

















12:00:00
22/12/2025
Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline 0913. 051.734 để được hỗ trợ!
Bài viết này trình bày các phương pháp hiệu chỉnh GNSS chính:
- DGNSS (GNSS vi sai)
- SBAS (Hệ thống tăng cường vệ tinh)
- RTK (Động học thời gian thực)
- PPP (Định vị điểm chính xác)
- PPP-RTK
GNSS định vị tiêu chuẩn hoạt động như thế nào?
- Ai: định danh vệ tinh.
- Ở đâu: vị trí quỹ đạo.
- Khi nào: thời điểm phát tín hiệu.
Tín hiệu GNSS bị ảnh hưởng bởi nhiều nguồn sai số:
- Tầng điện ly & đối lưu làm chậm và bẻ cong tín hiệu.
- Sai số đồng hồ & quỹ đạo vệ tinh.
- Đa đường (multipath) do phản xạ từ nhà cửa, cây cối.
1. Differential GNSS (DGNSS – GNSS vi sai)
Nguyên lý:
Định vị tương đối bằng cách so sánh số liệu giữa máy rover và trạm tham chiếu có tọa độ đã biết chính xác.
Cách hoạt động:
- Trạm base tính sai số pseudorange cho từng vệ tinh
- Phát các hiệu chỉnh này cho rover
- Rover áp dụng hiệu chỉnh để loại bỏ sai số chung
Độ chính xác: Dưới 1 mét
Ưu điểm
- Dễ triển khai
- Tiêu thụ điện thấp
- Thời gian hội tụ nhanh
Nhược điểm
- Độ chính xác thấp hơn RTK/PPP
- Phụ thuộc khoảng cách đến trạm base
Ứng dụng: Hàng hải, nông nghiệp mức cơ bản, thiết bị GNSS pin nhỏ.
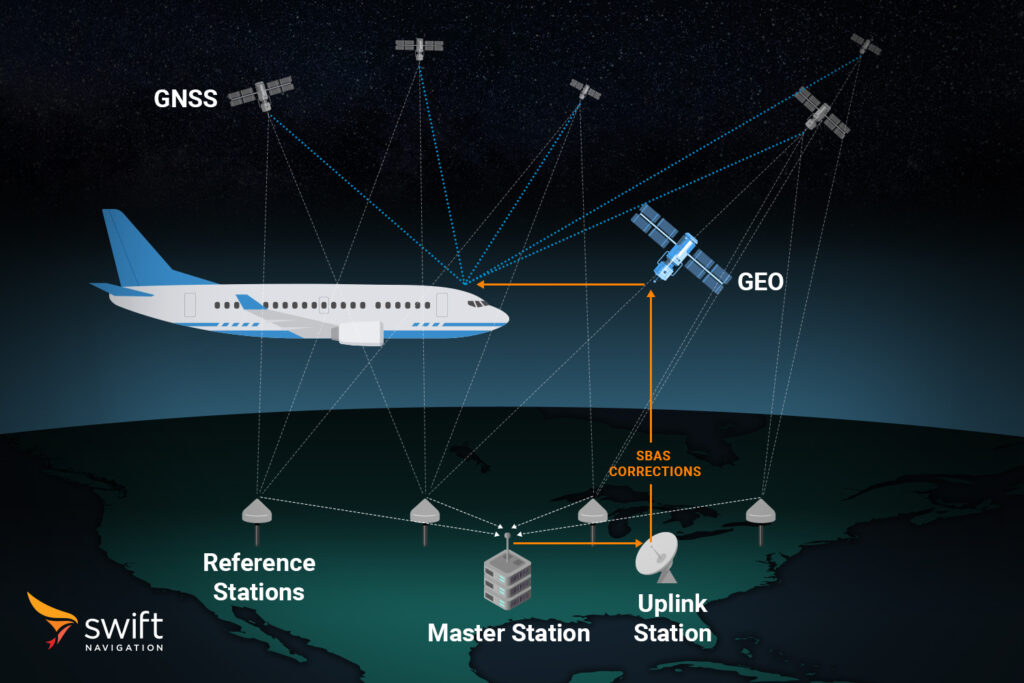
2. SBAS – Hệ thống tăng cường vệ tinh
Nguyên lý: Tương tự DGNSS nhưng hiệu chỉnh được tính toán tập trung và phát qua vệ tinh địa tĩnh.
Ví dụ SBAS:
- WAAS (Mỹ)
- EGNOS (Châu Âu)
- MSAS (Nhật Bản)
Độ chính xác: ~1–3 m
Ưu điểm
- Miễn phí
- Phủ rộng khu vực lớn
- Không cần base cục bộ
Nhược điểm
- Độ chính xác hạn chế
- Khó thu vệ tinh địa tĩnh ở đô thị / vĩ độ cao
Ứng dụng: Hàng không, Hàng hải, Nông nghiệp quy mô lớn.
3. RTK – Real-Time Kinematic
Nguyên lý: Sử dụng đo pha sóng mang (carrier-phase) kết hợp hiệu chỉnh thời gian thực từ trạm base.
Đặc điểm kỹ thuật:
- Bước sóng L1 GPS ≈ 19 cm
- Giải ẩn số nguyên (integer ambiguity)
- Sử dụng double differencing + thuật toán LAMBDA
Độ chính xác: 1–2 cm
Thời gian fix: vài giây
Ưu điểm: Độ chính xác cao nhất, hội tụ cực nhanh
Nhược điểm
- Phạm vi giới hạn (≈ 20–30 km)
- Cần kết nối ổn định (radio / NTRIP)
Ứng dụng
- Trắc địa
- Thi công – stakeout
- Robot, UAV
- Nông nghiệp chính xác
4. PPP – Precise Point Positioning
Nguyên lý: Định vị tuyệt đối bằng cách áp dụng:
- Quỹ đạo vệ tinh chính xác
- Đồng hồ vệ tinh chính xác
- Mô hình khí quyển toàn cầu
Đặc điểm:
- Không cần trạm base cục bộ
- Hội tụ bằng cách tự giải ẩn số pha
Độ chính xác: cm (tĩnh)
Thời gian hội tụ: 10–30 phút
Ưu điểm
- Phủ toàn cầu
- Phù hợp vùng xa, biển khơi
Nhược điểm
- Hội tụ chậm
- Không phù hợp ứng dụng cần real-time
Ứng dụng
- Hàng hải – ngoài khơi
- Khoa học – địa vật lý
- Đo đạc khu vực hẻo lánh
5. PPP-RTK – Phương pháp lai hiện đại
Nguyên lý: Là sự kết hợp giữa:
- Hiệu chỉnh vệ tinh chính xác của PPP
- Hiệu chỉnh khí quyển & pha kiểu RTK
Công nghệ cốt lõi:
- SSR (State Space Representation)
- Wide-lane ambiguity resolution (bước sóng dài → fix nhanh)
Độ chính xác: 3–7 cm
Thời gian hội tụ: 10–30 giây
Ưu điểm
- Nhanh hơn PPP
- Phủ rộng hơn RTK
- Mở rộng cho số lượng người dùng lớn
Nhược điểm
- Cần máy GNSS đa tần hiện đại
- Độ chính xác thấp hơn RTK cự ly ngắn
Ứng dụng
- Xe tự lái – ADAS
- UAV
- Quản lý đội xe
- Nông nghiệp thông minh
BẢNG SO SÁNH
| Phương pháp | Độ chính xác | Thời gian fix | Phạm vi |
|---|---|---|---|
| GNSS thường | 5–10 m | Vài giây | Toàn cầu |
| SBAS | 1–3 m | ~30 s | Lục địa |
| DGNSS | <1 m | 5–20 s | Cục bộ |
| PPP | ~10 cm | 10–30 phút | Toàn cầu |
| PPP-RTK | 3–7 cm | 10–30 s | Khu vực |
| RTK | 1–2 cm | ~5 s | ≤30 km |
>>> Không có phương pháp hiệu chỉnh GNSS nào “tốt nhất cho mọi trường hợp”. Chỉ có phương pháp phù hợp nhất với yêu cầu công việc:
- Cần nhanh – chính xác tuyệt đối → RTK
- Cần phủ rộng – không cần base → PPP / PPP-RTK
- Cần ổn định – tiết kiệm năng lượng → DGNSS / SBAS
.png)


