


















12:00:00
03/06/2024
Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline 0913. 051.734 để được hỗ trợ!
1. Sai lệch giới hạn
1.1 Dự kiến
Trước khi dùng ứng dụng này, file chuẩn bị sai lệch giới hạn phải dự kiến và chọn. Dự kiến sai lệch giới hạn có thể làm trên phần mềm máy tính Mining Editor hoặc nhập tay trực tiếp trên máy toàn đạc.
> Thao tác trên máy toàn đạc như sau:
Từ màn hình Main Menu → chọn Prog → Nhập mã Pin → Ấn OK → Xuất hiện file chuẩn bị sai lệch giới hạn.
Chú ý: Nếu nhập sai mã PIN 5 lần, phải dùng mã Personal UnblocKing (PUK) trong tài liệu chứng từ cấp theo máy. Nếu nhập đúng mã PUK, mã PIN đặt về mặc định là “123456”.
1.2 Chọn file chuẩn bị sai lệch giới hạn
Chạy ứng dụng Mining → chọn Set Tolerances → chọn Select Tolerances → chọn một cấp độ file chuẩn bị giới hạn cho phép đem dùng Primary, Secondary hay Tertiary → ấn SET để đặt file chuẩn bị đã chọn → ấn ACCEPT để chấp nhận file chuẩn bị trên màn hình báo cáo sai lệch giới hạn.
Chú ý:
- Sai lệch giới cho trên có thể thay đổi bằng cách dùng mã bảo vệ PIN, xem mục “1.1 Dự kiến sai lệch giới hạn”.
- Nếu sai lệch giới hạn nạp từ phần mềm Mining Editor biên tập trên máy tính, nó sẽ báo “Uploaded” và không thay đổi được trên máy toàn đạc.
1.3 Mã Mining PIN (Personal Identification Number)
Các số liệu về Dự kiến sai lệch giới hạn, khối đo xa EDM và thông tin được bảo vệ bởi mã PIN đề phòng người không được phân quyền đem thay đổi.
> Thao tác trên máy toàn đạc:
Chọn Setting từ MAIN MENU →chọn Mining từ SETTINGS MENU → nhập mã Mining PIN hiện thời trong PIN-CODE → ấn OK → nhập mã của các nhân Mining PIN (tối đa 6 chữ số) trong New PINCode → Chấp nhận với OK.
2. Đo Lò/ Hầm
2.1 Giới thiệu
Ứng dụng Peg Survey được dùng khi:
- Thiết lập hướng đào lò/hầm (điểm).
- Kiểm tra tại chỗ góc kẹp (góc ngang) giữa điểm định hướng backsigh và các điểm dẫn hướng thi công foresight points.
- Kiểm tra cạnh bằng và chiều cao của điểm định hướng backsigh và các điểm dẫn hướng thi công foresight points.
- Tính tọa độ của điểm dẫn hướng thi công foresight point.
- Thực hiện đo lặp vài lần theo trật tự, chất lượng đo được khống chế bởi sai lệch giới hạn đã đặt trước khi bắt đầu đo Peg Survey.
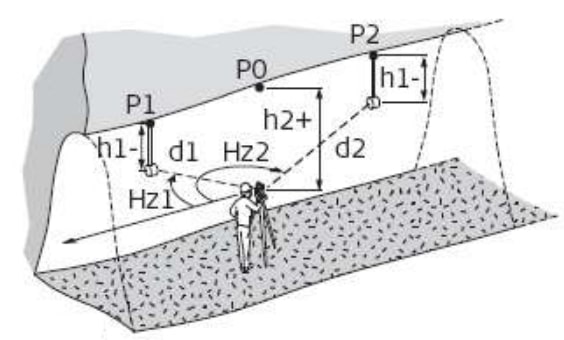
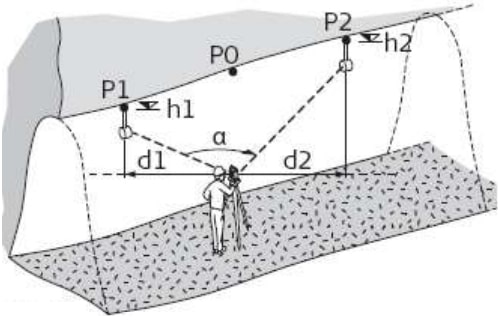
- P0 điểm trạm máy
- P1 điểm định hướng Backsight point
- P2 điểm dẫn hướng đào Foresight point
- h1 cao gương (nếu vách ổn định thì là điểm đánh dấu khi dùng chế độ đo không gương)
- h2 cao máy
- d1 khoảng cách máy tới điểm định hướng backsight point
- d2 khoảng cách máy tới điểm dẫn hướng đào foresight point
- HZ1 góc định hướng tới điểm định hướng backsight point
- HZ2 góc định hướng tới điểm thi công đào foresight point
- Biết: Tọa độ trạm máy và Tọa độ điểm định hướng backsight point
- Chưa biết: Tọa độ điểm dẫn hướng đào foresight point
2.2 Xuất phát đo tuyến
Thao tác: Từ Main Menu → Chọn Prog → Chọn Peg Survey → Chọn Job → Chọn file chuẩn bị sai lệch giới hạn Start để vào khai báo trạm máy Input Station.
Nhập các thông tin:
- PTID: Tên điểm
- HI: Cao máy (Để đo cao máy, đưa ống kính thẳng lên đỉnh lò/ hầm ở nơi đặt máy (theo dõi hiển thị góc đứng V:), ấn DIST để đo khoảng cách tới nóc tuyến). Chú ý : cao máy thường mang dấu âm “-“.
> Ý nghĩa các trường hiển thị trong trang Tolerance Info:
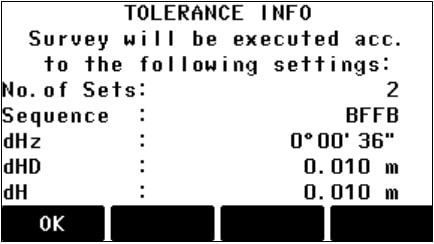
- No. of Sets 1 bộ đo là đo điểm định hướng backsight point P1 hai lần và điểm hướng đào foresight point P2 hai lần, ở cả 2 mặt máy.
- Sequence: Hiển thị trật tự thao tác đo, chọn một trong 3 cách BFFB/ BFBF/ BBFF
- Backsight: Điểm định hướng và Foresight điểm hướng đào.
- dHz: Sai lệch thực tế theo hướng ngang.
- dHD: Sai lệch thực tế theo khoảng cách.
- dH: Sai lệch thực tế theo chiều cao.
- Ấn OK để thao tác đặt số bộ đo trên màn hình. Màn hình hiển thị số lần bộ đo đã thực hiện trong tổng số bộ đo còn lại. Ví dụ: Set 1 of total 3 nghĩa là mới đo bộ thứ nhất của 3 bộ đo.
- Ấn BasePl để truy cập màn hình BASEPLATE CHANGE. Ở đây trị số Hz có thể nhập bởi hướng sẽ phải quay thân máy (Hoặc ấn OK để vào màn hình Measure Backsight Point cho thông tin về điểm điểm định hướng người đứng máy đã đo)
- Ấn OK thao tác vào màn hình đo điểm định hướng.
2.3 Đo lò/ hầm
Từ màn hình Measure Backsight Point → ấn OK.
Màn hình Backsight Point
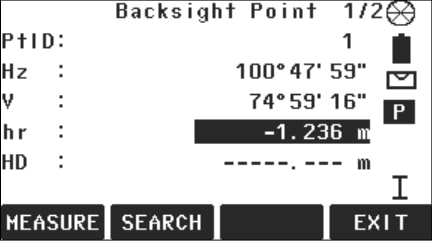
- MEASURE: Đo góc/ cạnh và lưu kết quả đo.
- SEARCH: Tìm một điểm định hướng khác.
- EXIT: Thoát ứng dụng quay về màn hình cài đặt
- PEG SURVEY: Màn hình cài đặt.
Màn hình Foresight Point
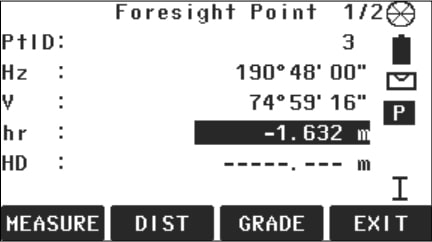
- DIST đo canh/ góc không lưu kết quả đo.
- GRADE biên tập độ dốc edit current grades.
Thao tác đo điểm
- B1: Nhập cao gương hr: cho điểm định hướng nếu cần.
- B2: Ngắm điểm định hướng và ấn MEASURE.
- B3: Tùy theo trật tự đo đã chọn, nhập tên điểm định hướng backsight hau hướng đào foresight PtID → Ấn OK lưu tên điểm và thao tác vào màn hình đo.
- B4: Nhập cao gương hr: cho điểm nếu cần.
- B5: Ngắm gương và ấn MEASURE.
-
B6: Dự định chỗ nào để đo điểm bổ sung :
- NO lặp lại bước 2. và 5. Đến khi tất cả các bộ đã được đo.
- YES lặp lại bước 3. Tới 5. Với điểm đo mới.
- Chú ý : tối đa cho 7 điểm bổ sung có thể đem đo.
-
B7: Nếu sai lệch giới hạn sau 1 bộ đo không đáp ứng, người đứng máy có thể tùy chọn đo tiếp hay bỏ qua số liệu.
- REJECT bỏ qua việc đo đã làm và đo lại bộ đo.
- ACCEPT chấp nhận kết quả và tiếp tục với bộ đo sau.
Tiếp tục
Sau từng bộ đo màn hình TOLERANCES MET, hay Out of tolerance sẽ hiển thị. Màn hình đáp ứng sai lệch giới hạn:
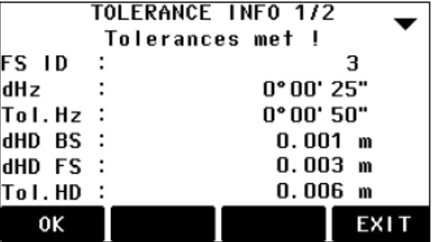
Ý nghĩa các trường:
- BS/FS ID tên điểm định hướng backsight và hướng đào foresight.
- dHz góc ngang thực tế.
- Tol.Hz sai lệch góc ngang.
-
dHD BS/FS chênh lệch cạnh bằng thực tế cho điểm định hướng backsight và
hướng đào foresight. - Tol.HD sai lệch cạnh bằng.
- dH BS/FS chênh cao thực tế điểm định hướng backsight và hướng đào foresight.
- Tol.H sai lệch cao độ.
- Set No số bộ đo.
2.4 Kết quả đo hầm/lò
Kết quả dẫn tuyến
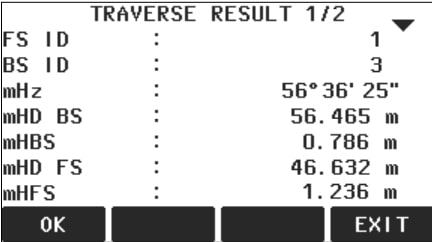
- BS/FS ID tên điểm định hướng backsight và hướng đào foresight.
- mHz góc ngang trung bình giữa điểm định hướng backsight và hướng đào foresight.
- mHD BS/FS khoảng cách trung bình giữa điểm định hướng backsight và hướng đào foresight.
- mH BS/FS cao độ trung bình giữa điểm định hướng backsight và hướng đào foresight.
- Sequence trật tự đo.
- No. of Sets số lượng của bộ đo.
- P0 Station trạm máy
- P1 Backsight point điểmt định hướng
- P2 Foresight point điểm hướng đào
- α mHz: góc ngang trung bình
- d1 mHDBS: khoảng cách trung bình tới điểm định hướng backsight point
- d2 mHDFS: : khoảng cách trung bình tới điểm hướng đào foresight point
- h1 mHBS: : cao độ trung bình tới điểm định hướng backsight point
- h2 mHFS: cao độ trung bình tới điểm hướng đào foresight point
Lưu số liệu các kết quả được lưu vào bộ nhớ trong.
- Kết quả Result Góc ngang trung bình mHz giữa điểm định hướng backsight và điểm hướng đào foresight points/ cạnh bằng trung bình mHD, cao độ trung bình mH tới điểm định hướng backsight và điểm hướng đào foresight points.
- Sai lệch thực tế Residual góc ngang dHz, cạnh bằng dHD, chênh cao dH.
- Tọa độ điểm hướng đào foresight point E, N, H./ cao độ dốc GrEl.
Tiếp tục ấn OK để lưu số liệu thoát ứng dụng. Xuất hiện màn hình CONTINUE WITH… cho truy cập ứng dụng đánh dốc GRADES hay đo điểm khuất OFFSET, xem “4.2 Xuất phát đánh dốc” và “5.2 Xuất phát đo điểm khuất Starting Offset”.
3. Đào lò chợ, xuyên vỉa/ hầm nhánh Line Peg
Ứng dụng Line Peg dùng tạo tuyến nhánh đào mới, và tương tự đo lò/ hầm Peg Survey trừ chỉ cần thao tác đo ở chế độ một bộ đo “one set”.
Xem hướng dẫn thao tác “2 Đo lò/ hầm Peg Survey”
4. Đào dốc Grades
4.1 Giới thiệu
- Ứng dụng đào dốc Grades là để:
- Đánh dấu đường dốc dọc 2 bên vách lò hay hầm.
- Nhập phần trăm độ dốc và an offset concerning the grade point.
- Tính chênh cao điểm cắm.
- Sơ họa vị trí các điểm dốc dọc theo đường dốc
- P0 Station trạm máy
- P1 Backsight point điểm định hướng
- P2 Foresight point điểm hướng đào
- a đường dốc mới
- P3a – P6a điểm đo
- P3b – P6b điểm đo mới
- dHD cạnh bằng dọc theo tuyến đào
- H cao độ hiện thời của đường dốc trên nền lò/hầm
- dH chênh cao tới đường dốc mới
- Tọa độ và cao độ đánh dốc của trạm máy
- Tọa độ và cao độ đánh dốc của điểm định hướng
- Phần trăm độ dốc, từ trạm máy đến điểm đào
- Chênh cao dH giữa đường dốc hiện thời với đường dốc mới
- Chênh cao điểm cắm dHgt giữa điểm đã đo và điểm đánh dốc
- Cạnh bằng dHD dọc theo tuyến đào
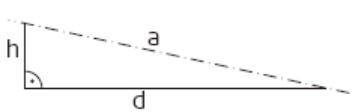
Phần trăm độ dốc
- a đường dốc
- h chiều cao
- d cự ly chênh cao
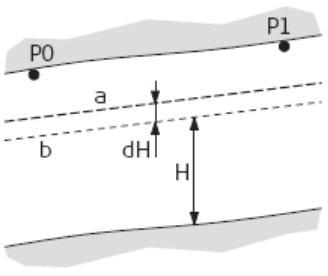
Chênh cao
- P0 Station trạm máy
- P1 Foresight point điểm hướng đào
- a đường dốc mới
- b đường dốc hiện thời
- H cao độ hiện thời của dường dốc bên trên sàn lò/ hầm
- dH chênh cao giữa đường dốc hiện thời và đường dốc mới
Ứng dụng Grades xuất phát từ chọn nó trong PROGRAMS hay sau khí đo trong ứng dụng đo tuyến PEG SURVEY và LINE PEG.
Khi xuất phát từ menu PROGRAMS, phải nhập số liệu trạm máy và làm phép đo tới điểm định hướng backsight và điểm hướng đào trước khi dùng ứng dụng đánh dốc Grade.
Thao tác đánh dốc grades
- B1: Chọn Prog từ MAIN MENU.
-
B2: Chọn GRADES & OFFSET từ menu PROGRAMS, và hoàn thành bước:
- Chọn một job
- Xác định đặt sai lệch giới hạn, xem “1.2 chọn file chuẩn bị sai lệch giới hạn”.
- B3: Chọn Start để thao tác vào màn hình Input Station.
- B4: Nhập số liệu trạm máy và đo tới điểm định hướng backsight và hướng đào foresight, xem “2 Đo lò/ hầm Peg Survey”.
- B5: Chấp nhận sai lệch thực tế từ kết quả đo.
- B6: trong màn hình CONTINUE WITH, ấn GRADES để xuất phát ứng dụng.
Nhập độ dốc yêu cầu, ví dụ 1:150, và chênh cao. Nếu độ dốc từ trạm máy tới điểm hướng đào giống với điểm định hướng tới trạm máy thì không cần nhập nữa.
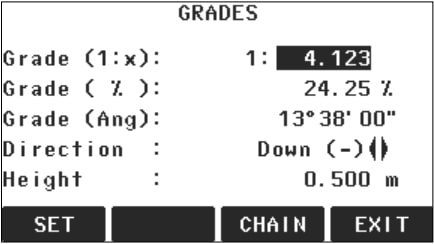
- SET Để lưu trị số hiện thời.
- CHAIN Để nhập chiều dài lý trình thay cho độ dốc
- EXIT Thoát ứng dụng quay về màn hình CONTINUE WITH
4.3 Đánh dấu đường dốc
Truy cập Ấn SET từ màn hình GRADES
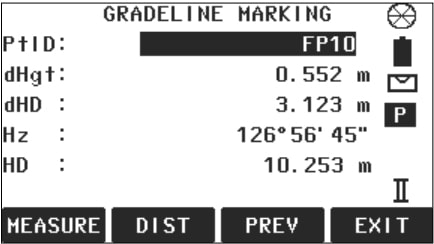
- MEASURE Để xuất phát đo góc/ cạnh và lưu kết quả đo.
- DIST Để đo cạnh/ góc mà chưa lưu kết quả đo.
- PREV Quay về màn hình trước đấy.
- EXIT Thoát ứng dụng quay về màn hình GRADES.
- PtID: Tên điểm đo.
- dHgt: Chênh cao giữa điểm đo và điểm cần đanh dốc. Chú ý : nếu mang dấu âm thì điểm cắm nằm cao hơn điểm đo. Ngược lại nếu là dấu dương.
- dHD: Chênh lệch cạnh bằng giữa điểm đo và điểm cần đánh dốc. Chú ý : nếu mang dấu âm thì điểm cần cắm nằm xa hơn điểm đo. Ngược lại nếu là dấu dương.
- Hz: Góc ngang hiện thời.
- HD: Cạnh bằng hiện thời.
- B1.: Nhập tên điểm dự kiến PtID:.
- B2: Ngắm gương và ấn MEASURE. Hiển thị hênh cao dHgt: và chênh khoảng cách dHD:.
- B3: Quay ống kính đến khi chênh cao dHgt: về 0, rồi đo lại.
4.4 Kết quả đánh dốc
Ứng dụng Grades tính chênh cao dHgt giữa điểm đo và điểm cần cắm, và chênh lệch khoảng cách ngang dHD dọc tuyến đào.
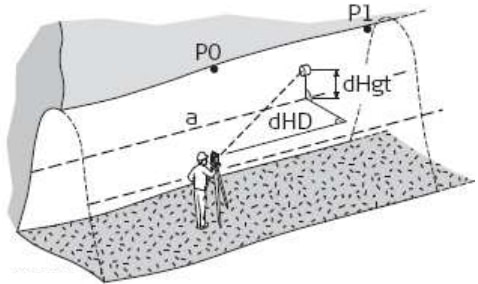
- P0 Station trạm máy
- P1 Foresight point điểm hướng đào
- a đường dốc
- dHgt chênh cao
- dHD chênh lệch cự ly (cạnh bằng)
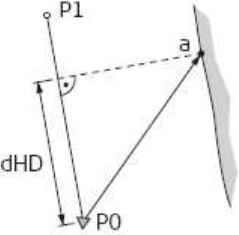
Nhìn từ trên cao xuống:
- P0 Station trạm máy
- P1 Foresight point điểm hướng đào
- a điểm đánh dốc mới
- dHD chênh cự ly
-
Số liệu đo tên điểm PtID, góc ngang Hz, góc đứng V, cạnh bằng HD, cạnh chéo
SD, chênh cao dH. - Tọa độ điểm đường dốc mới E, N, H.
- Kết quả đánh dốc chênh cao điểm cần cắm daH, cự ly dọc tuyến đào daHD, độ dốc Grd và cao độ đánh dốc GE
5. Đo Offset
5.1 Giới thiệu
Ứng dụng đo Offset được dùng để:
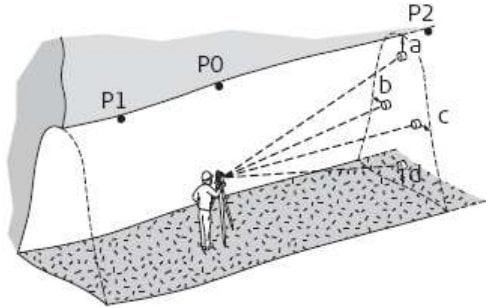
- Ghi mặt cắt/ gương của lò/ hầm cho tính khối lượng và lập bản vẽ.
- Nhập trị số offset value, dịch trái left, dịch phải right, dịch lên up hay dịch xuống down.
- Tính, đo lại, tọa độ hiện thời vách/ vòm của lò/ hầm.
.jpg)
- P0 Station trạm máy
- P1 Backsight point điểm định hướng
- P2 Foresight point điểm hướng đào
- a Up đỉnh
- b Left trái
- c Right phải
- d Down đào
- Tọa độ trạm máy
- Tọa độ điểm định hướng backsight point
- Trị số Offset
- Tọa độ vách/ vòm/ nền của lò/ hầm
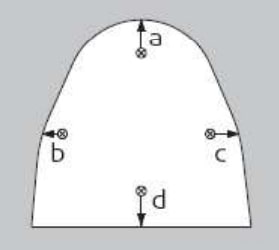
- a Up tới đỉnh
- b Left sang bên trái
- c Right sang bên phải
- d Down đào tới nền
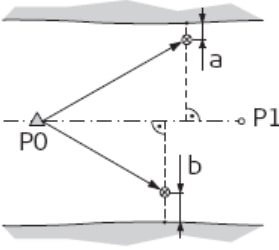
- P0 Station trạm máy
- P1 Foresight point điểm hướng đào
- a Offset left cách bên trái
- b Offset right cách bên phải
5.2 Xuất phát đo Offset
Truy cập Ứng dụng Offset được xuất phát bằng cách chọn nó trong menu PROGRAMS hay đo sau khi đo ứng dụng đo tuyến PEG SURVEY và đo tim LINE PEG.
Khi xuất phát từ menu PROGRAMS, phải nhập khai báo trạm máy và đo tới điểm định hướng backsight và điểm hướng đào foresight, trước khi đo ứng dụng Offset.
Thao tác xuất phát đo offset
- B1: Chọn Prog từ MAIN MENU.
- B2: Chọn GRADES & OFFSET từ menu PROGRAMS, và hoàn thành các việc
- Chọn job, và
- Xác nhận đặt sai lệch giới hạn, xem “1.2 Chọn file chuẩn bị sai lệch giới hạn”.
- B3: Chọn Start để thao tác màn hình Input Station.
- B4: Nhập số liệu trạm máy và đo tới điểm định hướng backsight và điểm hướng đào foresight, xem mục “2 Đo tuyến”.
- B5: Chấp nhận sai lệch giới hạn từ các phép đo thực tế.
- B6: Trong màn hình CONTINUE WITH, ấn OFFSET để xuất phát đo ứng dụng Offset.
- MEASURE Để xuất phát đo góc và cạnh, và lưu kết quả đo.
- DIST Để xuất phát đo cạnh và góc không lưu trị số.
- EXIT Thoát ứng dụng quay về màn hình CONTINUE WITH.
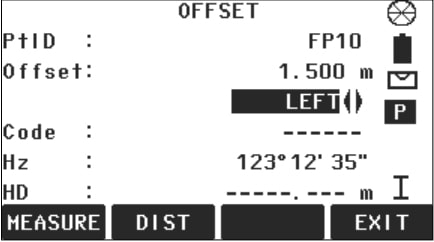
- B1: Nhập tên điểm dự kiến PtID: avà trị số offset.
- B2: Chọn vị trí dự kiến đo offset Left, Right, Up hay Down.
- B3: Ngắm gương và ấn MEASURE. Máy sẽ thực hiện đo và ghi lưu. Chú ý: Sau khi lưu ứng dụng quay v ề màn hình OFFSET
- B4: Để đo điểm mới, lặp lại bước 1 đến 3
5.3 Kết quả đo Offset
Chú ý : số liệu đo tuân đúng theo trị số offset đã nhập. Lưu số liệu các kết quả sau đây được lưu vào bộ nhớ trong
- Số liệu đo : tên điểm PtID, Hz, V, HD và SD.
- Thông tin Offset : trị số Offset, hướng OffsetDir (left, up, right, down).
- Tọa độ điểm offset mới : E, N, H.

Liên hệ:
Số 145 Láng Hạ, Đống Đa, Hà Nội
Số 5/161 Nguyễn Tuân. Thanh Xuân, Hà Nội
Hotline: 0913051734 (call/imesage/zalo)
Website: www.tracdiathanhdat.vn
Email: tracdiathanhdat@gmail.com
@ Luôn đồng hành cùng bạn!
>>> Xem thêm: Ứng dụng giao thông Road 2D ở máy toàn đạc Leica


