




















12:00:00
25/06/2026
Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline 0913. 051.734 để được hỗ trợ!
Vậy vì sao máy GPS RTK không phải lúc nào cũng FIX được? Bài viết dưới đây sẽ tổng hợp những nguyên nhân thường gặp và một số giải pháp giúp cải thiện khả năng FIX ngoài thực địa.
I. Trạng thái FIX trong RTK là gì?
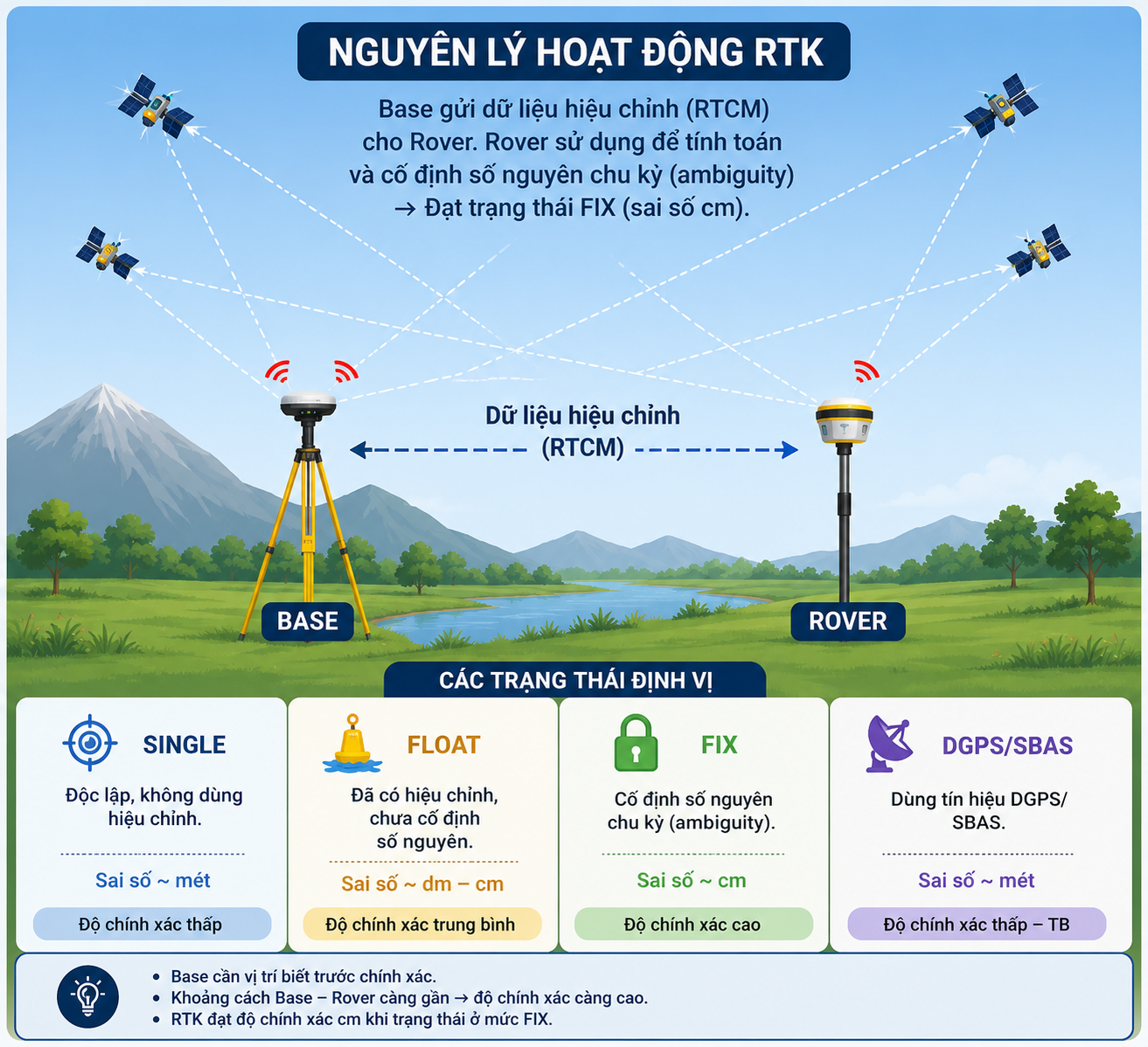
Trong công nghệ GNSS RTK, trạng thái FIX (Fixed Solution) là khi bộ thu đã giải được số nguyên chu kỳ sóng mang (Integer Ambiguity). Khi đó, hệ thống có thể xác định tọa độ với độ chính xác ở mức centimet trong điều kiện làm việc phù hợp.
Thông thường, máy RTK sẽ hiển thị một trong các trạng thái sau:
- Single: Định vị độc lập bằng tín hiệu vệ tinh, sai số thường ở mức vài mét.
- DGPS/SBAS: Có dữ liệu hiệu chỉnh, độ chính xác được cải thiện so với Single nhưng chưa đạt mức RTK.
- Float: Đã nhận dữ liệu cải chính nhưng chưa giải được hoàn toàn số nguyên chu kỳ sóng mang.
- FIX: Định vị RTK với độ chính xác cao, đáp ứng phần lớn yêu cầu của công tác trắc địa.
Cần lưu ý rằng, trạng thái FIX không đồng nghĩa với việc kết quả luôn chính xác tuyệt đối. Độ tin cậy của phép đo còn phụ thuộc vào điều kiện quan sát vệ tinh, môi trường làm việc, cấu hình hệ tọa độ và việc kiểm tra chất lượng số liệu ngoài thực địa.
1. Không đủ vệ tinh hoặc hình học vệ tinh không thuận lợi
Để đạt được nghiệm FIX, máy RTK cần quan sát đồng thời đủ số lượng vệ tinh với sự phân bố hợp lý trên bầu trời. Máy có thể khó FIX hoặc FIX chậm khi làm việc trong các môi trường như:
- Gần nhà cao tầng.
- Hẻm sâu.
- Khu vực có nhiều cây lớn.
- Dưới mái che hoặc trong nhà xưởng.
- Địa hình núi đá che khuất bầu trời.
Ngoài số lượng vệ tinh, chỉ số PDOP (Position Dilution of Precision) cũng ảnh hưởng đáng kể đến khả năng FIX. Dù quan sát được nhiều vệ tinh, nếu hình học vệ tinh không thuận lợi thì thời gian FIX vẫn có thể kéo dài hoặc nghiệm FIX kém ổn định.

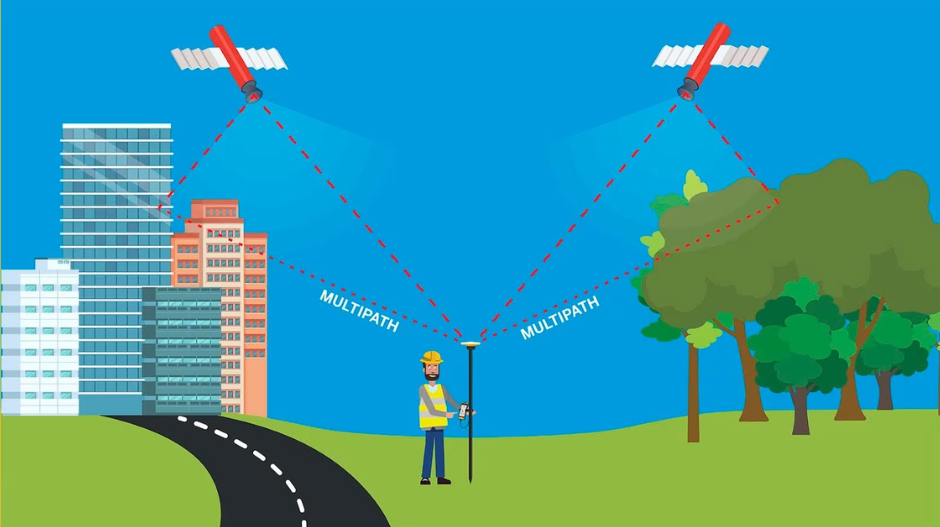
2. Hiện tượng đa đường tín hiệu (Multipath)
Đa đường tín hiệu là một trong những nguyên nhân phổ biến khiến máy RTK khó giữ FIX. Hiện tượng này xảy ra khi tín hiệu GNSS bị phản xạ qua các bề mặt như:
- Tường kính.
- Nhà thép tiền chế.
- Kết cấu kim loại.
- Xe ô tô hoặc container.
- Mặt nước.
- Hàng rào thép.
Khi bộ thu nhận đồng thời tín hiệu trực tiếp và tín hiệu phản xạ, việc xác định pha sóng mang trở nên khó khăn hơn, khiến nghiệm RTK thiếu ổn định.
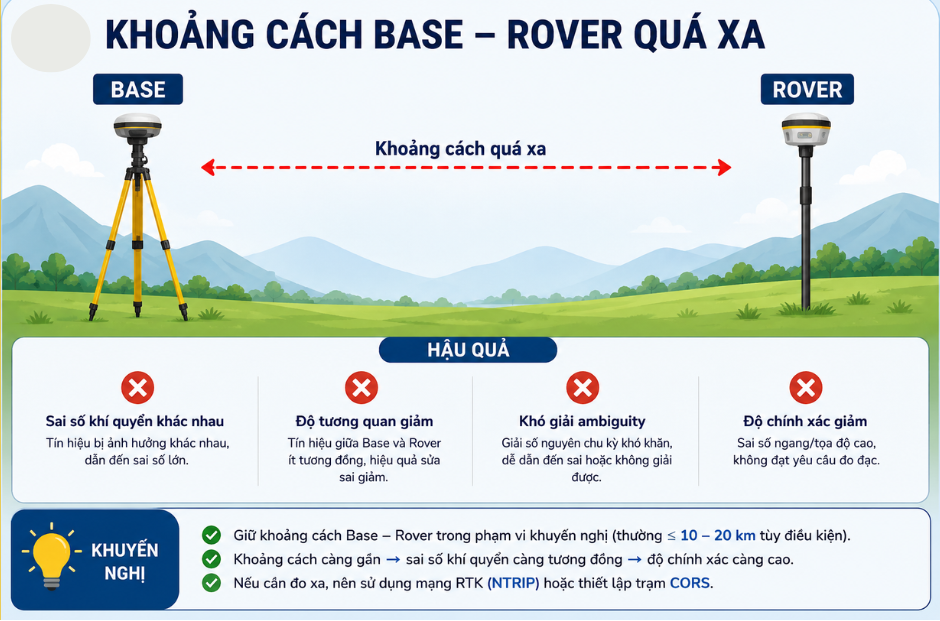
3. Khoảng cách giữa Base và Rover quá lớn
Trong hệ thống RTK Base – Rover truyền thống, khoảng cách giữa hai máy ảnh hưởng trực tiếp đến chất lượng dữ liệu cải chính. Trong điều kiện các yếu tố khác tương đương, khoảng cách giữa Base và Rover càng lớn thì việc giải nghiệm RTK thường càng khó khăn hơn.
Khi khoảng cách tăng lên:
- Sai số tầng điện ly và tầng đối lưu giữa hai điểm tăng.
- Mức độ tương quan của tín hiệu giảm.
- Thời gian FIX có thể lâu hơn.
- Khả năng giữ FIX giảm trong điều kiện khó.
Đối với RTK Network sử dụng CORS (VRS, iMAX hoặc Single Base), người dùng thường không làm việc với một trạm Base duy nhất. Khả năng FIX còn phụ thuộc vào mật độ mạng CORS, thuật toán xử lý của hệ thống và điều kiện quan sát vệ tinh.
4. Kết nối Internet hoặc dữ liệu cải chính không ổn định
Khi sử dụng RTK Network thông qua NTRIP, dữ liệu RTCM phải được truyền liên tục từ máy chủ CORS đến Rover. Một số nguyên nhân thường gặp gồm:
- Sóng 4G/5G yếu.
- Wi-Fi không ổn định.
- Server CORS bị gián đoạn.
- Chỉ số Age of Differential tăng cao.
Khi đó, dữ liệu cải chính có thể bị trễ hoặc gián đoạn. Tùy từng hãng và từng dòng máy, một số thiết bị có thể duy trì nghiệm FIX trong thời gian ngắn nhờ các tính năng như RTK Hold, RTK Keep hoặc các cơ chế tương tự. Tuy nhiên, nếu việc gián đoạn kéo dài, máy thường sẽ chuyển sang FLOAT hoặc SINGLE.
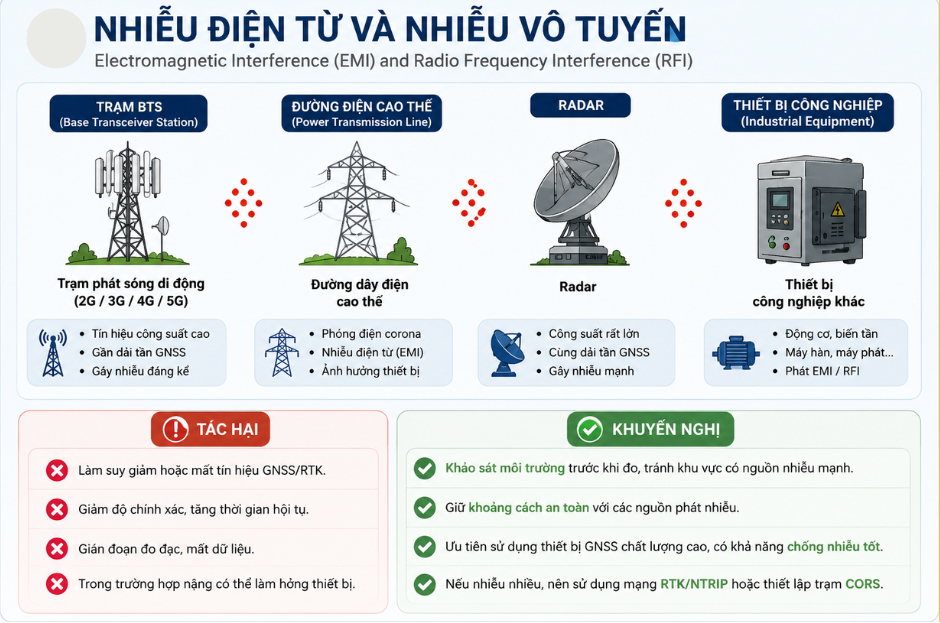
5. Nhiễu điện từ và nhiễu vô tuyến
Tín hiệu GNSS từ vệ tinh có công suất rất nhỏ khi đến mặt đất nên dễ bị ảnh hưởng bởi các nguồn nhiễu mạnh. Một số nguồn nhiễu thường gặp gồm:
- Trạm BTS.
- Radar.
- Đường dây điện cao thế.
- Máy phát sóng công suất lớn.
- Hệ thống radio công nghiệp.
Đối với RTK sử dụng Radio UHF, nhiễu vô tuyến còn có thể làm giảm chất lượng liên lạc giữa Base và Rover.
6. Anten GNSS bị che khuất hoặc lắp đặt chưa phù hợp
Khả năng thu tín hiệu của máy RTK phụ thuộc rất nhiều vào vị trí đặt anten. Một số tình huống có thể làm giảm chất lượng tín hiệu gồm:
- Đứng quá sát tường.
- Đặt gần xe ô tô.
- Gần mái tôn hoặc kết cấu kim loại.
- Anten bị che bởi người đo.
- Cáp hoặc anten bị hư hỏng.
Lựa chọn vị trí đặt máy thông thoáng luôn là một trong những giải pháp đơn giản nhưng mang lại hiệu quả cao.
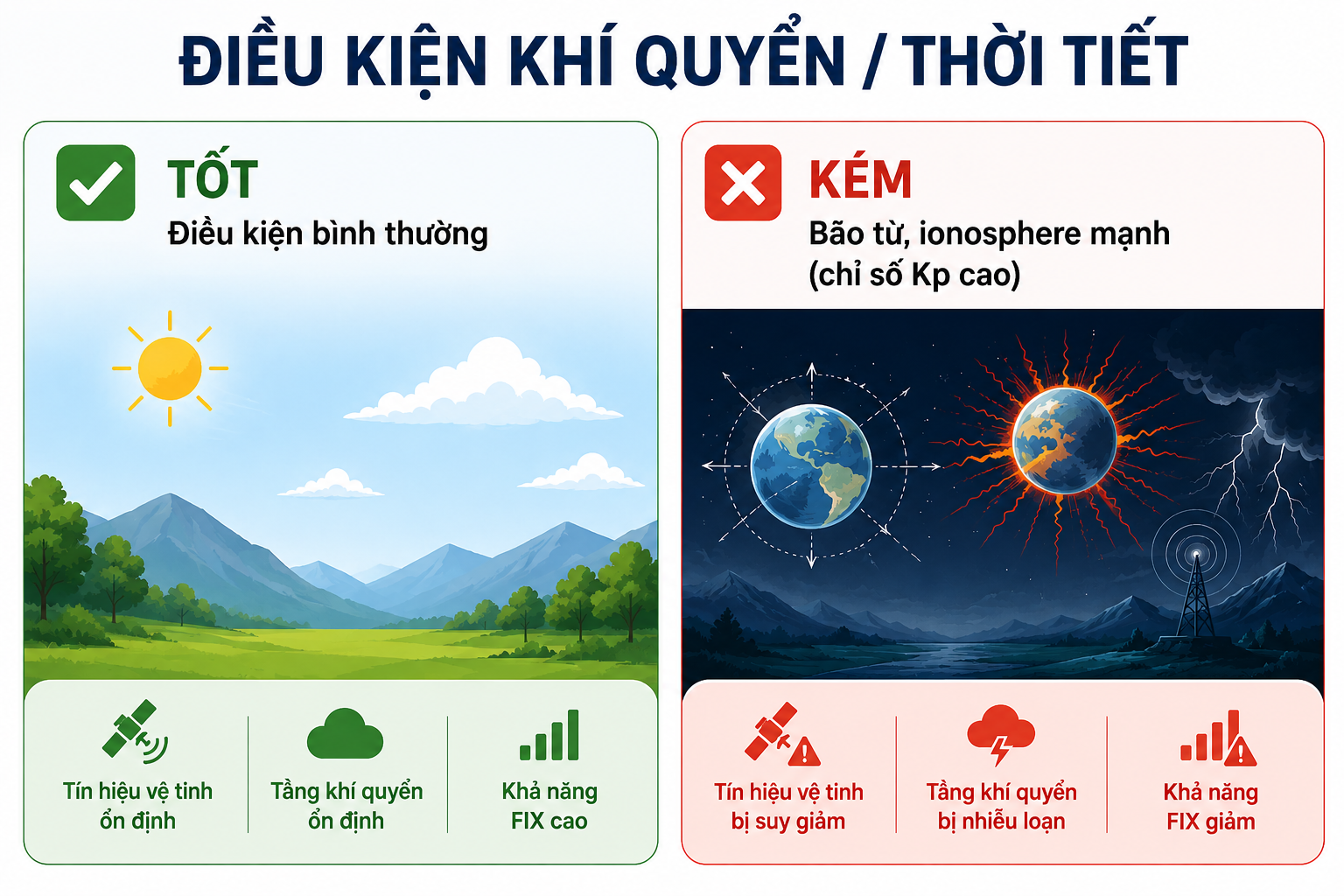
7. Điều kiện khí quyển và hoạt động không gian
Tín hiệu GNSS chịu ảnh hưởng của tầng điện ly và tầng đối lưu. Trong các thời điểm như:
- Bão từ.
- Chỉ số Kp cao.
- Hoạt động điện ly mạnh.
8. Firmware hoặc cấu hình máy chưa phù hợp
Các bản cập nhật firmware mới có thể:
- Cải thiện thuật toán RTK.
- Hỗ trợ thêm tín hiệu GNSS mới.
- Khắc phục các lỗi đã được nhà sản xuất ghi nhận.
- Tăng khả năng tương thích với các chuẩn RTCM.
Ngoài ra, một số cấu hình chưa phù hợp cũng có thể ảnh hưởng đến khả năng FIX, chẳng hạn như:
- Chỉ bật một số hệ vệ tinh.
- Thiết lập góc cắt vệ tinh chưa hợp lý.
- Sai thông số truyền Radio giữa Base và Rover.
Người dùng nên cập nhật firmware theo khuyến nghị của nhà sản xuất và kiểm tra lại cấu hình trước khi làm việc ngoài hiện trường.
9. Hiệu năng của từng dòng máy RTK
Không phải mọi bộ thu GNSS RTK đều có khả năng làm việc giống nhau. Hiệu năng của thiết bị phụ thuộc vào nhiều yếu tố như:
- Thiết kế anten GNSS.
- Chip xử lý tín hiệu.
- Thuật toán RTK.
- Khả năng chống đa đường.
- Tốc độ xử lý dữ liệu.
- Mức độ tối ưu của phần mềm điều khiển.
Vì vậy, ngay cả khi làm việc trong cùng điều kiện hiện trường, tốc độ FIX và khả năng giữ FIX giữa các dòng máy cũng có thể khác nhau.
10. Máy vẫn FIX nhưng tọa độ bị sai
Đây là lỗi thường bị nhầm với hiện tượng "không FIX". Trong nhiều trường hợp, máy vẫn báo FIX bình thường nhưng tọa độ sai đáng kể do:
- Chọn sai hệ tọa độ.
- Sai kinh tuyến trục.
- Sai múi chiếu.
- Sai mô hình geoid.
- Sai tham số chuyển đổi.
Khi gặp tình huống này, cần kiểm tra lại cấu hình hệ quy chiếu trước khi nghi ngờ chất lượng tín hiệu GNSS.

II. Làm thế nào để cải thiện khả năng FIX?
Để nâng cao khả năng FIX khi đo RTK, người dùng nên:
- Chọn vị trí đo thông thoáng.
- Hạn chế làm việc gần các bề mặt phản xạ mạnh.
- Kiểm tra số lượng vệ tinh và chỉ số PDOP.
- Đảm bảo kết nối Internet hoặc Radio ổn định.
- Theo dõi chỉ số Age of Differential.
- Kiểm tra đúng cấu hình hệ tọa độ trước khi đo.
- Cập nhật firmware theo khuyến nghị của nhà sản xuất.
- Kiểm tra định kỳ anten và phụ kiện.
- Đo kiểm trên các điểm khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác.
Không chỉ dựa vào trạng thái FIX, nên kiểm tra trên mốc khống chế hoặc đo lặp các điểm quan trọng khi cần xác nhận độ chính xác.
>>> Máy GPS RTK không phải lúc nào cũng đạt trạng thái FIX ngay sau khi khởi động. Khả năng FIX phụ thuộc vào nhiều yếu tố như điều kiện quan sát vệ tinh, hiện tượng đa đường, chất lượng dữ liệu cải chính, kết nối Internet hoặc Radio, điều kiện khí quyển, cấu hình thiết bị và môi trường làm việc.
Trong thực tế, trạng thái FIX là điều kiện cần nhưng chưa phải điều kiện đủ để khẳng định chất lượng kết quả đo. Bên cạnh việc theo dõi trạng thái FIX, người sử dụng vẫn nên kết hợp kiểm tra trên mốc khống chế, đo lặp các điểm quan trọng và đánh giá điều kiện hiện trường nhằm đảm bảo độ tin cậy của số liệu.
Hiểu rõ các nguyên nhân trên sẽ giúp kỹ sư trắc địa xử lý nhanh các tình huống ngoài thực địa, lựa chọn phương án đo phù hợp và khai thác hiệu quả hơn công nghệ GNSS RTK.
 (Ảnh bìa Facebook).png)


