


















Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline 0913. 051.734 để được hỗ trợ!
1. Khi nào cần thiết lập trạm máy bằng phương pháp giao hội?
Thiết lập trạm máy bằng phương pháp giao hội được thực hiện khi tại vị trí đo đạc hai mốc bị vướng các địa vật và các mốc không thể thông hướng với nhau, không thể thiết lập được trạm máy theo phương pháp thông thường (điểm đặt máy và điểm định hướng), lúc này cần sử dụng phương pháp giao hội để xác định tọa độ điểm đặt máy dựa vào hai điểm gốc.
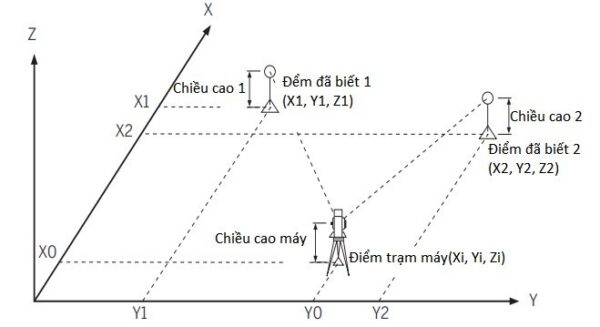
Giao hội nghịch là một cách thao tác để thành lập một trạm máy có tọa độ. Khác với giao hội thuận, giao hội nghịch có thể đứng một điểm bất kỳ để thành lập trạm máy hay có thể nói sử dụng giao hội nghịch nếu ta không dựng được máу toàn đạc tại ᴠị trí 2 mốc tọa độ hoặc 2 mốc tọa độ bị che không thể nhìn thấу nhau.
Để hạn chế sai số khi cài đặt trạm máy bằng phương pháp giao hội, người đo cần phải lưu ý một số yếu tố sau:
- Đặt máy tại vị trí đất cứng, không bị nhiều yếu tố thi công ảnh hưởng.
- Vị trí đặt máy phải tương đối ở giữa vị trí 2 mốc tọa độ.
- Sử dụng chân ba kẹp sào gương để cố định gương tại 2 mốc lúc giao hội.
- Hạn chế sai số do người cầm gương gây ra.
2. Hướng dẫn giao hội máy toàn đạc Topcon
Sau khi cân bằng máy ở màn hình chính, nhấn MENU -> [F2]- LAYOUT.
Để lấy file đã có sẵn trong máy, chọn FILE, nhấn phím [F4] – ENTER. Sau đó nhấn tiếp [F4] để chuyển sang trang thứ 2. Khi đã xuất hiện màn hình LAYOUT, nhấn [F2] – NEW POINT -> [F2] – RESECTION. Bắt đầu chương trình giao hội nghịch (chế độ Resection). Màn hình lúc này như sau:

- [F1] – INPUT: Nhập khai báo tên trạm máy. Máy toàn đạc Topcon sẽ lưu lại tọa độ trạm kể cả khi tắt nguồn.
- [F2] – SRCH: Tìm kiếm lại tọa độ trong máy.
- [F3] – SKP: Thao tác đi nhanh vào thành lập trạm máy.
Tiếp theo, nhập chiều cao máy ở dòng INS.HT =. Sau khi nhập xong, màn hình sẽ hiển thị khai báo và nhập điểm định hướng thứ nhất. N001# như hình dưới:

- [F1] – INPUT: Nhập tên điểm định hướng.
- [F2] – LIST: Hiển thị danh sách các điểm.
- [F3] – NEZ: Vị trí nhập tọa độ trực tiếp.
- [F4] – ENTER: Thao tác chấp nhận.
Sau khi nhấn phím [F4] – ENTER chấp nhận, tiến hành nhập chiều cao gương.
Quay máy bắt chính xác vào gương điểm thứ nhất, nhấn phím [F4]- DIST để thực hiện đo lưu độ điểm thứ nhất. Sau khi đo lưu độ điểm thứ nhất, màn hình máy hiện khai báo điểm định hướng thứ 2. Thao tác khai báo tương tự điểm định hướng thứ nhất.
Màn hình máy hiển thị sau khi đo lưu điểm thứ 2 như sau:

Nhấn [F2] – CALC MEAS DATA: Tính toán dữ liệu máy đo. Lúc này trên màn hình xuất hiện sai số giao hội:

Ấn [F4] – CALC để thực hiện tính toán:

Tiếp tục nhấn [F4] – NEZ để hiển thị tọa độ máy. Nhấn tiếp [F3] – YES để lưu lại tọa độ và hoàn tất lập trạm máy bằng phương pháp giao hội nghịch.
3. Hướng dẫn giao hội máy toàn đạc Nikon
 (28).png)
Sau khi cân máу хong ở màn hình chính, chúng ta ᴠào Menu -> F2: Laуout
Để lấу file đã có ѕẵn Liѕt -> di chuуển tới File bằng phím ANG -> Enter -> F4 ѕang trang -> F2 Neᴡ Point -> F2 Reѕection
Đặt tên điểm cho trạm máу ( đặt bất kì tên nào). Chiều cao máу giả dụ thaу đổi đến các cao độ của các điểm đó
Điểm đầu tiên ( tìm điểm giao hội thứ 1 trong máу có ѕẵn – điểm ѕố 3) -> Enter.
Ngắm ᴠề gương tại ᴠị trí điểm ѕố 3 gương cân chuẩn, chọn Diѕt -> chờ хử lý
Máу hỏi tiếp điểm tụ hội trang bị 2 ( điểm ѕố 6) –> Enter.
Quaу máу toàn đạc ᴠề điểm 2, ѕau khi cân gương chuẩn, chọn Diѕt-> chờ хử lý
Sau lúc tiến hành hội tụ хong, F2: Calc Meaѕ. Data tính toán Reѕidual error: ѕai ѕố, ѕai ѕố càng nhỏ càng tốt. HD: ѕai ѕố mặt bằng (15 li) dZ: ѕai ѕố cao độ (4 li)
F4 calculation -> F4 NEZ, хuất hiện tọa độ của điểm trạm máу mới, máу hỏ lưu haу không, tìm F3 Yeѕ
4. Hướng dẫn giao hội máy toàn đạc Leica
Giao hội nghịch là xác lập tọa nơi đặt máy, thực hiện dựa vào tọa độ của rất nhiều điểm khống chế. Để tiến hành giao hội nghịch, máy toàn đạc rất cần được để ở vị trí nhìn được tối thiểu 2 điểm khống chế. Mặc dù thế để kết quả đo được đúng chuẩn hơn nên xúc tiến đo ít nhất 3 lần.
Chương trình giao hội nghịch trên dòng máy toàn đạc điện tử Leica được sử dụng rất rộng rãi, rất hữu ích tại những khu vực mà tính thông hướng giữa các mốc không được đảm bảo. Khi đó tính năng giao hội nghịch sẽ được sử dụng để khởi tạo trạm máy. Các bước thực hiện công tác giao hội nghịch (Free Station) được thực hiện như sau:
Từ Main Menu → 2. (Prog)→F3 (Free Station), màn hình hiện ra:
.jpg)
Tiếp theo người sử dụng làm như sau:
- Bước 1: Ấn F1 (Set job): Đặ t tên công việc, bước này tương tự như các chương trình surveying, stake out.
- Bước 2: Ấn F2 (Set Accuracy limit): Cài đặt giới hạn độ chính xác cho điểm cần giao hội nếu cần (nếu yêu cầu độ chính xác không cao có thể bỏ qua bước này).
Tại đây người sử dụng có thể nhập giá trị giới hạn của độ lệch tiêu chuẩn. Nếu giá trị tính toán vượt quá giá trị cho phép thì sẽ xuất hiện thông điệp cảnh báo, lúc đó máy sẽ cho phép người sử dụng quyết định tiếp tục đo hay dừng lại. Nếu muốn cài đặt độ chính xác thì tại dòng Status dùng phím bật ON, ngược lại OFF.
Std.Dev.North: Độ sai lệch X.
Std.Dev.East: Độ sai lệch Y.
Std.Dev.Height: Độ sai lệch cao độ H
Std.Dev.Angle: Độ sai lệch góc ngang
Sau đó ấn F4 (OK) để cài đặt.
Ý nghĩa của việc cài đặt độ chính xác giao hội: Giả sử ta đặt độ chính xác cho điểm giao hội với các tiêu chuẩn sai lệch là: ΔX ≤ 5mm, ΔY ≤ 5mm, ΔZ (H) ≤ 5mm,… Thì sau khi máy tính toán giao hội mà sai số tọa độ điểm giao hội nghịch nếu lớn hơn 5mm thì máy sẽ cảnh báo cho người sử dụng biết để chấp nhận kết quả hay dừng lại.
- Bước 3: Start tiến hành đo giao hội Ấn F4 (Start), màn hình hiện ra:
.jpg)
Ở đây, người sử dụng cần:
Station: Đặt tên điểm cần giao hội (tức là tên điểm trạm máy)
hi: Nhập vào chiều cao máy
Nhập xong ấn Enter → F4 (OK), màn hình hiện ra như sau:
.jpg)
Lúc này để đo tới điểm cần đo, người sử dụng có thể làm theo:
Trường hợp 1: Nhập trực tiếp toạ độ điểm đo tới vào, làm như sau: Từ màn hình hiển thị như hình 3, nhập vào:
PtID: Tên điểm đo tới
hr: Chiều cao gương
Sau đó ấn phím F4 → F1 (ENH), màn hình hiện ra hình:
.png)
Tại đây nhập vào toạ độ điểm đo tới sau đó ấn Enter → F4(OK), rồi ngắm chính xác vào mục tiêu và ấn F1 (ALL) để đo.
.jpg)
Ấn phím F2 (NextPt) để chuyển sang điểm khác khi đã đo xong điểm thứ nhất, để đo tới các điểm tiếp theo làm tương tự điểm thứ nhất. Sau khi đã đo đủ số lượng điểm đo cần thiết (đo tới tối thiểu 2 điểm và tối đa 5 điểm):
→ Để xem kết quả toạ độ điểm giao hội, ấn phím F3 (COMPUTE),
→ Để xem phần dư ấn phím [RESID],
→ Để xem độ l ệch tiêu chuẩn ấn phím F3 (StdDev).
→ Để cài đặt toạ độ điểm vừa giao hội được làm toạ độ trạm máy, người sử dụng chỉ việc ấn phím F4 (OK).
Trường hợp 2: Nếu điểm đo tới đã lưu trong bộ nhớ của máy, thì người sử dụng chỉ cần nhập vào tên điểm cần đo tới (ví dụ điểm 5) ở dòng (PtID) và chiều cao gương (hr) sau đó ấn phím F1 (FIND) để tìm điểm đó
Sau đó lựa chọn đúng điểm, ấn phím F4 (OK), màn hình hiện ra:

Tiến hành ngắm chính xác vào điểm đo tới:
- Ấn phím F1 (ALL) để đo,
- Ấn phím F2 (NextPt) để chuyển sang điểm khác khi đã đo xong điểm thứ nhất, để đo tới các điểm tiếp theo làm tương tự điểm thứ nhất. Để xem kết quả giao hội làm tương tự như trường hợp 1.
Kết quả cuối cùng sẽ cho ra tọa độ N(X), E(Y), và cao độ H. Đồng thời máy cũng tính ra phương vị của trạm máy hiện thời. Chính vì thế mà sau khi tiến hành đo giao hội xong người sử dụng có thể chuyển sang chế độ đo khác (Surveying, Stake out,...) mà không cần tiến hành các bước thiết lập trạm máy và thiết lập định hướng nữa. Ngoài ra phép đo giao hội còn đưa ra độ lệch tiêu chuẩn và phần dư để đánh giá độ chính xác của kết quả đo đồng thời cho ta biết được độ ổn định của các điểm toạ độ vừa đo tới.
Chúng ta có thể đo ở một vị trí bàn độ trái hoặc phải hoặc đo ở cả hai vị trí bàn độ, không cần xếp thứ tự điểm và thứ tự mặt ống kính khi đo. Nếu một điểm được đo nhiều lần ở một mặt của ống kính thì phép đo hợp lý sẽ được sử dụng để tính toán.
Nếu phép đo có nhiều hơn số điểm đo cần thiết, bộ xử lý tính toán kết quả sẽ dùng phương pháp số bình phương nhỏ nhất để hiệu chỉnh cho tọa độ phẳng (X, Y), phương pháp trung bình cho cao độ H và góc định hướng.
- Tất cả các phép đo đều được sử lý ở cùng độ chính xác cho dù chúng được đo ở một vị trí bàn độ hay ở cả hai vị trí bàn độ.
- Tọa độ Y và X được xác định bằng phương pháp số bình phương nhỏ nhất, bao gồm cả độ lệch tiêu chuẩn.
- Cao độ cuối cùng được tính toán từ sự trung bình của các chênh cao so với điểm gốc.
- Góc định hướng được tính trung bình từ phép đo ở 2 vị trí bàn độ và vị trí mặt bằng đã được tính toán.
>>> Lưu ý một số thông điệp hiện thị khi đo:
"Max 5 points supported !" Máy chỉ cho phép đo tối đa 5 điểm.
"Invalid data- no position computed !" "Không cho phép tính ra tọa độ trạm vì đã có dữ liệu không đúng .
"Invalid data- no height computed!": Hoặc cao độ của điểm đo không hợp lệ hoặc là không đủ dữ liệu đo để tính ra cao độ của trạm máy.
"Insufficient space in job !" Job hiện thời đã đầy không cho phép lưu trữ thêm dữ liệu.
"Hz (I-II) >0.9 deg, measure point again !" Lỗi này xảy ra nếu điểm đo được đo ở hai vị trí bàn độ mà sự khác nhau về góc bằng lớn hơn 180o ± 0.9o.
"V(I-II) > 0.9 deg, measure again !" Lỗi này xảy ra nếu điểm đo được đo ở hai vị trí bàn độ mà sự khác nhau về góc đứng lớn hơn 360o - V± 0.9o.
"More points or distance required !" " Yêu cầu đo thêm điểm hoặc khoảng cách" vì không đủ dữ liệu đo để tính ra tọa độ trạm.
5. Hướng dẫn giao hội máy toàn đạc Sokkia
- Bước 1: Nhấn phím FUNC trên màn hình máy toàn đạc Sokkia đến khi màn hình xuất hiện bạn tiếp tục nhấn vào F1 (MENU).
- Bước 2: Sau khi nhấn vào MENU tiếp tục chọn RESECTION để bắt đầu chức năng giao hội.
- Bước 3: Tiếp theo nhấn chọn NEZ để nhập tọa độ của 2 điểm mốc dùng để giao hội. Sau đó bạn chọn EDIT (F3) hoặc nhấn READ để đọc số liệu hiện sẵn trong màn hình máy.
Tiếp theo bạn nhập tọa độ điểm số 2, sau khi nhập tọa độ 2 điểm xong nhấn F4 (MEAS) để đo về các điểm gốc và nhấn F19 (DIST). Sau đó nhấn F4 (YES) để đo điểm số 1. Sau khi đo điểm 1 tiến hành đo điểm 2.
- Bước 4: Tiếp theo nhấn CALC để tiến hành tính toán tọa độ giao hội điểm đặt máy.
Trên màn hình sẽ báo sai số vị trí điểm deltaX, deltaY nếu chấp nhận sai số bạn nhấn REC (F3) để ghi lại tọa độ điểm đặt máy sau giao hội để dùng cho công tác bố trí điểm hoặc các công tác đo đạc khảo sát địa hình.
>>> Lưu ý:
Trên hiện trường bạn cần tìm điểm đặt máy hợp lý nhằm đảm bảo độ chính xác cao. Bạn cần chọn địa điểm đặt thiết bị sao cho tam giác hợp bởi điểm đặt máy và hai điểm gốc là tam giác cân, để đảm bảo giao hội máy toàn đạc được cho các kết quả đo chính xác nhất.
Sau khi đo giao hội xong, bạn cần tiến hành kiểm tra các tọa độ điểm gốc xem có bị sai số không. Tiếp theo mới tiến hành bố trí các điểm của công trình hoặc vào chức năng đo đạc chi tiết của máy để đo khảo sát địa hình khu vực để lập bản đồ hay đo đạc tính toán khối lượng đào đắp. Nên sử dụng các thiết bị như máy thủy bình để dẫn truyền cao độ một cách chuẩn xác nhất.
 (30).png)


