0 2em 15px 0 hsl(0deg 0% 100% / 20%); } </style> <div class="" id="row-2097407503"> <p style="font-family:tahoma,geneva,sans-serif; font-size: 14px;"> Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline <b><a href="tel:0913 051 734">0913. 051.734</a></b> để được hỗ trợ!</p> <div id="col-680915017" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="tel:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Gọi Điện</span> </a> </div> </div> <div id="col-569433728" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer" href="sms:0913 051 734" target="_blank" class="button success is-shade box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>Nhắn Tin</span> </a> </div> </div> <div id="col-272138532" class="col medium-4 small-4 large-4"> <div class="col-inner"> <a rel="noopener noreferrer nofollow" href="https://zalo.me/0913051734" target="_blank" class="button success box-shadow-3 box-shadow-5-hover expand" style="border-radius:20px;"> <span>chat zalo</span> </a> </div> </div> </div> <div class="clear-main"></div> </div><!--end ct-tt--> <!--<div class="fb-comments" data-href="https://tracdiathanhdat.vn/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu.htm" data-width="715" data-numposts="5" data-colorscheme="light"></div>--> <div class="clear-content"></div><div class="clear-content"></div> </div><!--end box-new-detail--> <div class="bar-new-detail"> <label>Private same category</label> <div class="clear-main"></div> <ul> <li> <a href="https://tracdiathanhdat.vn/gnss-rtk.htm" title=""> <h3> <span>(18-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phan-mem-landstar-7-va-cach-cai-dat-tren-may-tinh.htm" title=""> <h3> <span>(06-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/irtk4-hi-target-a-simple-but-not-simplistic-gnss-system.htm" title=""> <h3> <span>(05-08-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/thong-so-ky-thuat-cua-mot-so-dong-may-toan-dac-dien-tu-leica-cu-tcr-403-tcr-405-tcr-407-tcr-705-tcr-802-tcr-805.htm" title=""> <h3> <span>(30-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/nhung-loi-thuong-gap-o-may-thuy-binh-dien-tu-leica-sprinter-50m-100m-150m.htm" title=""> <h3> <span>(29-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/so-sanh-giua-garmin-gpsmap-66s-vs-gpsmap-64s.htm" title=""> <h3> <span>(28-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/may-thuy-binh-ky-thuat-so-leica-ls10-va-ls15.htm" title=""> <h3> <span>(25-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/ong-nhom-va-nhung-luu-y-khi-mua-ong-nhom.htm" title=""> <h3> <span>(14-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/phu-kien-trac-dia.htm" title=""> <h3> <span>(12-07-2021)</span></h3> </a> </li> <li> <a href="https://tracdiathanhdat.vn/mot-so-luu-y-khi-chon-mua-may-bo-dam.htm" title=""> <h3> <span>(09-07-2021)</span></h3> </a> </li> </ul> <div class="clear-main"></div> </div><!--end bar-new-detail--> <div class="clear-main"></div> <div class="pagination"> <span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1" rel="first">« First</a></span><span class="prev"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15" rel="prev">« Previous</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:1">1</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:2">2</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:13">13</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:14">14</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:15">15</a></span><span class="current number">16</span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17">17</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:18">18</a></span><span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:19">19</a></span>...<span class="number"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20">20</a></span><span class="next"><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:17" rel="next">Next »</a></span><span><a href="/Product/chitiet/cach-kiem-tra-va-hieu-chinh-may-kinh-vi-dien-tu/page:20" rel="last">End »</a></span>Page 16/20. View 10/200. </div> <div class="clear-main"></div> </div><!--end box-ctbar--> </div> </div> <script type="text/javascript"> var ToC = "<div id='ez-toc-container' class='ez-toc-v2_0_17 counter-hierarchy ez-toc-grey'><div class='ez-toc-title-container'><p class='ez-toc-title'></p><span class='ez-toc-title-toggle'><a class='ez-toc-pull-right ez-toc-btn ez-toc-btn-xs ez-toc-btn-default ez-toc-toggle' style='display: inline'><i class='ez-toc-glyphicon ez-toc-icon-toggle'></i></a></span></div><nav role='navigation' class='menu_danhmuc'>" + // "<div class='tile_mucluc'><span>Mục lục:</span></div>" + "<ul class='ez-toc-list ez-toc-list-level-1'>"; var newLine, el, title, link ,id; $(".ct-tt h2 ,.ct-tt h3 ,.ct-tt h4").each(function() { el = $(this); title = el.text(); id = title.toLowerCase().replace(/\s+/,'-').replace(/à|á|ạ|ả|ã|â|ầ|ấ|ậ|ẩ|ẫ|ă|ằ|ắ|ặ|ẳ|ẵ/g,"a").replace(/è|é|ẹ|ẻ|ẽ|ê|ề|ế|ệ|ể|ễ/g,"e").replace(/ì|í|ị|ỉ|ĩ/g,"i").replace(/ò|ó|ọ|ỏ|õ|ô|ồ|ố|ộ|ổ|ỗ|ơ|ờ|ớ|ợ|ở|ỡ/g,"o").replace(/ù|ú|ụ|ủ|ũ|ư|ừ|ứ|ự|ử|ữ/g,"u").replace(/ỳ|ý|ỵ|ỷ|ỹ/g,"y").replace(/đ/g,"d").replace(/!|@|\$|%|\^|\*|\(|\)|\+|\=|\<|\>|\?|\/|,|\.|\:|\'| |\"|\&|\#|\[|\]|~/g,"-").replace(/-+-/g,"-").replace(/^\-+|\-+$/g,""); $(this).attr('id', id); if($(this).is("h2")){ newLine = "<li>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h3")){ newLine = "<li class='toc_cap2'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } if($(this).is("h4")){ newLine = "<li class='toc_cap3'>" + "<a href='#"+ id + "' >" + title + "</a>" + "</li>"; } ToC += newLine; }); ToC += "</ul>" + "</nav></div><div style='clear:both;'></div>"; $(".ct-tt").prepend(ToC); $( ".ez-toc-glyphicon" ).toggle( function() { $('#ez-toc-container').addClass( "selected" ); $('.menu_danhmuc').hide(); }, function() { $('#ez-toc-container').removeClass( "selected" ); $('.menu_danhmuc').show(); } ); </script> ' $scripts_for_layout = '' $count = (int) 0 $price = (int) 0 $sl = (int) 0 $cap1 = array( 'Catproduct' => array( 'id' => '6', 'name' => 'Liên hệ', 'slug' => 'lien-he' ) ) $dm_c2 = array() $cap2 = array( 'Catproduct' => array( 'id' => '47', 'name' => 'Sản phẩm khác', 'parent_id' => '2', 'alias' => 'san-pham-khac', 'images' => '2024010816004972262bc63fc2344d41a2a0d35c8176a7.png', 'lft' => '28', 'rght' => '29', 'pos' => '14', 'status' => '1', 'title_seo' => 'địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,..', 'meta_key' => 'địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,..', 'meta_des' => 'Chuyên cung cấp địa bàn địa chất, la bàn, la ban, búa địa chất, máy đo độ dày bê tông,camera hồng ngoại, máy đo độ bụi, máy đo độ cứng bê tông, bật mực, nhiệt kế, súng bắn bê tông,.. Trắc địa Thành Đạt cam kết mang tới cho khách hàng những sản phẩm chính hãng chất lượng tốt nhất, giá cả hợp lý, hỗ trợ tư vấn, chuyển giao công nghệ miễn phí, dịch vụ chăm sóc khách hàng tận tâm 24/7! ', 'created' => '2016-01-25', 'modified' => '2024-01-08', 'slug' => 'san-pham-khac', 'cate' => '4', 'link' => 'san-pham', 'name_eng' => '', 'name_tq' => '', 'type' => 'product', 'hot' => '0', 'content' => '', 'display' => '0', 'content_eng' => null ) ) $dm_c3 = array()include - APP/View/Elements/menu.ctp, line 56 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::element() - CORE/Cake/View/View.php, line 424 include - APP/View/Layouts/home.ctp, line 169 View::_evaluate() - CORE/Cake/View/View.php, line 920 View::_render() - CORE/Cake/View/View.php, line 883 View::renderLayout() - CORE/Cake/View/View.php, line 539 View::render() - CORE/Cake/View/View.php, line 483 Controller::render() - CORE/Cake/Controller/Controller.php, line 957 ProductController::chitiet() - APP/Controller/ProductController.php, line 135 ReflectionMethod::invokeArgs() - [internal], line ?? Controller::invokeAction() - CORE/Cake/Controller/Controller.php, line 485 Dispatcher::_invoke() - CORE/Cake/Routing/Dispatcher.php, line 186 Dispatcher::dispatch() - CORE/Cake/Routing/Dispatcher.php, line 161 [main] - APP/webroot/index.php, line 92

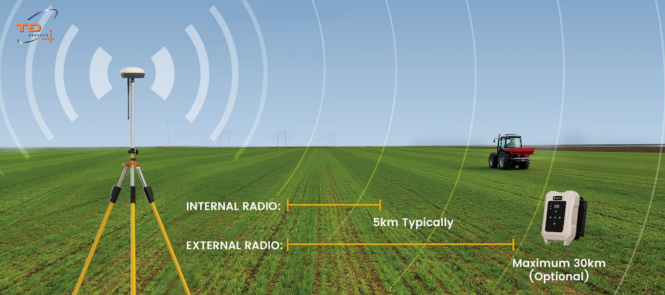













12:00:00
11/09/2017
Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline 0913. 051.734 để được hỗ trợ!


