




















12:00:00
25/06/2026
Nếu bạn đang tìm kiếm phần mềm trắc địa, các thông tin liên quan về máy móc đo đạc, trắc địa cho dự án của mình bạn đã tìm đúng kho lưu trữ! Trong quá trình sử dụng máy và cài đặt phần mềm, nếu gặp bất cứ vấn đề gì hãy liên lạc với chúng tôi qua số Hotline 0913. 051.734 để được hỗ trợ!
Vậy RTK thực chất đo trong hệ nào?
Máy thu GNSS không đo trực tiếp trong hệ tọa độ VN-2000. Thay vào đó, thiết bị xác định vị trí trong một hệ quy chiếu địa tâm toàn cầu (global geocentric reference frame), chẳng hạn như WGS84 hoặc các realization gần với ITRF (International Terrestrial Reference Frame).
Trong khi đó, tại Việt Nam, phần lớn bản đồ địa hình, bản đồ địa chính, hồ sơ thiết kế và công trình lại sử dụng hệ tọa độ VN-2000 hoặc hệ tọa độ công trình.
Vì vậy, trước khi có thể sử dụng ngoài thực địa, kết quả đo GNSS cần được chuyển đổi sang hệ tọa độ làm việc.
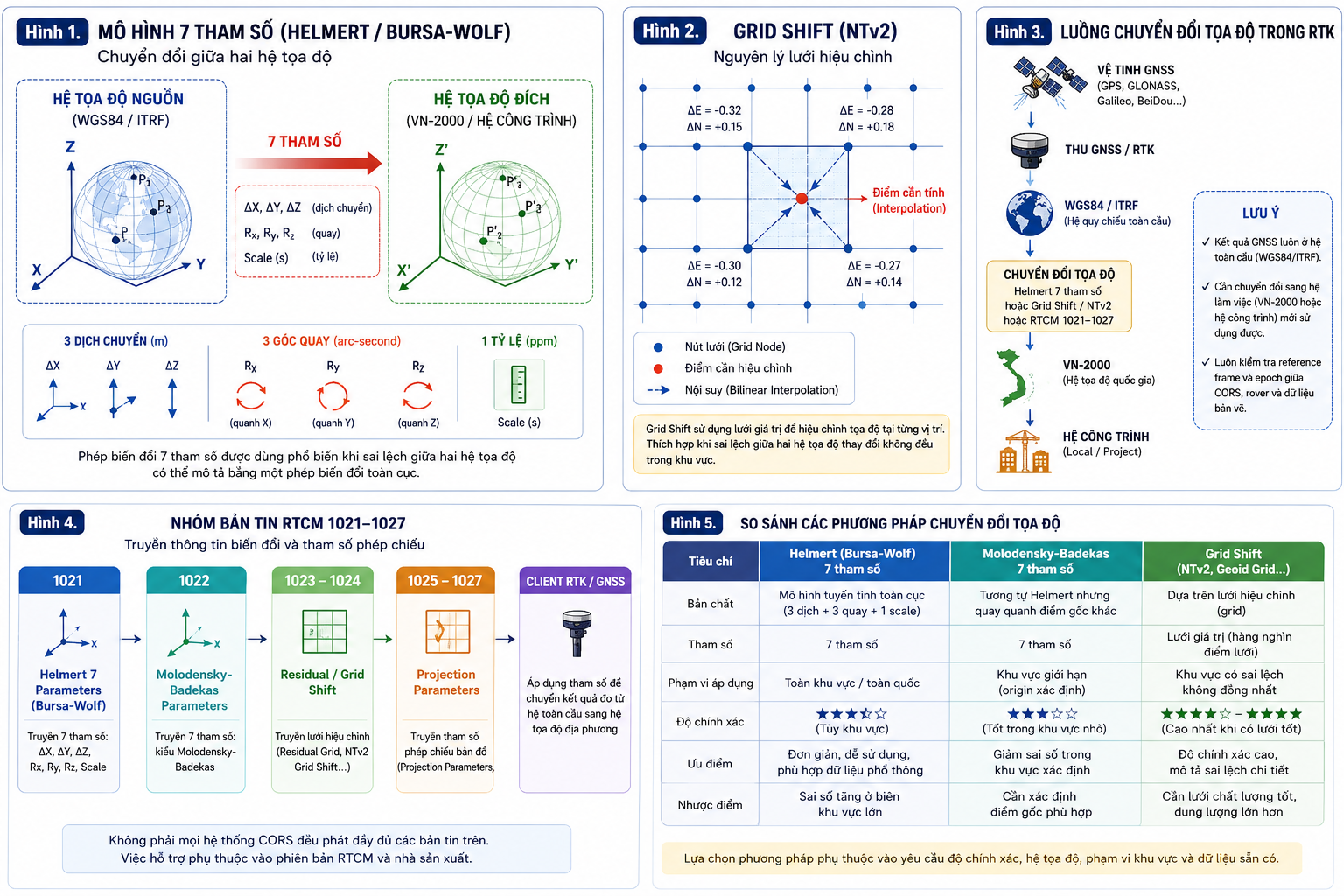
Có thể hình dung quy trình tổng quát như sau: GNSS/RTK → WGS84 hoặc ITRF (realization cụ thể) → Chuyển đổi hệ quy chiếu và phép chiếu bản đồ (khi cần) → VN-2000 hoặc hệ tọa độ công trình.
Lưu ý: WGS84 và ITRF đều có nhiều phiên bản (realizations) được cập nhật theo thời gian. Trong hầu hết công việc RTK thông thường, quá trình này đã được phần mềm RTK hoặc dịch vụ CORS xử lý. Tuy nhiên, với các ứng dụng yêu cầu độ chính xác cao hoặc xử lý dữ liệu nhiều thời kỳ, vẫn cần quan tâm đến reference frame và epoch của dữ liệu.
1. 7 tham số là gì?
Trong trắc địa, một trong những mô hình phổ biến để chuyển đổi giữa hai hệ quy chiếu là phép biến đổi 7 tham số (Seven-Parameter Transformation).
Bộ tham số gồm:
- ΔX: Tịnh tiến theo trục X
- ΔY: Tịnh tiến theo trục Y
- ΔZ: Tịnh tiến theo trục Z
- Rx: Góc quay quanh trục X
- Ry: Góc quay quanh trục Y
- Rz: Góc quay quanh trục Z
- Scale: Hệ số tỷ lệ (ppm)
![]()
Trong đó:
- Ba tham số đầu mô tả sự dịch chuyển giữa hai hệ quy chiếu.
- Ba tham số tiếp theo mô tả sự quay.
- Tham số cuối cùng mô tả sự khác biệt về tỷ lệ.Mô hình này giả thiết rằng mối quan hệ giữa hai hệ quy chiếu có thể được biểu diễn bằng một phép biến đổi gồm ba tham số tịnh tiến, ba tham số quay và một tham số tỷ lệ.
Trong các phần mềm RTK, người dùng có thể gặp nhiều tên gọi như:
- Seven Parameters
- Helmert Transformation
- Bursa-Wolf Transformation
- Datum Transformation
Trong những khu vực có biến dạng không đồng nhất, mô hình này có thể không đạt độ chính xác cao bằng các phương pháp sử dụng lưới hiệu chỉnh (Grid Shift).
2. Bursa-Wolf và Helmert có giống nhau không?
Đây là điểm khá nhiều người nhầm lẫn. Trong nhiều phần mềm RTK, hai tên gọi: Helmert Transformation & Bursa-Wolf Transformation được sử dụng gần như thay thế cho nhau.
Tuy nhiên, xét dưới góc độ học thuật, Bursa-Wolf là một quy ước biểu diễn của phép biến đổi Helmert 7 tham số. Sự khác biệt chủ yếu nằm ở quy ước dấu và cách biểu diễn các tham số quay. Đối với phần lớn công việc RTK ngoài thực địa, sự khác biệt này thường không ảnh hưởng đến quá trình sử dụng nếu các tham số được khai báo đúng theo quy ước mà phần mềm yêu cầu.
3. Ngoài 7 tham số còn có những phương pháp nào?
Không phải mọi phép chuyển đổi tọa độ đều sử dụng mô hình 7 tham số. Một số phương pháp phổ biến khác gồm:
- Molodensky–Badekas
- Grid Shift
Ví dụ: NTv2, Geoid Grid
Đối với những khu vực có biến dạng không đồng đều, Grid Shift thường cho độ chính xác cao hơn mô hình 7 tham số.
4. RTCM 1021–1027 là gì?
RTCM (Radio Technical Commission for Maritime Services) là tiêu chuẩn quốc tế dùng để truyền dữ liệu hiệu chỉnh trong GNSS RTK.
Khi nhắc đến RTCM, nhiều người chỉ nghĩ đến các bản tin phục vụ quá trình FIX. Tuy nhiên, trong tiêu chuẩn RTCM 3.x còn có nhóm bản tin 1021–1027, được định nghĩa để truyền các thông tin liên quan đến phép biến đổi datum, phép chiếu bản đồ và một số mô hình hiệu chỉnh phục vụ chuyển đổi sang hệ tọa độ địa phương.
Theo tài liệu của RTCM SC-104 và một số nhà sản xuất phần mềm GNSS, nhóm bản tin này được thiết kế nhằm hỗ trợ việc chuyển đổi từ hệ quy chiếu GNSS sang hệ tọa độ địa phương.
Tuy nhiên cần lưu ý:
- Không phải mọi mạng CORS đều phát các bản tin này.
- Không phải mọi bộ thu GNSS hoặc phần mềm RTK đều hỗ trợ đầy đủ việc giải mã và áp dụng các bản tin này.
- Việc triển khai có thể khác nhau giữa các phiên bản RTCM, nhà sản xuất thiết bị và dịch vụ CORS.
Vì vậy, không nên mặc định rằng mọi hệ thống CORS đều truyền hoặc sử dụng RTCM 1021–1027.
.jpg)
5. Vì sao có phần mềm RTK không cần nhập 7 tham số?
Trong nhiều trường hợp, người dùng không cần nhập thủ công, nhưng điều đó không có nghĩa quá trình chuyển đổi không tồn tại.
Việc chuyển đổi có thể đã được thực hiện thông qua:
- Cơ sở dữ liệu CRS tích hợp trong phần mềm hoặc bộ điều khiển;
- Ffile hệ tọa độ (CRS/Projection) được import;
- Cấu hình do nhà sản xuất thiết lập;
- Thông tin từ dịch vụ CORS;
- Hoặc các cơ chế chuyển đổi riêng của phần mềm.
Do đó, việc không phải nhập không đồng nghĩa với không sử dụng phép chuyển đổi.
6. Khi nào vẫn phải nhập 7 tham số?
Một số tình huống vẫn cần người dùng thiết lập thủ công, chẳng hạn:
- Sử dụng Base cục bộ;
- Llàm việc với hệ tọa độ công trình;
- Sử dụng hệ tọa độ địa phương chưa có trong phần mềm;
- Chuyển đổi dữ liệu khảo sát cũ;
- Hoặc làm việc với các dự án có quy định riêng về hệ tọa độ.
Khi đó, người dùng có thể phải:
- Nhập 7 tham số;
- Import file hệ tọa độ;
- Hoặc thực hiện Site Calibration (Localization).
7. RTCM 1021–1027 có thay thế Site Calibration không?
Câu trả lời là không. Hai khái niệm này phục vụ những mục đích khác nhau.
RTCM 1021–1027 là nhóm bản tin dùng để truyền các thông tin liên quan đến phép chuyển đổi hệ quy chiếu và phép chiếu bản đồ. Trong khi đó, Site Calibration (Localization) là quá trình thiết lập mối quan hệ giữa hệ tọa độ GNSS và hệ tọa độ của dự án thông qua các điểm khống chế ngoài thực địa.
Site Calibration không thay thế phép chuyển đổi giữa các hệ quy chiếu mà chỉ hiệu chỉnh cục bộ để phù hợp với hệ tọa độ công trình. Ngay cả khi sử dụng mạng CORS và chọn đúng hệ tọa độ, nhiều dự án vẫn yêu cầu kiểm tra trên các mốc khống chế trước khi tiến hành đo chính thức.
8. Những lỗi thường gặp ngoài thực địa
Qua thực tế sử dụng RTK, một số lỗi liên quan đến hệ tọa độ thường gặp gồm:
- Chọn sai kinh tuyến trục.
- Chọn sai múi chiếu.
- Chọn sai mô hình geoid.
- Chọn sai datum hoặc realization.
- Nhập sai đơn vị của Rx, Ry, Rz (độ, giây hoặc radian).
- Nhập sai hệ số Scale (ppm hoặc hệ số tỷ lệ).
- Dùng nhầm hệ tọa độ công trình.
- Tin tưởng trạng thái FIX nhưng không kiểm tra trên mốc khống chế.
Đây đều là những nguyên nhân có thể khiến tọa độ sai hàng mét, thậm chí hàng chục mét dù máy vẫn báo FIX bình thường.
9. Người sử dụng RTK cần quan tâm đến điều gì?
Đối với phần lớn công việc khảo sát, địa chính, thi công hoặc hoàn công, người dùng không nhất thiết phải nhớ chi tiết từng bản tin RTCM.
Điều quan trọng hơn là:
- Tạo đúng Job / Project.
- Chọn đúng hệ tọa độ.
- Chọn đúng kinh tuyến trục.
- Chọn đúng múi chiếu.
- Chọn đúng mountpoint khi dùng CORS.
- Nhập đúng chiều cao anten.
- Kiểm tra lại trên mốc khống chế.
- Không chỉ nhìn trạng thái FIX mà bỏ qua cấu hình hệ tọa độ.
Nếu kết quả đo lệch toàn bộ so với bản vẽ hoặc mốc ngoài thực địa, cần kiểm tra lại hệ tọa độ trước khi nghi ngờ máy RTK hoặc tín hiệu vệ tinh.
>>> RTCM 1021–1027, Helmert, Bursa-Wolf, 7 tham số và Site Calibration đều liên quan đến quá trình đưa kết quả GNSS về hệ tọa độ làm việc, nhưng chúng không phải là các khái niệm tương đương.
- GNSS xác định vị trí trong hệ quy chiếu toàn cầu, thường là WGS84 hoặc các realization gần với ITRF.
- VN-2000 và hệ tọa độ công trình là các hệ tọa độ làm việc được sử dụng trong khảo sát, thiết kế và thi công tại Việt Nam.
- 7 tham số (Bursa-Wolf/Helmert) là một trong những mô hình phổ biến dùng để chuyển đổi tọa độ giữa các hệ quy chiếu.
- RTCM 1021–1027 là nhóm bản tin được thiết kế để hỗ trợ truyền thông tin liên quan đến phép biến đổi tọa độ và phép chiếu bản đồ. Tuy nhiên, việc các bản tin này có được sử dụng hay không còn phụ thuộc vào phiên bản RTCM, hệ thống CORS và phần mềm RTK.
- Site Calibration (Localization) là quá trình hiệu chỉnh cục bộ theo các điểm khống chế của dự án và không nên xem là sự thay thế cho các phép biến đổi giữa các hệ quy chiếu.
Đối với kỹ sư khảo sát và thi công, hiểu đúng vai trò của từng khái niệm sẽ giúp cấu hình RTK chính xác hơn, xử lý tốt các tình huống liên quan đến hệ tọa độ và hạn chế các sai lệch không đáng có ngoài thực địa.
- RTCM Special Committee 104 – RTCM Standard for Differential GNSS (Multiple Signal Messages).
- IOGP – Geomatics Guidance Note 7, Coordinate Conversions and Transformations.
- EPSG Geodetic Parameter Dataset & Guidance Note 7-2.
- ISO 19111 – Geographic Information — Referencing by Coordinates.
- Carlson Software – RTCM 1021–1027 White Paper.
- Leica Geosystems – Captivate Coordinate System Guide.


