














12:00:00
26/06/2026
Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline 0913. 051.734 để được hỗ trợ!
Trong đo GNSS RTK, nhiều người thường tập trung vào Rover mà quên rằng Base Station mới là nguồn phát dữ liệu hiệu chỉnh cho toàn bộ hệ thống. Nếu Base được thiết lập không đúng, sai số sẽ được truyền đến Rover, ảnh hưởng trực tiếp đến kết quả đo, stake out hoặc đo hoàn công.
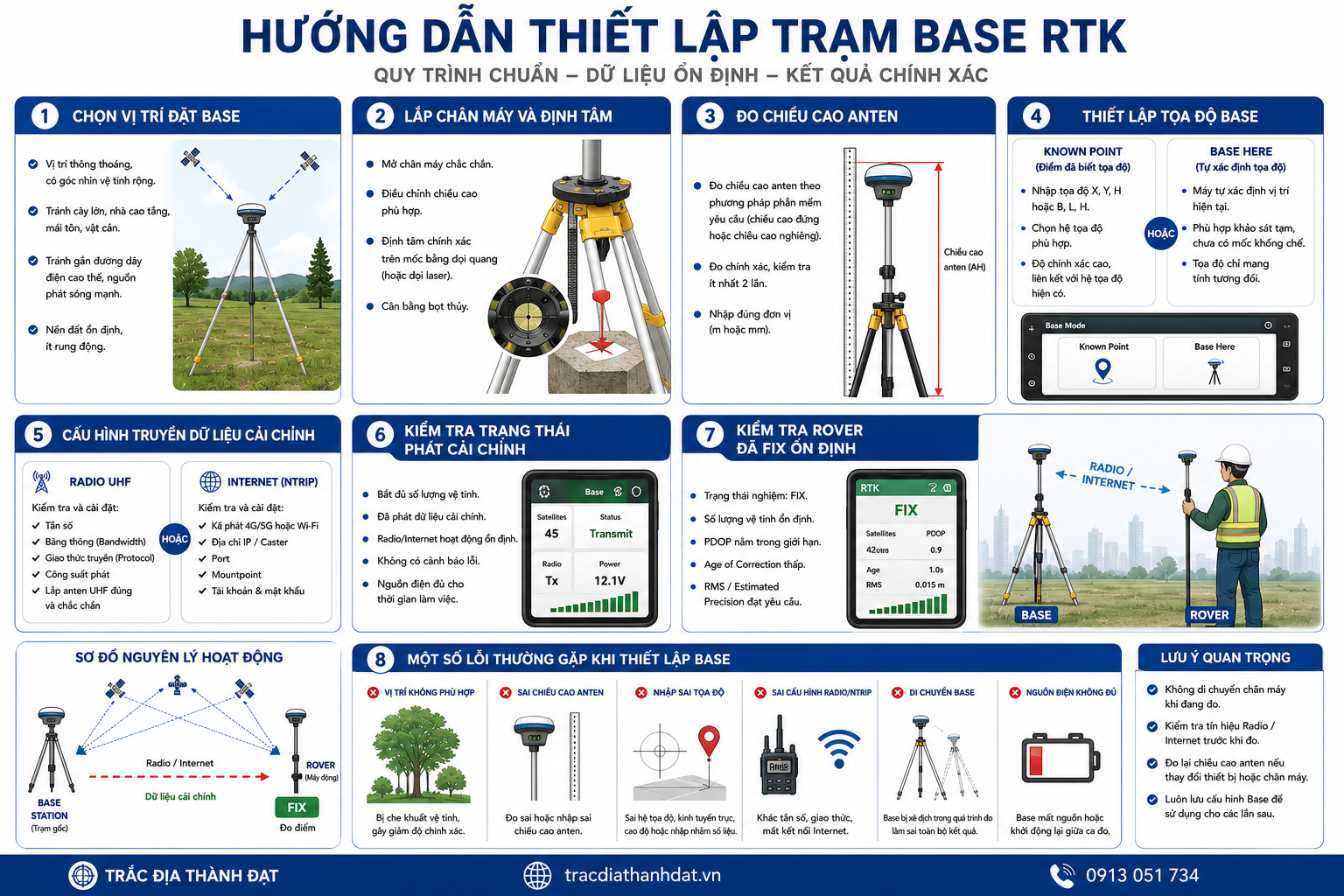
Mặc dù giao diện phần mềm của mỗi hãng có thể khác nhau, quy trình thiết lập Base nhìn chung đều tuân theo các nguyên tắc giống nhau. Dưới đây là các bước cơ bản giúp triển khai một trạm Base RTK ổn định và đáng tin cậy.

1. Chọn vị trí đặt Base
Đây là bước quan trọng nhất trước khi bật máy. Một vị trí tốt nên đáp ứng các điều kiện sau:
- Thông thoáng, có góc quan sát bầu trời rộng.
- Tránh cây lớn, mái che hoặc công trình cao tầng che khuất vệ tinh.
- Hạn chế đặt gần tường kính, mái tôn hoặc mặt nước để giảm hiện tượng phản xạ tín hiệu (Multipath).
- Tránh gần đường dây điện cao thế hoặc nguồn phát sóng mạnh nếu có thể.
- Nền đất hoặc mặt bằng ổn định, ít rung động.
Nếu đặt Base trên mốc khống chế, cần đảm bảo mốc không bị xê dịch trong suốt quá trình đo.
2. Lắp chân máy và định tâm
Sau khi chọn vị trí phù hợp:
- Mở chân máy chắc chắn.
- Điều chỉnh chiều cao thuận tiện cho việc thao tác.
- Định tâm chính xác trên mốc bằng dọi quang học hoặc dọi laser (nếu có).
- Cân bằng bọt thủy theo hướng dẫn của thiết bị.
Trong trường hợp sử dụng chân máy thông thường ngoài hiện trường, nên kiểm tra lại việc định tâm sau khi siết chặt các khóa chân máy vì quá trình thao tác có thể làm lệch vị trí ban đầu.
3. Đo chiều cao anten
Chiều cao anten là một thông số rất quan trọng. Thông thường, phần mềm sẽ yêu cầu người dùng nhập:
- Chiều cao nghiêng (Slant Height), hoặc
- Chiều cao đứng (Vertical Height).
Cần đo đúng theo phương pháp mà phần mềm yêu cầu.
> Một số lưu ý:
- Sử dụng thước chuyên dụng nếu có.
- Đo ít nhất hai lần để kiểm tra.
- Kiểm tra lại đơn vị (mét hoặc milimét).
- Không ước lượng bằng mắt.
Việc nhập sai chiều cao anten sẽ làm sai tọa độ của trạm Base và có thể ảnh hưởng đến toàn bộ dữ liệu hiệu chỉnh RTK.
4. Thiết lập tọa độ Base
Đây là bước quyết định hệ quy chiếu mà Rover sẽ sử dụng.
4.1 Trường hợp 1: Base đặt trên điểm đã biết tọa độ (Known Point)
Đây là phương pháp được ưu tiên. Người dùng nhập chính xác:
- Tọa độ X, Y, H hoặc B, L, H.
- Hệ tọa độ tương ứng.
- Chiều cao anten.
Sau khi xác nhận, Base sẽ phát dữ liệu hiệu chỉnh dựa trên tọa độ đã biết.
> Ưu điểm:
- Độ tin cậy cao.
- Phù hợp với đo địa chính, khảo sát công trình, hoàn công và các công việc yêu cầu liên kết với hệ tọa độ hiện có.
4.2 Trường hợp 2: Base Here (Base tự xác định tọa độ)
Nếu chưa có mốc khống chế, người dùng có thể để máy tự xác định vị trí hiện tại (Base Here hoặc Autonomous).
Phương pháp này thường được sử dụng khi:
- Khảo sát sơ bộ.
- Thành lập lưới khống chế tạm.
- Công trình chưa yêu cầu liên kết với hệ tọa độ chính thức.
Lưu ý rằng tọa độ Base Here chỉ mang tính tương đối. Nếu cần liên kết với hệ tọa độ công trình hoặc VN-2000, nên đo khống chế hoặc sử dụng các phương pháp chuyển đổi phù hợp trước khi triển khai chính thức.
5. Cấu hình truyền dữ liệu cải chính
Sau khi Base có tọa độ, cần cấu hình phương thức truyền dữ liệu hiệu chỉnh đến Rover. Hai phương thức phổ biến hiện nay là:
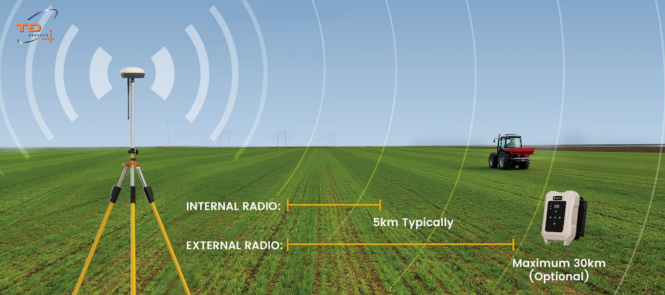
5.1 Truyền bằng Radio UHF
Khi dùng phương thức này cần kiểm tra:
- Tần số phát.
- Băng thông (Bandwidth).
- Giao thức truyền (Protocol).
- Công suất phát.
- Anten UHF đã được lắp đúng.
5.2 Truyền qua Internet (NTRIP)
Trong trường hợp sử dụng mạng Internet nội bộ hoặc triển khai Base riêng:
- Kiểm tra kết nối 4G/5G hoặc Wi-Fi.
- Kiểm tra địa chỉ IP hoặc Caster.
- Kiểm tra Port.
- Mountpoint.
- Tài khoản và mật khẩu nếu có.
6. Kiểm tra trạng thái phát cải chính
Sau khi hoàn tất cấu hình, cần kiểm tra:
- Base đã bắt đủ số lượng vệ tinh.
- Đã bắt đầu phát dữ liệu cải chính.
- Không xuất hiện cảnh báo lỗi.
- Radio hoặc Internet hoạt động ổn định.
- Pin hoặc nguồn ngoài đủ cho thời gian làm việc.
Đối với các hệ thống Radio, nên kiểm tra thêm cường độ tín hiệu giữa Base và Rover trước khi bắt đầu đo.
7. Kiểm tra Rover đã FIX ổn định
Sau khi Rover kết nối với Base, không nên đo ngay.
Nên kiểm tra:
- Trạng thái nghiệm đạt FIX.
- Số lượng vệ tinh ổn định.
- PDOP ở mức phù hợp.
- Age of Correction thấp và ổn định.
- Sai số RMS hoặc Estimated Precision nằm trong giới hạn cho phép của công việc.
- Khoảng cách đến Base.
- Tín hiệu Radio hoặc Internet.
- Điều kiện che khuất vệ tinh.
- Cấu hình truyền dữ liệu.
8. Một số lỗi thường gặp khi thiết lập Base
- Chọn vị trí đặt Base không phù hợp
- Đo sai chiều cao anten
- Nhập sai tọa độ Base
- Sai cấu hình Radio
- Di chuyển Base trong khi đang đo
- Nguồn điện không đủ
>>> Thiết lập Base RTK không chỉ là vài thao tác trên bộ điều khiển mà còn bao gồm việc lựa chọn vị trí đặt máy, định tâm chính xác, nhập đúng chiều cao anten, cấu hình tọa độ và kiểm tra trạng thái hoạt động của toàn bộ hệ thống. Thực hiện đúng các bước ngay từ đầu sẽ giúp Rover nhận dữ liệu hiệu chỉnh ổn định, giảm thời gian xử lý sự cố ngoài thực địa và nâng cao độ tin cậy của kết quả đo.
Mặc dù tên gọi các chức năng hoặc giao diện có thể khác nhau giữa các hãng, nguyên tắc thiết lập trạm Base về cơ bản vẫn tương tự. Nắm vững các nguyên lý này sẽ giúp người sử dụng dễ dàng làm việc với nhiều dòng RTK khác nhau.